Расчёт элементов и характеристик реверсивного электропривода постоянного тока по системе управляемый выпрямитель – двигатель (УВ-Д)
Министерство образования Российской Федерации
ИВАНОВСКИЙ ГОСУДАРСТВЕННЫЙ ЭНЕРГЕТИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра электропривода и автоматизации промышленных установок
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по курсу
Теория электропривода
Тема проекта: Расчёт элементов и характеристик
реверсивного электропривода постоянного тока по
системе “управляемый выпрямитель – двигатель (УВ-Д)”
Автор проекта __________ Андреев А.С.
подпись Ф.И.О.
Группа IV-31
Руководитель проекта _________ Спичков Ю.П.
подпись Ф.И.О.
Иваново 2003
Вариант №11
1. Исходные данные
1.1. Тип двигателя и его основные параметры.
- Тип двигателя – П-42.
- Номинальное напряжение, Uн.дв .= 220 (В).
- Номинальная скорость вращения двигателя, nн=1500 (об/мин).
- Номинальная мощность, Pн = 4.5 (кВт).
- Номинальный ток, Iн.дв.= 25.1 (А).
- Номинальный момент, Mн = 2.92 (кгм) = (Нм).
- Номинальный К.П.Д., н=80.3 %.
- Максимальная скорость при ослаблении поля, nм=3000 (об/мин).
- Маховый момент, GD2 = 0.18 (кгм2).
- Допустимая кратность пускового тока, Iп/Iн = 2.
- Число полюсов, 2p = 4.
- Число витков обмотки якоря, Wя=341.
- Сопротивление обмотки якоря при 15С, Rя=0.34 (Ом).
- Число параллельных ветвей обмотки якоря, 2a=2.
- Сопротивление добавочных полюсов при 15С, Rд=0.21 (Ом).
- Число витков на полюс последовательной обмотки, Wс=10.
- Сопротивление последовательной обмотки при 15C, Rc=0.0382 (Ом).
- Число витков на полюс параллельной обмотки, Wш=1500.
- Сопротивление параллельной обмотки при 15С, rш=172 (Ом).
- Параметры силового преобразователя
- Схема выпрямления – Однофазная мостовая.
- Способ управления вентильными группами преобразователя – раздельное.
- Напряжение питающей сети и отклонения напряжения, UcU=380 5% (В).
- Допустимая амплитуда пульсаций тока в якорной цепи двигателя, Iп/Iн=0.06.
- Пределы изменения нагрузки на валу двигателя, Mс/Mн=0.25-1.0.
- Значение тока упора, Iуп/Iя=2.3.
2. Описание работы системы электропривода в соответствии с его функциональной схемой и назначение входящих в неё элементов.
2.1. Функциональная схема силового преобразователя.
Функциональная схема силового однофазного мостового симметричного преобразователя приведена на рис.1.
Рис. 1. Функциональная схема силового однофазного мостового
симметричного преобразователя.
2.2. Краткое описание работы системы электропривода в соответствии с его функциональной схемой.
Схема однофазного мостового выпрямителя содержит выпрямительный мост из четырёх вентилей. В группе слева вентили соединены катодами (катодная группа), а в группе справа – анодами (анодная группа). Нагрузка подключается между точками соединения катодов и анодов вентилей. В мостовом выпрямителе (при ra=0, La=0, Ld=0) одновременно пропускают ток два тиристора: один – с наиболее высоким потенциалом анода относительно нулевой точки трансформатора из катодной группы тиристоров, другой – с наиболее низким потенциалом катода из анодной группы тиристоров. Таким образом, выпрямленное напряжение имеет двукратные пульсации, хотя угол проводимости каждого тиристора =2.
Так как во вторичной обмотке трансформатора постоянная составляющая тока отсутствует, то особенностью работы однофазного мостового управляемого выпрямителя будет являться отсутствие вынужденного намагничивания сердечника трансформатора.
Также, в связи с тем, что при изменении угла регулирования происходит сдвиг во времени первой гармоники потребляемого из сети тока (тока в первичной обмотке трансформатора) I(1)1 относительно напряжения питания управляемый выпрямитель потребляет из сети реактивную мощность даже при чисто активной нагрузке.
2.3. Описание элементов, входящих в схему силового преобразователя.
