ОСНОВЫ ТЕОРИИ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Контрольная работа
ОСНОВЫ ТЕОРИИ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Содержание
1 Виды помех и способы их создания
1.1. Способы снижения эффективности применения радио- и оптико-электронных средств
1.2 Помехи и их влияние на функционирование радиоэлектронных средств
1.3. Энергетические соотношения в условиях свободного пространства. ЭПР. Уравнение радиолокации
1.4. Классификация и краткая характеристика организованных радиопомех
1.5. Математическое описание помеховых сигналов
1.6. Особенности воздействия на радиоэлектронные средства помеховых сигналов различного вида
2. Формирование сигналов в передатчиках радиопомех
2.1. Построение передатчиков прямошумовых радиопомех
2.2 Принципы построения передатчиков шумовых радиопомех с амплитудной модуляцией
2.3. Построение передатчика шумовых радиопомех с фазовой модуляцией
2.4. Построение передатчика шумовых радиопомех с частотной модуляцией
2.5. Принцип действия передатчика хаотических импульсных радиопомех
2.6. Принцип действия передатчика многократных ответных импульсных радиопомех
3. Оценка эффективности РЭП
3.1. Эффективность функционирования РЭС в условиях РЭП
3.2 Оперативно-тактические критерии эффективности РЭП
3.3. Энергетический критерии эффективности РЭП
3.4. Информационный критерий эффективности РЭП
4. Уравнение радиоэлектронного подавления для активной радиолокации
4.1. Общее уравнения РЭП
4.2 Определение зоны подавления РЛС и ее границ из уравнения РЭП
5 Активные радиопомехи радиолокационным системам обнаружения целей
5.1. Краткая характеристика радиолокационных систем обнаружения воздушных целей
5. Радиоэлектронное подавление активными радиопомехами некогерентных импульсных РЛС
5.3. Радиоэлектронное подавление активными радиопомехами РЛС с внутриимпульсной модуляцией
5.4. Радиоэлектронное подавление активными радиопомехами РЛС с квазинепрерывным излучением
6. Активные помехи РЛС, работающим в режиме автосопровождения целей
6.1. Задачи, решаемые созданием помех РЛС АСЦ
6.2 Некогерентные радиоэлектронные помехи из двух точек пространства
6.3. Мерцающие помехи системам АСН
6.4. Кроссполяризационные радиоэлектронные помехи системам АСН
6.5. Когерентные радиоэлектронные помехи системам АСН из двух точек пространства
6.6. Особенности подавления систем АСН многоцелевых РЛС
6.7. Радиоэлектронные помехи системам АСД
7. Радиоэлектронное подавление систем военного назначения с помощью компьютерных вирусов и электромагнитного оружия
7.1. Общие понятия о компьютерных вирусах и их основные свойства
7.2 Реализуемость компьютерного РЭП
7.3. Защита от компьютерного РЭП
7.4. Общие понятия об электромагнитном оружии
7.5. Пути проникновения электромагнитного импульса в радиоэлектронную аппаратуру
7.6. Реализация электромагнитного оружия
7.7. Тактика применения электромагнитного оружия
7.8. Защита от электромагнитного оружия
Литература
1 Виды помех и способы их создания
1.1. Способы снижения эффективности применения радио- и оптико-электронных средств
Эффективность ведения разведки РЭБ [4] в значительной степени зависит от эффективности функционирования РЭС. В связи с этим уделяется большое внимание разработке и совершенствованию различных средств и способов борьбы с РЭС противника, исключающих или затрудняющих возможность их применения по боевому предназначению.
Эффективность применения РЭС может быть снижена путем их уничтожения или подавления. При уничтожении наносится такой ущерб, при котором полностью исключается возможность их применения. В результате подавления показатели эффективности функционирования РЭС ухудшаются частично (временно).
Наиболее эффективным средством поражения РЭС (как источников ЭМИ) являются ракеты с головками самонаведения (ГСН) на источник излучения. Применяемые в равносигнальном направлении (РСН) моноимпульсные системы автоматического сопровождения по направлению (АСН) и системы АСН с коническим сканированием обеспечивают высокую точность наведения ракет на источник ЭМИ.
Для обнаружения РЭС и выработки команд целеуказания противорадиолокационным ракетам используются специальные системы РТР, устанавливаемые на борту самолета-носителя ракет. Пеленгация РЭС производится фазовым или амплитудным методом.
Несколько слов о моноимпульсных РЛС. Оценивая помехозащищенность моноимпульсных РЛС по отношению к современным видам помех, необходимо учитывать, что моноимпульсный метод применяется лишь для измерения угловых координат. Что касается методов обнаружения, определения дальности и скорости, а также методов сопровождения по дальности и скорости, то они принципиально не отличаются от методов, реализуемых в обычных одноканальных РЛС сопровождения. Поэтому в этой части существует преемственность видов помех и способов защиты от них между одноканальными и двухканальными координаторами.
Повышенная помехозащищенность угломерного канала моноимпульсных систем связана с принципом его работы. Как известно, в моноимпульсных системах для точного определения направления на цель в принципе достаточно одного импульса. Поскольку за время существования импульса эффективная отражающая поверхность цели практически не меняется, то моноимпульсная система мало чувствительна к амплитудным флуктуациям отраженного сигнала и точность ее по сравнению с одноканальными угломерами выше. При этом за счет эффективного нормирования с помощью сигналов опорной ДН приемной антенны устраняется любая внешняя амплитудная модуляция. Отсюда следует, что угломерный канал мало чувствителен и к помехам с амплитудной модуляцией. Напротив, амплитудно-модулированная помеха, обладая определенным превышением по мощности над отраженным сигналом, облегчает работу моноимпульсного угломерного канала, так как увеличивает эквивалентную отражающую поверхность цели и диапазон дальностей, в котором возможно нормальное слежение за целью. Это справедливо не только для амплитудно-модулированных помех, но также и для помех с другими видами модуляции, излучаемыми из одной точки пространства, например частотно-модулированных и фазомодулированных помех, если только приемные каналы идентичны по амплитудно-фазовым характеристикам.
Однако на практике трудно создать совершенные моноимпульсные приемники, и поэтому могут иметь место те или иные недостатки конструктивного и схемного характера. Эти недостатки могут снижать помехоустойчивость радиолокационных устройств по отношению к активным помехам, в том числе к помехам, излучаемым из одной точки.
В соответствии с этим все; возможные помехи угломерным каналам моноимпульсных РЛС можно разбить на две группы. К первой группе относятся помехи, создание которых обусловливается возможными конструктивно-схемными недостатками реализации моноимпульсного метода. Ко второй группе относятся помехи, создание которых возможно и при идеальной реализации моноимпульсного метода. К таким помехам относятся: помехи на кроссполяризации, двухчастотная, когерентная, мерцающая, перенацеливающая.
В основу РЭП положены изменения внешних условий их функционирования. Эти изменения достигаются преднамеренным воздействием электромагнитными излучениями на приемные устройства РЭС, применением ложных целей и ловушек, уменьшением радиолокационной и оптической контрастности (заметности) лоцируемых объектов и военной техники, изменением свойств (параметров) среды распространения электромагнитных волн, передачей дезинформирующих сигналов.
Ухудшение показателей эффективности функционирования при радиоэлектронном подавлении РЭС и ОЭС может проявляться в следующем:
- уменьшении дальности действия РЭС;
- снижении вероятности обнаружения сигналов (целей) на одной из фиксированных несущих частот в многоканальных РЭС;
- увеличении ошибки автоматического сопровождения цели по одному или нескольким параметрам (направлению, дальности или скорости);
- ухудшении разрешающей способности по дальности и т. д.
В крайнем случае, когда РЭП приводит к полному нарушению работы РЭС противника, оно называется
1.2 Помехи и их влияние на функционирование радиоэлектронных средств
Все радио- и оптико-электронные средства, средства радиоэлектронной разведки и радиоэлектронной борьбы, работают [4] реально в условиях мешающих воздействий. Применительно к РЭС мешающими воздействиями могут быть механические (вибрации, удары, перегрузки), климатические (изменения температуры, влажности, давления окружающей среды), воздействия внешних магнитных, электрических и электромагнитных полей. При наличии мешающих воздействий потенциальные возможности применения РЭС и ОЭС по предназначению снижаются.
Под помехами (в технике) понимается обширная область явлений (мешающих воздействий), препятствующих нормальному функционированию технических устройств, средств и систем.
Степень отклонения показателей качества функционирования от потенциально возможных зависит от многих факторов, прежде всего от вида помех и их интенсивности, от устойчивости РЭС к воздействию помех.
Все без исключения РЭС, упрощенные схемы которых приведены на рис. 1-3, включают в свой состав:
- источник электромагнитного излучения (передающее устройство, отражающий объект, источник теплового излучения);
- среду распространения электромагнитного излучения (ЭМИ);
- приемное устройство ЭМИ (рис. 4).
Рис. 1. Упрощенная схема систем радиосвязи
Рис.2 Упрощенная схема систем активной радиолокации
В каждом из составных звеньев (источнике, среде распространения и приемном устройстве ЭМИ) указанных систем могут действовать помехи.
Рис. 3. Упрощенная схема систем теплолокации радио и ИК-диапазонов
Рис. 4. Упрощенная обобщенная схема систем передачи, получения и извлечения информации
Искажения структуры сигнала, формируемой в передатчике, обусловливаются влиянием внутренних причин:
- флюктуациями напряжений источников питания;
- флюктуациями параметров элементов;
- флюктуациями коэффициентов усиления усилителей.
Подобные же причины искажений структуры принятого сигнала характерны и для приемного устройства.
Для внешних мешающих воздействий открытыми и уязвимыми звеньями систем передачи и получения информации являются приемные устройства ЭМИ и среда распространения.
Воздействие среды распространения на передаваемый (принимаемый) сигнал и возникающие при этом его искажения обусловлены неоднородностью физических параметров реальной среды (плотности, температуры, влажности, электронной концентрации ионосферы) и отличием этих параметров от параметров свободного пространства.
Чем больше отличие параметров реальной среды от параметров свободного пространства, тем больше диапазон флюктуаций параметров среды, тем больше искажения полезного сигнала, тем ниже эффективность функционирования РЭС.
Случайные изменения во времени пространственного положения неоднородностей атмосферы приводят к случайным изменениям параметров сигнала, предсказать которые, как и принять меры к их устранению, практически невозможно.
Параметры среды распространения ЭМИ могут быть изменены и искусственным образом путем применения определенных средств и способов. Это означает, что представляется возможность управлять как характером, так и степенью искажений сигналов, распространяющихся в среде.
Значительное влияние на эффективность функционирования РЭС могут оказывать помехи, возникающие за счет отражения (рассеяния) собственных электромагнитных излучений РЭС от земной поверхности. Электромагнитные волны, излучаемые антенной РЭС по основному и боковым лепесткам ее диаграммы направленности, рассеиваются земной поверхностью и объектами, находящимися на ней, в различных направлениях, в том числе и в направлении источника излучения – в направлении РЭС. Отраженные сигналы, поступая на вход приемника РЭС, оказывают мешающее воздействие. Интенсивность отражений зависит от длины волны и поляризации сигнала РЭС, угла облучения и отражающих свойств поверхности.
Отражение электромагнитных волн от реальных поверхностей представляет собой совокупность зеркальной (когерентной) и диффузной (некогерентной) составляющих. При облучении земной поверхности непрерывным гармоническим сигналом
отраженный от нее сигнал uсs(t) может быть записан в виде аддитивной смеси когерентной uскs(t) = Umкcos(ct-0) составляющей и некогерентной uс.нкs(t) = Umнкcos(ct-1(t)) составляющей (узкополосного гауссова шума):
где Umк,0 – амплитуда и фаза когерентной составляющей отраженного сигнала; Umнк,1(t) – амплитуда и фаза некогерентной составляющей, изменяющиеся во времени по случайному закону; Um(t),(t) – амплитуда и фаза отраженного (результирующего) сигнала, изменяющиеся по случайному закону.
Наличие некогерентной составляющей свидетельствует о том, что спектр отраженного сигнала отличается от спектра сигнала, излучаемого РЭС.
Приемное устройство (антенна и приемник) – как открытое и уязвимое звено РЭС – подвержено воздействию всех внешних ЭМИ, спектр которых находится в пределах его полосы пропускания.
При приеме полезного uc(t) и помехового uп(t) сигналов на входе приемника РЭС может действовать аддитивная смесь
uвх(t)=uc(t) +uп(t) ,
где uвх(t) отличаются от параметров полезного сигнала. Степень отличия зависит от структур полезного и помехового сигналов, от их энергетического соотно шения. Очевидно, что чем больше это отличие, тем больше потери принимаемой полезной информации, тем ниже эффективность функционирования РЭС в условиях воздействия помех.
Внешними мешающими ЭМИ – радиоэлектронными помехами – могут быть излучения: 1) естественного (природного), 2) искусственного происхождения.
К первым относятся:
- тепловое (электромагнитное) излучение Солнца, планет, земной поверхности и предметов, находящихся на ней;
- атмосферные ЭМИ (обусловленные, например, грозовыми разрядами);
- ЭМИ фона околоземного пространства (вызываемые потоком заряженных частиц в верхних слоях атмосферы).
Искусственные радиоэлектронные помехи (радиопомехи) создаются техническими средствами (в том числе РЭС), излучающими электромагнитную энергию, а также объектами, отражающими (рассеивающими) эту энергию. Радиопомехи могут быть неорганизованными (непреднамеренными, неумышленными) и специально организованными (преднамеренными, умышленными).
Неорганизованные радиопомехи РЭС возникают за счет воздействия на приемные устройства РЭС электромагнитных излучений РЭС и других технических средств и устройств. Радиопомехи, создаваемые перечисленными техническими средствами и устройствами, называются индустриальными. Неорганизованные радиопомехи, обусловленные одновременной работой нескольких РЭС, называют взаимными. Они возникают в тех случаях, когда спектры частот ЭМИ одних РЭС находятся в пределах полос пропускания приемников других.
1.3. Энергетические соотношения в условиях свободного
пространства. ЭПР. Уравнение радиолокации
Свободное пространство (воздух, космическое пространство) представляет собой однородную непоглощающую среду, для которой относительная диэлектрическая и магнитная проницаемости равны единице, а удельная проводимость равна нулю ( = 1; = 1; = 0).
Все антенны в волновой зоне (дальней зоне) излучают сферические волны (рис. 5). Распространение такой волны сопровождается сферической расходимостью ее фронта и соответственно сферической расходимостью потока электромагнитной энергии по мере удаления от источника. В практике работы радиолиний в свободном пространстве ослабление напряженности поля из-за уменьшения плотности потока энергии во многих случаях определяет требования к энергетическим показателям аппаратуры.
Рис. 5. К выводу уравнения радиолокации
Поместим в свободном пространстве антенну, излучающую равномерно по всем направлениям (изотропный излучатель). Вокруг источника электромагнитных волн проведем воображаемую сферу радиуса R. Если к излучателю подведена мощность Р1 и она равномерно распределяется по поверхности сферы с площадью 4R2, то средняя за период плотность потока мощности (мощность приходящаяся на единицу поверхности) равна
Известно, что значение Пср, связано с действующими значениями напряженности электрического Ед и магнитного Нд полей соотношением .
Значения Ед и Нд связаны через характеристическое сопротивление свободного пространства W0= 120. Отсюда Нд = Ед / 120 и Пср = Ед2 /120. Из сравнения двух выражений для Пср получим формулу для расчета Ед :
– действующего значения напряженности электрического поля в свободном пространстве для ненаправленного излучателя.
Амплитудное значение напряженности поля будет в раз больше, то есть
.
На практике обычно рассчитывается и измеряется действующее значение напряженности электрического поля Ед. Реально изотропные антенны не существуют (существуют квазиизотропные) и антенны обладают направленностью. Направленные свойства антенн характеризуются формой диаграммы направленности, коэффициентом усиления G или коэффициентом направленного действия D.
Диаграмма направленности показывает зависимость напряженности поля от пространственных координат.
Коэффициент направленного действия (КНД) показывает во сколько раз надо уменьшить излучаемую мощность, если ненаправленную (изотропную) антенну заменить направленной для получения одинаковых значений напряженности поля в точке приема.
Коэффициент усиления (КУ) показывает во сколько раз надо уменьшить подводимую мощность, если ненаправленную (изотропную) антенну заменить направленной для получения одинаковых значений напряженности поля в точке приема. При этом КПД изотропной антенны принимается равным единице.
.
