Електричні датчики
Контрольно-курсова робота
На тему Електричні датчики
План роботи
1. Класифікація електричних датчиків
2. КОНТАКТНІ ДАТЧИКИ
3. ПОТЕНЦІОМЕТРИЧНІ ДАТЧИКИ
3.1. Призначення. Принцип дії.
3.2. Конструкції датчиків
3.3. Характеристики лінійного потенціометричного датчика
3.4. Реверсивні потенциометрические датчики
3.5. Функціональні потенціометричні датчики
4. ТЕНЗОДАТЧИКИ
4.1 Призначення. Типи тензодатчиків
4.2 Принцип дії дротових тензодатчиків
4.3. Будова дротових тензодатчиків
4.4. Фольгові, плівкові, вугільні і напівпровідникові тензодатчики
5. П'ЄЗОЕЛЕКТРИЧНІ ДАТЧИКИ
5.1 Принцип дії
5.2 Матеріали для виготовлення п'єзоелектричних датчиків
5.3. Будова п’єзодатчиків
6. ЕЛЕКТРОМАГНІТНІ ДАТЧИКИ
6.1 Призначення. Типи електромагнітних датчиків
6.2. Принцип дії індуктивних датчиків
6.3. Диференціальні (реверсивні) індуктивні датчики
6.4. Плунжерні датчики
6.5. Трансформаторні датчики
6.6. Магнітопружні датчики
6.7. Індукційні датчики
7. ЄМНІСНІ ДАТЧИКИ
7.1 Принцип дії. Типи ємнісних датчиків
7.2. Застосування ємнісних датчиків
8. ТЕРМОРЕЗИСТОРИ
8.1. Призначення. Типи терморезисторів
8.2. Металеві терморезистори
8.3. Напівпровідникові терморезистори
8.4. Застосування терморезисторів
9. ТЕРМОЕЛЕКТРИЧНІ ДАТЧИКИ
9.1. Принцип дії
9.2. Матеріали, застосовувані для термопар
9.3. Вимір температури за допомогою термопар
10. ФОТОЕЛЕКТРИЧНІ ДАТЧИКИ
10.1. Призначення. Типи фотоелектричних датчиків
10.2. Приймачі випромінювання фотоелектричних датчиків
10.3 Застосування фотоелектричних датчиків
11. УЛЬТРАЗВУКОВІ ДАТЧИКИ
11.1 Принцип дії і призначення
11.2. Випромінювачі ультразвукових коливань
11.3. Застосування ультразвукових датчиків
12. СТРУННІ ДАТЧИКИ
12.1. Призначення і принцип дії
12.2. Будова струнних датчиків
13. ДАТЧИКИ ХОЛА І МАГНІТООПОРИ
13.1. Фізичні основи ефекту Хола й ефекту магнітоопору
13.2. Матеріали для датчиків Хола і датчиків магнітоопорів
13.3. Застосування датчиків Хола і датчиків магнітоопору
ЛІТЕРАТУРА
1. Класифікація електричних датчиків
Електричні датчики відносяться до найбільш важливих елементів систем автоматики. За допомогою датчиків контрольована чи регульована величина перетвориться в сигнал, у залежності від зміни якого і протікає весь процес регулювання. Найбільше поширення в автоматиці одержали датчики з електричним вихідним сигналом. Крім електричних поширення одержали механічні, гідравлічні і пневматичні датчики.
Вхідним сигналом датчиків можуть бути усілякі фізичні величини: механічне переміщення, швидкість, сила, температура, тиск, витрата, вологість і ін. У залежності від виду вхідного сигналу розрізняють датчики переміщення, швидкості, сили, температури й ін. Це електричні датчики неелектричних величин.
При автоматизації електромереж і електроустановок виникає необхідність в одержанні сигналів, що відповідають струму, напрузі, потужності й іншим електричним величинам. Для цього використовують датчики струму, напруги, потужності й ін. У них одна електрична величина - вхідний сигнал - перетвориться в іншу електричну величину - вихідний сигнал.
По характері формування електричного вихідного сигналу електричні датчики поділяються на параметричні (пасивні) і генераторні (активні).
У параметричних датчиках зміна вхідного сигналу викликає відповідну зміна якого-небудь параметра електричного кола (активного опору, індуктивності, ємності).
Генераторні датчики є джерелами електричної енергії, що залежить від вхідного сигналу.
Також прийнята класифікація електричних датчиків у залежності від принципу дії чи методу, використовуваного при перетворенні вхідного сигналу в електричний вихідний сигнал.
Відповідно до цим електричні датчики підрозділяють на
- контактні,
- потенціометричні,
- тензометричні,
- електромагнітні,
- п'єзоелектричні,
- ємнісні,
- термоелектричні,
- струнні,
- фотоелектричні,
- ультразвукові
- інші
Треба відзначити, що цей ряд безупинно розширюється - усі нові і нові фізичні явища використовуються для перетворення вхідних сигналів з розвитком науки, техніки, технології, появою нових матеріалів.
По характері зміни вихідного сигналу розрізняють датчики неперервного (аналогового) і дискретного типу.
Незалежно від значення і типу до всіх електричних датчиків пред'являються визначені технічні вимоги. Основними з них є надійність, точність, чутливість, швидкодія, мінімальні габарити, маса.
Датчики розрізняють також по діапазоні зміни вхідного сигналу. Наприклад, одні електричні датчики температури призначені для виміру температури від 0 до 100 °С, а інші - від 0 до 1600 °С. Дуже важливо, щоб діапазон зміни вихідного сигналу був при цьому однаковий (уніфікований) для різних приладів.
Уніфікація вихідних сигналів датчиків дозволяє використовувати загальні підсилювальні і виконавчі елементи для самих різних систем автоматики. У нашій країні така уніфікація проведена шляхом створення Державної системи приладів і засобів автоматизації (ГСП).
Уніфікація елементів і блоків ГСП прискорює процес проектування і виготовлення систем автоматики, підвищує технологічність конструкцій, спрощує комплектацію, монтаж і експлуатацію автоматичних систем.
2. КОНТАКТНІ ДАТЧИКИ
Контактні датчики відносяться до параметричних, оскільки їхній електричний опір змінюється в залежності від вхідної механічної величини. Тому що опір змінюється стрибком (у результаті замикання чи розмикання контактів), то контактні датчики мають дискретний вихідний сигнал. Статична характеристика контактного датчика має релейний характер.
Можна вважати, що вихідний сигнал несе інформацію типу "так-ні" чи "більше-менше". Тому контактні датчики застосовуються в основному в системах автоматичного контролю і сортування розмірів, а також у системах автоматичної сигналізації різних фізичних величин, претворених у переміщення.
Електричні контактні датчики, що використовуються для контролю розмірів деталей, поділяють на граничні, що визначають, чи знаходиться заданий розмір у полі допуску, і амплітудні, що вимірюють відхилення деталі від заданої геометричної форми.
Розглянемо роботу граничного контактного датчика (мал. 1).
Мал 1.Мал 2.
На плиті 1 розміщена деталь 2, точність виконання вертикального розміру якої необхідно контролювати. До деталі підводиться вимірювальний щуп 3 і притискається за допомогою пружини 4. У залежності від розміру деталі щуп переміщається у вертикальному напрямку, повертаючи важіль 5, що несе рухливий контакт 9. При опусканні щупа замикається нерухомий контакт 10, при піднятті - контакт 8. Замикання відбувається в тому випадку, коли розмір деталі має відхилення у більшу чи меншу сторону понад припустимий. Припустимі межі відхилення можуть бути встановлені за допомогою настроювальних гвинтів 7 і 11. Для забезпечення достатнього контактного натискання служить пружина 6. Електричні зажими для підключення рухливого контакту 9 і нерухомих контактів 8 і 10 в електричний ланцюг на даній кінематичній схемі не показані.
Амплітудний датчик (мал. 2) відрізняється від граничного тим, що рухливий контакт 9 має осьове переміщення в напрямних важеля 5. При обертанні деталі 2 у призмі 1 спочатку відбувається замикання рухливого контакту 9 з нерухомим контактом 8. Якщо щуп 3 продовжує підніматися, то важіль переміщається вліво, прослизаючи через рухливий контакт 9. Потім, коли максимальний розмір буде пройдений (тобто щуп почне опускатися), важіль переміститься вправо, захоплюючи за собою без прослизання рухливий контакт. Якщо відхилення розміру перевищує припустиме, то рухливий контакт замкнеться з другим нерухомим контактом 10 і в електричне коло подається сигнал про те, що деталь бракована. На граничне відхилення розміру датчик налаштовують за допомогою гвинта 11, використовуючи еталонну деталь.
Контактні датчики використовують у сортувальних автоматах, що розділяє деталі по розмірах з досить високою точністю (кілька мікрометрів). Продуктивність сортувальних автоматів досягає декількох сотень деталей у хвилину.
Це висуває високі вимоги до надійності і точності контактних датчиків. Технічні показники датчиків у значній мірі залежать від матеріалу і якості виготовлення контактних пар. Порушення контакту приводить до відмовлення датчика, а обгорання і знос контактів знижують точність контролю розмірів.
Навантаженням контактних датчиків досить часто є сигнальні лампи. Матеріали для контактів вибираються в залежності від контактного тиску й умов роботи датчика. Для високочутливих малопотужних контактних датчиків тиск на контактах змінюється від 0,001 до 0,02 Н. Контакти таких датчиків виконують з дорогоцінних металів (платина, золото і їхні сплави), що майже не окисляються в нормальних атмосферних умовах. При контактних тисках 0,05-1 Н застосовують срібні контакти. Для могутніх контактних датчиків контактні зусилля складають трохи Ньютона, а як матеріал контактів використовують вольфрам, молібден і їхні сплави, що володіють високими твердістю і износоустойчивостью.
Перевагами контактних датчиків є простота і дешевина конструкції, простота регулювання чутливості, висока точність, можливість роботи в колах постійного і змінного струмів. До недоліків відносяться труднощі забезпечення високої надійності через наявність електричної дуги й іскріння, можливість помилкових спрацьовувань при наявності вібрацій і ударного навантаження.
3. ПОТЕНЦІОМЕТРИЧНІ ДАТЧИКИ
3.1. Призначення. Принцип дії.
Потенціометричні датчики призначені для перетворення механічного переміщення в електричний сигнал. Основною частиною датчика є реостат, опір якого змінюється при переміщенні движка, що ковзає по провіднику (схема включення потенциометрического датчика показана на мал. 1.
Мал 3. Мал 4.
Напруга живлення подається на всю обмотку реостата через нерухомі виводи цієї обмотки. Вихідна напруга, пропорційна переміщенню движка, знімається з одного з нерухомих виводів і з рухомого движка. Така схема включення в електротехніці називається потенціометричною чи схемою дільника напруги.
Якщо опір всієї обмотки датчика позначити через R, а опір частини цієї обмотки, з якої знімається вихідна напруга, через Rвих, то потенціометрична схема включення датчика може бути представлена як послідовне з'єднання резисторів з опором Rвих і (R - Rвих) (мал.4).
Струм через обмотку датчика І = U/R, а прикладена напруга розподіляється (поділяється) між послідовно з'єднаними резисторами:
Якщо опір обмотки рівномірно розподілити по довжині L, а переміщення движка позначити через Х, то вихідна напруга датчика
Таким чином, вихідний сигнал датчика пропорційний переміщенню движка.
В автоматичних системах движок може бути механічно зв'язаний з яким-небудь пристроєм (клапаном, кермом, антеною, різальним інструментом і т.п. ), положення якого треба вимірити і передати у виді електричного сигналу. Зусилля, під дією якого переміщається движок, у цьому випадку дуже велике. Тому для забезпечення надійного контакту між движком і обмоткою варто мати досить велику силу притиснення движка.
В автоматичних приладах для виміру різних неелектричних величин движок датчика з'єднується з чуттєвим елементом, що перетворить контрольовану величину в переміщення. Зусилля, що розвивається чуттєвими елементами (мембранами, біметалічними пластинами, поплавцями і т.п. ), невелике. Тому не можна сильно притискати движок до обмотки.
Наявність ковзного контакту знижує надійність потенціометричного датчика і є його основним недоліком. Для живлення датчика може бути використана як напруга постійного струму, так і напруга перемінного струму невисокої частоти.
Вхідним сигналом датчика може бути не тільки лінійне, але і кутове переміщення.
У залежності від закону зміни опору обмотки розрізняють лінійні і функціональні потенціометричні датчики.
3.2. Конструкції датчиків
Конструктивно потенціометричний датчик (мал. 5) складається з каркаса 1, на який намотана в один шар обмотка 2 з тонкого проводу. По витках обмотки ковзає движок (щітка) 3, що механічно зв'язаний з об'єктом, переміщення якого треба виміряти.
Обмотка виконана з ізольованого проводу, а доріжка, по якій ковзає движок, попередньо очищений від ізоляції.
мал 5.
Каркас виконаний звичайно плоским чи у виді циліндра. Матеріалом каркаса може бути ізолятор (текстоліт, гетинакс, пластмаса, кераміка) чи метал, покритий шаром ізоляції. Металеві каркаси завдяки кращій теплопровідності дозволяють одержати більшу потужність електричного сигналу на виході датчика. Як матеріал датчика для такого каркаса може бути нанесений шар оксидованого алюмінію товщиною близько 10 мкм.
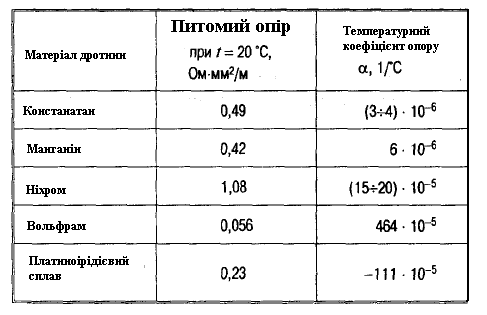
Для обмотки потенціометричного датчика найчастіше застосовують провід з манганіну, константану й інших провідних матеріалів, що мають малий температурний коефіцієнт опору. При великих зусиллях притиснення движка використовують провід діаметром 0,1-0,3 мм, при малих зусиллях притиснення провід зі сплавів, до складу яких входять платина, срібло, і рубідій, осмій і ін. Діаметр проводу d таких точних датчиків вибирається в межах 0,03-0,01 мм.
Провід намотується на каркас з деяким натягом. Товщину каркаса не рекомендується брати менше 4d, а радіус заокруглення на кутах каркаса - менш 2d.
Ширина доріжки складає звичайно (23)d.
При d =0,10,3 мм движок потенціометричного датчика виконується у виді пластинчастих щіток зі срібла, срібла з палладієм чи (рідше) фосфористої бронзи. Контактне зусилля при цьому приймається рівним 0,05-0,1 Н, що забезпечує силу тертя не більш 3·10-2 Н. Для точних датчиків при d < 0,1 мм движок робиться зі сплавів платины з іридієм, бериллием чи сріблом у виді двох-п'яти тонких рівнобіжних дротів. Контактне зусилля при цьому приймається рівним 10-3 10-2 Н, тобто іноді воно досягає 20 мг на окремий контакт. Настільки малі контактні зусилля необхідні для високоточних потенціометричних датчиків, використовуваних, наприклад, у відповідальних космічних об'єктах.
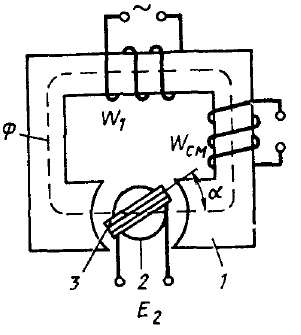
На мал. 6. приведена конструкція потенціометричного датчика для виміру кутових переміщень.
Мал 6. Мал 7.
Так само як і датчик лінійних переміщень, він складається з каркаса 1 з обмоткою 2, по якій ковзає движок 3. Для знімання сигналу з движка, що переміщається, служить додаткова щітка 4, що ковзає по струмознімальному кільцю 5. Вихідна напруга датчика кутових переміщень пропорційна куту повороту рухливої частини первинного вимірювача, з'єднаного з віссю движка.
У деяких автоматичних приладах у якості потенціометричного датчика використовують так називаний реохорд (мал.7).
Він являє собою натягнутий дріт, по якому ковзає повзунок. Опір реохорда пропорційно переміщенню повзунка.
3.3. Характеристики лінійного потенціометричного датчика
Основною характеристикою потенціометричного датчика є залежність вихідної напруги Uвих від переміщення х. При рівномірному намотуванні ця залежність лінійна тільки на холостому ході, тобто при відсутності опору навантаження, підключеного до вихідних затисків датчика. У реальних умовах до цих затисків підключаються електричні прилади, вхідний опір яких є опором навантаження для датчика.
Для аналізу впливу опору навантаження RH на основну характеристику датчика, повний опір обмотки якого R, уведемо поняття коефіцієнта навантаження = Rн/R і = х/l. Вихіда напруга датчика
По цьому рівнянню побудуємо залежність
де U - напруга живлення датчика, для різних значень (мал. 8).