Основной функцией силового согласующего трансформатора в системе электропривода УВ-Д является согласование напряжения питающей сети с напряжением подключаемого к преобразователю двигателя постоянного тока.
Вентили служат для регулирования величины напряжения якоря двигателя постоянного тока (ДПТ) и, соответственно, для регулирования скорости вращения двигателя.
Сглаживающий дроссель в цепи нагрузки силового преобразователя с индуктивностью Lдр служит для уменьшения пульсаций выпрямленного тока и уменьшения зоны прерывистых токов в якорной цепи ДПТ.
3. Расчёт параметров и выбор силового согласующего трансформатора
3.1. Расчёт значения фазного напряжения вторичной обмотки трансформатора U2ф.
Расчёт ведётся по следующей формуле ([1], стр. 5):
,
где Uн.дв. – номинальное напряжение двигателя;
Kсх – коэффициент схемы, зависящий от схемы преобразователя. В соответствии с [1], табл. 2 принимаем Kсх=0.9;
K – коэффициент, учитывающий неполное открытие тиристоров при максимальной скорости двигателя, для нереверсивных схем и реверсивных с раздельным управлением, не предъявляющих повышенных требования в отношении быстродействия систем автоматического поддержания скорости принимаем равным 1, K=1.
Kг – Коэффициент, учитывающий падение напряжения в силовой цепи, принимается в пределах 1.051.15. Принимаем Kг=1.1;
Kс – коэффициент, учитывающий возможное снижение напряжения в силовой цепи. Данный коэффициент рассчитывается по следующей формуле ([1], стр. 6):
,
где U1н – напряжение питающей сети;
U1 – возможное отклонение напряжения питающей сети, %.
Тогда получим:
(В).
3.2. Расчёт значения фазного тока вторичной обмотки трансформатора I2ф.
Расчёт ведётся по следующей формуле ([1], стр. 6):
,
где Iн.дв. – значение номинального тока двигателя;
Ki2 – коэффициент, определяемый схемой выпрямления и схемой соединения
обмоток трансформатора. В соответствии с [1], табл. 2 принимаем Ki2=1.11;
Ki – коэффициент, учитывающий отклонение формы тока от прямоугольной, принимается в пределах 1.051.1. Принимаем K=1.075.
Тогда получим:
(А).
3.3. Расчёт необходимого коэффициента трансформации Kтр.
Расчёт ведётся по следующей формуле ([1], стр. 6):
3.4. Расчёт значения фазного тока первичной обмотки трансформатора I1ф.
Расчёт ведётся по следующей формуле ([1], стр. 7):
,
где Ki1 – коэффициент, определяемый схемой выпрямления. В соответствии с [1], табл. 2 принимаем Ki1=1.11;
тогда
(А).
3.5. Расчёт типовой мощности силового согласующего трансформатора Sтр.
Расчёт ведётся по следующей формуле ([1], стр. 7):
,
где Ks – коэффициент, учитывающий схему выпрямления. В соответствии с [1], табл. 2 принимаем Ks=1.23;
Pd0 – наибольшее значение мощности, потребляемой нагрузкой.
(Вт);
тогда:
(Вт)(кВт).
3.6. Выбор силового согласующего трансформатора.
Мощность трансформатора выбирается из условия:
В соответствии с полученными величинами Sтр н, U2ф, I2ф и I1ф по [1], табл. 3 выбираем трансформатор типа ОС–15 со следующими каталожными параметрами:
- Номинальная мощность, Sтн ………………………………………………………………………………………………………………………………………………. 15 (кВА)
- Номинальное напряжение первичной обмотки ……………………………………………………………………………….. 380 (В)
- Номинальное фазное напряжение вторичной обмотки (заказывается на заводе-изготовителе) ……………………………………………………………………………………………………………………………………………………………….. 311.345 (В)
- Потери холостого хода, Pxx ……………………………………………………………………………………………………………………………………………….. 180 (Вт)
- Потери короткого замыкания, Pкз …………………………………………………………………………………………………………………….……. 460 (Вт)
- Напряжение короткого замыкания, Uкз ……………………………………………………………………………………………………..………………. 4.5 %
- Ток холостого хода, Iхх ………………………………………………………………………………………………………………………………………………………………………………… 7 %
- Коэффициент полезного действия, ……………………………………………………………………………………………………………………………….. 94 %
- Масса …………………………………………………………………………………………………………………………………………………………………………………………………………………………………… 160 (кг).