Произведение Р1G1 = Р1экв называют эквивалентной мощностью излучения, которую надо подвести к ненаправленной антенне, чтобы получить в точке приема такую же напряженность поля, как от направленной антенны с коэффициентом усиления G1, к которой подведена мощность Р1.
Из формулы следует, что даже в свободном пространстве, среде без потерь, напряженность поля в точке приема убывает обратно пропорционально первой степени расстояния, что обусловлено уменьшением плотности мощности (среднего за период колебаний значения вектора Пойнтинга) при удалении от источника.
При расчете и проектировании радиолиний, особенно в диапазонах сантиметровых и дециметровых волн, необходимо знать мощность сигнала на входе приемника. Эта мощность определяется различно для радиолиний двух типов. На радиолинии 1-го типа (рис. 6) передача информации ведется непосредственно из пункта передачи в пункт приема.
Рис. 6. Радиолиния 1-го типа
На радиолиниях 2-го типа (рис. 7) принимаются сигналы, испытавшие пассивную ретрансляцию на пути от передатчика к приемнику. На этих линиях непосредственная передача энергии волны от источника до точки приема по каким-либо причинам не возможна (например, этот путь перекрыт препятствием).
Рис. 7. Радиолиния 2-го типа
На наземных радиолиниях с пассивной ретрансляцией на пути распространения имеется специальное пассивное антенное устройство (или другой объект), который облучается первичным полем и переизлучает его в виде вторичного поля, предназначенного для приема. По такому же принципу работают системы пассивной радиолокации, где первичное поле облучает обнаруживаемую цель, а поле, переизлученное целью, принимается локатором.
На любой радиолинии мощность на входе приемного устройства Р2 связана с плотностью потока мощности в месте приема П2 соотношением
Р2 = П2Sд2,
где 2 – КПД фидера приемной антенны; Sд = D22 /4 – действующая площадь приемной антенны.
На радиолинии 1-го типа в условиях свободного пространства плотность потока мощности в месте приема равна
,
где Р1 – мощность на выходе передающего устройства, 1-КПД передающего фидера, D1 – коэффициент направленного действия передающей антенны. Для радиолинии 1-го типа мощность на входе приемника в условиях свободного пространства равна
, то есть
– уравнение радиолокации 1-го типа.
На радиолинии 2-го типа значение П2 зависит от тех же параметров, что и на линии 1-го типа, и, кроме того, от переизлучающих свойств ретранслятора. Если какое-либо тело облучается полем, то его способность переизлучать это поле оценивается эффективной площадью рассеяния эф (ЭПР). Величина ЭПР зависит от формы, размеров, электрических свойств материала из которого выполнен переизлучатель, а так же от его ориентации относительно направления распространения первичного поля и направления на прием.
ЭПР равна площади поперечного сечения идеального изотропного отражателя, создающего в точке приёма такое же поле, как и цель.
Если около переизлучающего тела плотность потока мощности первичного поля
П1 = Р11D1 F12(,)/ (4R2),
то переизлученная мощность
Р2= П1эф,
а плотность потока мощности вторичного поля вблизи приемной антенны в условиях свободного пространства П2 = Р2 / (4R22) или
.
Тогда мощность на входе приемного устройства для радиолинии 2-го типа
или .
В тех случаях, когда передача и прием осуществляются в одной точке R1 = R2 = R и на одну антенну, получается уравнение радиолокации
.
Если Р2 задано, то можно вычислить Rmax:
.
Из формул видно, что в свободном пространстве при отсутствии пассивного ретранслятора на линии мощность на входе приёмника уменьшается обратно пропорционально квадрату расстояния, а при работе с ретранслятором – обратно пропорционально четвертой степени. Такое быстрое убывание поля на линиях 2-го типа объясняется тем, что поле дважды испытывает расходимость сферического фронта волны: первичное поле – на пути от источника (передающей антенны) до пассивного ретранслятора и вторичное поле – на пути от ретранслятора до пункта приема.
1.4. Классификация и краткая характеристика организованных радиопомех
Организованные радиопомехи [4] создаются преднамеренными действиями противоборствующих сторон в целях снижения эффективности функционирования РЭС противника. Для их создания применяются специальные средства и устройства (станции и передатчики радиопомех, дипольные, уголковые и линзовые отражатели, радиолокационные и ИК-ловушки и др.).
Создание помех возможно также преднамеренным воздействием на среду распространения электромагнитной энергии, излучаемой или принимаемой РЭС или ОЭС. В результате воздействия на среду могут возникать искусственные локальные или протяженные образования (например, искусственные ионизированные области в атмосфере), параметры которых отличаются от параметров окружающей среды распространения ЭМИ от источника к прием ному устройству.
Создание радиопомех является одним из основных способов подавления РЭС и ОЭС, так как независимо от назначения и типа их приемные устройства подвержены (при соблюдении определенных условий) воздействию электромагнитных излучений – помеховых сигналов.
Здесь и далее под помеховым сигналом будем понимать напряженность eu(t) электрического поля внешнего (мешающего) электромагнитного излучения, действующего на входе антенны, или напряжение un(t) на выходе приемника подавляемого РЭС, выраженные как функции времени.
Организованные радиопомехи можно классифицировать:
- по способу формирования;
- конечному результату (эффекту) воздействия на РЭС (ОЭС);
- соотношению ширины спектра помехового сигнала и полосы пропускания подавляемого канала РЭС (ОЭС);
- классам и назначению подавляемых РЭС (ОЭС);
- способам создания и т. д.
В зависимости от способа формирования (образования) организованные радиопомехи могут быть активными, пассивными и комбинированными (активно-пассивными).
Активные организованные радиопомехи создаются специальными передатчиками или станциями радиопомех, излучающими помеховые сигналы той или иной структуры.
По структуре (закону изменения параметров во времени) помеховые сигналы могут быть детерминированными (неслучайными) или случайными, непрерывными или импульсными, немодулированными или модулированными.
Детерминированные помеховые сигналы – сигналы, описываемые определенной функцией времени. Это, например, непрерывные немодулированные высокочастотные синусоидальные колебания, непрерывные синусоидальные колебания, модулированные по амплитуде синусоидальным колебанием.
Случайными называют помеховые сигналы, параметры которых (или хотя бы один из параметров) изменяются во времени случайным образом, т. е. являются случайными функциями времени. Примером служат шумовые помеховые сигналы.
Непрерывные помеховые сигналы – это высокочастотные де терминированные или случайные колебания, непрерывно изменяющиеся во времени.
Импульсные помеховые сигналы представляют собой прерывистые во времени последовательности высокочастотных колебаний.
Параметры непрерывных (амплитуда, частота, фаза) и импульсных (амплитуда, длительность импульсов, временное положение относительно импульсов полезных сигналов) могут изменяться преднамеренно во времени по детерминированному или случайному закону в соответствии с законом изменения параметров модулирующего колебания. В этом случае помеховые сигналы называют модулированными.
Непрерывные модулированные помеховые сигналы в зависимости от модулируемого параметра подразделяют на амплитудно-, частотно- и фазомодулированные сигналы. Импульсные помеховые сигналы, параметры которых изменяются во времени по случайному закону, называют хаотическими импульсными помеховыми сигналами.
Выбор структуры помехового сигнала (при его формировании в передатчиках или станциях помех, при организации РЭП) зависит от структуры построения приемного устройства и структуры полезного сигнала подавляемого РЭС, от требуемого (заданного) эффекта воздействия помехового сигнала (подавление полезного сигнала, маскировка полезного сигнала или его имитация и др.).
Активные радиопомехи используются для подавления всех без исключения РЭС и ОЭС.
Пассивные организованные радиопомехи возникают вследствие отражения (рассеяния) электромагнитной энергии, излучаемой РЭС или ОЭС, от искусственно (преднамеренно) создаваемых образований (облаков или протяженных полос дипольных отражателей, уголковых или линзовых отражателей, аэрозолей и др.). Помеховый сигнал, возникающий за счет отражения, чаще всего является случайным.
Структура (параметры) помехового сигнала, воздействующего на подавляемые РЭС, будет определяться структурой полезного сигнала РЭС, взаимным пространственным положением подавляемого РЭС и искусственного образования, количеством элементарных отражателей, попавших в поле зрения диаграммы направленности антенны подавляемого РЭС.
Пассивные радиопомехи применяются для подавления радио- и оптико-локационных средств. При создании пассивных радиопомех могут решаться задачи маскировки или имитации сигналов, отраженных от целей.
Комбинированные (активно-пассивные) организованные радиопомехи образуются за счет отражения (рассеяния) электромагнитной энергии, излучаемой станцией радиопомех в направлении искусственного или естественного образования.
Структура помехового сигнала, воздействующего на подавляемое РЭС, определяется в этом случае структурой помехового сигнала станции помех, параметрами отражающего образования, взаимным пространственным положением источника облучения (станции помех), облучаемого образования и подавляемого РЭС, скоростью изменения взаимного пространственного положения и другими факторами.
В зависимости от конечного результата воздействия на РЭС (ОЭС) активные и пассивные радиопомехи разделяются на маскирующие и имитирующие.
При воздействии маскирующих радиопомех (маскирующих помеховых сигналов) на входе приемного устройства подавляемого РЭС создается мешающий фон (в дополнение к фону, образованному внутренними шумами приемника), который исключает или затрудняет получение полезной информации.
Маскирование может осуществляться:
- по параметрам полезного сигнала (амплитуде, несущей частоте, фазе, спектру);
- по параметрам местоположения лоцируемого объекта (угловым координатам, дальности);
- по радиальной скорости движения (доплеровскому приращению частоты сигнала) и т.д.
В результате маскирования ухудшаются характеристики обнаружения РЛС (снижается вероятность правильного обнаружения или повышается вероятность ложной тревоги), ухудшается разрешающая способность и точность определения параметров положения лоцируемых объектов, затрудняется выделение передаваемых сообщений (команд) в линиях радиосвязи и телеуправления, увеличиваются ошибки определения параметров сигналов разведываемых РЭС, вносятся ошибки или происходит срыв автоматического сопровождения цели (по направлению, дальности, скорости).
Эффективность маскирующих радиопомех зависит от частотной и временной структуры помехового и полезного сигналов и их энергетического соотношения на входе приемника подавляемого РЭС.
В качестве активных маскирующих радиопомех используются преимущественно непрерывные шумовые сигналы. Пассивные маскирующие радиопомехи создаются искусственными образованиями большой протяженности.
Имитирующие радиопомехи вносят ложную информацию при приеме и обработке сигналов, принимаемых РЭС. Значения параметров имитирующего помехового сигнала (поляризация, несущая частота амплитуды, и, Тп, вид модуляции и др.) обычно близки к значениям параметров полезных сигналов, используемых в РЭС для получения полезной информации.
В качестве примеров имитирующих радиопомех можно привести многократные ответные (ретранслируемые) импульсные радиопомехи РЛС обнаружения воздушных целей, прицельные по частоте сканирования радиопомехи системам АСН с коническим сканированием, уводящие по дальности или скорости радиопомехи системам АСД и АСС РЛС управления оружием.
При создании имитирующих радиопомех РЛС обнаружения на экранах их индикаторов возникают ложные радиолокационные отметки, подобные отметкам от реальных целей. Анализ и оценка воздушной обстановки в таких условиях усложняются.
Воздействие имитирующих радиопомех на РЛС управления оружием может приводить к увеличению ошибок сопровождения цели (по направлению, дальности, скорости), к переводу РЛС с сопровождения истинной цели на сопровождение ложной.
В зависимости от соотношения ширины спектра радиопомехи и полосы пропускания подавляемого канала РЭС радиопомехи подразделяются на прицельные и заградительные. Прицельными и заградительными радиопомехи могут быть по несущей частоте, по частоте модуляции несущего колебания (например, по частоте сканирования), по доплеровской частоте.
Прицельные радиопомехи по частоте характерны тем, что ширина их спектра соизмерима с шириной полосы пропускания подавляемого канала РЭС (при условии, что средняя частота помехового сигнала примерно равна резонансной частоте подавляемого канала). Так, прицельные радиопомехи по несущей частоте имеют ширину спектра, соизмеримую с шириной спектра полезного сигнала (шириной полосы пропускания приемника) подавляемого РЭС, а прицельные по доплеровскому приращению частоты отраженного сигнала – с шириной полосы пропускания узкополосного фильтра системы АСС.
Заградительные радиопомехи имеют ширину спектра, существенно (в 10 и более раз) превышающую полосу пропускания подавляемого канала РЭС. При применении заградительных радиопомех имеется возможность одновременного подавления однотипных РЭС, работающих на близких несущих частотах (радиопомехи, заградительные по несущей частоте), или подавления соответствующих каналов РЭС при отсутствии точных данных об их параметрах (радиопомехи, заградительные по частоте сканирования, по доплеровскому приращению частоты).
Прицельными и заградительными радиопомехи могут быть и по другим параметрам: по направлению, дальности, поляризации, коду, длительности и периоду следования импульсов.
Радиопомехи можно классифицировать также по классам и назначению подавляемых РЭС или подавляемых каналов РЭС:
- помехи радио- и оптико-электронным средствам связи;
- навигации;
- локации;
- управления объектами; радиопомехи РЛС, работающим в режиме обзора или автоматического сопровождения цели;
- радиопомехи системам АСН, АСД, АСС и т. д.
Способ создания радиопомех (способ применения средств создания радиопомех) предусматривает применение таких видов помеховых сигналов (шумовых, непрерывных, детерминированных, случайных, модулированных по амплитуде, частоте и т. д.), а также действий (или последовательности действий), в результате которых обеспечивается требуемое снижение эффективности функционирования РЭС.
1.5. Математическое описание помеховых сигналов
Математическое описание помеховых сигналов позволяет определять требования на их структуру в целях подавления РЭС заданного класса и назначения или анализировать воздействие сигналов заданной структуры на РЭС различных классов.
Рассмотрим отдельно методы описания детерминированных и случайных помеховых сигналов [4].
Для описания детерминированных помеховых сигналов используются их временные и спектральные представления.
Периодические детерминированные сигналы имеют линейчатые (дискретные) спектры, а непериодические – сплошные.
Для детерминированных сигналов u(t) справедливо соотношение (теорема Парсеваля) для энергии Е сигнала:
,
где S() –спектральная функция сигнала.
Это выражение устанавливает связь между энергией Е сигнала, выделяемой на единичном сопротивлении (1 Ом), и спектральной функцией. Величина характеризует часть энергии dE сигнала, содержащуюся в полосе частот d. Эту величину называют спектральной плотностью энергии сигнала:
.
Спектральная плотность энергии сигнала характеризует распределение энергии по частоте .
Для описания детерминированных сигналов используют также их автокорреляционные функции (АКФ). Они характеризуют степень связи (корреляции) сигнала со своей копией, сдвинутой на интервал времени .
При конечной длительности сигнала его АКФ
.
Взаимную корреляцию двух сигналов u1(t) и u2(t) характеризует взаимно корреляционная функция (ВКФ), определяемая выражением:
.
Автокорреляционная функция синусоидального сигнала
определится выражением
Автокорреляционная функция сигнала является четной функцией R()=R(-) и имеет максимум при =0 (для непериодических функций), ноль – при , то есть .
Простейшим (по структуре) детерминированным непрерывным помеховым сигналом является немодулированное синусоидальное высокочастотное колебание, излучаемое на несущей частоте подавляемого РЭС или на частоте, значение которой находится в пределах полосы пропускания приемника подавляемого РЭС.
Аналитическое выражение для этого вида помехового сигнала имеет вид
,
где Umп, п и п – соответственно амплитуда, частота и начальная фаза помехового сигнала.
Детерминированные непрерывные модулированные помеховые сигналы формируются при модуляции высокочастотных колебаний по амплитуде, частоте или фазе (или одновременно по нескольким параметрам) детерминированными низкочастотными колебаниями. При амплитудной модуляции высокочастотного колебания низкочастотным колебанием выражение для помехового сигнала имеет вид
,
где Umп, п, п – соответственно амплитуда, частота и начальная фаза высокочастотного колебания; п, п – соответственно частота и начальная фаза низкочастотного (модулирующего) колебания; mп – коэффициент модуляции.
Модуляция непрерывных высокочастотных колебаний может осуществляться и несколькими низкочастотными синусоидальными колебаниями или низкочастотным колебанием переменной частоты, например
п(t)= п0+ пcos mt.