 мал 8.
мал 8.
Зі зменшенням опору навантаження характеристика датчика стає нелінійною і зростає помилка перетворення.
Відношення переміщення движка х до довжини намотування l позначаємо =х/l. Якщо датчик не навантажений тобто опір навантаження RH = і = , то вихідна напруга лінійно зростає при зміні від 0 до 1. Графічно ця залежність зображується прямою лінією. При наявності опору навантаження RH, порівнянного з опором обмотки R, ця залежність відрізняється від лінійної, оскільки частина струму, що проходить через датчик, відгалужується в навантаження.
Важливою характеристикою якості потенциометрического датчика є плавність зміни вихідної напруги. При переміщенні движка по обмотці потенціометра відбувається стрибкоподібна зміна опору, оскільки движок як би перескакує з одного витка на іншій. Це приводить до того, що залежність вихідної напруги від переміщення має східчастий вид (мал. 9).
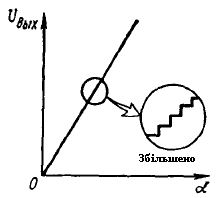 мал 9.
мал 9.
3.4. Реверсивні потенциометрические датчики
Вихідна напруга реверсивних датчиків змінює знак (полярність) при зміні знака вхідного сигналу. У системах автоматичного регулювання звичайно вимагаються саме реверсивні (чи двотактні) датчики.
Мал 10. Мал 11.
Схеми реверсивних потенциометрических датчиків показані на мал.10.
У схемі на мал. 10, використовується потенціометр із нерухомим виводом від середньої точки намотування. Вихідна напруга знімається з движка і середньої точки. При переході движка через середню точку вихідна напруга змінює свій знак: при живленні змінним струмом фаза змінюється на 180°, а постійним струмом - полярність змінюється на протилежну.
У слідкуючих системах, широко використовується мостова схема включення потенциометрических датчиків, показана на мал.11.
Потенціометр П1 зв'язаний із вхідною віссю слідкуючої системи, і є що задаючим. Потенціометр П2 має механічний зв'язок з виконавчим пристроєм. Вихідна напруга (чи струм навантаження) визначається різницею в положенні движків потенціометрів П1 і П2, тобто відповідає сигналу помилки слідкуючої системи. Знак сигналу помилки залежить від того, більший чи менший кут повороту виконавчого вала в порівнянні з кутом повороту вхідного вала.
3.5. Функціональні потенціометричні датчики
Для одержання вихідного сигналу, що змінюється по визначеному законі, застосовують функціональні потенціометричні датчики. У цих датчиках залежність опору обмотки від переміщення движка є нелінійної. Необхідна нелінійність забезпечується різними способами: зміною профілю каркаса (мал. 12); зміною матеріалу чи розміру проводу; зміною кроку намотування чи довжини витка (мал. 13).
Функціональні потенціометричні датчики знайшли застосування в автоматичних обчислювальних системах. Наприклад, в автоматичних навігаційних системах літаків і кораблів використовуються електромеханічні лічильно-вирішальні пристрої, що виконують операції множення швидкості на синус чи косинус курсового кута.
За допомогою функціональних датчиків може бути скомпенсована вихідна нелінійність первинного чуттєвого елемента. Наприклад, у баці складного профілю рівень пального не зв'язаний лінійно з обємом. За допомогою функціонального датчика можна забезпечити лінійну залежність між вихідним сигналом датчика і кількістю пального в баці.
Найчастіше одержання необхідної функціональної залежності забезпечується підбором визначеного профілю каркаса потенціометра.
Мал. 12 Мал. 13
4. ТЕНЗОДАТЧИКИ
4.1 Призначення. Типи тензодатчиків
Тензометричні датчики служать для виміру деформацій і механічних напруг у деталях машин і механізмів. Вони можуть також використовуватися для виміру інших механічних величин (тиску, вібрації, прискорення й ін.), що попередньо перетворяться в деформацію.
Робота тензодатчиков заснована на зміні активного опору матеріалу при його механічній деформації. Як матеріал тензодатчиков використовуються провідники (у виді дроту, фольги чи плівки) і напівпровідники. Тензодатчики відносяться до параметричних датчиків, оскільки у них вихідний сигнал формується за рахунок зміни активного опору. Тому їх називають ще тензорезисторами.
4.2 Принцип дії дротових тензодатчиків
Принцип роботи дротового тензодатчика заснований на зміні активного опору дроту при її деформації. Зміна активного опору дроту відбувається по двох причинах: по-перше, змінюються геометричні розміри дроту (довжина l, перетин s);
по-друге, при деформації змінюється питомий опір матеріалу дроту.
А ці величини і визначають активний опір дроту:
R = l/s
Розглянемо (мал. 14) провід довжиною l, радіусом r, перетином s = r2 і об’ємом V= r2 l ,що при деформації (розтяганні) під впливом сили F одержує подовження dl і зменшення радіуса dr.
мал 14.
Отже, новий об’єм дроту
Нехтуючи нескінченно малими вищих порядків (виду (dr)2,drdl), одержимо
Звідки збільшення об’єму
Перетворимо рівняння, помноживши і поділивши від'ємник на r·dl і замінивши r2 на s:
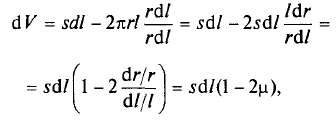
де - коефіцієнт Пуассона, що характеризує зміну розмірів дроту при розтяганні; для металів = 0,240,5.
Якби матеріал не змінював об’єм при розтяганні, то dV=0 і = 0,5.
Таким чином, реальні метали змінюють свій об’єм, a отже, вони перетерплюють і внутрішньоструктурні зміни: очевидно міняється щільність матеріалу і його питомий опір.
Варто мати на увазі, що деформація не є єдиною причиною зміни опору тензодатчика. Опір міняється і в залежності від температури. Це явище використовується в термоопорах. Очевидно, для зменшення температурної погрішності тензодатчика його матеріал повинний мати високу чутливість S при малому температурному коефіцієнті розширення і малому значенні термо-э.р.с при контакті з мідними сполучними проводами.
В таблиці приведені деякі матеріали для виготовлення тензодатчиків.
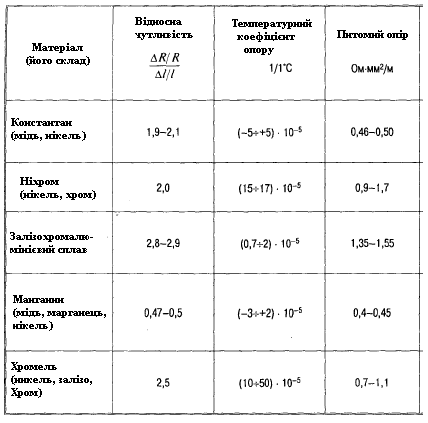
Тензочутливість напівпровідників у багато разів більше тензочутливості металів.
4.3. Будова дротових тензодатчиків
Будова найбільш розповсюдженого дротового тензодатчика показаний на мал. 15. На смугу тонкого міцного папера наклеєний покладений зигзагоподібно тонкий дріт.
Мал. 15.
До кінців дроту за допомогою пайки чи зварювання приєднані виводи з мідної фольги, за допомогою яких датчик підключений у вимірювальне коло. Зверху дріт також захищений від зовнішніх впливів тонким папером.
Тензодатчик приклеюють до випробуваної деталі, завдяки чому деформацію деталі сприймають дротові ґрати. Довжина деталі, займана дротом, називається вимірювальною базою датчика L.
Для того щоб одержати найбільшу зміну опору датчика, його треба розташувати в напрямку дії деформуючого зусилля (зтиску чи розтягання), тобто напрямок вимірювальної бази повинний збігатися з віссю, по якій спрямоване зусилля. Якщо ж напрямок бази і зусилля взаємно перпендикулярні, то деформація і зміна опору дуже малі.
Якщо розташувати кілька датчиків під кутом один до одного, то можна визначити не тільки величину деформації, але і напрямок прикладених до деталі зусиль.
При виборі вимірювальної схеми для тензодатчиков необхідно враховувати дві обставини. По-перше, дротові тензодатчики мають малі відносні зміни опору. Для збільшення чутливості застосовують мостові схеми з двома чи чотирма однаковими датчиками, що наклеюються на випробувану деталь таким чином, що датчик, включений в одне плече моста, працює на стиск, а датчик, включений у суміжне плече моста, працює на розтягання. По-друге, необхідно приймати міри для компенсації температурної погрішності.
Мостова схема включення тензодатчиків з компенсацією температурної погрішності показана на мал. 16,а. На мал. 16,б показана мостова схема включення тензодатчиків підвищеної чутливості, а на мал. 3,в показані місця кріплення тензодатчиков.
Мал. 16.
4.4. Фольгові, плівкові, вугільні і напівпровідникові тензодатчики
Фольгові тензодатчики виготовляють методом фотохімічного травлення. Ґрати такого датчика виконуються з різних сплавів (мідь з нікелем, срібло з золотом і ін.), що забезпечують достатню чутливість і в той же час мають надійне зчеплення (адгезію) з ізоляційною основою, на якій виконується датчик.
Плівкові тензодатчики виготовляють шляхом напилювання шарів германія, телуру, вісмуту чи сульфіду свинцю на еластичну ізоляційну підставку з слюди чи кварцу.
На відміну від дротових, фольгові і плівкові тензодатчики мають ґрати не круглого, а прямокутного перетину з дуже великим відношенням ширини до висоти.
У порівнянні з дротовими вони мають ряд переваг. Завдяки великій площі зіткнення струмопровідних смужок датчика з деталлю забезпечуються гарні умови тепловіддачі. Це дозволяє в кілька разів підвищити щільність струму фольгових датчиків і в десятки разів - щільність струму плівкових датчиків (до 103 А/мм2).
Завдяки великому відношенню периметра перетину плоскої смуги до площі її перетину поліпшується сприйнятливість до деформації і точність її виміру. Чутливість плівкових датчиків досягає 50. Завдяки збільшеному перетину кінців фольгових і плівкових ґрат збільшується надійність пайки (чи приварювання) виводів датчика.
Фольгові датчики мають товщину провідного покриття 3-15 мкм. Опір фольгових датчиків знаходиться в межах від 30 до 300 Ом. Фотохімічний спосіб дозволяє виконати будь-який малюнок ґрат, що також є перевагою фольгових датчиків. На мал. 17 показані різні типи фольгових тензодатчиків:
а) - призначений для виміру лінійних переміщень;
б) - розетка з двох датчиків, що дозволяє вимірювати деформації в двох взаємно перпендикулярних напрямках;
в) - датчик, призначений для наклеювання на мембрану і вимірів тиску.
Мал. 17.
Для виміру механічних зусиль і напруг використовуються і вугільні датчики. Їхня робота заснована на залежності активного опору вугільних (чи графітових) контактів від сили контактного стиску.
Будова вугільного датчика показана на мал. 18.
мал. 18.
Вугільні диски 3 зажимаются між притискним гвинтом 6 і упором 5, що сприймає вимірюване зусилля F. Тиск на вугільні диски 3 передається через металеві диски 1, ізоляційні прокладки 4 і мідні прокладки 2, що мають виводи для включення датчика у вимірювальну схему.
Для виміру пружних деформацій використовуються вугільні датчики тензолітового типу. Виготовляються вони з вугільного (графітового) порошку чи сажі, змішаної з ізолюючим лаком (бакеліт чи шелак). Така маса називається тензолітом.
Виконуються вугільні тензометричні датчики (мал.19) у виді стрижнів 1 діаметром близько 1 мм із мідними виводами. На контрольовану деталь наклеюють смужку ізоляційного паперу 2, а до паперу приклеюють стрижень. При деформації деталі стрижень також деформується. Відбувається зміна щільності контакту, між частками вугілля, і, отже, опір датчика змінюється: при стисненні - зменшується, при розтяганні- збільшується.
мал. 19
У напівпровідникових тензодатчиках використовуються кристалічні напівпровідникові матеріали. Принцип дії їх такої ж, як і в дротових тензодатчиків: зміна активного опору через механічну деформацію самого провідника і зміни питомого опору. Але якщо в металевих провідниках головним є зміна розмірів (коефіцієнт у рівнянні) то в металевих напівпровідниках головним є зміна питомого опору.
Найбільш помітний тензоефект у таких напівпровідниках, як германій Ge, кремній Sі, з'єднання індію Іn, галію Ga. Чутливість напівпровідникового тензодатчика залежить від орієнтування дії сил (кристалографічного напрямку). Впливають на чутливість також наявність домішок і температура.
Найбільше поширення одержали германієві і кремнієві тензодатчики, причому останні здатні працювати при високих температурах (до 540 °С) і великих механічних навантаженнях.
5. П'ЄЗОЕЛЕКТРИЧНІ ДАТЧИКИ
5.1 Принцип дії
Робота п'єзоелектричного датчика заснована на фізичному явищі, що називається п'єзоелектричним ефектом. Цей ефект виявляється в деяких кристалах у виді появи на їхніх гранях електричних зарядів різних знаків при стиску кристала у визначеному напрямку.
Слово "п’єзо" по-грецьки означає "давлю". У залежності від значення сили стиску (чи розтягання) міняється кількість зарядів, а отже, і різниця потенціалів, заміряна між гранями. П'єзоелектричні датчики відносяться до генераторного типу.
Широко відомі п'єзоелектричні звукознімачі: голка звукознімача сприймає всі зміни глибини звукової доріжки і передає їх на п’єзокристал. Вихідна напруга з п’єзокристалла підсилюється, і через динамік ми чуємо записані звуки.
Поява зарядів на гранях у залежності від стиску називається прямим п’єзоефектом. Існує і зворотний п’єзоефект: при подачі напруги на грані кристала змінюються його розміри (він стискується чи розтискається). Зворотний п’єзоефект (поряд з магнітострикційним) знайшов застосування в ультразвукових генераторах. А засновані на прямому п’єзоефекті п'єзоелектричні датчики використовуються в автоматиці для виміру тисків, вібрацій, прискорень, інших параметрів швидкоплинних процесів.
Розглянемо появу зарядів на гранях кристала кварцу, у якого п'єзоелектричний ефект досить сильно виражений.
На мал. 20 зображений кристал кварцу, що має вид шестигранної призми.
мал. 20.
У кристалі можна виділити три осі симетрії:
Z - подовжня вісь, називана оптичною віссю;
X - поперечна вісь, що проходить через ребра призми перпендикулярно подовжньої осі, називається електричною віссю
Y - поперечна вісь, що проходить через грані призми перпендикулярно їм і осям Z, X, і називається механічною чи нейтральною
Виріжемо із кристала кварцу паралелепіпед таким чином, щоб його грані були перпендикулярні осям X, Y, Z, і розглянемо появу зарядів на його гранях під дією сил, орієнтованих по осях X, Y, Z, тобто нормально до площин граней.
Під дією сили F уздовж електричної осі X на кожній з граней паралелепіпеда, перпендикулярної осі X, з'являються електричні заряди. Величина зарядів не залежить від геометричних розмірів кристала, а визначається силою Fx:
qx = K0Fx
де K0- п'єзоелектрична постійна матеріалу, чи п'єзоелектричний модуль. Знак зарядів (полярність) залежить від напрямку сили по осі Х (сила стиску чи сила розтягання).
Під дією сили розтягання FY уздовж механічної осі Y виникають заряди на тих же гранях, що і при дії сили Fx (тобто на гранях, перпендикулярних осі X), але знак заряду буде той же, що при дії сили стиску Fx. Відповідно сила стиску Fy приводить до появи зарядів на тих же гранях і з тим же знаком, що сила розтягання Fx. Величина зарядів під дією сил FY залежить від геометричних розмірів кристала b і с.
Поява зарядів під впливом сили Fx називається поздовжнім п’єзоефектом, а під впливом сили FY - поперечним п’єзоефектом.
Стиск чи розтягання по осі Z не викликає появи зарядів на гранях. Електричні заряди на гранях п’єзоелемента, що зявляються під дією сил Fx і FY зникають, як тільки припиняється дія сили. Крім того, навіть якщо сила прикладена постійно, заряди стікають через повітря чи ізоляцію.
Тому п'єзоелектричні датчики використовують лише для виміру динамічних процесів, коли під дією перемінних сил заряди на гранях увесь час заповнюються. У п'єзоелектричних датчиках набули застосування крім кварцу сегнетова сіль і титанат барію.
5.2 Матеріали для виготовлення п'єзоелектричних датчиків
П'єзоелектричний модуль кварцу порівняно невисокий. Але його головна перевага - низька вартість. Адже кварц - це один з найпоширеніших мінералів, його склад (SіО2) той же, що й у звичайного піску. Кварц також має велику механічну міцність, гарні ізоляційні властивості, незначну залежність параметрів від температури.