3.7. Определение реактивного Xтр и активного Rтр сопротивлений трансформатора.
Расчёт ведётся по следующим формулам ([1], стр. 7):
(Ом).
,
где m – число фаз трансформатора.
(Ом);
3.8 Расчёт индуктивности обмоток трансформатора Lтр.
(Гн).
4. Выбор вентилей силового преобразователя
Выбор вентилей производят по допустимому среднему значению тока через вентиль и максимальному допустимому значению обратного напряжения с учётом возможных перегрузок по току и возможных повышений обратного напряжения.
4.1. Расчёт среднего значения тока через вентиль Iv.ср..
Расчёт ведётся по следующей формуле ([1], стр. 8):
,
где Kvi – коэффициент среднего тока вентиля в конкретной схеме выпрямления. Выбирается в соответствии с [1], табл. 2. Принимаем Kvi=0.5;
Kнс – коэффициент, учитывающий неравномерность распределения тока по фазам преобразователя, зависящий от точности работы системы управления. Принимаем Kнс=1.1 (при допуске на несимметрию углов управления по фазам равном 3);
тогда
(А).
4.2. Расчёт значения номинального тока в предполагаемых условиях охлаждения тиристора Iv.ном..
Расчёт ведётся по следующей формуле ([1], стр. 8):
,
где K0 – коэффициент условий охлаждения. Принимаем K0=3.0 (при естественном охлаждении вентилей на комплектных или усиленных радиаторах;
тогда
(А).
4.3. Расчёт значения обратного напряжения Uпов.
Расчёт ведётся по следующей формуле ([1], стр. 8):
,
где Kп – коэффициент повторяющихся перенапряжений за счёт переходных процессов при включении и отключении тиристоров. Принимаем Kп=1.25;
KHV – коэффициент обратного напряжения в соответствии со схемой
преобразователя. Выбирается в соответствии с [1], табл. 2. Принимаем KHV=1.57;
тогда:
(В) (Класс 6).
4.4. Выбор вентилей по полученным значениям номинального тока в предполагаемых условиях охлаждения тиристора Iv.ном и обратного напряжения Uпов.
По [1], табл. 4 выбираем вентили типа Т-161-125-6 со следующими каталожными параметрами:
- Амплитудные значения прямого Uпр.m. и обратного Uоб.m. напряжений ………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………… 600 (В)
- Максимально допустимый средний ток Iср.m. ……………………………………………………………………………………… 125 (А)
- Действующий ток Iд …………………………………………………………………………………………………………………………………………………………….………………… 196 (А)
- Пороговое напряжение U0 ………………………………………………….…...………………………………………………………………………………………………… 1.15 (В)
- Дифференциальное сопротивление в открытом состоянии, r ……….……………. 1.8 (мОм)
- Критическая скорость нарастания тока, ………………………………………………...……………..80 (А/мкс)
- Критическая скорость нарастания напряжения …………… ……500 (В/мкс)
- Тип охладителя …………………………………………….…...……………………………………………………………………………………………………………………………………………… 0171-80
- Значение Iср.m. при естественном охлаждении при Tс=40С ………………………………………… 45 (А).
5. Расчёт индуктивности сглаживающего дросселя
5.1. Расчёт индуктивности сглаживающего дросселя L1 из условия допустимого уровня пульсаций выпрямленного напряжения.
Расчёт ведётся по следующей формуле ([1], стр. 9):
,
где (В) – амплитуда первой гармоники напряжения нагрузки ([1], стр. 9);
k=1 – кратность гармоники;
mв=2– число коммутаций тока за один период питающей сети;
(А) – допустимое максимальное значение уровня пульсаций выпрямленного тока;
тогда
(Гн).
5.2. Расчёт индуктивности сглаживающего дросселя L2 из условия ограничения зоны прерывистого тока значением минимального момента сопротивления.