Примером детерминированных импульсных помеховых сигналов являются ответные (ретранслируемые) сигналы, имитирующие сигналы импульсных РЛС. Помеховые сигналы формируются в станциях радиопомех путем приема сигналов подавляемой РЛС, их усиления и преобразования. Они могут быть однократными или многократными, с постоянной или изменяющейся во времени задержкой относительно принимаемого сигнала. Их параметры (форма огибающей, частота высокочастотного заполнения, длительность и период следования) чаще всего близки к параметрам полезных сигналов подавляемого РЭС.
Широкое распространение в практике РЭП получили помеховые сигналы, у которых хотя бы один параметр – амплитуда, частота, фаза, длительность импульсов и т. д.– является случайной функцией времени. К таким сигналам относятся непрерывные шумовые и хаотические импульсные помеховые сигналы.
Непрерывные шумовые помеховые сигналы являются наиболее универсальными, так как их воздействие эффективно при подавлении РЭС различного назначения. В зависимости от способа формирования шумовые сигналы подразделяют на немодулированные – прямошумовые (сигналы, амплитуда, частота и начальная фаза которых изменяются во времени случайным образом) и модулированные шумовые, образуемые модуляцией незатухающих высокочастотных колебаний шумом по амплитуде, частоте, фазе или одновременно по нескольким параметрам.
Хаотические импульсные помеховые сигналы представляют собой последовательность высокочастотных импульсов, параметры которых (амплитуда, частота, фаза, длительность и период следования) изменяются во времени случайным образом.
Для характеристики случайных помеховых сигналов uп(t) используются методы теории вероятностей. Параметры этих сигналов могут быть заданы усредненными (статистическими) характеристиками, например математическим ожиданием и среднеквадратическим отклонением. Вычисление этих характеристик требует распределения вероятностей мгновенных значений рассматриваемого параметра w(uп).
Для стационарных помеховых сигналов с гауссовым законом распределения мгновенных значений uп (t) одномерная плотность распределения вероятностей определяется выражением
,
где – постоянная составляющая (среднее значение) напряжения помехового сигнала; п2 – дисперсия (мощность) помехового сигнала на сопротивлении в 1 Ом; т.к. стационарный случайный процесс не зависит от начала отсчета времени, то
w(x1, x2, t1, t2)= w(x1, x2, t1+ t0,, t2+ t0).
Для стационарных эргодических сигналов любые характеристики получают усреднением реализаций по времени. Соответственно выражения для среднего значения и дисперсии помехового сигнала имеют вид:
,
.
Автокорреляционная функция стационарного эргодического процесса определяется усреднением одной реализации помехового сигнала по времени
.
На практике пользуются нормированными АКФ
.
Для количественной характеристики АКФ используют так называемое время (интервал) корреляции помехового сигнала
,
где () – огибающая АКФ.
Величина к характеризует (в среднем) интервал времени, на котором мгновенные значения помехового сигнала взаимосвязаны (коррелированы). Для стационарных процессов (помеховых сигналов)
к =1/fп ,
где fп – ширина спектра помехового сигнала.
Важнейшей характеристикой шумовых помеховых сигналов является спектральная плотность, определяющая распределение их мощности по частотам:
,
где Рп – мощность помехового сигнала на интервале частот f. Полная мощность помехового сигнала
.
Если спектральная плотность случайного процесса Gп(f) = N0 = const в бесконечной полосе частот, то такой процесс называют «белым» шумом. АКФ такого процесса определяется выражением
R()=N0()/2,
где () – дельта-функция. Реальные помеховые сигналы имеют равномерный спектр в ограниченной полосе частот fп=fmax –fmin.
В этом случае мощность помехового сигнала
Pп=Gnfп.
Помеховый сигнал рассматривается как «белый» шум, если его спектр практически равномерен в пределах полосы пропускания приемника подавляемого РЭС. Для мощности таких помеховых сигналов на выходе линейной части приемника (на выходе УПЧ) справедливо примерное равенство
Pп вых=kпр2Gп(f)fпр,
где Gn(f) – спектральная плотность помехового сигнала на входе приемника; k2пр – коэффициент усиления приемника по мощности на резонансной частоте его настройки.
Для характеристики хаотических импульсных помеховых сигналов используются законы распределения их параметров – амплитуд Umп, длительность импульсов и, временных интервалов между ними Тп и средних значений этих параметров.
Маскирующие свойства помеховых сигналов характеризуют понятием «качество шума». Количественным показателем маскирующих свойств является так называемый коэффициент качества шума, определяемый выражением
ш= Р'ш /Рш ,
где Р'ш и Рш – значения мощностей сравниваемого помехового сигнала и «белого» нормального шума на входе линейной части приемника, при котором обеспечивается одинаковый эффект подавления РЭС (например, обеспечивается снижение вероятности обнаружения сигнала до заданного значения при фиксированном значении вероятности ложной тревоги).
1.6. Особенности воздействия на радиоэлектронные средства помеховых сигналов различного вида
Для подавления РЭС определенного класса и назначения (РЭС связи, локации, навигации, управления) применяются помеховые сигналы различного вида. Их воздействие на РЭС может приводить:
- к перегрузке его приемника;
- к маскированию;
- к искажению или имитации полезных сигналов.
На конечный результат (эффективность) воздействия оказывают влияние:
- соотношение мощностей помехового и полезного сигналов или абсолютное значение мощности помехового сигнала на входе приемника подавляемого РЭС;
- соотношение ширины спектра помехового сигнала и полосы пропускания подавляемого устройства (приемника, системы АСН, АСС);
- структура полезного сигнала, структура построения подавляемого устройства и способы повышения помехоустойчивости, применяемые в РЭС;
- степень взаимной когерентности или коррелированности помехового и полезного сигналов или взаимной когерентности помеховых сигналов, действующих на входе приемника подавляемого РЭС, и др.
Поэтому выбор вида и параметров помехового сигнала (его амплитудной, частотной, фазовой и поляризационной структуры) должен осуществляться с учетом структуры полезного сигнала и особенностей функционирования подавляемого РЭС, требуемого (заданного) эффекта и особенностей воздействия. Рассмотрим возможности применения некоторых видов помеховых сигналов для подавления РЭС.
Помеховый сигнал в виде немодулированного гармонического колебания в принципе может быть использован для подавления всех без исключения РЭС. Его воздействие на РЭС может приводить к перегрузке приемника или искажению полезного сигнала. Эффективность воздействия зависит от абсолютного значения мощности помехового сигнала на входе приемника, соотношения амплитуд помехового и полезного сигналов, разности их несущих частот и начальных фаз, вида полезного сигнала и способа обработки сигналов в приемнике, от степени взаимной коррелированности помехового и полезного сигналов. Для обеспечения мешающего воздействия необходимо, чтобы разность несущих частот помехового и полезного сигналов не превышала примерно половины ширины полосы пропускания линейной части приемника подавляемого РЭС, т. е.
f= |fп - fc |0.5fпр .
При выполнении этого условия и одновременном воздействии помехового и полезного сигналов с частотами п и с и с произвольным соотношением начальных фаз п и с на входе УПЧ приемника в результате взаимодействия сигналов образуется результирующее напряжение, амплитуда которого
,
где Umп и Umс – амплитуды помехового и полезного сигналов; р = п - с – разность начальных фаз помехового и полезного сигналов; б=|п-с| – частота биений.
При случайном изменении разности частот или фаз (например, из-за нестабильности частоты генератора помеховых сигналов) мешающее воздействие помехового сигнала проявляется в том, что амплитуда результирующего сигнала изменяется во времени случайным образом.
При большой мощности помехового сигнала может наступить перегрузка приемника помеховым сигналом, при которой прием полезного сигнала исключается.
Приближенным аналогом подобного рода взаимодействия сигналов является многопутное распространение электромагнитных волн от источника к приемнику, возникающее в линиях радиосвязи за счет их отражений от протяженных образований естественного происхождения (земной поверхности, ионосферы). При взаимодействии прямого сигнала и зеркальной (когерентной) составляющей сигнала, отраженного от образования, в точке приема возникает явление интерференции и как результат – замирание принимаемого сигнала. Показатели качества ведения радиосвязи в таких случаях снижаются.
Подобная картина взаимодействия сигналов имеет место при локации маловысотных воздушных объектов, при наведении ракет класса «воздух – воздух» на воздушные цели (при их полетах на малых высотах), при создании радиопомех системам АСН путем искусственного подсвета земной поверхности.
Помеховые сигналы в виде немодулированного синусоидального колебания не нашли широкого применения. Это объясняется тем, что, во-первых, при создании радиопомех требуется высокая точность настройки частоты передатчика радиопомех на частоту подавляемого РЭС и, во-вторых, от воздействия этих помеховых сигналов можно легко избавиться путем включения в тракт усиления колебаний радиочастоты режекторных (вырезающих) фильтров.
Воздействие на приемник РЭС детерминированных амплитудно-модулированных помеховых сигналов с несущей частотой п и начальной фазой п (при условии |п- c|0.5пр) может приводить, так же как и рассмотренного выше немодулированного сигнала к перегрузке приемника, искажению или имитации полезного сигнала РЭС. Последнее имеет место, например, при создании помех системам АСН с коническим сканированием.
Детерминированные импульсные помеховые сигналы используют как имитирующие радиопомехи при подавлении РЭС, работающих в импульсном режиме излучения (импульсные РЛС, командные радиолинии управления с импульсной модуляцией). Для эффективного воздействия этого вида помех необходимо, чтобы их параметры (f0, и, Тп) были бы примерно равны по своим значениям параметрам полезных сигналов подавляемых РЭС.
Непрерывные шумовые помеховые сигналы могут применяться для подавления всех без исключения РЭС в качестве маскирующих радиопомех. Поэтому важным параметром этого вида сигналов является коэффициент качества шума ш= Р'ш /Рш. Среди шумовых помеховых сигналов наилучшими маскирующими свойствами (при равных средних мощностях и ширине спектров) обладают прямошумовые помеховые сигналы.
Хаотические импульсные помеховые сигналы по результату воздействия на РЭС относятся к маскирующим радиопомехам. Эффективность данных радиопомех в значительной степени зависит от соотношения средних значений параметров импульсной последовательности (временного интервала между импульсами и их длительности) с параметрами подавляемого РЭС, в частности, с шириной полосы пропускания приемника.
2. Формирование сигналов в передатчиках радиопомех
2.1. Построение передатчиков прямошумовых радиопомех
Краткая характеристика способов формирования помеховых сигналов. К настоящему времени определились два основных способа формирования помеховых сигналов [4] в передатчиках, работающих в радиодиапазоне:
- путем автогенерации колебаний с последующим их усилением (или без него);
- путем модуляции несущего колебания по тому или иному параметру.
В качестве примера реализации первого способа могут служить так называемые передатчики прямошумовых радиопомех (ПШП) различных типов.
Модулированные помехи принято разделять по виду модулируемого параметра несущего колебания:
- на амплитудно-модулированные шумовые помехи (АМШП);
- фазомодулированные шумовые помехи (ФМШП);
- частотно-модулированные шумовые помехи (ЧМШП).
Реально в СВЧ приборах не удается реализовать «чистую» модуляцию по одному из указанных параметров. Поэтому реально имеет место комбинированная модуляция, например AM-ФМ; ФМ-AM и т. д. Название помех принято определять тем видом модуляции, который преобладает в данном передатчике.
СВЧ приборы, применяемые в передатчиках помех:
- лампы бегущей волны (ЛБВ-О);
- лампы обратной волны со скрещенными полями (ЛОВ-М).
Полупроводниковые приборы:
- лавинно-пролетные диоды (ЛПД);
- диоды с барьером Шоттки;
- биполярные и полевые транзисторы и т. д.
Основное внимание далее будет уделено рассмотрению передатчиков помех на вакуумных приборах: ЛБВ-О, ЛОВ-М, магнетронах, как наиболее мощных приборах.
Принципы построения передатчиков прямошумовых радиопомех [4]. Известно, что наилучшими маскирующими свойствами обладают «белые» гауссовы шумы. К «белым» шумам, подчиняющимся гауссову закону распределения мгновенных значений, относятся тепловые шумы резисторов, дробовые шумы электронных ламп и полупроводниковых приборов, фоторезисторов и фотоэлементов. Поэтому естественно стремление использовать указанные источники шумов для получения помеховых сигналов.
Реализуется это в так называемых передатчиках прямошумовых радиоэлектронных помех. Шумы первичных источников усиливаются, проходят цепь преобразований спектра и антенной передатчика излучаются в пространство.
Характерной особенностью помехового сигнала такого вида является то, что все его параметры – амплитуда, фаза (частота) изменяются по случайным законам.
Общее выражение для напряжения прямошумовых помех имеет вид
,
где Um(t), (t) – случайные функции времени. Текущее значение частоты помехового сигнала
является случайной функцией времени с математическим ожиданием, равным 0.
Обычно для этих сигналов удовлетворяется условие fп/f0 <<1 (fп – ширина спектра помехового сигнала), в связи с чем их часто называют квазигармоническими шумами.
На практике нашли применение два типа передатчиков прямошумовых радиопомех:
- с прямым усилением шумов первичного источника;
- с переносом спектра шумов первичного источника методом гетеродинирования.
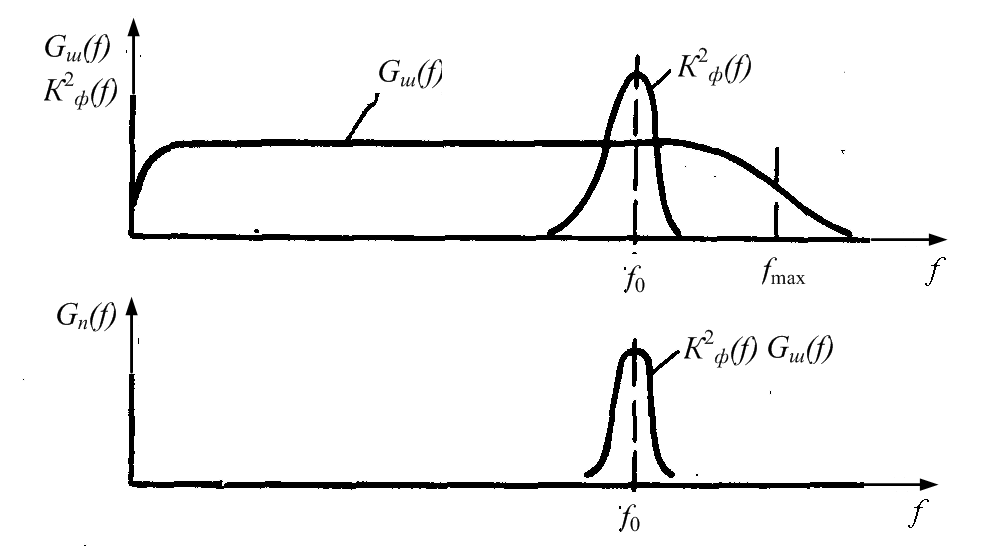
Упрощенная структурная схема передатчика прямошумовых радиопомех с непосредственным (прямым) усилением шумов представлена на рис. 8,а. Графики спектральных плотностей шума первичного источника Gm(f) и формируемого помехового сигнала Gп(f) приведены на рис. 8,б. Там же показан примерный вид амплитудно-частотной характеристики перестраиваемого фильтра К2ф(f).
В передатчиках прямошумовых помех (с прямым усилением) используются специально разработанные вакуумные или полупроводниковые шумовые диоды. В вакуумном диоде для повышения уровня дробовых шумов используют высокотемпературный катод прямого накала. Диод работает в режиме насыщения анодного тока.
В полупроводниковых шумовых диодах используют явления лавинного пробоя. Но, несмотря на принимаемые меры, уровень спектральной плотности шумов таких источников не превышает Gm(f) =10-17 …10-16 Вт/Гц, а ширина спектра не превышает 2108…3108 Гц.
Требуемая ширина спектра помех fп формируется узкополосным перестраиваемым фильтром. Настройка на несущую частоту подавляемой РЛС f0 производится по сигналам разведывательной части станции помех. Часто настройка полосового фильтра бывает фиксированной, и каждый передатчик работает на фиксированной частоте, а заданный диапазон рабочих частот перекрывается помеховыми сигналами от нескольких передатчиков, спектры которых примыкают друг к другу.
Так как мощность передатчика помех
Рп G п(f0) f п
существенно (в сотни и тысячи раз) превосходит мощность первичного источника шума, то при формировании узкополосных помеховых сигналов вынуждены применять многокаскадные резонансные усилители.