Найбільше яскраво п'єзоелектричний ефект виражений у кристалах сегнетової солі: при одній і тій же силі з'являється в тисячу разів більша кількість електрики, ніж у кварцу. Однак ці заряди досить швидко стікають через малий питомий опір. Властивості сегнетовой солі змінюються в залежності від температури і вологості. Тому п’єзоелементи із сегнетовой солі застосовуються для виміру швидкозмінних сил і тисків при малій вологості і неширокому діапазоні зміни температури навколишнього середовища.
Титанат барію має і велике значення п'єзоелектричного модуля (на два порядки вище, ніж у кварцу), і високу механічну міцність, і незалежність параметрів від зміни вологості. Його недолік - старіння, згодом він утрачає свої властивості (приблизно на 10 % за рік).
5.3. Будова п’єзодатчиків
П'єзоелектричні датчики застосовуються для виміру тиску, сили, прискорення. На мал.21 показаний пристрій п'єзоелектричного датчика тиску з двома кварцовими пластинами. Вимірюваний тиск діє на мембрану 1, що представляє собою дно корпуса датчика. Кварцові пластини 2 затиснуті між металевими прокладками 3. Середня прокладка 3 з'єднана з виводом 4, що проходить через екрановану втулку 5 з ізоляційного матеріалу.
Кришка 6 з'єднується з корпусом і через кульку 7 передає тиск пластинам, завдяки чому вимірюваний тиск розподіляється по поверхні кварцових пластин більш рівномірно. Кварцові пластини звичайно розташовані таким чином, що у вимірювальну схему подається негативний потенціал. Позитивний потенціал подається на корпус датчика. Для зменшення витоку зарядів необхідна дуже якісна ізоляція. З цією же метою поверхня кварцових пластин ретельно полірують. Використання двох (а іноді і більше) пластин підвищує вихідну ЕРС, оскільки вихідні сигнали пластин складаються.
На мал. 22 показаний п'єзоелектричний датчик прискорення, використовуваний у вібровимірювальній апаратурі.
мал. 21.мал. 22.
П’єзоелемент 1 з титанату барію розташований у корпусі приладу 2 між інерційною масою 3 і підп'ятником 4. Для збільшення сили, що діє на п’єзоелемент при прискореннях, інерційна маса має відносно великі розміри і виготовлена з вольфраму. Пакет з інерційної маси 3, п’єзоелемента 1 і підп'ятники 4 притиснутий до підстави корпуса гайкою 5 через сферичну п'яту 6, ізоляційну прокладку, пружинну шайбу і контактну пластину. Вивід сигналу виконаний за допомогою спеціального антивібраційного кабелю.
Датчик вимірює прискорення від 0,2 до 200 g. Коефіцієнт перетворення порядку 8 мВ на 1 g. Мінімальний час віброприскорення 5 Гц.
6. ЕЛЕКТРОМАГНІТНІ ДАТЧИКИ
6.1 Призначення. Типи електромагнітних датчиків
Електромагнітні датчики призначені для перетворення переміщення в електричний сигнал за рахунок зміни параметрів електромагнітного кола. Ці зміни можуть полягати, наприклад, у збільшенні чи зменшенні магнітного опору магнітного кола датчика при переміщенні сердечника. Якщо переміщається не сердечник, а обмотка, то відбувається зміна потокозчеплення обмотки. Таким чином, зміни в електромагнітному колі датчика можуть бути викликані як переміщенням елемента магнітного кола (сердечника чи якоря), так і переміщенням елемента електричного кола (обмотки). У результаті таких переміщень змінюється індуктивність обмотки L чи її взаємоіндуктивність М з обмоткою збудження. Тому в технічній літературі електромагнітні датчики часто називають індуктивними.
Електромагнітні датчики звичайно розглядають як параметричні, оскільки величини L і М залежать від переміщення х
L=f(x), M=f(x)
Але електромагнітні датчики з що змінюється взаємоіндуктивністю можна віднестиі до генераторного типу, оскільки в результаті змінюється і ЕРС обмотки, тобто
E=f(x)
Тому що ЕРС у вихідній обмотці з'являється за рахунок зміни коефіцієнта взаємоіндукції з обмоткою збудження, то такі електромагнітні датчики називають трансформаторними. Адже обмотку збудження можна розглядати як первинну обмотку трансформатора, а вихідну обмотку - як вторинну.
До генераторного відносяться й індукційні датчики, в обмотках яких генерується ЕРС у залежності від швидкості переміщення.
За допомогою електромагнітних датчиків можна автоматично вимірювати механічні сили, тиск, температуру, властивості магнітних матеріалів, визначати внутрішні порожнини і тріщини у деталях (дефектоскопія), товщину немагнітних покрить на сталі, витрату рідин і газів у трубопроводах і ін.
Електромагнітні датчики мають наступні переваги: простота і дешевина конструкції, механічна міцність, висока надійність за рахунок можливості знімання вихідного сигналу без ковзних контактів, можливість живлення від промислової мережі частотою 50 Гц, можливість одержання досить високої потужності вихідного сигналу, можливість роботи як у діапазоні малих (частки мм), так і великих (метри) переміщень.
До недоліків електромагнітних датчиків варто віднести вплив на вихідний сигнал зовнішніх електромагнітних полів і частоти живильної напруги, а також можливість роботи тільки на змінному струмі (живлення постійним струмом можливо лише для індукційних датчиків).
Зміна індуктивності і взаємоіндуктивності може відбуватися і під впливом механічних напруг у сердечнику електромагнітного датчика. Такі напруги приводять до зміни магнітної проникності феромагнітного матеріалу сердечника.
Електромагнітні датчики, засновані на такому фізичному явищі, називаються магнітопружними датчиками.
Електромагнітні датчики (індуктивні, трансформаторні, індукційні, магнітопружні) одержали широке поширення в системах автоматики.
6.2. Принцип дії індуктивних датчиків
Найпростіший індуктивний датчик являє собою дросель з перемінним повітряним зазором в магнітопроводі. На мал. 23 показані дві найбільш розповсюджені конструктивні схеми індуктивних датчиків на одному сердечнику. Це одинарні індуктивні датчики. На сердечнику 1 з електротехнічної сталі розміщена обмотка 2, що підключається до джерела перемінної напруги. Магнітний потік у сердечнику замикається через якір 3, що може переміщатися щодо сердечника 1.
Якір 3 механічно зв'язаний з деталлю, переміщення якої необхідно вимірити. Ця деталь на малюнку не показана, але переміщення х її може відбуватися у вертикальному (мал. 23, а) чи в горизонтальному напрямку (мал. 23, б). Переміщення якоря змінює магнітний опір магнітного ланцюга, що складає із сердечника, якоря і повітряного зазору 5. Отже, зміниться індуктивність обмотки 2. Оскільки ця обмотка включена на перемінну напругу, струм в обмотці 2 буде визначатися її повним опором, у которое входить і індуктивний опір.
мал. 23.
Зі збільшенням повітряного зазору магнітний опір збільшується, а індуктивність, індуктивний і повний опори зменшуються. Отже, струм в обмотці збільшується. Приймаючи струм І в обмотці за вихідний сигнал датчика, а переміщення х - за вхідний сигнал, маємо вихідну статичну характеристику у виді графіка І=f(х).
Знайдемо вираз, що визначає залежність струму в обмотці датчика від переміщення. Аналіз проведемо стосовно до конструктивної схеми, показаної на мал. 23, а. У цьому випадку збільшення переміщення х завжди дорівнює збільшенню зазору 5, тому нам необхідно одержати математичну залежність струму І від зазору
Нехай обмотка датчика включена на деяку напругу живлення.
За законом Ома, діюче значення струму в обмотці
І=U/z,
де z - повний опір обмотки датчика (Ом), що складає з активного R і індуктивного XL опорів: .
Індуктивний опір XL пропорційно індуктивності L і частоті живлення f. Індуктивність обмотки датчика з числом витків
де Ф - магнітний потік сердечника (Вб). Приймаємо, що весь магнітний потік проходить через повітряний зазор, тобто потоки розсіювання відсутні. Тоді
Тут RM - магнітний опір магнитопровода датчика, Гн-1. Цей опір складається з опору стали сердечника і якоря Rст і опору повітряного зазору Rп:
Опір повітряного зазору пропорційний подвоєній довжині повітряного зазору , оскільки магнітний потік проходить через повітряний зазор двічі.
Аналіз формул показує, що зі збільшенням повітряного зазору (а отже, і переміщення) повний опір зменшується, прагнучи до величини активного опору обмотки R. Залежність повного опору z від величини зазору показана на мал. 24, а.
Якщо вхідним сигналом датчика вважати переміщення якоря х від початкового положення при = 0 убік збільшення зазору (по мал. 23, а), то формула після заміни на х являє собою статичну характеристику одинарного індуктивного датчика. Графік статичної характеристики показаний на мал. 24, б.
мал. 2.
Як видно з аналізу формул і графіка, залежність І=f(x) має нелінійний характер. Однак на графіку можна виділити ділянка АБ, на якому дотримується пряма пропорційність між вхідним і вихідним сигналами. Ця ділянка називається робочою, датчик використовується саме в діапазоні вхідних сигналів від ха до хб. Отже, датчик завжди має деякий повітряний зазор, не менший ха. У більшості конструкцій індуктивних датчиків магнитопровід ненасичений і магнітна проникність матеріалу сердечника дуже велика. Тому магнітний опір повітряного зазору (уже при = ха) значно більше магнітного опору сталевого сердечника.
Крім наявності електромагнітної сили притягання індуктивні датчики мають також і інші серйозні недоліки: при зміні знака вхідного сигналу не міняється знак вихідного сигналу (тобто датчик не є реверсивним); діапазон зміни вхідного сигналу, при якому зберігається лінійність статичної характеристики, невеликий.
Зазначені недоліки обмежують область застосування одинарних індуктивних датчиків. На практиці вони знайшли застосування як безконтактні датчики положення і кінцевих вимикачів при керуванні механізмами, що мають значні зусилля. У таких схемах автоматики найбільше повно виявляються переваги одинарних індуктивних датчиків: простота конструкції і висока надійність.
6.3. Диференціальні (реверсивні) індуктивні датчики
Диференціальні індуктивні датчики являють собою сукупність двох одинарних (нереверсивних) датчиків із загальним якорем. Призначено диференціальні індуктивні датчики для одержання реверсивної статичної характеристики і для компенсації електромагнітної сили притягання якоря.
Розглянемо роботу диференціального індуктивного датчика (мал. 25,а), що складається з двох однакових сердечників 1 і 2 з обмотками і розташованого між сердечниками якоря 3, здатного переміщатися вліво і вправо щодо середнього симетричного положення.
мал. 25.
Живлення диференціального датчика здійснюється від трансформатора з виводом від середньої точки вторинної обмотки. Опір навантаження RH включається між цією середньою точкою і загальною точкою обмоток сердечників 7 і 2. Струм в опорі навантаження можна представити як алгебраїчну суму двох струмів: у лівому і правому контурах. Кожен контур складається з половини вторинної обмотки трансформатора, одинарного індуктивного датчика й опору навантаження RH, загального для обох контурів.
Розглянемо напрямок контурних струмів у момент часу, коли у вторинній обмотці трансформатора індукується умовно додатній напівперіод напруги: плюс - у лівого затиску; мінус - у правого. Полярність середньої точки щодо лівого затиску буде мінусова, а щодо правого - плюсова.
Приймаючи за додатній напрямок струму в зовнішньому колі від плюса до мінуса, визначаємо, що струм лівого контуру І1, спрямований зверху вниз, а струм правого контуру І2 - знизу нагору.
Отже, ці струми віднімаються, а через навантаження піде різницевий струм. У наступний напівперіод полярність зміниться на протилежну (на мал. 25 показана в дужках). Відповідно зміниться напрямок струмів у навантаженні, але знову струм у навантаженні буде дорівнює різниці струмів І1, і І2 (напрямок їхній показаний пунктиром). При середньому (симетричному) положенні якоря 3 індуктивності обмоток 1 і 2 однакові. Отже, струми І1, і І2 рівні, різниця їхній дорівнює нулю, вихідний сигнал (струм в опорі навантаження) дорівнює нулю.
При переміщенні якоря вправо (приймемо його за позитивний вхідний сигнал) індуктивність L2 зростає, оскільки повітряний зазор в одинарному індуктивному датчику 2 зменшується, а індуктивність L1 зменшується, оскільки зазор у датчику 1 збільшується.
Отже, І1, > І2 і з'являється вихідний сигнал у виді струму навантаження визначеної полярності. При переміщенні якоря вліво (негативний вхідний сигнал) відповідно зменшується L2 і збільшується, співвідношення струмів І1< І2 і полярність струму навантаження змінюється. Таким чином, статична характеристика диференціального датчика (мал. 25, б) буде реверсивна, залежна від знака вхідного сигналу. А диференціальним датчик називається тому, що вихідний сигнал формується як різниця сигналів двох однакових датчиків.
Сили притягання якоря до сердечників виникають і в цьому випадку, але спрямовані вони в протилежні сторони і тому майже цілком взаємно компенсуються. Тому для переміщення якоря потрібно незначне зусилля. Дуже важливою особливістю диференціального датчика є рівність нулю вихідного сигналу при нульовому вхідному сигналі. Нагадаємо, що в одинарному датчику вихідний сигнал (струм через обмотку) був не дорівнює нулю навіть при нульовому повітряному зазорі.
6.4. Плунжерні датчики
Для виміру великих переміщень застосовують індуктивні датчики у виді котушки з рухливим внутрішнім сердечником.
Якщо сердечник цілком введений усередині котушки, на яку намотана обмотка, то її індуктивний опір максимально, а струм в обмотці має мінімальне значення. При виході сердечника з котушки індуктивний опір зменшується, а струм відповідно збільшується. Індуктивні датчики у виді котушки із сердечником, що переміщається усередині неї, одержали назва плунжерних датчиків. Їх також називають індуктивними датчиками з розімкнутим магнитопроводом, оскільки навіть при максимальній індуктивності обмотки основний шлях магнітного потоку проходить по повітрю. З цього погляду розглянуті вище датчики з обмоткою на нерухомому сердечнику і з якорем, що переміщається, називають індуктивними датчиками з замкнутим магнітопроводом.
У плунжерних датчиків є одна дуже важлива особливість: вони дозволяють одержати інформацію про переміщення з замкнутого, ізольованого простору. Нехай, наприклад, треба вимірити рівень якої-небудь дуже шкідливої рідини, пари якої отрутні, і знаходяться під великим тиском. Тоді котушку 7 плунжерного датчика (мал. 26) надягають на розділювальну трубку 3 з нержавіючої немагнітної сталі, усередині якої і переміщається сердечник 2 з феромагнітного матеріалу. Переміщення сердечника змінює індуктивність котушки, а розділова трубка не екранує магнітне поле, оскільки матеріал трубки має дуже малу магнітну проникність. Таким чином, обмотка датчика, всі інші електричні елементи вимірювальної схеми розміщені в звичайних, нормальних умовах.
мал. 26.
У зв'язку з цим про плунжерні датчики говорять, що вони дозволяють вивести переміщення з замкнутого обсягу. У цьому основна перевага плунжерних датчиків перед датчиками з замкнутим магнітопроводом. А от по чутливості, потужності вихідного сигналу плунжерні датчики уступають індуктивним датчикам із замкнутим магнітопроводом.
6.5. Трансформаторні датчики
Принцип дії трансформаторних датчиків заснований на зміні коефіцієнта взаємоіндукції обмоток при переміщенні якоря. Вони відносяться до електромагнітних датчиків генераторного типу. Магнітні системи трансформаторних датчиків такі ж, як і в розглянутих у індуктивних датчиків.
Відмінність полягає лише в тім, що додається ще обмотка, з якої і знімається вихідний сигнал. Завдяки цьому в трансформаторних датчиках відсутній безпосередній електричний зв'язок між колом живлення і вимірювальним колом. Існує зв'язок лише за рахунок магнітного поля (трансформаторний зв'язок), що дозволяє вибором числа витків вихідної обмотки одержати будь-як рівень вихідної напруги.
На мал. 27 показаний трансформаторний датчик з рухливим якорем. Обмотка збудження 1, живиться напругою U1, що створює в магнітопроводі перемінний магнітний потік Ф. У вторинній обмотці 2 индукується ЕРС Е2, значення якої залежить від величини повітряного зазору . Максимальна ЕРС Е2 виходить при = 0, оскільки при цьому магнітний опір замкнутого магнітопровода мінімальний і по ньому проходить максимальний магнітний потік Ф. Зі збільшенням зменшуються магнітний потік і відповідна йому ЕРС Е2.
мал. 27.
Такий датчик використовується для виміру малих лінійних переміщень, але має серйозний недолік: залежність ЕРС Е2 від переміщення якоря х нелінійна і не проходить через нуль.