Расчёт ведётся по следующей формуле ([1], стр. 10):
,
где – ток якоря, соответствующий минимальному моменту нагрузки;
CM – конструктивная постоянная двигателя, которая находится по следующему соотношению:
,
где
(Ом) – сопротивление якорной цепи
двигателя, приведённое к рабочей температуре двигателя 75С;
н – номинальная скорость вращения ротора двигателя, рассчитываемая по
следующему выражению:
(рад/с);
тогда
(Вс),
и
(А);
тогда неравенство для расчёта индуктивности сглаживающего дросселя принимает следующий вид:
(Гн).
5.3. Расчёт индуктивности сглаживающего дросселя Lдр.
Расчёт индуктивности ведём по большему из полученных значений расчётных индуктивностей сглаживающего дросселя в пунктах 5.1. и 5.2., то есть по значению индуктивности L2.
Скорректируем это значение на величину уже имеющейся в цепи тока индуктивности, воспользовавшись следующем выражением:
,
где n – количество фазных обмоток трансформатора, находящихся одновременно в цепи тока нагрузки. Для однофазной мостовой схемы n=1;
LЯ – индуктивность обмотки якоря, которая находится по следующей формуле:
,
где p = 2 – число пар полюсов двигателя;
- коэффициент, равный для компенсированных машин 0.1 0.25. Примем =0.2;
тогда
(Гн);
и
(Гн).
5.4. В соответствии с полученным значением индуктивности Lдр по каталожным данным выбираем дроссель так, чтобы выполнялись следующие условия:
По [1], табл. 5. выбираем дроссель типа ДС – 50/0.6 со следующими техническими параметрами:
- Номинальный ток, Iн.др. ……………………………………………………………………………………………………………………………………………………………………… 50 (А)
- Индуктивность дросселя, Lдр ………………………………………………………………………………………………………………………………………… 0.6 (Гн)
6. Расчёт регулировочной характеристики преобразователя
6.1. Расчёт и построение регулировочной характеристики преобразователя Ud().
Построение регулировочной характеристики преобразователя производится по следующему выражению:
,
где (В) – среднее значение напряжения холостого хода преобразователя;
- угол регулирования;
тогда окончательно выражение для построения регулировочной характеристики принимает следующий вид:
.
Рассчитаем регулировочную характеристику преобразователя на интервале от 0 до 90 и занесём результаты расчёта в таблицу 1.
Таблица 1
Регулировочная характеристика преобразователя.
|
, град. |
0 |
10 |
20 |
30 |
|
Ud(), В |
280.211 |
275.953 |
263.312 |
242.669 |
|
40 |
50 |
60 |
70 |
80 |
90 |
|
214.654 |
180.116 |
140.105 |
95.838 |
48.658 |
0 |
График регулировочной характеристики преобразователя приведён на рис. 2.
6.2. Расчёт и построение зависимости среднего выпрямленного напряжения UЯ() на якоре двигателя от угла регулирования при известном значении тока нагрузки.
Расчёт и построение зависимости среднего выпрямленного напряжения UЯ() на якоре двигателя от угла регулирования при известном значении тока нагрузки производится по следующему выражению:
,
где R - внутреннее суммарное активное сопротивление преобразователя, находящееся по следующему выражению:
,
где Rдр– активное сопротивление сглаживающего дросселя.
Принимаем
(Ом);
n1 = 1 – число фазных обмоток трансформатора, находящихся одновременно в цепи тока нагрузки;
n2 = 1 – число дросселей находящихся одновременно в цепи тока нагрузки, соответственно;
тогда
(Ом);
U - среднее значение коммутационного падения напряжения за период, в течении которого происходит mв коммутаций тока. Тогда, для однофазной мостовой схемы имеем:
(В);
U – прямое падение напряжения на вентилях преобразователя, составляющее 1 2 (В) для каждого вентиля. Принимаем U=1.5 (В).
Тогда окончательно выражение для расчёта зависимости среднего выпрямленного напряжения UЯ() на якоре двигателя от угла регулирования при известном значении тока нагрузки принимает следующий вид:
.
Рассчитаем зависимость среднего выпрямленного напряжения UЯ() на якоре двигателя от угла регулирования при известном значении тока нагрузки на интервале от 0 до 90 и занесём результаты расчёта в таблицу 2.