а
б
Рис. 8. Передатчик прямошумовых радиопомех с прямой фильтрацией
спектра шума первичного источника:
а – структурная схема; б – графики, поясняющие его работу
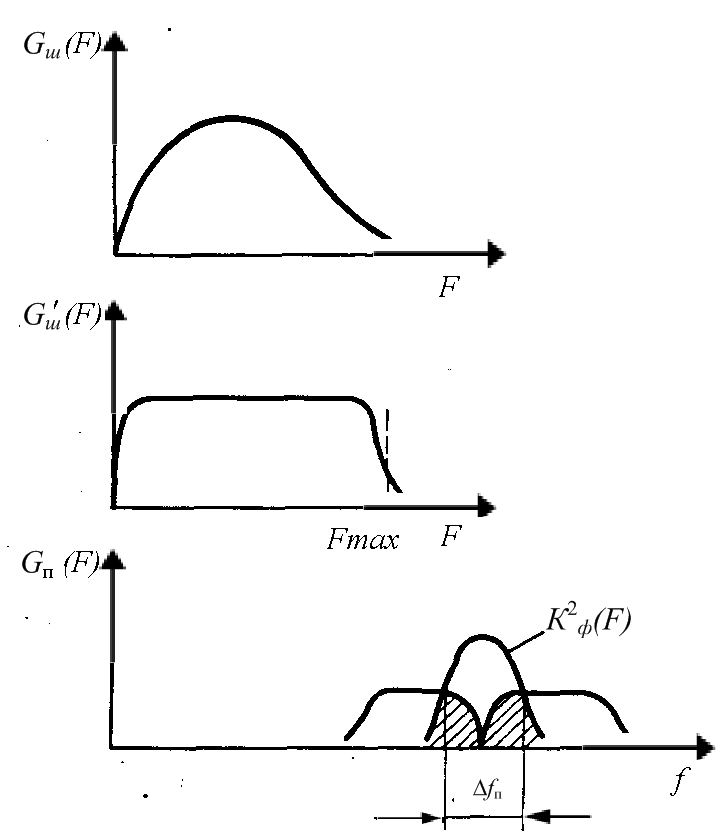
Число каскадов может быть уменьшено при построении передатчика помех по структурной схеме, приведенной на рис. 9, а. Графики спектров, поясняющие работу передатчика, изображены на рис. 9, б. Сравнительно низкочастотные шумы Um(t), имеющие неравномерную спектральную плотность, поступают на корректирующий фильтр.
Амплитудно-частотная характеристика фильтра выбирается из условия выравнивания спектра сигнала первичного источника, т. е.
в интервале 0<F<Fmax. Это позволяет выровнять («отбелить») шум первичного источника (на рис. 9,б). Далее эти шумы поступают на смеситель. На второй вход смесителя поступают синусоидальные колебания с перестраиваемого по частоте генератора.
Смеситель собран по балансной схеме. В нем с сигналами осуществляется операция, близкая к операции умножения, так что
,
а
б
Рис. 9. Передатчик прямошумовых помех с перекосом спектра:
а – структурная схема; б – графики, поясняющие его работу
где – коэффициент передачи смесителя. В результате такого преобразования на выходе смесителя выделяются две полосы спектра
fi =fг ±Fi (Fi – i-я составляющая спектра шума первичного источника). Из спектра сигнала на выходе смесителя резонансным перестраиваемым фильтром выделяется полоса частот. Полученный таким образом сигнал усиливается и излучается в пространство.
Балансный смеситель можно рассматривать и как амплитудный модулятор с подавлением несущего колебания шума.
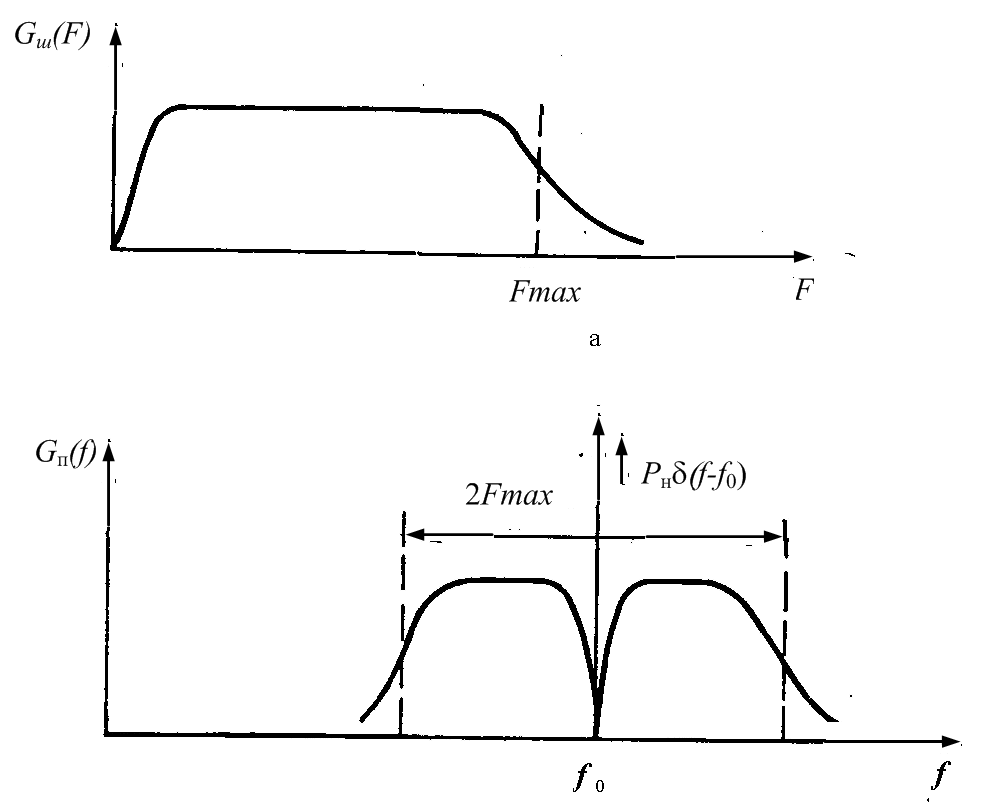
2.2 Принципы построения передатчиков шумовых радиопомех с амплитудной модуляцией
В передатчике этого типа [4] высокочастотное синусоидальное колебание
модулируется видеошумами uш(t) по амплитуде (спектр шума показан на рис.10,а).
Помеховый сигнал в этом случае описывается выражением
,
где .
Здесь – крутизна модуляционной характеристики передатчика.
Обозначим .
Коэффициент называют мгновенным коэффициентом амплитудной модуляции. Окончательно для АМ-шумов получим
.
Представим формулу в виде
.
Из этого выражения следует, что спектр АМШП (Gn(f) на рис. 10,б) содержит регулярную составляющую на частоте f0=0/2.
Спектр модулирующих шумов um(t) образует боковые полосы с частотами f+=f0+Fi и f–=f0–Fi, где Fi - i-я составляющая спектра модулирующих шумов.
Полная мощность передатчика АМ-помех
,
где – мощность регулярной составляющей несущего колебания; – мощность боковых составляющих спектра помехового сигнала.
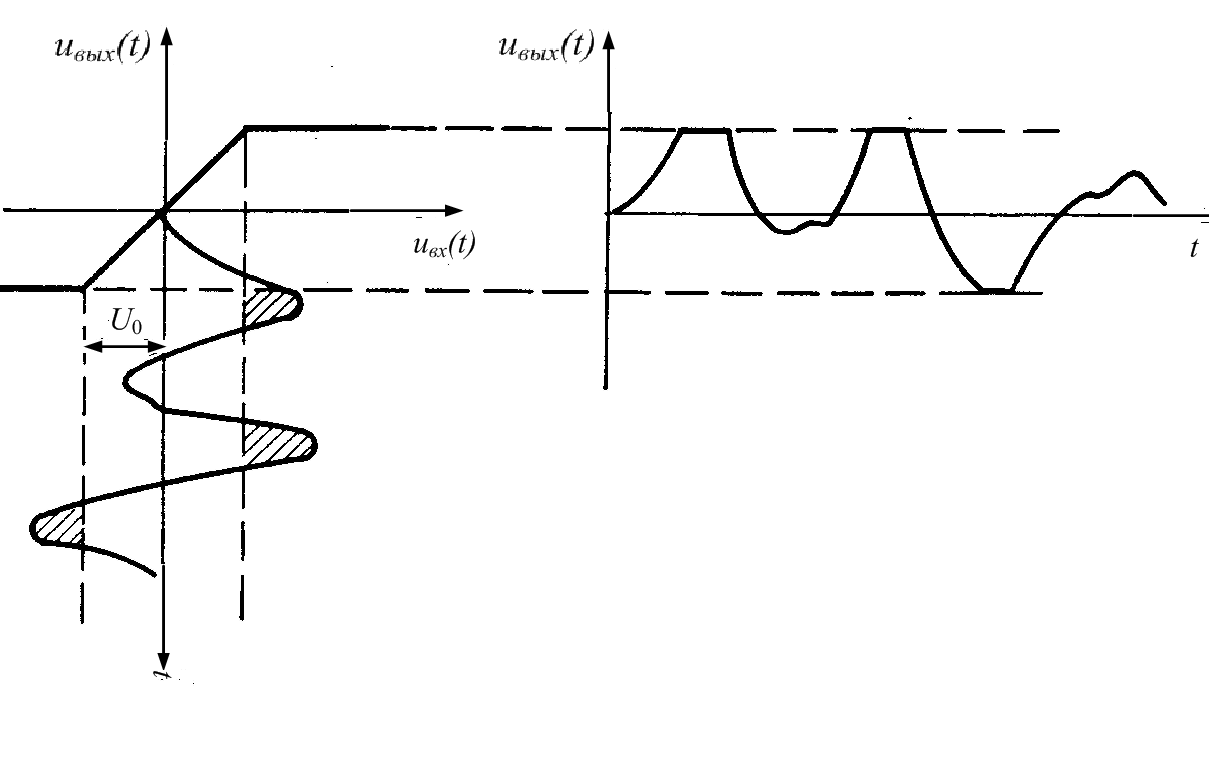
Маскирующий эффект при подавлении РЛС обзора создает преимущественно боковые составляющие спектра. Поэтому естественно стремление перераспределить мощность в пользу . Это до определенного предела удается сделать за счет предварительного двустороннего ограничения шумового напряжения, как показано на рис. 11, где приведены характеристика ограничителя и графики шумовых напряжений и . Основной характеристикой ограничителя является относительный уровень ограничения , где – абсолютный уровень ограничения шумов; – эффективное значение напряжения ограничиваемых шумов.
б
Рис. 10. Спектральные плотности:
а – модулирующих шумов; б – амплитудно-модулированной шумовой помехи
При росте и происходит перераспределение мощности передатчика в пользу . Можно показать, что при прочих равных условиях модуляция практически неограниченным шумом а0 = 3 дает , а при а00 (предельное ограничение) . В связи с этим для модуляции применяют только ограниченные по мгновенным значениям шумовые напряжения.
Но здесь следует иметь в виду одно обстоятельство. С ростом степени ограничения модулирующих шумов амплитуда АМ-шумов становится все более регулярной, а при предельном ограничении (при а00) она будет принимать только два значения – 1 и 0 (рис. 11,б). При этом, естественно, ухудшаются маскирующие свойства АМШП.
б
Рис. 11. Ограничение модулированных шумов в передатчике АМШП:
а – характеристика ограничителя; б – форма колебаний на выходе передатчика АМШП при глубоком ограничении модулирующего шума
В СВЧ-диапазоне преимущественно используют два типа передатчиков [4] АМШП – в виде автогенераторов на магнетронах и модуляторов на лампах бегущей волны (ЛБВ-О). Функциональная схема генератора на магнетроне (М) приведена на рис. 1
С генератора модулирующих шумов сигнал поступает на ограничитель и далее на модулятор. Последний представляет собой усилитель на мощных электронных лампах, включенных последовательно с магнетроном. Суммарный ток ламп должен быть равен номинальному току магнетрона.
Рис. 12 Функциональная схема передатчика АМШП на магнетроне
Магнетрон относится к автогенераторным устройствам замкнутого типа, т. е. при приложении между анодом и катодом определенного напряжения в нем возникают незатухающие колебания. Изменение анодного напряжения магнетрона наряду с амплитудой изменяет и частоту генерируемых колебаний. Поэтому модулирующие шумы ограничивают, а амплитуду колебаний выбирают так, чтобы напряжение (положительная волна модулирующего напряжения) соответствовало номинальному значению мощности генерируемых магнетроном колебаний, а напряжение (отрицательная полуволна шумовых колебаний) – срыву колебаний. В результате магнетрон работает в режиме прерывистой модуляции, а генерируемый им шум будет представлять помеховый сигнал, график которого показан на рис. 11,б.
Схема генератора для получения АМШП с использованием ЛБВ-О приведена на рис. 13. Кратко рассмотрим работу ЛБВ в режиме усиления СВЧ-колебаний. ЛБВ представляет собой вакуумный прибор, содержащий следующие элементы: 1 - катод с системой электростатической фокусировки электронного пучка (на рис. не показано); 2 – первый анод (управляющий током электрод); 3 – второй анод (ускоряющий электрод); 4 – металлическая спираль (замедляющий электрод); 5 – электромагнитная фокусирующая катушка; 6 – коллектор электронов; 7 – входной и выходной элементы связи спирали с входным и выходным волноводами или коаксиальными кабелями.
Сфокусированный и ускоренный анодами электронный поток поступает в пространство взаимодействия (внутренняя полость спирали) с переменным электрическим полем спирали. Последнее возникает в результате того, что во входном элементе связи подведенное к ЛБВ поле е(t)=Em0 cos 0t наводит ЭДС. Скорости электронов пучка e и фазовая скорость электромагнитного поля вдоль спирали подбираются примерно равными. При этом скорость распространения волны вдоль витков спирали будет близкой к скорости света. Между соседними витками спирали возникает переменное электрическое поле. Если направление вектора переменного электрического поля совпадает с направлением вектора скорости электронов, то последние ускоряются, отбирая часть энергии от спирали. И, наоборот, если электроны замедляются, то они передают часть своей кинетической энергии переменному электромагнитному полю спирали. Очевидно, что в соседних промежутках между витками спирали будут поля различных знаков. Поэтому часть электронов ускорится, а часть – замедлится. Непрерывный поток электронов, вошедших в пространство взаимодействия, разорвется, образуются чечевицеобразные их сгустки.

Рис. 13. Функциональная схема передатчика АМШП на ЛБВ-О
Изменением средней скорости электронов (напряжения на первом, а чаще на втором аноде) можно добиться получения таких фазовых соотношений между скоростью образующихся в пространстве взаимодействия сгустков электронов и фазовой скоростью волны вдоль оси спирали, при которой электроны преимущественно будут тормозиться и передача электронами энергии спирали существенно превзойдет ее отбор. В результате поле на выходе ЛБВ-О
,
где – коэффициент усиления ЛБВ по напряженности поля; – время распространения волны по спирали.
В режиме получения АМШП ЛБВ-О работает как усилитель с переменным значением коэффициента усиления . В этом режиме разведывательная часть станции радиопомех обеспечивает определение и длительное запоминание несущей частоты подавляемой РЛС f0, так что на вход ЛБВ поступают колебания . Устройство запоминания частоты (УЗЧ) в станции может и отсутствовать, а в ЛБВ модулируется принятый сигнал подавляемой РЛС. Так может реализоваться, например, АМШП на частоте сканирования антенны подавляемой РЛС. Модулирующие видеошумы с генератора поступают на двусторонний ограничитель и далее на модулятор. Последний в простейшем случае представляет собой транзистор, включенный последовательно в цепь питания первого анода. Изменение напряжения шумов um0(t), поданных на сетку лампы, вызывает изменение падения напряжения на внутреннем сопротивлении лампы . Напряжение на участке катод – первый анод ЛБВ-О при этом оказывается переменным, изменяющимся в такт с изменением подведенного шумового напряжения. Изменение прежде всего влияет на число электронов, попадающих в пространство их взаимодействия с полем спирали. Естественно, что пропорционален числу прошедших через ЛБВ электронов. Таким образом, изменения приводят к изменению и позволяют тем самым получить АМШП.
Если между , и существует прямая пропорциональная зависимость, то помеховый сигнал
где – мгновенное значение коэффициента помеховой модуляции поля. Однако одновременно модулируется и скорость электронов, а следовательно, и время пролета их через спираль . В результате возникает паразитная фазовая модуляция.