На мал. 28 показаний трансформаторний датчик з поворотною обмоткою. Магнітопровод датчика нерухомий і складається з ярма 1 і сердечника 2. Обмотка збудження 1, розміщена на ярмі 1, живиться перемінною напругою U1, і створює в зазорі між ярмом 1 і сердечником 2 перемінний магнітний потік Ф, амплітудне значення якого незмінно.
 мал. 28.
мал. 28.
У зазорі з рівномірним розподілом індукції розміщена поворотна рамка 3 із вторинною обмоткою 2, у якій індукується ЕРС Е2, що є вихідним сигналом датчика.
У залежності від кута повороту , Е2 змінюється від нуля (при = 0 площина рамки розміщена уздовж напрямку магнітного потоку) до максимального значення (при = 90° площина рамки розміщена поперек напрямку магнітного потоку, весь магнітний потік зчеплений з витками вторинної обмотки 2).
При зміні знака кута повороту а фаза ЕРС Е2 змінюється на 180°, тобто датчик є реверсивним.
Такі датчики одержали поширення для дистанційних передач показань різних приладів за назвою феродинамічних перетворювачів. Недоліком феродинамічних перетворювачів є залежність вихідного сигналу від коливань напруги і частоти живлення.
Трансформаторні датчики з вхідним сигналом у виді кутового переміщення часто виконують у виді електричних мікромашин, відомих за назвою "обертові трансформатори" (ОТ).
На мал 29 показаний диференціальний трансформаторний датчик плунжерного типу.
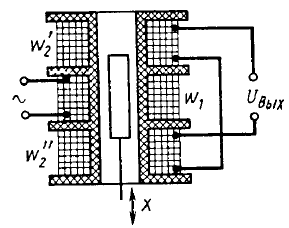 мал. 29.
мал. 29.
Для дистанційних передач кутових переміщень широко застосовуються також електромашинні елементи автоматики - сельсини. Вони мають однофазну обмотку на статорі і трифазну обмотку синхронізації на роторі (можливо і зворотне розташування обмоток).
Сельсини можуть працювати в індикаторному і трансформаторному режимах. На передавальній стороні встановлюється сельсин-датчик, а на приймальній - сельсин-приймач, що повинен автоматично повторювати кут повороту сельсина-датчика.
Під дією різниці ЕРС по проводах лінії зв'язку між обмотками синхронізації підуть деякі струми, завдяки чому у сельсині-приймачі взаємодія цих струмів з магнітним потоком зрушення викликає появу обертаючого моменту. Під дією цього моменту сельсин-приймач повертається в те ж положення, що і датчик. Такі автоматичні пристрої називаються слідкуючими системами.
6.6. Магнітопружні датчики
Принцип дії магнітопружних датчиків заснований на магнітопружному ефекті - фізичному явищі, що виявляється у виді зміни магнітної проникності феромагнітного матеріалу в залежності від механічних напруг у ньому. Магнітопружні датчики використовуються для виміру силових параметрів: зусиль, тисків, обертових і згинаючих моментів, механічних напруг і т.п..
Конструктивно магнітопружні датчики представляють собою магнітопровід з однією чи декількома обмотками. Магнітний опір сердечника
де l і s - довжина і площа перетину сердечника.
Якщо до сердечника прикладене механічне зусилля F, то магнітна проникність зміниться. Отже, зміняться і магнітний опір сердечника, і індуктивність обмотки на сердечнику. Як бачимо, є аналогія з індуктивними датчиками. В індуктивних датчиках також відбувається зміна магнітного опору, але за рахунок довжини чи перетину повітряного зазору. У магнітопружних датчиках зазор не потрібний, сердечники можуть бути замкнутими.
Так само як і індуктивні датчики, магнітопружні датчики можуть бути використані у виді одинарних (мал. 30, а), трансформаторних (мал.30, б), диференційно-трансформаторних (мал.30, в).
мал. 30.
Залежність магнітної проникності від механічних напруг має нелінійний характер. Зв'язано це як з нелінійністю кривої намагнічування, так і з нелінійною залежністю деформацій від зусилля. Нелінійність магнітопружного ефекту виражена дуже сильно. Наприклад, у слабких магнітних полях магнітна проникність під дією механічних напруг зростає, а в сильних полях - зменшується. Однак при визначених значеннях напруженості магнітного поля Н в сердечнику можна одержати близьку до лінійного залежність зміни магнітної проникності сердечника від відносної деформації чи нормальної механічної напруги у зоні лінійних деформацій. Найбільш помітний магнітопружний ефект у пермалоєвих (залізокобальтових і залізонікелевих) сплавах.
Слід зазначити, що в магнітопружних датчиках має місце і ще одне фізичне явище – магнітострикційний ефект. Його дія обернена магнітопружному ефекту: феромагнітне тіло, поміщене в магнітне поле, змінює свої геометричні розміри, тобто в ньому з'являються механічні деформації.
У перемінному магнітному полі і деформації будуть перемінними. А тому що знак деформації не залежить від напрямку магнітного поля, то частота коливань деформації буде в два рази вище частоти перемінного струму. На цьому принципі працюють, наприклад, магнітострикційні випромінювачі ультразвукових коливань.
6.7. Індукційні датчики
Індукційні датчики призначені для перетворення швидкості лінійних і кутових переміщень у ЕРС. Вони відносяться до датчиків генераторного типу.
Принцип дії індукційних датчиків заснований на законі електромагнітної індукції. Вихідним сигналом індукційних датчиків є ЕРС, що пропорційна швидкості зміни магнітного потоку, що пронизує витки котушки. Ця зміна відбувається за рахунок переміщення котушки в постійному магнітному полі чи за рахунок обертання феромагнітного індуктора щодо нерухомої котушки.
Основною відмінністю індукційних датчиків від індуктивних є те, що в них використовується постійне магнітне поле, а не змінне (живлення індуктивних датчиків здійснюється від мережі змінного струму). Постійне магнітне поле в індукційних датчиках створюється двома способами: постійними магнітами чи котушкою, по якій протікає постійний струм.
На мал. 31,а показана схема датчика з обмоткою 2, розміщена в повітряному зазорі, у якому постійний магнітний потік Ф створюється котушкою 1 включеної на постійну напругу U. При переміщенні котушки в магнітному полі в ній індукується ЕРС, пропорційна швидкості переміщення:
де к - коефіцієнт пропорційності, що залежить від числа витків 2 і конструктивних параметрів датчика.
На мал. 31,б показаний датчик, у якому постійний магнітний потік створюється за допомогою постійного магніту з полюсними наконечниками. ЕРС, індукуєма в обертовій котушці, пропорційнаі швидкості обертання :
В обох цих датчиках котушки рухливі, тому для відводу від них вихідного сигналу (ЕРС) необхідні гнучкі струмопроводи чи контактні кільця з щітками.
Індукційний датчик може бути виконанийі і в іншій конструкції: з нерухомою котушкою й обертовим постійним магнітом (мал. 31, в). Надійність при цьому підвищується за рахунок відсутності ковзного контакту.
Можливий і інший спосіб підвищення надійності датчика за схемою мал. 9,б: і котушка, і постійний магніт нерухомі, а в зазорі між ними обертається феромагнітне кільце з вирізами (мал. 31, г) чи інший елемент, що має істотно різну магнітну провідність по взаємно перпендикулярних осях. При обертанні змінюється потік, що пронизує площину котушки.
мал. 31.
У датчиках (мал. 31, б, в, г) як вихідний сигнал можна використовувати частоту ЕРС. Принцип їхньої дії власне кажучи такі ж, як у синхронних генераторів. Для виміру частоти обертання використовуються і спеціальні електричні машини малої потужності - тахогенератори.
Тахогенератор постійного струму (мал. 32, а) має обмотку збудження, що створює при живленні постійним струмом магнітний потік Ф. При обертанні якоря в ньому створюється ЕРС, пропорційна частоті обертання n:
Е= kФn,
де k - постійна, обумовленою конструкцією.
За допомогою колектора і щіток вихідний сигнал подається на навантаження у виді выпрямленного напруги.
Тахогенератор перемінного струму (мал. 32, б) має на статорі дві обмотки, зрушені одна щодо іншої на 90 ел. град.
мал 32
Одна обмотка включається в мережу перемінного струму. При обертанні ротора, виконаного у виді тонкостінного електропровідного циліндра, в іншій обмотці наводиться перемінна ЕРС, що пропорційна частоті обертання n. Для підвищення температурної стабільності як матеріал порожнього ротора використовується константан.
Тахогенератори мають високу чутливість і потужність вихідного сигналу. Загальним недоліком усіх генераторних датчиків є залежність вихідного сигналу від опору навантаження.
7. ЄМНІСНІ ДАТЧИКИ
7.1 Принцип дії. Типи ємнісних датчиків
Робота ємнісних датчиків полягає в перетворенні вимірюваної величини в ємнісний опір. Тому ємнісні датчики відносяться до параметричного. Принцип дії ємнісних датчиків заснований на залежності ємності конденсатора від розмірів обкладок, відстані між ними, діелектричної проникності середовища між обкладками.
Ємність конденсатора, що має дві плоскі обкладки,
де - відносна діелектрична проникність середовища між обкладками;
0 - діелектрична постійна (0 = 8,85·10-12 Ф/м);
s - площа обкладок;
d - відстань між обкладками.
Звідси випливає, що зміна ємності конденсатора може відбуватися через зміну кожної з трьох величин: d, s, . Найбільше поширення одержали ємнісні датчики, що вимірюють лінійні переміщення. На мал. 33, а, б показана схема ємнісного датчика лінійного переміщення і залежність ємності датчика від вхідного сигналу - переміщення х.
мал. 33
На мал. 34, а, б показана схема ємнісного датчика кутового переміщення і залежність ємності датчика від вхідного сигналу - кута повороту . У цьому датчику ємність змінюється через зміну площі взаємного перекриття двох обкладок - пластин 1 і 2. Одна з пластин (1) нерухома, інша (2) - може повертатися на осі щодо пластини 1. Відстань між пластинами не міняється, при повороті пластини 2 міняється активна площа між пластинами 1 і 2 (на мал. 34, а відзначена штрихуванням).
мал. 34
На мал. 35 показаний ємнісний датчик рівня. У цьому датчику ємність змінюється в залежності від рівня рідини, оскільки змінюється діелектрична проникність середовища між нерухомими пластинами.
мал. 35
7.2. Застосування ємнісних датчиків
Ємнісні датчики використовуються в колах змінного струму. Ємнісний опір обернено пропорційно частоті живлення.
При малій частоті живлення ємнісний опір настільки великий, що зміна струму в колі з ємнісним датчиком дуже важко зафіксувати навіть високочутливим приладом.
Застосування ємнісних датчиків є кращим при живленні підвищеною частотою (400 Гц і більше).
У ємнісному датчику тиску (мал. 36) однією з обкладок конденсатора є плоска кругла мембрана 1, що сприймає тиск Р. Інша обкладка 2 датчики нерухомий і має такий же радіус R, що і мембрана 1. Між обкладками конденсатора мається початковий повітряний проміжок dпоч. Під впливом вимірюваного тиску Р мембрана прогинається, причому найбільше переміщення 8 має центр мембрани.
мал. 36
Диференціальний емнісний датчик мал. 37 являє собою плоский конденсатор з металевою обкладкою 1, на котру діє вимірювана сила F. Обкладка 1 закріплена на пружній підвісці 6 і під дією сили F переміщається паралельно самої собі.
Дві нерухомі обкладки 2 і 3 ізольовані від корпуса спеціальними прокладками 4 і 5. При відсутності сили F обкладка 1 займає симетричне положення щодо нерухомих обкладок 2 і 3. При цьому ємність конденсатора, утвореного пластинами 1 і 2, дорівнює ємності конденсатора, утвореного пластинами 1 і 3. Під впливом вимірюваної сили F, що переборює протидія пружної підвіски 6, обкладка 1 переміщається і ємності верхнього і нижнього конденсаторів одержують збільшення різних знаків.
мал. 37 мал. 38
На мал. 38 зображений диференціальний ємнісний датчик кутових переміщень.
мал. 39
На мал. 39 показаний ємнісний датчик з циліндричними обкладками, застосовуваний для виміру рівня струмонепровідних рідин чи сипучих тел. Однією обкладкою може служити металевий бак чи резервуар із внутрішнім радіусом r1 друга обкладка виконана у виді металевого стрижня чи циліндра з зовнішнім радіусом r2. Якщо резервуар заповнений до рівня х рідиною з діелектричною проникністю, то ємність датчика можна представити як ємність двох паралельно з'єднаних конденсаторів.
Вимір рівня за допомогою ємнісних датчиків використовується в космічній і авіаційній техніці, хімії, нафтохімії, інших галузях промисловості.
Ємнісні датчики знайшли застосування також для автоматичного виміру товщини різних матеріалів і покрить у процесі їхнього виготовлення.
Розглянемо ємнісний датчик (мал. 40.) для виміру товщини матеріалу з діелектрика (наприклад, ізоляційної стрічки).
мал. 40
Між нерухомими обкладками конденсатора 1 протягається за допомогою роликів 2 контрольований матеріал 3.
Ємність датчика, що представляє собою плоский двообкладочний конденсатор із двошаровим діелектриком.
Чим менше різниця між d і Д, чим більше діелектрична проникність матеріалу , тим вище чутливість. Підвищити чутливість виміру за допомогою ємнісних датчиків можна за рахунок вибору відповідної вимірювальної схеми.
8. ТЕРМОРЕЗИСТОРИ
8.1. Призначення. Типи терморезисторів
Терморезистори відносяться до параметричних датчиків температури, оскільки їхній активний опір залежить від температури.
Терморезистори називають також термометрами опору чи термоопорами. Вони застосовуються для виміру температури в широкому діапазоні від -270 до 1600 °С.
Якщо терморезистор нагрівати, пропускаючи через нього електричний струм, то його температура буде залежати від інтенсивності теплообміну з навколишнім середовищем. Тому що інтенсивність теплообміну залежить від фізичних властивостей газового чи рідкого середовища (наприклад, від теплопровідності, щільності, в'язкості), у якій знаходиться терморезистор, від швидкості переміщення терморезистора щодо газового чи рідкого середовища, то терморезистори використовуються й у приладах для виміру таких неелектричних величин, як швидкість, витрата, щільність і ін.
Розрізняють металеві і напівпровідникові терморезистори.
Металеві терморезистори виготовляють з чистих металів: міді, платини, нікелю, заліза, рідше з молібдену і вольфраму.
Для більшості чистих металів температурний коефіцієнт електричного опору складає приблизно (4 - 6,5)· 10-3 1/С°, тобто при збільшенні температури на 1 °С опір металевого терморезистора збільшується на 0,4-0,65 %. Найбільше поширення одержали мідні і платинові терморезистори.
Хоча залізні і нікелеві терморезистори мають приблизно в півтора разу більший температурний коефіцієнт опору, ніж мідні і платинові, однак застосовуються вони рідше. Справа в тім, що залізо і нікель сильно окисляються і при цьому змінюють свої характеристики. Узагалі додавання в метал незначної кількості домішок зменшує температурний коефіцієнт опору. Сплави металів і метали, що окисляються, мають низьку стабільність характеристик. Однак при необхідності вимірювати високі температури приходиться застосовувати такі жароміцні метали, як вольфрам і молібден, хоча терморезисторы з них мають характеристики, що трохи відрізняються від зразка до зразка.
Широке застосування в автоматиці одержали напівпровідникові терморезистори, що для стислості називають термісторами.
Матеріалом для їхнього виготовлення служать суміші оксидів марганцю, нікелю і кобальту; германій і кремній з різними домішками й ін.
У порівнянні з металевими терморезисторами напівпровідникові мають менші розміри і великі значення номінальних опорів. Термістори мають на порядок більший температурний коефіцієнт опору (до -6 · 10-3 1/С°,). Але цей коефіцієнт - відємний, тобто при збільшенні температури опір термістора зменшується. Істотний недолік напівпровідникових терморезисторів у порівнянні з металевими - мінливість температурного коефіцієнта опору.
З ростом температури він сильно падає, тобто термістор має нелінійну характеристику. При масовому виробництві термістори дешевше металевих терморезисторов, але мають більший розкид характеристик.
8.2. Металеві терморезистори
Опір металевого провідника R залежить від температури:
де С - постійний коефіцієнт, що залежить від матеріалу і конструктивних розмірів провідника; - температурний коефіцієнт опору; е – основа натуральних логарифмів.