Таблица 2
Зависимость среднего выпрямленного напряжения UЯ() на якоре двигателя от угла
регулирования при известном значении тока нагрузки.
|
, град. |
0 |
10 |
20 |
30 |
|
UЯ(), В |
248.317 |
244.059 |
231.418 |
210.775 |
|
40 |
50 |
60 |
70 |
80 |
90 |
|
182.760 |
148.222 |
108.211 |
63.944 |
16.764 |
-31. |
График зависимости среднего выпрямленного напряжения UЯ() на якоре двигателя от угла регулирования при известном значении тока нагрузки приведён на рис. 2.
Рис.2. Зависимости и .
6.3. Нахождение приближенным графическим методом значений минимального угла регулирования min, при котором двигатель развивает номинальную скорость и максимального угла регулирования max, при котором напряжение якоря двигателя равно нулю.
По графикам зависимостей и находим искомые значения углов min и max:
7. Расчёт семейства электромеханических характеристик электропривода
Построение электромеханических характеристик электропривода (I) выполняем по следующему выражению:
.
Подставив в это выражения численные значения получим окончательный вид уравнения для расчёта электромеханических характеристик электропривода:
Подставляя в полученное выше выражение различные значения угла регулирования в пределах от min до max, получаем семейство электромеханических характеристик электропривода.
Электромеханические характеристики электропривода представлены на рис.3.
Рис. 3. Семейство электромеханических характеристик электропривода (I).
8. Определение минимального угла инвертирования и предельной величины тормозного тока
В инверторном режиме для обеспечения надёжной коммутации (исключения аварийного режима “опрокидывания” инвертора), необходимо, чтобы угол регулирования был больше суммы интервала коммутации и угла восстановления запирающих свойств тиристора , т.е. + = min.
8.1. Определение угла восстановления запирающих свойств тиристора .
Значение угла определим по следующей формуле:
,
где t3 – время восстановления запирающих свойств тиристора; примем
t3 = 8010-6(с);
тогда
.
8.2. Определение интервала коммутации при угле регулирования min=25.000.
Для определения значения воспользуемся следующим выражением:
.
8.3. Найдём минимальное значение угла регулирования min.
.
8.4. Найдём диапазон изменения величины тока якоря двигателя.
(А);
(А).
8.5. Найдём величину максимально допустимой скорости по условиям коммутации к max.
Значение максимально допустимой скорости по условиям коммутации к max может быть найдено из уравнения электромеханической характеристики привода в режиме рекуперативного торможения. Выражение для расчёта к max имеет следующий вид:
,
где (Ом);
тогда выражение для нахождения к max принимает следующий вид:
. (8.5.1.)
8.6. Порядок определения предельных скоростей к max в зависимости от величины тока якоря I.
- Задаёмся рядом значений тока якоря I от до и определяем соответствующее значение min согласно следующему выражению:
.
- Для соответствующих значений тока якоря I <0 и минимально допустимого по условиям коммутации угла регулирования min по формуле (8.5.1.) рассчитываем значения максимально допустимых скоростей к max.
Данные расчётов к max по описанной выше методике сведём в таблицу 3.
Таблица 3
Значение максимально допустимых скоростей из условий коммутации к max.
|
-I, А |
55.2 |
49 |
42 |
35 |
28 |
21 |
14 |
7 |
1.267 |
|
min, град |
19.724 |
18.573 |
17.184 |
15.667 |
14.013 |
12.128 |
9.897 |
6.994 |
2.974 |
|
кmax, рад/c |
120.605 |
131.724 |
144.278 |
156.832 |
169.385 |
181.939 |
194.493 |
207.047 |
217.329 |
Графики зависимостей min(I) и к max(I) приведены на рис. 4.
Рис. 4. Графики min(I) и к max(I).
9. Расчёт энергетических показателей электропривода для токов якоря двигателя равных 0. 2Iн.дв., 0.5Iн.дв. и 1.0Iн.дв..
Расчёт энергетических показателей электропривода для различных значений угла регулирования тиристорного преобразователя будем выполнять в соответствии со следующими зависимостями:
9.1. Скорость двигателя .
.
9.2. Интервал коммутации тиристорного преобразователя .
.
9.3. Относительная величина потребляемой активной мощности P*.
.
9.4. Относительная величина потребляемой реактивной мощности Q*.
.
9.5. Относительная величина потребляемой полной мощности S*.