В самом деле, если , то текущая фаза колебаний будет меняться в такт с изменением модулирующих шумов. Часто это явление оказывается нежелательным из-за неизбежного расширения спектра помехового сигнала.
Для устранения паразитной фазовой модуляции шум стремятся предельно ограничить, а лампу модулятора ставят в режим коммутации тока. Как и в рассмотренном выше случае с использованием магнетрона, получаются прерывистые колебания. Их график показан на рис. 11, б.
Реально достижимое значение коэффициента усиления ЛБВ-О средней и большой мощности составляет 25…40 дБ, то есть несколько ниже, чем у многорезонаторных клистронов (60 дБ). В маломощных ЛБВ-О коэффициент усиления может достигать 60 дБ.
Рассмотренные схемы передатчиков шумов применяют преимущественно для получения узкополосных шумовых сигналов, например, при создании помех на частоте сканирования.
2.3. Построение передатчика шумовых радиопомех с фазовой модуляцией
ФМШП представляют собой высокочастотные колебания, мгновенные значения начальной фазы которых изменяются во времени по закону изменения напряжения um(t) модулирующего шума. Аналитическое выражение помехового сигнала этого вида имеет вид
,
где – приращения фазы помехового сигнала, изменяющиеся во времени по случайному закону; – крутизна фазовой модуляционной характеристики передатчика.
Для получения ФМШП необходимо иметь СВЧ-прибор с более или менее линейной фазовой характеристикой. Существует много способов получения таких сигналов. Но в СВЧ-диапазоне наиболее часто для этой цели используются ЛБВ-О [4].
Отличие передатчика ФМШП (рис. 14) от только что рассмотренного АМ-передатчика (см. рис. 13) состоит только в том, что лампа модулятора Л (или транзистор) включается последовательно в цепь питания второго анода, а ограничитель отсутствует, то есть модулирующие шумы подаются с генератора непосредственно на управляющую сетку лампы.
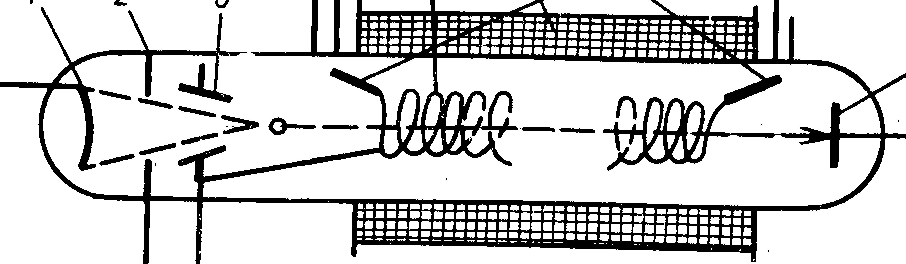
Рис. 14. Функциональная схема передатчика ФМШП на ЛБВ-О
Если на вход ЛБВ поступают колебания вида
е(t)=Em0 cos 0t,
то, как уже было показано выше, колебания на ее выходе будут определяться выражением
,
где – время запаздывания (распространения) электромагнитной волны в ЛБВ.
При условии скорость электрона, попадающего в пространство взаимодействия с электромагнитным полем спирали, определяется в основном ускорением его полем второго анода и определяется выражением
,
поскольку, где а – ускорение, которое находится из равенства сил , пройденный путь (рис. 15), откуда время пролета , средняя скорость движения
.
Здесь – скорость электрона, приобретенная за счет его ускорения полем между первым анодом и катодом; е, m – заряд и масса электрона соответственно; kэ – коэффициент пропорциональности.
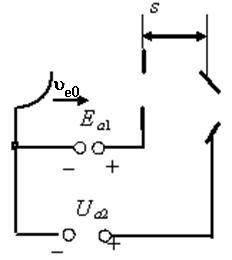
Рис. 15. К выводу формулы скорости движения электрона
Ускоряющее напряжение за счет изменения шумовым напряжением внутреннего сопротивления лампы модулятора приобретает переменную составляющую, изменяющуюся по случайному закону. Очевидно, что , где – переменное сопротивление модулятора, изменяющееся за счет изменений напряжения на транзисторе; i – ток, протекающий в лампе модулятора; Ua0 – постоянное (среднее) падение напряжения в модуляторе.
Скорость электронов, влетающих в пространство между первым и вторым анодом, e0 существенно меньше ее приращения за счет поля второго анода. Поэтому, можно считать, что
,
где – коэффициент пропорциональности.
Строго говоря, ток i зависит от напряжения на участке катод - второй анод ЛБВ. Из-за этого возникает паразитная амплитудная модуляция усиливаемых колебаний. Но этот процесс проявляется значительно слабее, чем результат модуляции скорости электронов. Поэтому на формирование спектра Gп(f) преобладающее влияние оказывает модуляция скорости электронного потока и обусловленная этим фазовая модуляция усиливаемых колебаний. Если длина спирали равна L, то время пролета электроном пространства взаимодействия
Зависимость является существенно нелинейной. Но всегда можно некоторый небольшой участок характеристики аппроксимировать линейной зависимостью, полагая
,
где , k2 – коэффициент пропорциональности.
Промодулированные по скорости электроны по-прежнему будут отдавать ему часть своей кинетической энергии. При этом изменения скорости электронов будут изменять фазу, в которой сгустки электронов будут передавать свою энергию полю спирали. Волна деформируется, превращаясь по мере распространения по спирали из синусоидальной в сложное, полигармоническое колебание, первая гармоника которого приобретает фазу, определяемую фазой взаимодействия электронных сгустков с волной.
Подставив в это выражение, получим
.
Теперь – постоянный фазовый сдвиг усиливаемых колебаний, a – переменный, обусловленный модуляцией шумом, набег фазы. В результате получим
.
Таким образом, изменение скорости электронов на входе замедляющей системы по закону модулирующих шумов позволяет получать ФМШП.
Важнейшими преимуществами ФМШП по сравнению с АМШП являются:
- отсутствие (при достаточно глубокой модуляции) в ее спектре несущего колебания;
- возможность простым изменением коэффициента усиления модулятора, то есть um(t), в весьма широких пределах менять ширину спектра помехового сигнала.
Характерной особенностью модуляции по фазе является зависимость глубины модуляции от частоты модулирующего сигнала, т. е. повышение роли (подчеркивание) в спектре помехового сигнала высокочастотных составляющих спектра модулирующих шумов um(t). Действительно, по определению текущая частота сигнала , где – текущая фаза колебаний, то есть
.
Следовательно, чем выше частота составляющей спектра модулирующего сигнала, тем большую девиацию 0 она вызывает .
Однако изменение в широких пределах нарушает оптимальные соотношения скоростей сгустков электронов и фазы волны вдоль оси ЛБВ. Возникает глубокая паразитная амплитудная модуляция, падает Рп.п. Поэтому в станциях помех с фазовой модуляцией преимущественно получают узкополосные шумы для подавления РЛС с непрерывным и квазинепрерывным излучением.
Ограничение модулирующих шумов при фазовой модуляции недопустимо. Это связано с тем, что при ограничении в спектре ФМШП появится регулярная составляющая, что резко снижает эффективность рассматриваемого вида радиопомех.
2.4. Построение передатчика шумовых радиопомех с частотной модуляцией
ЧМШП называют непрерывное колебание, у которого текущее значение частоты изменяется по закону изменения модулирующих шумов, то есть
,
где – крутизна модуляционной (по частоте) характеристики передатчика помех.
Так как текущие значения фазы и частоты связаны соотношением , частотно-модулированный помеховый сигнал можно записать в виде
.
Отсюда следует, что для получения колебаний указанного вида необходимо иметь генератор, у которого частота генерируемых колебаний прямо пропорциональна напряжению модулирующих шумов.
Часто в передатчиках ЧМШП в качестве генераторного устройства используют лампы обратной волны с ортогональными (скрещенными) электрическим и магнитным полями – ЛОВ-М [4].
Работу такого передатчика рассмотрим с помощью схемы, приведенной на рис. 16. Здесь: 1 – катод с системой фокусирования луча; 2 – управляющий электрод; 3 – замедляющая система; 4 – поглотитель электромагнитной энергии; 5 – коллектор электронов; 6 – холодный катод; 7 – элемент связи замедляющей системы с волноводом.
Примерный вид траектории движения электронов е под воздействием скрещенных магнитного и электрического полей показан пунктиром. Для продольного расположения электродов это будет циклоида.
Существенное отличие приборов типа М от приборов типа О, например ЛБВ-О, состоит в том, что в первых в энергию СВЧ-поля преобразуется не кинетическая, а потенциальная энергия электронов. Достигается это за счет использования в них для управления электронами взаимно-перпендикулярных электрического Е и магнитного В полей. Последнее создается постоянным магнитом, силовые линии поля которого ортогональны силовым линиям поля Е, создаваемого напряжениями на управляющем электроде и холодном катоде. Электроны, эмиттированные катодом, фокусируются в тонкую ленту, ширина которой равна поперечному размеру штырей замедляющей системы.
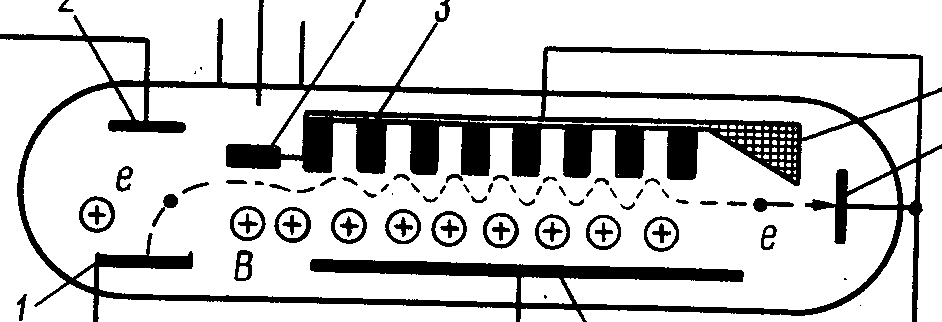
Рис. 16. Функциональная схема передатчика ЧМШП на ЛОВ-М
Под воздействием скрещенных полей на начальном участке траектории (до входа в пространство взаимодействия) электроны движутся по циклоиде, т. е. участвуют в двух движениях: поступательном – под действием поля ускоряющего электрода и вращательном – под воздействием магнитного поля.
Если электроны в момент вхождения в пространство взаимодействия имеют «правильную» начальную скорость e = E/B (E – напряженность электрического поля, создаваемого разностью потенциалов анода и холодного катода; В – магнитная индукция, создаваемая постоянным магнитом), то дальнейшая траектория электронов будет представлять собой прямую линию, проходящую между анодом и холодным катодом. «Выравнивание» циклоиды объясняется тем, что электрическая сила, притягивающая электрон к аноду, уравновешивается магнитной силой, закручивающей электрон по часовой стрелке. Таким образом, при правильно выбранной скорости вхождения электронов в пространство взаимодействия между анодом и холодным катодом на коллектор будет проходить сфокусированный в ленту поток электронов. Расстояние электрона от холодного катода определяет значение его потенциальной энергии. Если электрон достигает замедляющей системы, то последняя равна нулю. Когда электрон находится у холодного катода, то она максимальна.
Если в одной из ячеек замедляющей системы возникнут колебания (например, за счет флюктуации тока луча), то за счет связи они возбудят колебания в соседних элементах. По замедляющей системе начинают распространяться в обе стороны – навстречу электронному потоку – обратная волна, попутно с ним попутная или прямая волна. Прямая волна, достигнув поглотителя 4, поглощается в нем почти полностью, а встречная наращивает свою энергию за счет отбора потенциальной энергии от электронов луча.
Переменное электрическое поле, возникающее между штырями замедляющей системы, своими силовыми линиями «провисает» в пространстве взаимодействия. Его силовые линии представляют собой кривые, соединяющие соседние штыри. Формирование сгустков электронов происходит примерно так же, как и в ЛБВ-О. При этом в процессе участвует не только переменное электрическое поле замедляющей системы, но и поле постоянного магнита. Модуляция скоростей электронов в луче приводит не только к образованию их сгустков, но и к смещению сгустков относительно замедляющей системы: заторможенный электрон приближается к аноду, передавая часть своей потенциальной энергии переменному полю, а ускоренный удаляется от анода и отбирает из переменного поля часть его энергии.
Задача поддержания положительного баланса передачи энергии переменному полю обратной волны (тем самым поддержание незатухающих колебаний) достигается за счет выбора переносной скорости сгустков электронов, имеющей такое значение, при котором модуль фазовой скорости обратной волны |ф|= e, т.е. сгустки, каждый раз оказывается между зазорами замедляющей системы в момент, когда поле для них оказывается тормозящим.
Колебательная система ЛОВ-М за счет связи между отдельными ее элементами имеет множество резонансных частот. Поэтому в ней в момент возникновения колебаний распространяется множество волн (гармоник). Но поддерживается и нарастает только та из них, для которой выполняется условие |ф|= e. Следовательно, изменив e, можно изменить частоту гармоники, для которой существуют наиблагоприятнейшие условия для передачи энергии электронов полю замедляющей системы, т.е. частоту генерируемых колебаний. Характер зависимости частоты генерируемых колебаний от напряжения на ее электродах и процесс получения ЧМШП иллюстрируются рис. 17.
Для настройки передатчика помех на центральную частоту подавляемой РЛС изменяют напряжение на управляющем электроде (см. рис. 16) . Для модуляции по частоте изменяют напряжение на холодном катоде по закону , где – падение напряжения на транзисторе.
У ЧМШП, получаемых с помощью ЛОВ-М, имеются несомненные преимущества перед АМШП:
- изменением величины напряжения модулирующих шумов можно в широких пределах изменять ширину спектра помехового сигнала, ставя передатчик в режим создания прицельных или заградительных по частоте помех;
- при достаточно глубокой модуляции, когда ширина спектра помехового сигнала Dfп хотя бы в 2…3 раза превосходит ширину спектра модулирующих шумов, в получаемом сигнале отсутствует несущее колебание и, следовательно, вся мощность автогенератора расходуется рационально – участвует в создании маскирующего эффекта в подавляемой РЛС.
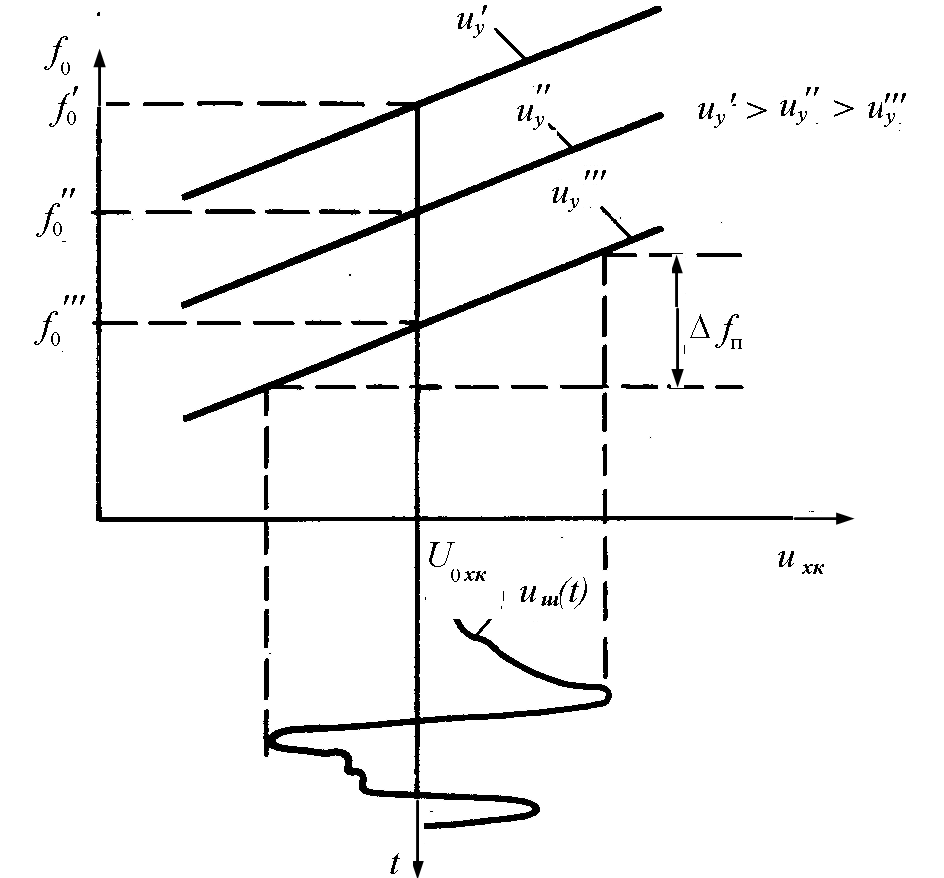
Рис. 17. Модуляционная характеристика генератора ЧМШП на ЛОВ-М
Спектральная плотность ЧМШП по форме близка к плотности вероятности мгновенных значений .