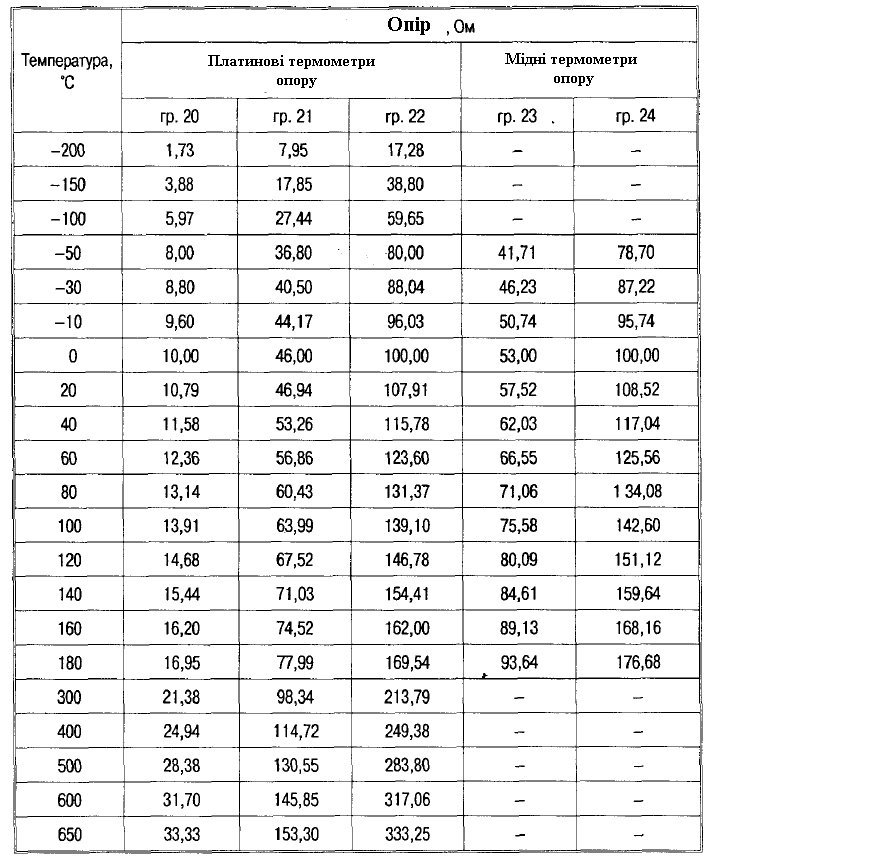
Мідні терморезистори випускаються серійно і позначаються ТСМ з відповідним градуюванням:
- гр. 23 має опір 53,00 Ом при 0 °С;
- гр. 24 має опір 100,00 Ом при 0 °С.
Мідні терморезисторы виконуються з дроту діаметром не менш 0,1 мм, покритою для ізоляції емаллю.
Для платинових терморезисторів, що застосовуються в більш широкому діапазоні температур, ніж мідні, варто враховувати залежність температурного коефіцієнта опору від температури.
Платинові терморезисторы випускаються серійно і позначаються ТСП з відповідним градуюванням:
- гр. 20 має опір 10,00 Ом при 0 °С,
- гр. 21 має опір 46,00 Ом при 0 °С;
- гр. 22 має опір 100,00 Ом при 0 °С.
Платина застосовується у виді неізольованого дроту діаметром 0,05-0,07 мм.
У таблиці приведені залежності опору металевих терморезисторів від температури; вони називаються стандартними градуїровочними таблицями.
На мал. 41 показана будова платинового термометра опору. Сам терморезистор виконаний із платинового дроту 1, намотаної на слюдяну пластину 2 з нарізкою. Слюдяні накладки 3 захищають обмотку і кріпляться срібною стрічкою 4. Срібні виводи 5 пропущені через порцелянові ізолятори 6. Термоопір міститься в металевий захисний чохол 7.
мал. 41.
8.3. Напівпровідникові терморезистори
Опір напівпровідникових терморезисторів (термісторів) різко зменшується з ростом температури. Їхня чутливість значно вище, ніж металевих, оскільки температурний коефіцієнт опору напівпровідникових терморезисторів приблизно на порядок більше, ніж у металевих. Правда, для термісторів цей коефіцієнт непостійний, він залежить від температури і їх рідко користаються при практичних розрахунках.
Основною характеристикою терморезистора є залежність його опору від абсолютної температури Т:
де А - постійний коефіцієнт, що залежить від матеріалу і конструктивних розмірів термістора; В - постійний коефіцієнт, що залежить від фізичних властивостей напівпровідника; е – основа натуральних логарифмів.
Порівняння формули показує, що в термісторів з ростом температури опір зменшується, а в металевих терморезисторів - збільшується. Отже, у термісторів температурний коефіцієнт опору має відємне значення.
Серійно випускаються мідно-марганцеві (тип ММТ) і кобальтово-марганцеві (тип КМТ) термістори.
мал. 42.
Термістори випускаються в різних конструктивних виконаннях: у виді стержнів, дисків, бусинок. На мал. 42 показані деякі конструкції термісторів.
Термістори типів ММТ-1, КМТ-1 (мал. 42, а) зовні подібні високоомним резисторам з відповідною системою герметизації.
Вони складаються з напівпровідникового стрижня 1, покритого емалевою фарбою, контактних ковпачків 2 зі струмовідводами 3.
Термістори типів ММТ-4 і КМТ-4 (мал.42, б) також складаються з напівпровідникового стрижня 1, контактних ковпачків 2 зі струмовідводами 3. Крім покриття емаллю стрижень обмотується металевою фольгою 4, захищений металевим чохлом 5 і скляним ізолятором 6. Такі термістори застосовні в умовах підвищеної вологості.
На мал. 42, в показаний термістор спеціального типу ТМ-54 - "Голка". Він складається з напівпровідникової кульки 1 діаметром від 5 до 50 мкм, що разом із платиновими електродами 2 впресований у скло товщиною порядку 50 мкм. На відстані біля 2,5 мм від кульки платинові електроди приварені до виводів 3 з нікелевого дроту. Термістор разом зі струмовідводами поміщений у скляний корпус 4. Термістори типу МТ-54 мають дуже малу теплову інерцію, їхня постійна часу порядку 0,02 с, і вони використовуються в діапазоні температур від -70 до +250 °С. Малі розміри термістора дозволяють використовувати його, наприклад, для вимірів у кровоносних судинах людини.
8.4. Застосування терморезисторів
При використанні терморезисторів як датчики систем автоматики розрізняють два основних режими. У першому режимі температура терморезистора практично визначається тільки температурою навколишнього середовища. Струм, що проходить через терморезистор, дуже малий і практично не нагріває його. В другому режимі терморезистор нагрівається проходячим по ньому струмом, а температура терморезистора визначається умовами тепловіддачі, що змінюються, наприклад інтенсивністю обдува, щільністю навколишньої газового середовища і т.п..
При використанні терморезисторів у першому режимі вони відіграють роль датчиків температури і називаються звичайно термометрами опору. Найбільше поширення одержали термометри опору типів ТСП (платинові) і ТСМ (мідні), що включаються в мостову вимірювальну схему.
У процесі виміру температури за допомогою термометрів опору можуть виникати наступні погрішності: 1) від коливання напруги живлення; 2) від зміни опору сполучних проводів при коливаннях температури навколишнього середовища; 3) від власного нагрівання датчика під дією струму, що протікає через нього.
Розглянемо тепер деякі приклади використання власного нагрівання терморезисторів у пристроях для виміру різних фізичних величин, побічно зв'язаних з температурою.
Автоматичний вимір швидкості газового потоку проводиться за допомогою термоанемометра. Датчик цього приладу (мал. 43, а) складається з терморезистора, що представляє собою тонкий платиновий дріт 1, припаяний до двох манганінових стрижнів 2, закріпленим в ізоляційній втулці 3. За допомогою виводів 4 терморезистор включається у вимірювальну схему. Через терморезистор пропускається струм, що викликає його нагрівши. Але температура (а отже, і опір) терморезистора буде визначатися швидкістю газового потоку, у який поміщений датчик. Чим більше буде ця швидкість, тим інтенсивніше буде відділятися теплота від терморезистора.
мал. 43
На мал. 43, б показана градуровочная крива термоанемометра, з якої видно, що при збільшенні швидкості приблизно вдвічі опір терморезистора зменшується приблизно на 20 %.
На аналогічному принципі заснована робота електричного газоаналізатора.
Якщо взяти два однакових терморезистора, що саморозігріваються, і помістити один у камеру, наповнену повітрям, а інший - у камеру, наповнену сумішшю повітря з вуглекислим газом СО2, то через різну теплопровідність повітря і вуглекислого газу опір терморезисторов буде різним. Тому що теплопровідність вуглекислого газу значно менше теплопровідності повітря, то і відвід теплоти від терморезистора в камері з СО2 буде менше, ніж від терморезистора в камері з повітрям. По різниці опорів терморезисторов можна судити про процентний вміст вуглекислого газу в газовій суміші.
Залежність теплопровідності газу від його тиску дозволяє використовувати терморезистори з власним нагріванням в електричних вакуумметрах. Чим глибше вакуум (тобто більш розріджений газ), тим гірше умови тепловіддачі з поверхні терморезистора, поміщеного у вакуумну камеру. Якщо через терморезистор пропускати струм для його нагрівання, то температура терморезистора буде зростати при зменшенні тиску контрольованого газу.
Таким чином, за допомогою терморезисторов можна вимірювати швидкості і витрата газів і рідин, тиск і щільність газів, визначати процентний уміст газів у суміші. Крім платини в таких приладах використовують вольфрам, нікель, напівпровідникові терморезисторы. Для того щоб виключити вплив коливань температури навколишнього середовища, прагнуть забезпечити досить інтенсивне власне нагрівання (до 200-500 °С).
9. ТЕРМОЕЛЕКТРИЧНІ ДАТЧИКИ
9.1. Принцип дії
Термоелектричні датчики відносяться до датчиків генераторного типу. Їхня робота заснована на одному з термоелектричних явищ - появі термоелектрорушійної сили (термо-е.р.с).
Сутність цього явища полягає в наступному. Якщо скласти електричне коло із двох різнорідних металевих провідників (чи напівпровідників), причому з одного кінця провідники згрупувати, а місце з'єднання (спай) нагріти, то в такому колі виникає ЕРС. Ця ЕРС буде пропорційна температурі місця спаю (точніше - різниці температур місця спаю і вільних, неспаяних кінців). Коефіцієнт пропорційності залежить від матеріалу провідників і у визначеному інтервалі температури залишається постійним. Коло, складене із двох різнорідних матеріалів, називається термопарою; провідники, що складають термопару, називаються термоелектродами; місця з'єднання термоелектродів - спаями. Спай, що поміщається в середовище, температуру якого треба вимірити, називається гарячим чи робочим. Спай, щодо якого виміряється температура, називається холодним чи вільним. Виникаюча при різниці температур гарячого і холодного спаїв ЕРС називається термо-е.р.с. За значенням цієї термо-е.р.с можна визначити температуру.
Фізична сутність виникнення термо-е.р.с. пояснюється наявністю вільних електронів у металах. Ці вільні електрони хаотично рухаються між позитивними іонами, що утворять основу кристалічних ґрат. У різних металах вільні електрони володіють при одній і тій же температурі різними швидкістю й енергією. При з'єднанні двох різнорідних металів (електродів) вільні метали з одного електрода проникають в іншій. При цьому метал з більшою енергією і більшою швидкістю вільних електронів їх втрачає. Отже, він здобуває позитивний потенціал. Метал з меншою енергією вільних електронів здобуває негативний потенціал. Виникає контактна різниця потенціалів. При однаковій температурі спаїв (1 = 2 на мал. 44, а) контактна різниця потенціалів не може створити струму в замкнутомуколі. Контактна різниця в спаї 1 спрямована назустріч контактної різниці в спаї 2. Але якщо нагріти один зі спаїв (робочий) до температури 1 > 2, то контактна різниця в спаї 1 збільшиться, а в спаї 2 залишиться без зміни. У результаті в контурі і виникає термо-е.р.с., тим більша, чим більше різниця температур спаїв 1 і 2.
Для виміру термо-ерс, вироблюваною термопарою, у ланцюг термопари включають вимірювальний прилад (наприклад, мілівольтметр).
мал. 44
Мілівольтметр включають, розімкнувши вільний спай (мал.44, б), або в розрив одного з термоелектродів (мал.44, в). Як видно зі схем включення вимірювального приладу, у випадку розімкнутого вільного спаю (мал.44, б) у термопари три спаї: один гарячий 1 і два холодних 2 і 3, що повинні мати постійну температуру. При включенні мілівольтметра в розрив одного з термоелектродів (мал.44, в) є чотири спаї: один гарячий 1, однин холодний 2 (він повинний мати постійну температуру), два нейтральних 3 і 4 (вони повинні знаходитися при однаковій, але не обов'язково постійній температурі).
Для обох схем термо-ерс і показання приладу будуть однаковими, якщо відповідно однаковими будуть температури гарячих і холодних спаїв.
Спосіб виготовлення спаю (зварюванням, спайкою і т.п. ) на термо-ерс не впливає, якщо тільки розміри спаю такі, що температура його у всіх точках однакова.
Значення термо-ерс і її напрямок залежать від матеріалів електродів А и В.
У таблиці приведені термо-е.р.с. для різних матеріалів у парі з платиною при температурі гарячого спаю 100 °С (373 К) і температури холодного спаю 0 °С (273 К). Знак плюс перед термо-ерс означає, що в холодному спаї струм йде в напрямку до платинового електрода.
Якщо скласти термопару з матеріалів, що стосовно платини мають термо-ерс різних знаків, то термо-ерс такої термопари буде дорівнює сумі терм-ерс матеріалів стосовно платини. Матеріали для термопар варто підбирати таким чином, щоб термо-ерс мали досить великі значення, що забезпечують високу чутливість виміру.
9.2. Матеріали, застосовувані для термопар
До матеріалів для термоелектродів термопар крім вимоги одержання великого значення термо-ерс пред'являються й інші вимоги.
Мабуть, найбільш важливим з них є забезпечення взаємозамінності. Це означає, що термопари того самого типу повинні мати при однакових температурах ту саму термо-ерс.
У цьому випадку заміна термопари не повинна привести до перенастроювання чи переградуювання вимірювального приладу.
У залежності від матеріалу електродів термопари, що одержали практичне застосування, розділяються на дві основні групи: із благородних і неблагородних металів.
В таблиці дана залежність термо ЕРС для стандартних термопар (при температурі вільного кінця 0 °С)
Найбільше поширення з першої групи одержала термопара типу ТПП. Один електрод її виготовлений із платинородія (90 % платины і 10 % родію), іншої - з чистої платини. Ця термопара може використовуватися як зразкова. Перевагами її є хімічна стійкість до окисного середовища, взаємозамінність термоэлектродов, повторюваність характеристик. Недолік - мале значення термоэдс. Термопара типу ТПП може довгостроково працювати при температурі 1300 °С, термо-е.р.с. її при цій температурі складає 13,152 мВ.
Для більш високих температур (довгостроково - до 1600 °С, короткочасно - до 1800 °С) застосовується термопара ТПР. Один електрод- платинородій (70 % платины і 30 % родію), інший електрод також платинородій (94 % платины і 6 % родію). При температурі 1800 °С термо-ерс складає 13,927 мВ.
Істотно великі значення термо-ерс мають термопари з неблагородних металів, матеріалом для електродів яких служать спеціально розроблені сплави: хромель (89 % нікелю, 9,8 % хрому, 1 % заліза, 0,2 % марганцю), алюмель (94 % нікелю, 2,5 % марганцю, 2 % алюмінію, 1 % кремнію, 0,5 % заліза), копель (55 % міді, 45 % нікелю).
Найбільше поширення одержали термопари типу ТХА (хромель-алюмель) і типу ТХК (хромель-копель). Хромель-алюмелеві термопари застосовують для виміру температур у межах від -50 до 1000 °С. Вони здатні працювати в окисному середовищі, оскільки утворена при нагріванні тонка захисна плівка перешкоджає проникненню кисню усередину металу. Хромель-копелеві термопари мають найбільшь високу чутливість: 6,95 мВ на 100 °С. Однак діапазон вимірюваних температур (від -50 до 600 °С) трохи нижче, ніж у термопар типу ТХА. Трохи гірше в термопар типу ТХК і лінійність характеристики. Їхнім достоїнством є більш висока вологостійкість.
На мал 45. показані залежності термо-ерс від температури для різних термопар.
мал. 45
Конструктивно термопари виконуються в спеціальній арматурі, що забезпечує захист електродів від дії гарячих хімічно агресивних газів і пар, електричну ізоляцію виводів.
Для захисту термопар з неблагородних металів застосовують сталеві трубки діаметром 21 мм і з максимальною глибиною занурення до 2 м.
Тому що термопари є датчиками генераторного типу, то їх у принципі можна використовувати і для одержання електроенергії.
Вимірювальні термопари для цієї мети практично непридатні, оскільки їх термо-ерс невелика. Але термопари з електродами з напівпровідникових матеріалів мають термо-ерс, на порядок більшу (до 65 мВ на 100 °С). За допомогою таких термопар може здійснюватися, наприклад, і перетворення сонячної енергії в електричну. Знайшли застосування вони в побуті: термогенератори використовуються для живлення радіоприймачів. КПД напівпровідникових термоелементів досягає 10 %. Для цілей виміру напівпровідникові термопари поки не застосовуються через не лінійність характеристики, малої механічної міцності і порівняно малого (до 500 °С) температурного діапазону.