,
где K1=1.06, K2=0.66 – коэффициенты, соответствующие схеме преобразователя ([1], табл. 2).
9.6. Коэффициент мощности преобразователя KM.
.
9.7. Коэффициент полезного действия преобразователя .
.
9.8. Рассчитаем необходимые величины энергетических показателей электропривода при различных заданных I и занесём результаты расчёта в следующие таблицы:
Таблица 4
Энергетические показатели электропривода для тока якоря I=0.2Iн.дв.=5.02(A).
|
, град. |
25.000 |
35 |
45 |
55 |
65 |
75 |
83.350 |
|
, град. |
1.41 |
1.052 |
0.858 |
0.743 |
0.673 |
0.632 |
0.615 |
|
, рад/c |
191.193 |
172.053 |
147.448 |
118.125 |
84.974 |
49.004 |
17.598 |
|
P* |
0.901 |
0.814 |
0.702 |
0.568 |
0.417 |
0.253 |
0.110 |
|
Q* |
0.434 |
0.581 |
0.712 |
0.823 |
0.909 |
0.967 |
0.994 |
|
S* |
1.096 |
1.099 |
1.101 |
1.103 |
1.103 |
1.104 |
1.104 |
|
KM |
0.822 |
0.740 |
0.673 |
0.515 |
0.378 |
0.230 |
0.100 |
|
0.976 |
0.974 |
0.969 |
0.962 |
0.949 |
0.916 |
0.813 |
Таблица 5
Энергетические показатели электропривода для тока якоря I=0.5Iн.дв.=12.55(A).
|
, град. |
25.000 |
35 |
45 |
55 |
65 |
75 |
83.350 |
|
, град. |
3.402 |
2.583 |
2.123 |
1.846 |
1.675 |
1.618 |
1.537 |
|
, рад/c |
179.444 |
160.304 |
135.699 |
106.375 |
73.225 |
37.255 |
5.848 |
|
P* |
0.893 |
0.806 |
0.694 |
0.560 |
0.409 |
0.245 |
0.102 |
|
Q* |
0.449 |
0.593 |
0.720 |
0.828 |
0.912 |
0.969 |
0.995 |
|
S* |
1.075 |
1.084 |
1.089 |
1.091 |
1.093 |
1.094 |
1.094 |
|
KM |
0.830 |
0.744 |
0.637 |
0.513 |
0.374 |
0.224 |
0.094 |
|
0.94 |
0.934 |
0.923 |
0.906 |
0.872 |
0.791 |
0.532 |
Таблица 6
Энергетические показатели электропривода для тока якоря I=1.0Iн.дв.=25.1(A).
|
, град. |
25.000 |
35 |
45 |
55 |
65 |
75 |
83.350 |
|
, град. |
6.466 |
5.022 |
4.175 |
3.653 |
3.330 |
3.143 |
3.070 |
|
, рад/c |
159.861 |
140.722 |
116.117 |
86.796 |
53.912 |
17.672 |
-13.734 |
|
P* |
0.88 |
0.792 |
0.680 |
0.547 |
0.396 |
0.232 |
0.089 |
|
Q* |
0.472 |
0.608 |
0.732 |
0.837 |
0.918 |
0.972 |
0.996 |
|
S* |
1.043 |
1.058 |
1.067 |
1.073 |
1.076 |
1.078 |
1.079 |
|
KM |
0.843 |
0.749 |
0.638 |
0.51 |
0.468 |
0.215 |
0.083 |
|
0.88 |
0.868 |
0.847 |
0.811 |
0.744 |
0.581 |
0.064 |
10. Расчёт электромеханической характеристики электропривода с задержанной обратной связью по току
Функциональная схема тиристорного электропривода с задержкой обратной связи по току (с отсечкой по току) приведена на рис. 5.