Можно показать, что при эффективном значении индекса частотной модуляции mЧМ>>1 ширина спектра помехового сигнала Dfп =2DFШmЧМ.
Эффективное значение индекса частотной модуляции mЧМ определяется как отношение эффективного значения отклонения частоты Dэф от 0 к максимальной частоте модулирующего сигнала FШmax.
ЧМШП применяются преимущественно для создания заградительных помех, для которых Dfп >>Dfпр. При выполнении этого условия частотно-модулированные колебания в приемнике превращаются в амплитудно-модулированные, а точнее в импульсы, случайные по моментам появления и амплитуде (рис. 18).
Рис. 18. Характер воздействия широкополосных ЧМШП
на приемник импульсной РЛС
Здесь Кпрм(f) – амплитудно-частотная характеристика приемника; fп – центральная частота спектра помех; – напряжение на выходе линейной части приемника подавляемой РЛС; fп(t) – закон изменения текущей частоты помех.
Так как частота помехового сигнала случайна, то моменты ее попадания в полосу приемника Dfпрм также случайны.
К настоящему времени хорошо разработаны и находят применение устройства защиты РЛС от импульсных помех, именуемые схемами ШОУ, что расшифровывается как выполнение входных цепей приемника в виде последовательно соединенных широкополосного усилителя (Ш), двустороннего симметричного ограничителя (О) и узкополосного усилителя (У). Эффективность схем ШОУ тем выше, чем больше отношение kш = Dfп/DFш.
2.5. Принцип действия передатчика хаотических импульсных радиопомех
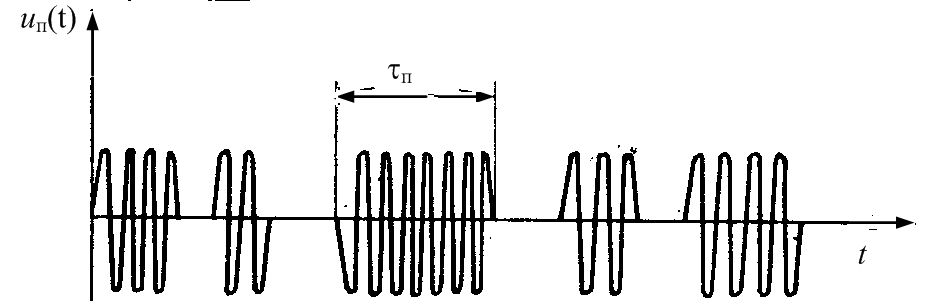
Хаотической импульсной помехой (ХИП) принято называть сигнал, представляющий собой последовательность радиоимпульсов, у которых длительность tи, амплитуда Um, период следования Tп являются случайными величинами, а несущая частота f0=const. Однако энергетически выгодно применять помехи, у которых Um=const. В этом случае генераторное (усилительное) устройство передатчика используется в наивыгоднейшем режиме, а в СВЧ-диапазоне устраняется неизбежная паразитная модуляция колебаний по текущей фазе.
Могут использоваться и ХИП, у которых только один параметр – является случайным, а tи =const.
Упрощенная структурная схема передатчика ХИП с использованием видеошумов [4] представлена на рис. 19,а. Графики, поясняющие работу устройства, приведены на рис. 19,б.
Видеошумы uш(t), усиленные до необходимой величины, подаются на пороговое формирующее устройство. В качестве последнего используют заторможенный мультивибратор или блокинг-генератор.
Для получения случайных импульсных последовательностей, у которых должны быть случайными как tи, так и Tп, применяется триггер Шмитта, который представляет собой пороговое устройство, срабатывающее при uш(t) U0, (U0 - порог срабатывания) и возвращающееся в исходное положение, когда uш(t)<U0. Полученная таким образом последовательность импульсов uи(t) поступает в качестве модулирующего напряжения на генератор СВЧ-колебаний, в котором превращается в последовательность радиоимпульсов. Настройка автогенератора на частоту подавляемого РЭС противника f0 осуществляется по сигналам разведприемника.
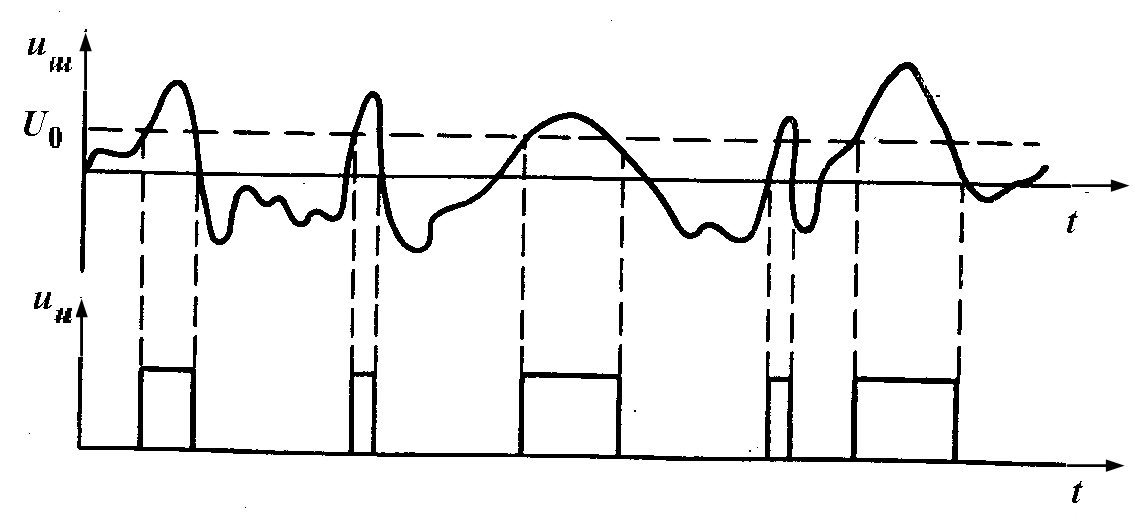
б
Рис. 19. Передатчик хаотических импульсных радиопомех:
a – структурная схема; б – графики напряжений Шмитта
на входе и выходе триггера
Если в качестве исходного используется гауссов шум с шириной спектра FШ, то среднее значение числа импульсов в секунду определяется по формуле
,
где – среднеквадратическое значение напряжения шумов.
2.6. Принцип действия передатчика многократных ответных импульсных радиопомех
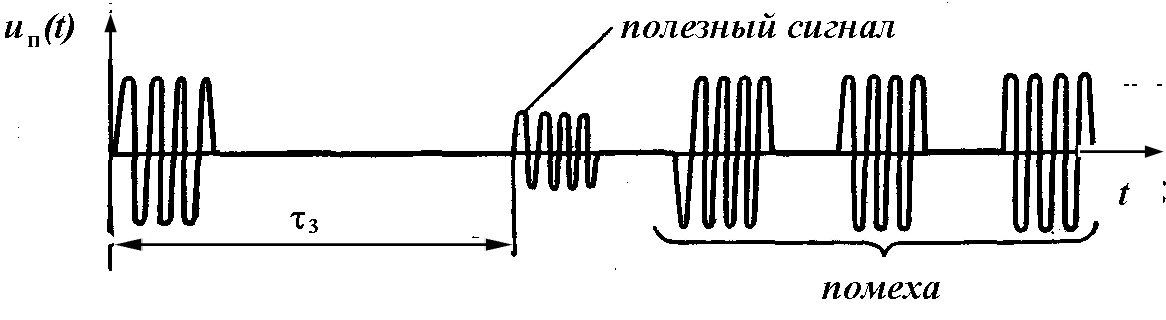
Многократные импульсные ответные помехи (МОП) представляют собой серию из N радиоимпульсов, излучаемых передатчиком помех в ответ на прием каждого импульса подлежащей подавлению РЛС.
Помеховый сигнал на входе приемника подавляемой РЛС можно представить в виде, показанном на рис. 20,а [4].
а
б
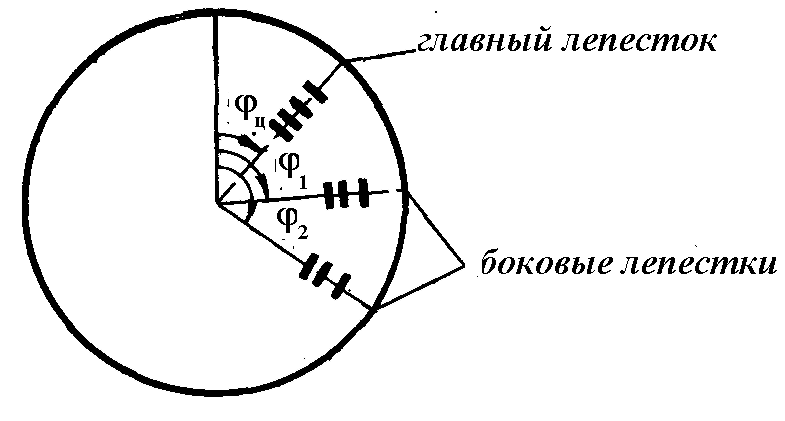
Рис. 20. Многократная ответная импульсная помеха:
а – мгновенное значение сигналов на входе РЛС; б – вид экрана ИКО при воздействии МОП
На экране индикатора РЛС обзора такая помеха будет имитировать N целей (боевой порядок), следующих непосредственно за постановщиком помех. В ряде случаев удается имитировать ложные цели и на направлениях, существенно отличающихся от азимута цели (1 и 2 на рис. 20,б). Такая возможность связана с тем, что сравнительно просто обеспечить существенное превышение мощности помехового сигнала над мощностью полезного сигнала, так как станция помех работает в импульсном режиме. В этом случае возможен прием помеховых сигналов по боковым лепесткам диаграммы направленности антенны РЛС. Это означает, что на экране РЛС могут появиться несколько серий отметок ложных целей (на азимутах 1 и 2 на рис. 20,б). Использование этого вида помех не исключает возможности обнаружения их постановщика.
Нет принципиальных технических трудностей и для имитации отметок ложных целей, упреждающих на экране РЛС отметку постановщика помех. Для этого необходимо в передатчике помех осуществить задержку принятого сигнала РЛС на время Тп–t3< Dt < Тп, где t3 — время запаздывания зондирующего сигнала в РЛС. В этом случае импульсы МОП, генерируемые в ответ на первый импульс РЛС, «перейдут» в i + 1-й период повторения, а их отметки упредят отметку постановщика помех на экране индикатора подавляемой РЛС.
Упрощенная структурная схема станции МОП представлена на рис. 21. Сигналы подавляемой РЛС, принятые антенной станции помех, усиливаются в УРЧ, поступают на устройство длительного запоминания несущей частоты и на амплитудный детектор. В устройстве длительного запоминания несущей частоты принятый импульс превращается в непрерывное колебание, имеющее частоту, близкую к частоте РЛС f0. Чтобы воздействие помех на РЛС было эффективным, разность частот | f0- fп| не должна превышать половины полосы пропускания приемника, т. е. в любом случае должно выполняться условие
| f0- fп|fпрм/
Рис. 21. Структурная схема передатчика МОП
Если передатчик МОП не рассчитан на «перенос» импульсов помех из i-гo в i+1-й период повторения, вместо устройства длительного запоминания частоты может использоваться устройство кратковременного запоминания, что существенно упрощает схему передатчика.
В амплитудном детекторе выделяется огибающая сигнала РЛС. После усиления и задержки импульс, выделенный амплитудным детектором, запускает генератор пачки видеоимпульсов. Последний работает так, что на каждый поступающий на его вход импульс выдает серию из N импульсов.
3. Оценка эффективности РЭП
3.1. Эффективность функционирования РЭС в условиях РЭП
Создание радиопомех РЛС обнаружения, наведения и целеуказания (ОНЦ) исключает или затрудняет возможность обнаружения, определения координат и параметров движения целей, вносит ложную информацию о воздушной обстановке. В результате в последующем ухудшаются условия для решения задач по целераспределению, выработки команд целеуказания активным средствам ПВО и команд наведения на воздушные цели.
Показатели качества обнаружения воздушных целей РЛС ОНЦ, количество и достоверность информации, получаемой с их помощью, могут быть изменены маскировкой и имитацией сигналов, отраженных от целей.
Для маскировки применяют активные шумовые и пассивные радиопомехи.
На рис. 22, а покажем вид индикатора кругового обзора РЛС [4] при отсутствии радиопомех. При воздействии на РЛС ОНЦ активных шумовых радиопомех на экране индикатора кругового обзора (ИКО) образуются засвеченные секторы (рис. 22,б). В их пределах ухудшаются условия наблюдения отметок от целей – уменьшается вероятность правильного обнаружения целей (при фиксированном значении вероятности ложной тревоги) или увеличивается вероятность ложной тревоги (при фиксированном значении вероятности правильного обнаружения).
а б
Рис. 2 Вид экранов индикатора кругового обзора РЛС ОНЦ:
а – при отсутствии радиопомех; б – при наличии радиопомех
Интенсивность засветки индикатора в пределах сектора при воздействии радиопомех различна – она максимальна при совпадении максимума ДНА с направлением на источник радиопомех и спадает к его границам. Неодинаковы будут и условия наблюдения, и соответственно значения вероятностей обнаружения отметок целей, находящихся в пределах засвеченного сектора (при этом предполагается, что ЭПР всех целей равны). Иными словами, при создании радиопомех могут возникать такие условия обнаружения, при которых часть целей в пределах лоцируемого пространства не обнаруживается, другая часть обнаруживается, но с вероятностями меньше заданных. Наряду с отметками реальных целей на экране индикатора имеются и отметки, возникающие за счет воздействия помех. Некоторые из них будут фиксироваться как отметки истинных целей.
Для маскировки сигналов, отраженных от целей пассивными радиопомехами, применяют противорадиолокационные отражатели (ПРЛО). Они выбрасываются в больших количествах в тех областях пространства, где находятся прикрываемые (маскируемые) самолеты. Помеховые сигналы на входе РЛС возникают за счет отражения ее сигналов от протяженных искусственных образований. Воздействие этих сигналов приводит к образованию на экране РЛС ОНЦ засвеченных участков, в пределах которых, так же как и в пределах засвеченных секторов, ухудшаются условия наблюдения отметок целей.
Таким образом, подавление РЛС ОНЦ путем маскировки полезных сигналов помеховыми приводит к полной или частичной потере информации о воздушных целях, что сказывается на эффективности применения активных средств ПВО.
Имитация сигналов, отраженных от целей, при подавлении РЛС ОНЦ может быть осуществлена созданием активных (однократных и многократных) ответных радиопомех и пассивных радиопомех. Пассивные радиопомехи создаются сбрасыванием с самолетов через дискретные промежутки времени ПРЛО и ложных целей.
При воздействии имитирующих помех на экране ИКО РЛС помимо отметок истинных целей наблюдаются ложные отметки целей (рис. 23).
Общее количество отметок может существенно превышать количество реальных целей. Если параметры помеховых сигналов при этом близки к параметрам полезных сигналов, то возможность распознавания истинных целей затрудняется или исключается. Целераспределение может быть произведено по ложным отметкам – несуществующим целям.
Радиоэлектронное подавление командных радиолиний управления (КРУ) и РЭС связи приводит к искажению команд наведения на воздушные цели, передаваемых с наземного (воздушного) пункта управления, или созданию ложных команд наведения.
Рис. 23. Вид экрана индикатора кругового обзора РЛС ОНЦ при воздействии имитирующих помех
Искажение команд наведения возможно путем маскировки сигналов. Для маскировки применяют активные непрерывные шумовые помехи или хаотические импульсные помехи. Ложные команды создаются имитацией сигналов. Параметры помеховых сигналов при этом отличаются от параметров сигналов, несущих информацию об истинных значениях передаваемых команд. В результате подавления КРУ и РЭС связи может быть увеличена ошибка или снижена вероятность наведения на воздушную цель.
В состав РЭС управления оружием входят системы автоматического сопровождения цели (АСЦ) по дальности, направлению и скорости. Характерными режимами работы этих систем являются режимы поиска и автоматического сопровождения по указанным параметрам. Поэтому при организации РЭП решаются различные по конечному эффекту воздействия задачи [4].