9.3. Вимір температури за допомогою термопар
При автоматичному вимірі температури за допомогою термопар використовуються два основних методи: безпосередній вимір термо-ерс за допомогою мілівольтметра і компенсаційний метод.
Тому що значення термо-ерс, що розвивається термопарою, невелика, для безпосереднього виміру її необхідні високочутливі мілівольтметри магнітоелектричного типу. Прилади цього типу працюють на основі взаємодії магнітного поля постійного магніту і вимірюваного струму, що протікає по рухливій рамці. Для створення достатнього обертаючого моменту при дуже невеликому струмі рамка виконується з великого числа витків тонкого мідного проводу. Протидіючий момент створюється спіральними пружинами, по яких і підводиться струм у рамку.
Шкала мілівольтметра градуюється безпосередньо в градусах і на ній указується тип термопари, для якої призначений даний мілівольтметр.
мал 46. мал 47.
На мал 46. показано схему включення термопари для виміру температури.
Розглянемо вимір температури компенсаційним методом за допомогою термопари й автоматичного потенціометра. На мал. 47 показана термопара ТП, що виробляє термо-ерс Еп, і мостова схема, що виробляє напругу, що компенсує, UK, що знімається між точками А і Б. Різниця цих напруг подається на вхід підсилювача (У), що живить керуючу обмотку виконавчого електродвигуна (ЭД). Обмотка збудження ЭД постійно підключена до джерела перемінної напруги, а швидкість обертання ЭД залежить (приблизно пропорційно) від напруги на його керуючій обмотці. Електродвигун (ЭД) через редуктор (Р) переміщає движок каліброваного реохорда (потенціометричного датчика) Rп доти , поки напруга не зрівняється с ЕРС. Одночасно переміщаються покажчик на шкалі приладу і перо самописця. При UK = Ед напруга на вході підсилювача дорівнює нулю і електродвигун (ЭД) зупиниться.
Кожному значенню вихідного сигналу датчика відповідає визначене положення покажчика на шкалі. Шкала проградуйована в °С і на ній зазначений тип термопари, для якої виконана градуїровка.
10. ФОТОЕЛЕКТРИЧНІ ДАТЧИКИ
10.1. Призначення. Типи фотоелектричних датчиків
Фотоелектричні датчики реагують на зміну освітленості. Як правило, фотоелектричний датчик складається з джерела і приймача світлового потоку (ПСП). Джерелом світлового потоку може бути сам об'єкт виміру чи спеціальний освітлювач (наприклад, у виді звичайної лампи накалювання). Досвідчений сталевар, розглядаючи через темно-синій світлофільтр розплавлений метал, може визначити "на око" його температуру, необхідність внесення яких-небудь добавок.
мал. 48
По світловому потоці, що виходить від розпеченого чи розплавленого металу, фотоелектричний пірометр автоматично вимірює температуру. У даному випадку джерелом світлового потоку є сам об'єкт виміру (мал.48, а).
Однак частіше використовуються лампи накалювання, що створюють постійний світловий потік, а його зміна відбувається під впливом переміщення шторки (мал.48, б), проходження світла через контрольоване середовище (мал.48, в), під впливом властивостей контрольованого об'єкта, від якого відбивається світловий потік (мал.48, г).
Відповідно до цих можливих варіантів зміни світлового потоку за допомогою фотоелектричних датчиків можна вимірювати переміщення і підраховувати число предметів, визначати рівень, прозорість, задимленість, колір різних матеріалів, оцінювати якість обробленої поверхні (блиск, шорсткість, фарбування). Фотоелектричні датчики використовують в оптико-електронних перетворювачах різних величин. Тут варто нагадати, що більш 75 % всієї інформації, що одержує людина, сприймається за допомогою зору. Тому і фотоелектричні датчики, що сприймають оптичну інформацію, знаходять широке застосування. За допомогою фотоелектричних датчиків здійснюється і так називаний "технічний зір".
У приймачах світлового потоку фотоелектричних датчиків використовується фотоефект. Під фотоефектом розуміють зміну властивостей матеріалу при зміні його освітленості. Розрізняють зовнішній, внутрішній і вентильний фотоефект.
Зовнішній фотоефект полягає в тому, що під впливом потоку випромінювання електрони вилітають з катода електронної лампи і струм емісії залежить від освітленості катода.
Внутрішній фотоефект виявляється в тім, що активний опір напівпровідникового матеріалу залежить від його освітленості.
При вентильному фотоефекті між шарами освітленого провідника і неосвітленого напівпровідника, розділених тонким ізоляційним шаром, виникає ЕРС, що залежить від освітленості.
При зовнішньому фотоефекті носії струму виходять за межі матеріалу, при внутрішньому - залишаються усередині напівпровідника. Вентильний фотоефект, строго говорячи, теж є внутрішнім фотоефектом.
Усі фотоелектричні датчики є селективними (вибірковими), тобто їхня чутливість залежить від частоти світлового випромінювання. Іншими словами, ці датчики реагують на визначений колір: червоний, зелений, синій чи інший, включаючи і невидиму частину спектра (інфрачервоне й ультрафіолетове випромінювання).
Діапазон довжин хвиль видимого світла = 0,380,78 мкм. Більш короткі хвилі відносяться до ультрафіолетового діапазону, більш довгі - до інфрачервоного.
10.2. Приймачі випромінювання фотоелектричних датчиків
До приймачів випромінювання на основі зовнішнього фотоефекта відносяться електровакуумні чи газонаповнені фотоелементи, фотоелектронні помножувачі і передавальні електронно-променеві трубки.
До приймачів випромінювання на основі внутрішнього фотоефекта відносяться фоторезистори, фотодіоди і фототріоди. Усі приймачі випромінювання є електронними і напівпровідниковими приладами і вивчаються в курсі електроніки. Тут будуть розглянуті тільки короткі фізичні основи їхньої роботи і характеристики тих приймачів випромінювання, що знайшли застосування в системах автоматики.
На мал. 49 приведена схема включення вакуумного фотоелемента.
мал. 49
Анод А та катод К фотоелемента знаходяться в скляному балоні, з якого відкачане повітря. Коли світловий потік падає на катод, покритий активним шаром, електрони одержують енергію, що дозволяє їм вилетіти з катода. Це явище називається фотоелектронною емісією. Під дією джерела живлення з ЕРС Е між катодом і анодом створюється електричне поле, що і змушує електрони переміщатися від катода до анода.
В електричному ланцюзі створюється електричний струм, називаний фотострумом. Коли дія світла припиняється, струм у фотоелементі і зовнішньому електричному колі зникає.
Залежність фотоструму від світлового потоку називається світловою характеристикою. Ця характеристика при постійних значеннях Е та R практично лінійна. Фотоелемент характеризується також чутливістю, що дорівнює відношенню фотоструму (у мікроамперах) до світлового потоку (у люменах). У газонаповнених фотоелементах завдяки іонізації молекул газу, що заповнює балон, фотострум збільшується. Тому чутливість газонаповнених фотоелементів більше, ніж у вакуумних. Однак світлова характеристика вакуумного фотоелемента більш стабільна, менш залежна від коливань напруги живлення, чим у газонаповнених елементів. Тому для цілей автоматичного виміру частіше застосовуються вакуумні фотоелементи.
Фотоелектронні помножувачі (ФЕП) на відміну від фотоелементів мають додаткові електроди. Завдяки вторинній емісії електронів з цих електродів чутливість ФЕП в багато разів перевищує чутливість фотоелементів. Однак для ФЕП потрібна і значно більша напруга живлення.
Фоторезистор складається зі світлочутливого шару напівпровідника товщиною біля мікрометра, нанесеного на скляну чи кварцову пластинку. Струмознімальні електроди виконані з застосуванням дорогоцінних металів. При внутрішньому фотоефекті під дією світлового потоку в напівпровіднику з'являються додаткові вільні електрони, завдяки чому збільшується електропровідність, а опір фоторезистора зменшується.
Промисловістю випускаються фоторезистори типів СФ, ФР, ФС різних модифікацій. У них використовуються напівпровідникові матеріали: сірчистий кадмій, сірчистий свинець, германій, індій і ін.
На мал. 50, б, в, г показаний зовнішній вигляд деяких фоторезисторів,
мал. 50
До недоліків фоторезисторів варто віднести їх інерційність. Вона полягає в тім, що при освітленні фоторезистора фотострум не відразу досягає свого кінцевого значення, а при припиненні освітлення струм знижується до первинного значення також не миттєво, а після закінчення визначеного часу. Постійна часу фоторезисторів складає десяті і соті долі секунди. Ще один недолік фоторезисторів - залежність опору від температури.
Фотодіодами називаються напівпровідникові прилади, засновані на внутрішньому фотоефекті і використовуючі однобічну провідность р-n-переходу.
Розрізняють два режими роботи фотодіодів: фотогальванічний і фотодіодний.
У фотогальванічному режимі не потрібно джерело живлення, оскільки при освітленні р-n-переходу з'являється ЕРС, під дією якої виникає струм у зовнішньому колі. У цьому режимі фотодіод безпосередньо перетворить енергію світла в електричну енергію. При освітленості в 8·103 лк фото-е.р.с. складає близько 0,1 В.
У фотодіодному режимі до фотодіода прикладається напруга зворотної полярності, тобто така, при якій звичайний діод не проводив би струм. При освітленні фотодіода (його р-n-переходу) зворотний струм різко збільшується, фотодіод починає проводити струм у зворотному напрямку.
Промисловістю випускаються фотодіоди типу ФД різних модифікацій. Як матеріал чуттєвого шару використовуються германій, кремній, селенів. На мал.51, а, б показані конструкції деяких фотодіодів, на мал.51, в – його будова.
На металеву пластинку 1 наноситься шар напівпровідника 2, поверх якого осаджується напівпрозора плівка золота 3. Між золотою плівкою і напівпровідником створюється замикаючий шар. Поверх плівки 3 накладається захисний шар прозорого лаку 4. З зовнішнім колом фотодіод з'єднується за допомогою виводів, одним із яких є контактне металеве кільце 5.
мал. 51.
При замиканні фотодіода на опір навантаження по зовнішньому колі потече струм, що залежить від світлового потоку. Такий режим роботи фотодіода називається фотогальванічним. У цьому режимі фотодіод безпосередньо перетворить енергію світла в електроенергію. Чутливість фотодіода до сумарного світлового потоку при короткому замиканні селенових фотоелементів досить велика і складає 0,5 мА на 1 лм. При збільшенні зовнішнього опору в колі фотодіода його чутливість падає. Інерційність фотодіодів приблизно на порядок менше, ніж у фоторезисторів.
Фотодіоди частіше використовуються не для цілей автоматичного виміру, а в схемах фотореле. Для цих же цілей використовуються і фототранзистори, що сполучають властивості фотодіода і підсилювального транзистора.
10.3 Застосування фотоелектричних датчиків
Фотоелектричні датчики одержали дуже широке поширення в системах автоматики і мають гарну перспективу подальшого поширення.
Найбільше часто вони використовуються в схемах релейної дії, де видають дискретний сигнал: «Освітлено» чи «Затемнено».
Фотореле складається з освітлювача, що створює світловий потік, і приймача випромінювання (фотоелемента, фоторезистора, чи фотодіода фототранзистора). Приймач випромінювання включений у коло обмотки електромеханічного реле (чи безпосередньо частіше через підсилювач). При попаданні світлового потоку на приймач стрибком змінюється фотострум і спрацьовує реле, здійснюючи необхідні переключення в схемі керування яким-небудь пристроєм.
Такі фотореле використовуються в турнікетах, що пропускають пасажирів у метро, фіксують досягнення різними механізмами визначених положень, дуже широко застосовуються в автоматичних пристроях захисту обслуговуючого персоналу від виробничих травм. Коли рука робітника випадково перетинає світловий бар'єр, що обгороджує небезпечну зону, подається попереджуючий сигнал чи механізм узагалі зупиняється. За допомогою фотодатчиків здійснюється зчитування дискретної інформації з перфострічки.
Інформація на такій стрічці записана за допомогою отворів, що пробиваються у визначених місцях. Наявність отвору означає цифру 1, а відсутність отвору - цифру 0 у двійковому коді. Кожному розряду в двійковій формі числення відповідає місце розташування отворів на перфострічці. Перфострічка прокручується між освітлювальною лампою і декількома фотодатчиками (мал. 52, а), кількість яких відповідає числу розрядів, що зчитуються. Для таких цілей можуть використовуватися спеціальні напівпровідникові прилади, що поєднують в одній конструкції кілька фотодатчиків.
Ці фотодатчики розташовуються в одну лінію один заодним, наприклад, так називана лінійка фотодіодів. Є також і фотодіодні матриці, де фотодатчики розташовані, як клітки в таблиці.
Лінійку фотодіодів використовують для виміру розмірів деталі, переміщуваної на конвеєрі. Деталь перекриває світловий потік (мал.52, б) і затемнює таку кількість фотодіодів, що відповідає висоті деталі.
мал. 52.
Вимір довжини переміщуваної деталі може виконуватися і по сигналі одного фотодатчика (мал. 52, в). Деталь, перетинаючи передньою крайкою світловий бар'єр, дає сигнал на підрахунок числа імпульсів.
Коли фотодатчик знову висвітлюється, підрахунок імпульсів закінчується. По зафіксованому лічильником кількості імпульсів визначається довжина предмета, що рухається. Датчик імпульсів кінематично зв'язаний із приводом конвеєра. Тому коливання швидкості руху деталі не впливають на точність виміру її довжини.
Розглянемо застосування фотоелектричних датчиків для перетворення кута повороту в цифровий код (мал. 53, а, б).
мал. 53.
Освітлювач направляє світловий потік через прозорий диск, на який фотохімічним способом нанесена кодова шкала з прозорими і непрозорими ділянками. З іншої сторони диска розташовані фотоприймачі, кількість яких дорівнює числу розрядів двійкового числа. На мал.53 показаний кодовий диск із шістьма розрядами.
Самий старший розряд розташований ближче усього до центра диска.
Прозора ділянка означає двійкову цифру "1", непрозорий - двійкову цифру "0". Якщо у всіх розрядах "0", то це двійковий код числа 0. Якщо у всіх розрядах "1", то це двійковий код десяткового числа 63 (1111112 =6310). Світло, проходячи через кодовий диск, попадає на фотоприймачі. Наявність вихідного сигналу з фотоприймача приймається за "1", відсутність - за "0".
Такий пристрій називається аналого-цифровим перетворювачем чи кодовим датчиком.
Для виміру обертового моменту, застосовуються фотоелектричні торзіометри. Перед дротовими тензометрами вони мають ту перевагу, що не мають потребу в струмознімальному пристрої.
Вони забезпечують безконтактне знімання сигналу з обертового вала. Принцип дії фотоелектричного торзиометра показаний на мал. 54. На випробуваному валу 1 укріплені два диски 2, що мають прорізи (вікна) у радіальному напрямку. Ці диски обертаються разом з валом. Під дією моменту навантаження вал скручується і диски зміщаються один щодо одного на кут, пропорційний моменту і відстані між дисками.
мал. 54.
На нерухомій частині торзіометра розташоване джерело світла 3 (лампа накалювання) і два фотоприймачі 4. Лампа поміщена посередині між дисками, а фотоприймачі розташовані по обох сторонах дисків. При відсутності обертового моменту, прорізи правого і лівого дисків знаходяться на одній осі і світловий потік одночасно попадає на обидва фотоприймачі. Отже, у цьому випадку фотоструми обох приймачів будуть збігатися по фазі. При збільшенні обертового моменту, диски зміщаються один щодо одного і висвітлення фотоприймачів буде відбуватися не одночасно, а зі зрушенням у часі. Тому фотоструми приймачів 4 виявляться зрушеними по фазі. Кількість прорізів на кожнім диску і відстань між ними звичайно вибирають так, щоб при максимальному обертовому моменті, фазове зрушення між фотострумами складав 180 . Вимірювальне коло приладу здійснює вимір фазового зрушення між струмами, чи вимір часу між імпульсами фотострумів.
Останнім часом як джерела світла для фотоелектричних датчиків усі частіше застосовуються не лампи накалювання, а світлодіоди, що мають велику надійність і дуже мале споживання електроенергії для живлення.
Взагалі треба відзначити, що зараз дуже швидко розвивається оптоелектронна техніка, що забезпечує як перетворення енергії світла в електроенергію, так і зворотне перетворення.
Як датчики положення, визначення якості поверхонь, для зчитування графічної інформації починають застосовуватися відбивні оптрони.