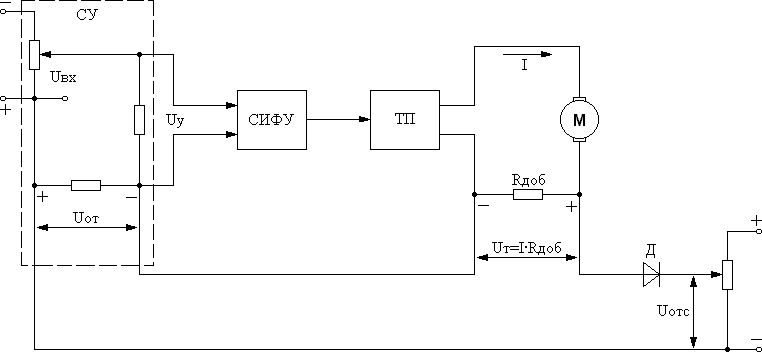
Рис. 5. Функциональная схема тиристорного электропривода с задержкой обратной связи по току.
10.1. Расчёт тока упора Iуп. и выбор тока отсечки Iотс..
(А).
Примем значение тока отсечки Iотс.=1.8Iн.дв.=1.825.1=45.18(А).
10.2. Нахождение коэффициента усиления системы KП.
При синусоидальном входном напряжении имеем:
,
где UОП – опорное напряжение. Примем UОП=12(В). Тогда
.
10.3. Нахождение величины добавочного сопротивления Rдоб. и напряжения Uотс..
Расчёт выполняется по следующей формуле ([1], стр. 17):
,
где Uзад. – постоянное напряжение задания.
Примем Uзад.=10(В). Тогда
(Ом);
тогда:
(В).
10.4. Построение электромеханической характеристики электропривода с задержанной обратной связью по току.
Построение характеристики производится по следующим выражениям:
При : ;
при :
.
Электромеханическая характеристика электропривода с задержанной обратной связью по току приведена на рис. 6.
Рис. 6. Электромеханическая характеристика электропривода с задержанной обратной связью по току.
11. Расчёт переходных процессов в электроприводе при прямом и управляемом пуске
Для получения графиков переходных процессов в электроприводе воспользуемся средой моделирования электромеханических процессов МИК-АЛ. Тогда структурная схема ДПТ для моделирования в графической среде МИК-АЛ будет иметь вид, представленный на рис. 7.
Рис. 7. Структурная схема ДПТ для моделирования в графической среде МИК-АЛ.
На этом рисунке:
11.1. Прямой пуск двигателя на номинальное напряжение Uн.дв.=220(В).
При прямом пуске двигателя блок формирования напряжения якоря двигателя будет выглядеть следующим образом:
Переходные процессы при прямом пуске ДПТ приведены на рис. 8.
Рис. 8. Переходные процессы скорости и тока якоря I в ДПТ при прямом пуске.
11. 2. Управляемый пуск ДПТ при плавном возрастание напряжения якоря.
При данном режиме пуска двигателя блок формирования напряжения якоря будет выглядеть следующим образом:
Переходные процессы при управляемом пуске ДПТ приведены на рис. 9.
Рис. 9. Переходные процессы скорости , тока якоря I и график изменения напряжения якоря двигателя U в ДПТ при управляемом пуске.
11.3. Выводы о целесообразности применения управляемого пуска.
Анализируя приведённые выше графики переходных процессов в ДПТ при различных режимах пуска можно выделить существенное преимущество регулируемого пуска перед прямым пуском:
- при регулируемом пуске значительно снижается величина пускового броска тока якоря. Причём, варьируя скорость пуска двигателя можно добиться значительного снижения пусковых бросков тока. Так, например, используя режим управляемого пуска двигателя можно добиться практически двукратного снижения пускового броска тока при неизменной скорости разгона двигателя;
- важным недостатком данного вида пуска является относительная сложность пусковых установок.
12. Список использованной литературы
- Методические указания к курсовому проекту на тему “Расчёт элементов и характеристик реверсивного электропривода постоянного тока по системе УВД”.
- Руденко В.С., Сенько В.И., Чиженко И.М. Основы преобразовательной техники. –М.: Высш. Шк., 1980 – 424с. с ил.
- Вешеневский С.Н. Характеристики двигателей в электроприводе. Изд. 6-е, исправленное. М., “Энергия”, 1977. 432с. с ил.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
2
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
3
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
4
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
ист
5
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
6
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
7
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
8
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
9
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
10
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
11
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
12
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
13
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
14
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
15
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
16
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
17
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
18
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
19
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
20
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
21
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
22
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
23
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
24
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
25
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
26
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
27
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
28
ИГЭУ.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
29
ИГЭУ.