1. Создание помех может воспрепятствовать переходу РЭС из режима поиска цели в режим ее автоматического сопровождения по одному или одновременно по нескольким параметрам.
Воздействие помех может внести ошибку или осуществить срыв АСЦ по дальности и скорости.
3. Воздействие помех может перевести РЭС из режима сопровождения истинной цели на сопровождение ложного (помехового) сигнала или ложной цели (ловушки).
Отмеченные эффекты достигаются маскировкой сигналов, отраженных от цели помеховыми сигналами, имитацией таких сигналов с внесением ложной информации в значения их параметров, увеличением количества пространственно разнесенных источников помех, применением ловушек и т.д.
Для РЭП РЭС управления оружием применяются различные виды имитирующих радиопомех. По своей структуре радиопомехи близки к структуре сигналов, отраженных от цели. Они отличаются только значениями отдельных параметров (например, амплитудой, частотой и фазой огибающей, временным положением, приращением частоты, поляризацией) или законом изменения параметров во времени. Ввиду близости по структуре полезного и помехового сигналов реакция РЭС (конечный эффект) на воздействие помех аналогична реакции на полезный сигнал (при условии, что действует только помеховый сигнал).
В качестве примеров имитирующих радиопомех РЭС с АСЦ можно указать на радиопомехи, прицельные по частоте сканирования (системам АСН с коническим сканированием), помехи, уводящие по дальности или скорости, системам АСД или АСС. Так как параметры помехового сигнала отличаются от параметров полезного сигнала, то в системе АСЦ возникают ошибки сопровождения цели. Если при этом параметр изменяется во времени (увод по дальности или скорости), то и величина ошибки будет изменяться во времени.
Специфичны виды и способы создания радиопомех моноимпульсным системам АСН. Для их подавления помеховые сигналы необходимо излучать как минимум из двух точек пространства. В качестве помеховых сигналов используют непрерывные (некогерентные, когерентные) или прерывистые (мерцающие) сигналы. При воздействии помех из двух точек в системе АСН могут возникать ошибки сопровождения источников излучения или может увеличиваться угол, при котором наступает разрешение одного из источников по угловым координатам.
Из краткого качественного рассмотрения примеров создания радиопомех РЭС можно заключить, что подавление РЭС снижает эффективность функционирования систем управления войсками и оружием, эффективность применения активных средств и управляемого оружия.
На эффективность РЭП влияют многие факторы: знание структуры построения, принципов и специфики функционирования РЭС, выбор вида помехового сигнала, средств создания помех и способа их применения, достоверность оценки возможных контрмер противника и т. д. Добавим к этому то, что степень влияния эффективности функционирования РЭС различного назначения на конечный результат неодинакова. Другими словами, определить и использовать какой-то единый обобщенный критерий для оценки эффективности РЭП не представляется возможным. Известны и нашли применение частные критерии: оперативно-тактические, энергетические и информационные.
3.2 Оперативно-тактические критерии эффективности РЭП
Оперативно-тактические критерии позволяют оценить эффективность мероприятий по организации РЭП (эффективность используемых средств и способов РЭП).
Эффективность выполнения поставленной боевой задачи можно оценить вероятностью [4]. Уничтожение объекта возможно при условии совместного наступления трех событий: преодоления системы ПВО противника самолетами ударной группы, обнаружения цели и ее поражения. Можно считать, что эти события независимы и возникают последовательно друг за другом. Тогда вероятность выполнения боевой задачи можно определить по формуле
,
где – вероятности преодоления ПВО, обнаружения цели и ее поражения соответственно.
Эти вероятности зависят от эффективности функционирования РЭС систем управления ПВО противника и бортовых РЭС самолетов.
Организуя РЭП РЭС систем управления ПВО, можно существенно снизить эффективность их функционирования и тем самым повысить вероятность до значения . Эффективность РЭП РЭС систем управления ПВО можно оценить при этом отношением
Если мероприятия по РЭП РЭС увеличивают , то их проведение является обоснованным. Чем больше , тем выше эффективность принимаемых мер по РЭП. В этом случае вероятность тоже увеличивается.
Следовательно, в качестве общего оперативно-тактического критерия эффективности РЭП следует использовать вероятность и коэффициент эффективности .
Самолетам оказывают противодействие активные средства (ИП, ЗРК и ЗСК). Зоны их действия обычно разграничены и не пересекаются или пересекаются частично. Поэтому можно считать, что события сбития самолетов указанными средствами являются независимыми. Вероятность преодоления системы ПВО каждым самолетом ударной группы равна
,
где – вероятности сбития самолета ударной группы ИП, ЗРК и ЗСК.
Вероятность сбития отдельного самолета группы любым оружием ПВО при независимых пусках УР (выстрелах ЗСК) рассчитывается по формуле
.
Здесь – вероятность сбития самолета при одной атаке ИП (пуске одной ЗУР, одном выстреле ЗСК); n – среднее число атак ИП по одному самолету (среднее число пусков ЗУР или выстрелов ЗСК).
Повышением эффективности применения средств и способов РЭП достигается уменьшение числа атак и снижение вероятности сбития самолета соответственно до величин nрэп и .
Вероятность сбития и определяется в результате проведения теоретических расчетов и моделирования, которые проверяются при испытаниях в полигонных условиях, приближенных к реальной боевой обстановке.
Величины nрэп и количественно характеризуют эффективность РЭП РЭС систем управления ПВО и могут быть использованы для оценки вероятностей и . Уменьшение n до nрэп и до снижает вероятность и в конечном счете увеличивает вероятность .
Для сравнительной оценки эффективности различных способов применения средств РЭП могут служить также величины:
x =/, a= nрэп /n.
Чем меньше значения x и a, тем эффективнее мероприятия по РЭП РЭС систем управления ПВО.
Уменьшение числа n атак (пусков УР, выстрелов ЗСК) до величины nрэп достигается умелой организацией преодоления системы ПВО, применением ложных целей, уменьшением дальности действия РЛС АСЦ.
Число атак n по самолету ударной группы можно уменьшить до nрэп применением т ложных целей. При этом коэффициент a становится равным величине
a= nрэп /n =1/(m+1).
РЭП РЛС систем управления оружием (РЛС АСЦ) в зависимости от вида применяемых радиопомех приводит к различным последствиям. Одним из них является недопущение захвата цели и перевода РЛС в режим автосопровождения. Следствием такого воздействия радиопомех на РЛС АСЦ является уменьшение дальности ее действия до величины .
Во всех рассмотренных случаях коэффициент a характеризует степень уменьшения числа атак ИП (пусков УР, выстрелов ЗСК) при РЭП РЭС систем управления ПВО и может быть использован в качестве одного из частных критериев оценки эффективности РЭП. В качестве частных критериев оценки эффективности РЭП могут также использоваться  , x и др.
, x и др.
Уменьшение вероятности достигается созданием радиопомех различного вида РЛС АСЦ систем управления оружием ПВО. Например, при воздействии радиопомех на систему АСН появляются ошибки в определении угловых координат цели и их производных. Вследствие этого увеличивается конечный промах ракеты или снаряда. Конечный промах определяется минимальным расстоянием между целью и ракетой (снарядом), при котором ракета проходит мимо цели, не поразив ее. При этом вероятность уменьшается до величины . В частном случае эта вероятность в результате воздействия помех может стать равной нулю.
Ошибки в измерении координат цели и их производных, возникающие при действии радиопомех, могут быть случайными и систематическими. Систематическая ошибка в измерении угловой координаты цели может быть создана, например, переводом РЛС АСЦ на сопровождение буксируемой радиолокационной ловушки (рис. 24). В этом случае при выстреле из точки 1 снаряд будет направлен в точку 2 с угловой ошибкой j и пройдет мимо цели с конечным промахом . Ошибка j и промах определяются расстоянием (базой) L между целью и ловушкой и соотношением ЭПР цели и ловушки. Величина промаха будет расти при увеличении ЭПР ловушки.
Рис. 24. Перевод РЛС АСЦ на сопровождение буксируемой радиолокационной ловушки
При rпор (rпор – радиус поражения боевой части ракеты) вероятность поражения цели принимают равной нулю. При <rпор . В данном случае в качестве частного критерия эффективности может быть принята величина конечного промаха .
Ошибка j и конечный промах являются в общем случае случайными величинами. Для приближенных расчетов закон распределения величины конечного промаха считают гауссовым:
.
Здесь a –математическое ожидание промаха; – дисперсия промаха.
Закон распределения промахов графически изображен на рис. 25. Заштрихованная под кривой область определяет вероятность поражения цели при возникновении в РЛС АСЦ систематических и случайных ошибок в определении координат и параметров движения цели.
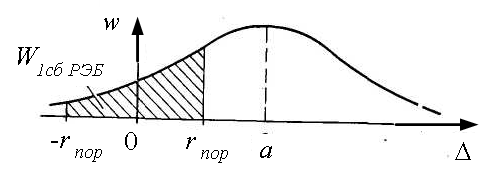
Рис. 25. Закон распределения промахов
Вероятность сбития самолета может быть определена по формуле
,
где – интеграл вероятности.
Из этой формулы следует, что зависит не только от rпор, но и от а и .
При отсутствии радиопомех конечный промах ракеты (снаряда) определяется так называемым техническим рассеянием, возникающим вследствие различных факторов (асимметрии ракеты, неравномерности тяги двигателя, различия скоростей полета снарядов, неоднородности атмосферы и др.). Математическое ожидание промаха в этом случае равно нулю, а его дисперсия – достаточно малая величина. Вероятность поражения цели близка к единице (рис. 26).
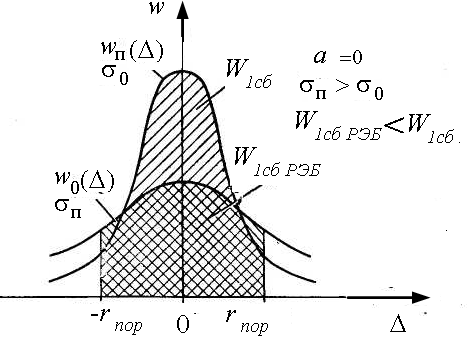
Рис. 26. Изменение вероятности поражения цели при возникновении случайных ошибок
Создание радиопомех РЛС АСЦ приводит к возникновению систематической и случайной ошибок в определении координат и параметров движения цели и увеличению дисперсии  промахов.
промахов.
При отсутствии систематических ошибок вероятность сбития цели можно определить по формуле
.
Если при воздействии радиопомех создается только систематическая ошибка а, то вероятность поражения цели , так же как в предыдущем случае, уменьшается (рис. 27). Изменение вероятности поражения цели при возникновении случайных и систематических ошибок показано на рис. 28.
Таким образом, чем меньше вероятность , тем эффективнее принятые меры РЭП и выше вероятности преодоления системы ПВО и выполнения боевой задачи самолетами ударной группы.
3.3. Энергетический критерии эффективности РЭП
Создание радиопомех РЭС системам управления войсками и оружием ПВО связано с «расходованием» электромагнитной энергии или средств создания пассивных помех (например, противорадиолокационных отражателей). Эффективность расходования электромагнитной энергии или средств создания пассивных помех оценивается с помощью энергетических критериев. Важнейшим из них является так называемый коэффициент подавления.
Рис. 27. Изменение вероятности поражения цели при возникновении систематических ошибок
Рис. 28. Изменение вероятности поражения цели при возникновении случайных и систематических ошибок
Для РЭП РЭС необходимо обеспечить на входе его приемника определенное отношение мощности помехового сигнала к мощности полезного сигнала . При оценке эффективности РЭП отношение принято определять на входе или выходе линейной части приемника. Минимально необходимое отношение мощности помехового сигнала к мощности полезного сигнала на входе (выходе) линейной части приемника в пределах его полосы пропускания, при котором обеспечивается подавление РЭС с заданной эффективностью, называют коэффициентом подавления
.
Значение зависит от вида радиопомех, структуры построения приемоиндикаторного тракта РЛС и заданного эффекта подавления (ущерба). Например, при подавлении РЛС ОНЦ непрерывными шумовыми помехами () ухудшение качества обнаружения целей можно оценить по характеристикам обнаружения.
Уменьшение отношения по энергии сигнал/помеха на входе приемника под воздействием радиопомех приводит к изменению значений вероятностей правильного обнаружения WПО и ложной тревоги WЛТ, при котором решение задачи целераспределения и наведения ИП становится невозможным. РЛС считается подавленной, если WПО 0.5 и WЛТ 10-5.
Знание величины позволяет осуществить РЭП РЛС с наименьшими энергетическими затратами, определить границы и размеры области пространства (зоны подавления), прикрытой радиопомехами (k) , и зоны неподавления (k<).
Величина при подавлении однотипных РЛС различными видами радиопомех является разной. Эффективность воздействия радиопомех на данную РЛС тем выше, чем меньше величина . По величине можно оценить также помехоустойчивость подавляемого РЭС. Она тем выше, чем больше .
С помощью можно оценить также эффективность тех или иных мер повышения помехоустойчивости РЭС. Эффективность этих мер можно оценить отношением B=kП'/ kП.
Здесь – коэффициент подавления РЭС с принятыми мерами (устройствами) помехоустойчивости; – величина без использования таких мер.
3.4. Информационный критерий эффективности РЭП
Информационные критерии применяются для оценки качества помеховых сигналов и соответственно величины информационного ущерба, наносимого противнику.
РЭП РЭС системы управления ПВО в конечном счете преследует цель лишить противника полностью или частично информации. Для оценки РЭП в этом случае используют информационные критерии [4]. Одним из них является критерий информационного ущерба.
Применительно к подавлению РЛС ОНЦ этот критерий определяется как отношение объема пространства, прикрытого от наблюдения помехами, к общему объему пространства, в котором РЛС ведет наблюдение целей.
Качество маскирующих и имитирующих радиопомех с использованием информационного критерия оценивается их энтропией. Эти помехи должны исключить возможность обнаружения полезного сигнала с вероятностью, превышающей заданное значение, при некоторых ограничивающих условиях.
Непременным условием правильного функционирования систем информационного обеспечения является априорное знание полезного сигнала. Степень этого знания может быть различной, но некоторые из них, о законах распределения частных видов сигналов, принадлежащих данному классу, должны быть известны всегда. В противном случае обеспечить работоспособность информационной системы невозможно.
Идеальные (маскирующие и имитирующие) помеховые сигналы должны создать такие условия, при которых апостериори, после приема полезного сигнала, априорная неопределенность в системе информационного обеспечения сохранилась бы. Для обеспечения этих условий помеховые сигналы должны содержать элемент неопределенности.
Введение энтропии, как характеристики качества помеховых сигналов, позволяет оценивать потенциальные возможности помех безотносительно к конкретным способам их обработки в подавляемых устройствах [20].
Пусть сигналы xi (i=1,2,…M) могут независимо передаваться без помех с априорными вероятностями Pi

Мера количества информации вводится исходя из следующих требований:
- она должна обладать свойствами аддитивности (количество информации в независимых сообщениях должно суммироваться);
- она определяется лишь степенью неопределенности события (если достоверен только один ого исход – она нулевая).
Этим условиям удовлетворяет логарифмическая мера информации
Если события равновероятны, то ,
Усредняя Ii по возможным i, вводят среднее количество передаваемой информации Iср, приходящееся на сообщение, то есть меру неопределенности ансамбля сообщений x (энтропию) [27]:
или
Если достоверно передается только одно сообщение, то таким образом .
Если то
То есть, чем больше М, тем больше неопределенность i-го события.
С учетом особенностей цифровой техники предпочитают брать log
За единицу информации принимают бит – количество информации, содержащееся в сообщении об одном из двух равновероятных исходно событий
.
Для непрерывно распределенных с плотностью вероятности w(x) случайных величин энтропия определяется как
или
Таким образом, качество маскирующих и имитирующих радиопомех можно оценить с помощью энтропии.
Многомерная энтропия непрерывной маскирующей помехи определяется выражением
,
где – многомерная плотность вероятности мгновенных значений помехового сигнала.
Если помеховый сигнал представляет собой стационарный случайный процесс длительностью и шириной спектра , то его многомерная энтропия [20]
,
где – одномерная энтропия.
Наилучшими маскирующими свойствами среди помех при заданной мощности обладает «белый» шум (стационарный гауссов шум с равномерной спектральной плотностью). Одномерная энтропия такого шума равна
,
где – мощность «белого» шума.
Многомерная энтропия помехового сигнала с равномерной спектральной плотностью, ограниченной полосой fП, на интервале наблюдения
.