Для високоточних вимірів малих переміщень використовують фотоелектричні датчики, у яких між джерелом світла і фотоприймачем містяться диски чи лінійки з прозорого матеріалу з нанесеними на них непрозорих штрихів. В даний час відомі лінійки, що мають до тисячі штрихів на 1 мм довжини. Тому навіть при малому переміщенні лінійки виникає значна зміна сигналу фотоприймача. Ще більш високу чутливість можна одержати з використанням двох лінійок, штрихи однієї з який виконані з невеликим нахилом. При взаємному переміщенні таких лінійок виникає так називаний "муаровий" ефект. При незначному переміщенні лінійок з'являються темні "муарові" смуги і світловий потік, що падає на фотоприймач, різко змінюється.
В усіх розглянутих вище прикладах сам фотострум не впливав на точність чи виміру перетворення. Фотоприймачі працювали не в аналоговому, а в дискретному режимі. Такий режим дозволяє мати більш прості конструкції і схеми приладів, тому що не потрібно забезпечити високу стабільність світлового потоку і напруги живлення.
Однак фотоелектричні датчики використовуються й в аналоговому режимі, коли саме за значенням фотоструму визначається вимірювана неелектрична величина. При вимірі високих температур (більш 1000 °С) широке поширення одержали пірометри, що використовують променисту енергію тіл, температура яких виміряється. За допомогою фотоелектричних датчиків побудовані яркістні пірометри і колірні пірометри.
Фотоелектричний яркістний пірометр заснований на використанні залежності між струмом І фотоелемента і температурою Т джерела випромінювання, що засвітлює фотоелемент. Ця залежність має вид І = аТn , де коефіцієнт а залежить від чутливості фотоелемента, а n - від його спектральної характеристики. Коефіцієнт n досягає 10-12 і може бути збільшений підбором відповідних світлофільтрів. При використанні як фотоприймачі фоторезисторів їх включають у мостову схему (мал. 55).
мал. 55
На фоторезистор ФР1 падає світловий потік від контрольованого об'єкта. На фоторезистор ФР2 падає світловий потік від лампочки накалювання. При порушенні балансу моста напруга з його вимірювальної діагоналі подається на підсилювач, що живить лампу накалювання і змінює її розжарення таким чином, щоб зменшити розбаланс моста.
Амперметр у колі лампи накалювання може бути проградуйований в одиницях температури. Градуювання проводиться за показниками зразкового пірометра.
В основу роботи фотоелектричних колірних пірометрів покладене наступне фізичне явище, називане законом зсуву.
При нагріванні тіло випромінює світловий потік, де присутні різні кольори, тобто маються електромагнітні коливання з різними довжинами хвиль. Однак кожній температурі відповідає визначена довжина хвилі, на якій інтенсивність випромінювання максимальна.
У колірних пірометрах визначається відношення інтенсивностей випромінювання даного тіла в променях двох заздалегідь обраних довжин хвиль. Це відношення для кожної температури буде різним, воно однозначно визначає температуру тіла.
мал. 56
На мал.56 показана схема фотоелектричного колірного пірометра.
Випромінювання від об'єкта виміру А надходить на фотоелемент 1 через диск 2, у якому поперемінно розташовані червоні і сині світлофільтри. Диск приводиться в обертання з постійною швидкістю електродвигуном 3. Таким чином, на фотоелемент поперемінно попадають то червоні, те сині промені. Синхронно з обертанням диска 2 посилений сигнал з фотоелемента переключається комутатором 4, що виділяє два сигнали: відповідний інтенсивності червоних променів і відповідний інтенсивності синіх променів. Вимірник відношення сигналів (наприклад, логометрического типу) проградуйований в одиницях температури.
Становить інтерес використання фотоелектричного датчика у вимірнику вологості (психрометрі). Вологість можна визначити по так називаній "точці роси". Відомо, що водяна пара, наявна у газі, починає конденсуватися (осаджуватися у виді роси) при визначеній температурі, що залежить від вологості.
Для визначення початку осадження роси і служить фотодатчик. Промінь освітлювача падає на маленьке дзеркальце і відбивається на фотоприймач. Поверхня дзеркальця може прохолоджуватися і нагріватися системою терморегулювання, що включається по сигналі фотодатчика.
Якщо температура дзеркала знижується до точки роси, то туман, що з'являється на поверхні дзеркала, зменшує світловий потік, що падає на фотоприймач, і фотострум різко зменшується.
Спрацьовує реле, що включає нагрівач дзеркала. Через деякий час температура дзеркала підвищиться, туман на ньому зникне, фотострум різко зросте і спрацює реле, що включає охолоджувач дзеркала. Таким чином, температура дзеркальця буде безупинно коливатися щодо точки роси. Вимірюючи її за допомогою терморезистора чи термопари, можна визначити вологість.
Фотоелектричні датчики застосовують для виміру різних неелектричних величин. У машинобудуванні застосовуються фотоелектричні датчики розмірів деталей. За допомогою оптичних систем можна спроектувати контур маленької деталі на дуже велику площу, що істотно підвищує чутливість і точність виміру. У механічних контактних датчиках для цього потрібні були б підоймові системи, які б впливали на деталь. А фотоелектричний датчик не навантажує деталь. З його допомогою можна контролювати розміри тендітних і неміцних деталей і вузлів.
Застосовуються фотоелектричні датчики для визначення задимленості і загазованості при промислових викидах в атмосферу, що дуже важливо для охорони природи і здоров'я людей.
Фотоелектричні колориметри, блескомери, нефелометри дозволяють об'єктивно оцінити якість виготовлення й обробки різних виробів по їхньому кольорі, поліруванню, прозорості відповідно.
За допомогою фотоелектричних датчиків виконується автоматичне зчитання машинописних і рукописних буквених і цифрових текстів.
11. УЛЬТРАЗВУКОВІ ДАТЧИКИ
11.1 Принцип дії і призначення
Робота ультразвукових датчиків заснована на взаємодії ультразвукових коливань з вимірюваним середовищем. До ультразвукового відносять механічні коливання, що відбуваються з частотою більш 20 000 Гц, тобто вище верхньої межі звукових коливань, сприйманих людським вухом. Поширення ультразвукових коливань у твердих, рідких і газоподібних середовищах залежить від властивостей середовища. Наприклад, швидкість поширення цих коливань для різних газів знаходиться в межах від 200 до 1300 м/с, для рідин - від 1100 до 2000, для твердих матеріалів - від 1500 до 8000 м/с. Дуже сильно виражена залежність швидкості коливань у газах від тиску.
Різні коефіцієнти відображення ультразвукових хвиль на границі розділу різних середовищ, різна і звукопоглинальна здатність різних середовищ. Тому в ультразвукових датчиках інформація про різні неелектричні величини виходить завдяки виміру параметрів ультразвукових коливань: часу їхнього поширення, загасання амплітуди цих коливань, фазового зрушення цих коливань.
Ультразвукові методи виміру відносяться до електричних методів остільки, поскільки порушення ультразвукових коливань і прийом цих коливань виконуються електричним способом.
Звичайно для цього використовують п’єзоелементи і магнітострикційні перетворювачі. П'єзоелектричні датчики перетворюють тиск в електричний сигнал. Це прямий пєзоефект. Він використовується в приймачах ультразвукового випромінювання. Зворотний п'єзоелектричний ефект полягає в стиску і розтяганні п’єзокристала, до якого прикладена перемінна напруга. Для порушення ультразвукових коливань і використовується цей ефект. Таким чином, п’єзоелемент може використовуватися поперемінно то випромінювачем, то приймачем ультразвукових коливань.
Магнитострикційні випромінювачі ультразвуку використовують явище деформації феромагнітів у перемінному магнітному полі.
Пояснимо роботу ультразвукового датчика на прикладі ехолота - приладу для виміру глибини моря (мал. 57).
мал. 57
При подачі перемінної напруги на п’єзоелемент 1 збуджуються ультразвукові коливання, спрямовані вертикально вниз. Відбитий ультразвуковий імпульс сприймається п’єзоелементом 2. Електричний прилад 3 вимірює час t між що посилається і прийнятим імпульсами. Глибина моря пропорційна цьому часу і швидкості поширення звуку v у воді:
Н = v t/2
Шкала приладу градуюється безпосередньо в метрах. Аналогічно діє ультразвуковий локатор, що визначає відстань до перешкоди на шляху корабля в горизонтальному напрямку. Деякі тварини (наприклад, кажани і дельфіни) мають органи орієнтування, що діють за принципом ультразвукового локатора.
Ультразвукові коливання мають енергію значно більшу, ніж звукові, оскільки енергія пропорційна квадрату частоти. Крім того, порівняно просто здійснюється спрямоване випромінювання ультразвуку.
За допомогою ультразвукових датчиків виявляють дефекти в металевих деталях: тріщини у виробах, порожнині у виливках і т.д. Ультразвукові датчики відіграють важливу роль у дефектоскопії, у неруйнівних методах контролю. Крім того, ультразвукові датчики використовуються в приладах для виміру витрати, рівня, тиску.
11.2. Випромінювачі ультразвукових коливань
В ультразвукових електричних датчиках найбільше поширення одержали магнітострикційні і п'єзоелектричні випромінювачі, збуджувані за допомогою напівпровідникових і електронних генераторів, що виробляють змінну напругу з частотою більш 10 кГц. Часто застосовується й імпульсне збудження ультразвукових випромінювачів.
Магнітострикційний випромінювач стрижневого типу (мал.58, а) являє собою набір тонких аркушів з феромагнітного матеріалу, на який намотана обмотка збудження. Найчастіше в магнітострикційних випромінювачах використовується нікель і його сплави (інвар і монель), а також феррити. Форма пластини показана на мал.58, б.
мал. 58
Якщо стрижень з феромагнітного матеріалу знаходиться в перемінному магнітному полі, то він буде поперемінно стискуватися і розтискатися, тобто деформуватися. Тому що знак деформації не залежить від напрямку поля, то частота коливання деформації буде в два рази більше частоти перемінного збуджуючого поля.
Для одержання великих механічних деформацій використовують постійне підмагнічування стрижня, щоб працювати на найбільш крутій ділянці кривої.
Магнітострикційні випромінювачі працюють в умовах резонансу, коли частота збуджуючого поля збігається (налаштована в резонанс) з частотою власних пружних коливанні стрижня, що визначається по формулі
де l - довжина стрижня; Е - модуль пружності; - щільність матеріалу.
Для нікелевого стрижня довжиною l=100 мм частота власних коливань складає 24,3 кГц, амплітуда досягає приблизно 1мкм. Найвища частота, на якій ще вдається збудити досить інтенсивні коливання, складає 60 кГц, що відповідає довжині 40 мм. Крім основної частоти в стрижні можна збудити і коливання на вищих гармоніках (при відповідному кріпленні стрижня), але з меншою амплітудою.
У п'єзоелектричному випромінювачі ультразвукових коливань використовується пластина кварцу (мал. 59), до якої прикладене перемінна напруга Ux, що створює електричне поле в напрямку електричної осі X.
Подовжній зворотний пєзоэффект полягає в деформації пластини по осі X.
Поперечний зворотний пєзоэффект полягає в деформації пластини в напрямку механічної осі Y.
мал. 59
При напругах до 2,5 кВ зберігається пряма пропорційність між величиною деформації і напругою. При великих напругах деформація збільшується не настільки швидко і при U = 25 кВ виявляється на 30 % меншою. Амплітуда коливань досягає максимуму при рівності частоти прикладеної напруги і частоти власних коливань пластини.
У порівнянні з магнітострикційними п'єзоелектричні випромінювачі забезпечують значно більшу (на 1-2 порядки) частоту ультразвукових коливань.
11.3. Застосування ультразвукових датчиків
В ультразвукових рівнемірах і дефектоскопах використовується властивість ультразвуку відбиватися від границі двох середовищ. Співвідношення між енергіями відбитих і падаючих коливань називається коефіцієнтом відображення. Цей коефіцієнт дуже великий для середовищ, що істотно відрізняються по щільності і швидкості поширення звуку. Наприклад, коефіцієнт відображення на границі вода - сталь складає 88, а на границі вода - трансформаторна олія він дорівнює 0,6. Але навіть і при малих коефіцієнтах відображення отриманий відбитий сигнал цілком достатній для виміру положення рівня розділу двох середовищ.
Мірою рівня є час поширення коливань від джерела випромінювання до границі розділу і назад до приймача. Ці величини рівня і часу зв'язані між собою співвідношенням Н = t/2. Завдяки властивості ультразвукових коливань поширюватися в будь-яких пружних середовищах між випромінювачем і вимірюваним середовищем може знаходитися металева стінка, що дозволяє вести вимір без контакту вимірювальних елементів з контрольованим середовищем і без електричних вводів у резервуар.
В ультразвукових рівнемірах використовується в основному імпульсний режим передачі коливань у середовище. При цьому п’єзоэлемент може поперемінно працювати те випромінювачем, то приймачем ультразвуку.
Схема ультразвукового рівнеміра показана на мал.60.
мал 60.
Електричні високочастотні імпульси від генератора 2 подаються по кабелю до пєзоэлементу датчика 1, що випромінює ультразвукові коливання у вимірюване середовище. Ці коливання відбиваються від границі розділу середовищ і повертаються до п’єзоелементу, що перетворить їх в електричний сигнал. Цей сигнал підсилюється підсилювачем 3 і подається на вимірювальний пристрій 4, що визначає час між посилкою імпульсу генератором 2 і приходом імпульсу в підсилювач 3. У результаті багаторазового відображення посланого імпульсу можуть повернутися три-чотири сигналу, що убувають по амплітуді і запізнюються один щодо одного на однаковий час.
Частота імпульсів, що посилаються, повинна бути не занадто великою, щоб усі відбиті сигнали встигли повернутися до посилки наступного імпульсу. Ультразвукові рівнеміри забезпечують точність у 1 % при вимірах рівня в 5-10 м в умовах високої температури, високого тиску, великої хімічної активності контрольованого середовища. У повітрі ультразвукові коливання загасають у багато разів швидше, ніж у рідких (і взагалі в більш щільних) середовищах. Тому бажано розміщувати випромінювач та приймач знизу під резервуаром, а не зверху.
В ультразвуковому витратомірі використовується ефект додавання швидкості поширення ультразвуку в пружному середовищі зі швидкістю руху цього середовища.
Схема ультразвукового витратоміра показана на мал.61.
мал 61
П’єзоелементи 1 і 2 розташовуються уздовж трубопроводу і збуджуються від генератора 3 на частоті в кілька сотень кілогерців. Кожний з пєзоелементів поперемінно за допомогою перемикача 4 працює те випромінювачем, то приймачем. Таким чином, ультразвукові коливання посилаються то по потоці середовища, то назустріч йому. У першому випадку швидкості коливань і потоку складаються, у другому випадку - віднімаються.
Після проходження по середовищу сигнали, прийняті пьезоэлементами, підсилюються підсилювачем 5 і надходять поперемінно на вимірювальний пристрій 6. Різниця фаз прийнятих коливань буде пропорційна швидкості середовища. Градуювання приладу виконується для визначеного середовища. При використанні приладу для вимірів витрати середовища з іншим значенням швидкості поширення ультразвуку змінюється і градуїровка.
Слід зазначити, що вимірювальні датчик витрати схеми для ультразвукових датчиків досить складні.
12. СТРУННІ ДАТЧИКИ
12.1. Призначення і принцип дії
Для виміру неелектричних величин застосовується і частотний метод, при якому вимірювана величина перетвориться в перемінну напругу, частота якого залежить від цієї величини. Перевагою частотного методу виміру є те, що в процесі передачі і подальшої обробки частотного вихідного сигналу не виникає додаткова похибка. Дійсно, якщо вихідним сигналом датчика є напруга, то при передачі такого сигналу на відстань відбувається спадання напруги на проводах лінії зв'язку.
Якщо вихідним сигналом датчика є, наприклад, опір, то до нього додається опір проводів лінії зв'язку. А в частотному методі виміру наявність опору проводів лінії зв'язку і внутрішнього опору вимірювального приладу не змінюють частоту сигналу.
Ще одною перевагою частотного сигналу є зручність перетворення його в цифровий код. Це особливо важливо в зв'язку з розвитком останнім часом цифрових вимірювальних приладів і застосуванням в автоматиці цифрових обчислювальних машин.
Найбільший розвиток для перетворення неелектричних величин у частоту одержали струнні датчики. Принцип дії струнного датчика заснований на залежності власної частоти коливань натягнутої струни довжиною l і масою m від сили натягу F:
Струнні датчики використовуються в приладах для виміру сили, тиску, витрати, температури й ін. При впливі на струну вимірюваною силою струна практично не розтягується, тому первинний перетворювач (наприклад, мембрана в датчику тиску) працює, майже не деформуючи. Це обставина істотна знижує погрішність виміру через механічний гістерезис і пружну післядію матеріалу первинного перетворювача.
Струнний датчик (мал. 62) складається зі струни 1, збудника 2 і приймачі 3. Одним кінцем струна жорстко закріплена, а іншим кінцем з'єднана з первинним перетворювачем, наприклад мембраною 4 на мал.62.
При зміні тиску Р змінюється сила натягу струни. За допомогою збудника 2, яким може бути електромагніт, струна виводиться зі стану рівноваги і починає коливатися з частотою f, обумовленої тиском Р. Приймач 3 перетворить переміщення струни з частотою f в електричний сигнал такої ж частоти. Як приймач 3 може використовуватися індуктивний, ємнісний чи будь-який інший датчик.
мал.62
На практиці найчастіше застосовують електромагнітний датчик. Справа в тім, що він може поперемінно виконувати функції то збудника, то приймача. Коли на його обмотку подається напруга, то він створює електромагнітну силу притягання струни і збуджує її коливання. А коли струна вже коливається, то з цієї ж обмотки знімається перемінна напруга, частота якої дорівнює частоті коливань струни.
Струнні датчики використовуються в двох режимах: автогенераторному і в режимі роботи з запиту.
У першому випадку струна постійно коливається, а в другому - працює в більш легких умовах, термін служби її збільшується і датчик виходить трохи простішим.
12.2. Будова струнних датчиків
Для забезпечення необхідної точності, чутливості і надійності струнних датчиків необхідно вибрати відповідний матеріал струни. Цей вибір визначається як умовами застосування датчика, так і способом порушення коливань струни. До матеріалу струни пред'являються наступні вимоги: висока міцність при вібраційних навантаженнях, визначене значення температурного коефіцієнта лінійного розширення (або мале, або рівне цьому ж коефіцієнту конструкційного матеріалу датчика), незалежність пружних властивостей від часу і температури.
Можливе застосування як феромагнітних, так і неферомагнітних матеріалів струни. При використанні феромагнітної струни застосовуються електромагнітні збудники коливань.
Під дією струму, що протікає по обмотці нерухомого електромагніта, до струни прикладається сила притягання, що виводить її зі стану спокою. При використанні неферомагнітної струни застосовуються магнітоелектричні збудники коливань.
При пропусканні через струну струму вона піддається силі притягання (чи відштовхування) до полюсів постійного магніту.
Найбільше поширення в струнних датчиках з електромагнітним порушенням одержали сталеві струни з круглого рояльного дроту діаметром 0,1-0,3 мм. При довжині в 40-60 мм у таких струнах збуджуються коливання з частотою 700-2000 Гц.
Останнім часом використовуються більш гнучкі і більш надійному по кріпленню сталеві стрічки товщиною 0,08-0,1 мм і шириною 1-2 мм. Частота коливань сталевої стрічки досягає 3 кгц і вище. Сталеві струни і стрічки працюють у режимі заданої довжини. У цьому режимі струна кріпиться до відносно більш масивного пружного первинного перетворювача, виготовленому також зі сталі. Однаковий температурний коефіцієнт лінійного розширення матеріалу струни і матеріалу конструкції датчика дозволяє зменшити температурну погрішність.
У режимі заданої довжини струна дуже чуттєва до нестабільності кріплення, а при використанні неферомагнітних струн звичайно потрібно ізолювати хоча б один з кінців струни, що погіршує механічну стабільність кріплення. Тому неферомагнітні струни звичайно використовують у режимі заданої сили. Як матеріал застосовують берилієву бронзу, вольфрамові сплави, а також спеціальний залізокобальтовий сплав.
Струни з вольфрамових сплавів бувають як круглими, так і стрічковими.
Інші матеріали звичайно використовують у виді стрічок.
При виборі розмірів струни виходять з наступних суперечливих вимог. При малій довжині зменшуються габарити датчиків, підвищуються чутливість і вібростійкість. Однак при цьому збільшується похибка через недосконалість кріплення і впливу власної твердості струни. Для забезпечення малої погрішності від власної твердості варто прагнути до виконання умови l/d > 300500, де l - довжина струни, d - діаметр круглої чи товщина стрічкової струни. Звичайно не рекомендується вибирати довжину струни менш 20 мм. Перетин струни вибирається по необхідній межі зміни натягу і доцільній механічній напрузі в струні. Наприклад, для бронзи рекомендується вибирати напруга не більш 0,5 % від модуля пружності.
Конструкція і матеріал кріплення струни відіграють першорядну роль для забезпечення стабільності струнного датчика. При малих механічних напругах (до 200 Н/мм2) більш гарні результати дають способи кріплення, показані на мал.63.
Кріплення за допомогою гвинта (мал. 63, а) приводить до значного зминання струни і погіршенню стабільності. Більш гарні результати дає кріплення в щілині (мал.63, б). Стрічкові струни закріплюють між двома добре обробленими і підігнаними рівнобіжними площинами (мал.63, в). Таким же способом можна кріпити і круглі струни.
мал. 63.
За допомогою струнних датчиків можливо автоматичний вимір сили, тиску, переміщення, прискорення, температури й інших неелектричних величин. На базі струнних датчиків створені також цифрові електровимірювальні прилади постійного і змінного струму. Діапазон зміни вихідного сигналу - частоти- складає 300-500 Гц. Для виключення перешкод промислової частоти прагнуть збільшити мінімальне значення частоти.
Висока частота полегшує і перетворення її в цифровий код.
Наприклад, для одержання похибки дискретності рахунка, не перевищуючої 0,1%, при частоті в 1000 Гц досить робити рахунок імпульсів вихідного сигналу датчика протягом 1 с.
Найбільше поширення одержали струнні тензометри. Розглянемо схему виміру за допомогою струнного тензометра (мал.64).
мал. 64
У корпусі 1 закріплена струна 2, початковий натяг якої може встановлюватися за допомогою регулювального гвинта 3. Коливання струни збуджуються за допомогою електромагніта 4. Вихідний сигнал приймача 5, у якості якого використовується, наприклад, електромагнітний трансформаторний датчик, виміряється частотоміром.
У струнних тензометрах застосовуються струни довжиною 20-200 мм із початковою механічною напругою 300-400 Н/мм2 і максимальним до 800 Н/мм2.
13. ДАТЧИКИ ХОЛА І МАГНІТООПОРИ
13.1. Фізичні основи ефекту Хола й ефекту магнітоопору
Ефект Хола - це фізичне явище, що полягає в наступному. Розглянемо пластинку (мал. 4) із провідного матеріалу, уздовж якого проходить струм І. Якщо перпендикулярно площини пластинки і напрямку струму діє магнітне поле напруженістю Н, то в пластині виникає ЕРС, пропорційна і струму, і напруженості магнітного поля:
Е = К·І·Н
де К= kx/ d - коефіцієнт, що залежить від матеріалу і товщини пластини d; kx - постійна Хола.
Напрямок цієї ЕРС, що називається ЕРС Хола, перпендикулярно струму і полю, тобто її можна заміряти між бічними поздовжніми гранями пластини (мал.65) за допомогою електровимірювального приладу.
Причина появи ЕРС Хола в тім, що на заряди, що рухаються, у магнітному полі діє сила Лоренца. Струм у пластині - це і є упорядкований рух зарядів (у металі - електронів). Під дією магнітного поля вони зміщаються перпендикулярно напрямку свого руху і поблизу однієї подовжньої грані виникає надлишок зарядів, а поблизу іншої - недолік. У звичайних провідникових матеріалах ЕРС Хола дуже мала, що порозумівається малою швидкістю (точніше - рухливістю) носіїв струму через їхню велику концентрацію.
мал. 65
Хоча ефект Холу відомий уже більш ста років, практичне застосування його почалося лише в підсумку розвитку технології одержання напівпровідників. Саме в чистих напівпровідниках забезпечується висока рухливість носіїв струму, тому постійна Хола для чистих напівпровідників у багато разів більше, ніж для металів.
Ефект магнітоопору - це інше фізичне явище, що полягає в зміні опору провідних тіл у магнітному полі. Порозумівається це тим, що в присутності магнітного поля на носії струму діє сила Лоренца, що змінює траєкторію їхнього руху. Якби не було магнітного поля, то під дією прикладеного до провідного тілу напруги носії струму переміщалися б по найкоротшому напрямку. Зміна траєкторії під дією магнітного поля завжди подовжує шлях носіїв струму, що виявляється як збільшення опору.
У сильних поперечних магнітних полях деякі речовини можуть мати відносне збільшення опору =R/R у десятки разів. Найчастіше величина зв'язана з напруженістю магнітного полюя Н квадратичною залежністю
=kRH2
де k - коефіцієнт, що залежить від матеріалу і розмірів.
Ефекти Хола і магнітоопору використовуються в датчиках, за допомогою яких можуть бути вимірювані різні електричні і магнітні величини. Крім того, вони можуть використовуватися для математичної обробки електричних сигналів: додавання, множення, розподілу, зведення в квадрат і знаходження кореня; для різних перетворень електричних сигналів.
13.2. Матеріали для датчиків Хола і датчиків магнітоопорів
Використання датчиків Холу для цілей автоматичного виміру буде раціональним у тому випадку, якщо вони мають досить високу чутливість і мало піддані впливу температури.
Чутливість датчика залежить від вихідної ЕРС, тобто від постійної Хола, що, у свою чергу, визначається рухливістю носіїв струму. У провідних тілах носіями струму є електрони. При звичайних температурах електрони знаходяться в хаотичному тепловому русі з усілякими швидкостями.
Однак якщо уздовж тіла створити електричне поле Е, приклавши напругу U, то всі електрони почнуть пересуватися в напрямку поля з деякою середньою швидкістю v (при цьому окремі електрони можуть мати як більшу, так і меншу швидкості). Рухливість носіїв струму () визначається як відношення швидкості v до напруженості електричного поля Е:
= /E
Рухливість залежить від того, як часто електрон при своєму русі зіштовхується з ґратами твердого тіла. Слід особливо зазначити, що велике значення ЕРС Холу ще не означає, що в цій речовині великий ефект Холу і воно годиться для технічних застосувань. Велике значення ЕРС може бути отримане за рахунок великої напруги U, тобто великих витрат електричної енергії.
У той же час в іншому матеріалі така ж ЕРС Холу і ті ж швидкості носіїв струму можуть бути отримані при меншій напрузі тільки за рахунок більшої рухливості. Такий матеріал вигідніше для застосування в датчику Холу.
Коротше кажучи, основною вимогою, пропонованим до матеріалів для датчиків, є сполучення великої рухливості носіїв струму з мінімальними температурними залежностями.
У залежності від технології виготовлення розрізняють кристалічні (у формі пластинки) і плівкові датчики.
Як матеріал кристалічних датчиків використовуються різні з'єднання індію: мишяковистий індій ІnAs, фосфід індію ІnР, сурм'янистий індій ІnSb, а також германій Ge і кремній Sі.
Найбільше значення постійної Холу в матеріалу ІnSb, але воно сильно залежить від температури. Для германія постійна Холу в десятки разів менше, але він має значно більший питомий опір. З германія можна робити датчики з опором у кілька кілоом. Ще великим питомим опором володіє кремній, але його важче очистити від домішок. Високий ступінь очищення напівпровідникових матеріалів одержують при плавці в космічних лабораторіях.
Для розміщення у вузьких зазорах дуже зручні плівкові датчики Холу. Для їхнього виготовлення використовується метод випару у вакуумі вихідної речовини з наступним осадженням на підкладку зі слюди. Товщина плівкових датчиків складає 10-30 мкм, що в сотні разів менше, ніж у кристалічних датчиків.
Матеріалом для плівкових датчиків служать з'єднання ртуті: селенід ртуті HgSe і теллурид ртуті HgTe. Чим тонше плівка, тим менше постійна Холу. По своїх можливостях застосування в системах автоматики плівкові датчики приблизно рівноцінні з германиевими і навіть краще по температурній стабільності. Але вони дуже дорогі. В даний час проводяться дослідження нових матеріалів, придатних для використання в датчиках Холу і магнитоопору.
13.3. Застосування датчиків Хола і датчиків магнітоопору
Основне застосування датчики Хола і датчики магнітоопору знаходять для виміру магнітних полів. Вони застосовуються в дуже широкому діапазоні напруженості магнітного поля: від 1 до 109 А/м. З їхньою допомогою можна визначати криві намагнічування магнітних матеріалів, розподіл магнітних полів в електричних машинах і електромагнітних пристроях. При вимірах у сильних магнітних полях (Н > 107 А/м) ЕРС Холу складає десяті частки вольтів і може бути вимірювана вольтметром з великим внутрішнім чи опором за допомогою компенсаційної схеми.
Регулювання чутливості виробляється зміною напруги, що живить датчик. Для збільшення вихідного сигналу використовують послідовне з'єднання декількох датчиків Хола. При вимірах у середніх магнітних полях (103 А/м < Н< 107 А/м) потрібно посилення вихідної напруги датчика. При вимірах у слабких магнітних полях ( Н <105 А/м) використовують так називані концентратори магнітного полюя. У якості таких концентраторів використовують круглі довгі стрижні з вузьким зазором між ними, куди і міститься датчик. Стрижні виготовляють з матеріалів з високою магнітною проникністю найчастіше з пермаллоя. При довжині стрижнів у 1 метр, діаметрі 5 мм і зазорі в 0,3 мм можна одержати коефіцієнт підсилення магнітного поля в 1500 разів. Датчики Холу з концентраторами магнітного поля здатні відчувати напруженість магнітного полю в 0,1 А/м. З їхньою допомогою можна досліджувати навіть дуже слабке магнітне поле Землі. Однак треба відзначити, що виміру середніх і слабких магнітних полів за допомогою датчиків Холу поки доцільні лише в лабораторних, а не промислових умовах.
У середнім і слабкому магнітному полях датчики Холу дуже чуттєві до коливань температури і мають потребу в стабільному живленні і складних вимірювальних схемах. Наприклад, термо-е.р.с. між матеріалом датчика і його виводів порівнянна з вихідним сигналом.
Та й при вимірах у сильних магнітних полях використовують схеми термокомпенсації погрішності за допомогою терморезисторів, а часом навіть і термостатирувння, тобто виміри проводять у камері, де автоматично підтримується постійна температура.
Власне кажучи, датчик Холу є елементарним пристроєм, що множить, оскільки його вихідний сигнал пропорційний добутку напруженості на струм. На цьому, по суті, і засновані всі можливі застосування датчика Холу. При постійному струмі через датчик вихідний сигнал пропорційний напруженості магнітного полюя. А помістивши датчик у постійне магнітне поле можна вимірювати струм, що проходить через нього, за значенням ЕРС Хола. Це єдиний спосіб визначення розподілу струмів в електролітичних ваннах.
Датчики магнітоопору також спочатку використовувалися для виміру магнітних полів, але потім були витиснуті більш досконалими датчиками Хола на нових напівпровідникових матеріалах.
Однак датчики магнітоопору по будові простіше датчиків Хола. Найкращою формою для датчика магнітоопору є диск з одним виводом у центрі й іншим - на окружності. Основним достоїнством датчика магнітоопору є можливість безконтактної зміни активного опору. Одним з можливих застосувань датчиків магнітоопору є створення безконтактних клавішних вимикачів. При натисканні на кнопку такого вимикача переміщається магніт і змінюється магнітний потік, що впливає на датчик магнітоопору.
Відомі також застосування датчиків Холу і магнітоопору в системах автоматики як вимірники струму в струмоведучих шинах, безконтактних потенціометрів для перетворення механічного переміщення (лінійного чи кутового) у пропорційний електричний сигнал. Зручно застосовувати датчики Холу в автоматичних пристроях, що контролюють стан сталевих канатів.
Поки ще датчики Холу і датчики магнітоопору порівняно мало застосовуються в системах промислової автоматики. Але бурхливий розвиток напівпровідникової технології веде до розширення їхнього застосування.
Слід зазначити, що останнім часом до таких датчиків додалися ще і близькі за принципом дії магнитодіодні і гальваномагнітно-рекомбінаційні перетворювачі.
ЛІТЕРАТУРА
- Теорія автоматичного керування М.Г.Попович О.В.Ковальчук
Київ "Либідь" 2007
- Анхимюк В.Л.Теория автоматического управления.2010.
- Бесекерский В.А.Теория систем автоматического управления.2003.
- Буль Б.К. - Электромеханические аппараты автоматики (2008).
- Воронов А.А.Основы теории автоматического регулирования и управления.2007.
- Виглеб Г. Датчики. Устройство и применение.2009.
- Келим Ю.М.Типовые элементы систем автоматического управления.2002.
- Колосов С.П. Элементы автоматики.1970.
- Олссон Г.Цифровые системы автоматизации и управления.2001.
- Орнатский П.П. Автоматические измерения и приборы.1986.
- Тюкин В.Н.Теория управления.2010.Ч1.
- Хрущев В.В.Электрические машины систем автоматики.1985.
- Электронная техника в автоматике. Под ред.Ю.И.Конева.1986.
PAGE 1
Електричні датчики