Качество других видов маскирующих помех по сравнению с «белым» шумом определяется отношением
; иногда ,
где – мощность помехи, энтропия которой равна энтропии «белого» шума .
При рассмотрении имитирующих помех в качестве информационного критерия используется разность условных энтропии случайных параметров полезного сигнала и помехи. Наилучший эффект имитации будет в случаях, если эта разность равна нулю.
Условная энтропия учитывает возможную связь элементов событий, например одного и того же сигнала.
Пусть передано сообщение xi (i=1,2,…M), а условная вероятность передачи сообщения yj (j=1,2,…M) равна P(yj / xi ) , тогда условная энтропия равна
Усредняем по всем xi
.
Энтропия совмещения событий передач двух взаимосвязанных в общем случае сообщений определяется выражением
.
4. Уравнение радиоэлектронного подавления для активной радиолокации
4.1. Общее уравнения РЭП
Уравнением РЭП называется соотношение, связывающее между собой параметры и координаты подавляемой РЛС, передатчика радиопомех и прикрываемой помехами цели [4]. Уравнение РЭП позволяет определить величину k как отношение мощности помехового сигнала к мощности полезного сигнала на входе приемника подавляемой РЛС в пределах полосы пропускания его линейной части:
. (1)
При сравнении k с величиной коэффициента подавления kП можно определить размеры зон подавления (k kП) или неподавления (k kП) РЛС, границы этих зон (k = kП), а также решить ряд других задач. Под зоной подавления понимается область пространства, в пределах которой РЛС подавлена с заданной эффективностью. Применительно к РЛС обнаружения это означает, что обеспечивается снижение вероятности правильного обнаружения Wпо до заданного уровня (при Wлт = const).
При выводе уравнения РЭП рассматривают общий случай, когда постановщик помех и прикрываемая цель разнесены в пространстве. Подавляемая РЛС и передатчик помех находятся в точках О и П (рис. 29). Прикрываемая цель Ц и передатчик радиопомех П находятся от РЛС на расстояниях DЦ и DП и имеют угловые координаты соответственно для цели и для помехи .
Рис. 29. Создание радиопомех из зон
Влияние отражений от земной поверхности и поглощение энергии ЭМВ в атмосфере не учитываются.
Тактико-технические данные о подавляемой РЛС, передатчике радиопомех и прикрываемой цели считаются известными. При этом РЛС характеризуется следующими параметрами: мощностью передатчика Рр, коэффициентом усиления антенны , где GР – его максимальное значение, а – нормированная функция диаграммы направленности антенны РЛС по мощности с полосой пропускания приемника Dfпрм.
Помеховый сигнал, излучаемый антенной передатчика радиопомех, имеет мощность РП, ширину спектра DfП и коэффициент поляризации gП. Последний учитывает степень совпадения поляризации ЭМВ помехового и полезного сигналов. Коэффициент усиления антенны передатчика помех . В этом выражении GП – максимальное значение коэффициента усиления антенны радиоприемного устройства станции помех, а – нормированная функция диаграммы направленности антенны по мощности. Прикрываемая помехами цель имеет эффективную поверхность рассеяния sЦ.
Мощность полезного сигнала на входе приемника подавляемой РЛС определяется выражением:
,
где - плотность потока мощности полезного сигнала у антенны РЛС (уравнение радиолокации II-го рода);
-
эффективная площадь приемной антенны РЛС в направлении на цель (Aр –максимальное значение площади антенны, – значение нормированной функции диаграммы направленности антенны РЛС в направлении на цель). Таким образом:
.
Аналогично можно определить мощность помехового сигнала на входе приемника РЛС в пределах его полосы пропускания:
,
где плотность потока мощности помехового сигнала у антенны подавляемой РЛС:
;
где – эффективная площадь приемной антенны РЛС в направлении на постановщик помех, причем . В этом выражении – значение нормированной функции диаграммы направленности антенны РЛС в направлении на постановщик помех.
С учетом приведенных выражений мощность помехового сигнала
.
Уравнение РЭП, таким образом, имеет вид:
.
Это уравнение определяет отношение мощности помехового сигнала к мощности полезного сигнала на входе приемника подавляемой РЛС в зависимости от параметров РЛС, передатчика радиопомех, цели и их взаимного расположения.
Сравнение величины k, полученной в результате решения этого уравнения, с величиной коэффициента подавления kП для данной конкретной ситуации применения средств РЭП и подавляемой РЛС позволяет оценить эффективность РЭП. Коэффициент подавления определяется аналитическим либо графическим путем.
Условие радиоэлектронного подавления для активной РЛС будет иметь вид [4]
.
Это неравенство может быть использовано для решения следующих задач:
- определения зоны подавления и ее границы;
- расчета величины эффективного сектора (), прикрытого помехами, при заданных параметрах передатчика помех и заданной минимальной дальности до него DП min ;
- оценки энергетического потенциала передатчика помех, необходимого для подавления РЛС в пределах заданного сектора .
Решение этих задач позволяет проводить практические расчеты на применение средств РЭП.
4.2 Определение зоны подавления РЛС и ее границ из уравнения РЭП
При произвольном расположении в пространстве передатчика помех и прикрываемой цели зона подавления РЛС определяется из неравенства k kП и описывается выражением [4]
.
Это выражение дает пространственное описание зоны подавления. Из этого выражения следует, что зона подавления и ее границы в значительной степени определяются диаграммой направленности подавляемой РЛС.
Упростим задачу определения зоны подавления и ее границ. Предположим, что передатчик помех имеет слабонаправленную антенну . Учтем также то, что для некоторых типов антенн (в частности, зеркальных) в небольшом диапазоне углов , а значение нормированной функции диаграммы направленности в горизонтальной плоскости в направлении на цель равно единице.
При этих предположениях выражение будет иметь вид
.
Рассмотрим зону подавления в одной плоскости, например, в азимутальной (горизонтальной). Для этого будем полагать, что значение нормированной функции диаграммы направленности антенны РЛС в угломестной плоскости в направлении на передатчик помех и на цель близко к единице. Обычно для расчетов эти значения выбирают в пределах 0,8…1,0.
Кроме того, будем оценивать угловое положение передатчика помех не абсолютным значением в полярной системе координат, а углом , характеризующим разницу в угловом положении цели и передатчика помех, то есть .
С учетом сделанных замечаний выражение для зоны подавления РЛС в азимутальной плоскости примет вид
.
Отсюда граница зоны подавления для произвольного расположения прикрываемой цели и передатчика радиопомех по азимуту и дальности будет определяться выражением
.
Следует заметить, что зона подавления может быть получена для любого фиксированного значения дальности до передатчика помех DП и для любого изменения угла . Наиболее простой для рассмотрения случай, когда передатчик радиопомех и прикрываемая цель находятся на одинаковой дальности DП=DЦ от подавляемой РЛС, но их угловое положение в плоскости азимута различается на (рис. 30).
Рис. 30. Зона подавления РЛС постановщика помех
Зона подавления для этого случая описывается более простым выражением
и соответственно граница зоны подавления будет определяться формулой
.
При изменении углового положения цели относительно передатчика помех на фиксированной дальности DП=DЦ минимальная дальность подавления изменяется и может быть построена зона подавления для этого случая (см. рис. 30).
Из рис.30 и последней формулы видно, что минимальная дальность подавления имеет наименьшее значение при =0, поскольку Fp(0)=1 (случай самоприкрытия). Объясняется это тем, что мощность полезного сигнала изменяется обратно пропорционально изменению , а мощность помехового сигнала – обратно пропорционально DП. Отношение изменяется пропорционально при . На дальности DЦ = DЦ min величина k = kП, поэтому при DП DП min величина k kП и условия подавления РЛС выполняются. Если же DП < DП min, то k < kП и РЛС не подавлена.
При 0 значение нормированной функции диаграммы направленности антенны становится меньше единицы, и минимальная дальность подавления DЦ min увеличивается, а эффективность РЭП снижается с увеличением . Если цель находится в точке 1 азимутальной плоскости, то k > kП, если в точке 2, то k = kП. В обоих случаях РЛС подавлена. Если же цель выходит за пределы зоны подавления (например, в точку 3), то условия подавления РЛС уже не выполняются, поскольку k < kП.
Эффективность РЭП снижается не только при увеличении , но и при увеличении энергетического потенциала РЛС, при увеличении эффективной площади рассеяния цели и увеличении дальности до передатчика помех. Во всех этих случаях при прочих равных условиях возрастает дальность подавления DЦ min.
Увеличение мощности передатчика помех , а если это невозможно (например, для бортовых условий), то увеличение энергетического потенциала (за счет применения направленных антенн) приводит к уменьшению DЦ min и соответственно к повышению эффективности РЭП.
5 Активные радиопомехи радиолокационным системам обнаружения целей
5.1. Краткая характеристика радиолокационных систем обнаружения воздушных целей
РЛС обнаружения, наведения и целеуказания (ОНЦ) [4] осуществляет обнаружение воздушных целей, определение их координат и параметров движения. Полученная информация используется при решении задач целераспределения, выработке команд целеуказания ЗРК и ЗСК и наведения ИП на воздушные цели. Указанные РЛС работают в режиме кругового или секторного обзора воздушного пространства. При работе РЛС диаграмма направленности антенны (ДНА) периодически перемещается в пределах заданной зоны обзора пространства. Данные о целях поступают дискретно через интервал времени Tобз, определяемый скоростью вращения антенны. Обнаружение цели, определение ее координат осуществляются на проходе в момент нахождения ее в пределах ДНА в течение времени облучения Tобз.
Измеряемыми координатами целей, как правило, являются дальность от РЛС до цели Rц и угловые координаты – азимут ц и угол места ц. Могут измеряться также высота полета целей h и радиальная составляющая скорости их движения vp.
В зависимости от числа измеряемых координат РЛС ОНЦ делятся:
- на однокоординатные (радиолокационные дальномеры, высотомеры),
- двухкоординатные,
- трехкоординатные.
Совокупность двух или нескольких РЛС ОНЦ, информация от которых объединяется и подвергается совместной обработке, называется радиолокационным постом. Два или более радиолокационных поста, обменивающихся информацией, образуют радиолокационную систему (сеть) обнаружения воздушных целей.
В радиолокационных системах информация о целях извлекается из принимаемых от цели радиосигналов. Наибольшее применение получили активные РЛС. В этих РЛС радиосигналы образуются в результате облучения целей зондирующими сигналами и приема от них отраженных сигналов.
В зависимости от вида зондирующих (облучающих цели) сигналов РЛС ОНЦ делятся:
- на импульсные,
- непрерывные,
- квазинепрерывные.
В импульсных РЛС излучается периодическая последовательность немодулированных или модулированных радиоимпульсов длительностью и и периодом следования Ти. В первом случае РЛС называются РЛС с простыми импульсными сигналами. Импульсные РЛС, в которых используются радиоимпульсы с внутренней (частотной или фазовой) модуляцией, называются РЛС со сложными сигналами.
Отношение , называемое скважностью импульсной последовательности, у импульсных РЛС равно сотням и тысячам.
К достоинствам импульсных РЛС с большой скважностью относятся:
- простота одновременного измерения дальности до нескольких целей и их высокое разрешение по дальности,
- временная развязка излучаемых и принимаемых сигналов, что позволяет использовать в РЛС для передачи и приема одну антенну.
В РЛС с непрерывным излучением (рис.9.1, [3]) излучаются незатухающие колебания. Эти колебания могут быть гармоническими, модулированными (например, частотно-модулированными), шумоподобными и др. Их достоинствами являются:
- возможность обнаруживать цели путем селекции отраженных сигналов по частоте Доплера;
- однозначно измерять дальность и радиальную скорость полета относительно РЛС при сравнительно малой мощности излучения.
Рис. 31. Упрощённая структурная схема непрерывной РЛС ( fд – частота Доплера)
РЛС с квазинепрерывным излучением (когерентные импульсные РЛС с малой скважностью Q=5…30) обладают хорошей разрешающей способностью по дальности и скорости.
Излучаемые сигналы импульсных РЛС могут быть когерентными или некогерентными. У некогерентной последовательности начальные фазы от импульса к импульсу изменяются по случайному закону. Начальная фаза радиоимпульсов когерентной последовательности изменяется по детерминированному закону или является постоянной величиной.
По виду обработки отраженных от цели сигналов РЛС также делятся на некогерентные и когерентные. В некогерентных импульсных РЛС при обработке отраженного сигнала фаза высокочастотных импульсов не используется. Для получения информации о координатах цели используется огибающая отраженных радиоимпульсов. При когерентной обработке принятых импульсных радиосигналов используется дополнительная информация, заключенная в их фазе. Когерентная обработка позволяет улучшить характеристики обнаружения РЛС, обнаружить движущиеся цели на фоне пассивных радиопомех.
РЛС с непрерывным и квазинепрерывным излучением, а также импульсные РЛС со сложными сигналами являются когерентными. Импульсные РЛС с большой скважностью могут быть некогерентными и когерентными.
В радиолокационных системах обнаружения местоположение цели в пространстве определяется как точка пересечения линий или поверхностей положения, соответствующих измеренным значениям координат. При этом могут использоваться дальномерный, угломерный, угломерно-дальномерный, разностно-дальномерный, суммарно-дальномерный, угломерно-разностно-дальномерный методы определения местоположения лоцируемого объекта.
В радиолокационных системах информация о координатах и параметрах движения целей [4] извлекается из принятых сигналов в результате первичной, вторичной, третичной обработки.
- Первичная обработка сигналов осуществляется за один период обзора Tобз (время облучения цели Tобл) РЛС. При этом предполагается, что за время наблюдения Tн= Tобз координаты цели не меняются.
- При вторичной обработке получение информации осуществляется за несколько периодов обзора РЛС. При этом представляется возможность определить траекторию полета цели.
- Третичная обработка выполняется совместной обработкой данных, получаемых несколькими совмещенными или разнесенными РЛС. В этом случае удается определить местоположение источников помех.
Наиболее широкое применение нашли некогерентные и когерентные импульсные РЛС с большой скважностью. Используются также РЛС с квазинепрерывным излучением и сложными импульсными и шумоподобными сигналами.
Основной задачей РЭП радиолокационных систем обнаружения целей являются скрытие (маскировка) самолетов, их количества, создание на экранах индикаторов РЛС ложных отметок целей. Воздействие радиопомех приводит к уменьшению количества получаемой противником информации об истинных целях, затруднению решения задач целераспределения, выработки команд наведения на воздушные цели, команд целеуказания .
Эффективность воздействия радиопомех зависит от структуры построения и принципа функционирования подавляемой РЛС, вида используемых помеховых сигналов, способа их создания, применяемых средств помехозащиты и др.
Для маскировки целей (могут применяться активные непрерывные шумовые радиопомехи, хаотические импульсные помехи (ХИП). При воздействии непрерывных шумовых помех и ХИП на экране ИКО РЛС появляются засвеченные секторы.
В качестве имитирующих активных помех для подавления РЛС используются импульсные однократные или многократные ответные помехи (МОП), представляющие собой один или несколько радиоимпульсов, излучаемых станцией помех, в ответ на каждый радиоимпульс РЛС, принятый ею.
5. Радиоэлектронное подавление активными радиопомехами некогерентных импульсных РЛС
В некогерентных импульсных РЛС ОНЦ при измерении дальности до цели используется импульсный метод, а при измерении угловых координат – амплитудный метод максимума. Принцип действия такой РЛС поясняется структурной схемой [4], изображенной на рис. 3
Рис. 32 Структурная схема некогерентной импульсной РЛС ОНЦ
В качестве зондирующих сигналов используется некогерентная последовательность радиоимпульсов, вырабатываемая генератором радиочастоты (ГРЧ). Длительность радиоимпульсов задается модулятором, а моменты излучения (период следования Tп) – синхронизатором. В режиме «Передача» последовательность зондирующих радиоимпульсов через антенный переключатель (АП) поступает в антенну и излучается в окружающее пространство.
Обзор пространства, например, в двухкоординатной РЛС осуществляется поворотом антенны, имеющей сравнительно узкую диаграмму направленности в азимутальной (горизонтальной) плоскости и широкую в угломестной (вертикальной) плоскости.
При круговом обзоре РЛС осуществляет однократный обзор пространства за время Tобз=1/nА, где пА – число оборотов антенны. При этом цель облучается в течение времени Tобл, которое определяется выражением
,
где – ширина ДНА в азимутальной плоскости (в градусах) по уровню половинной мощности.
За один оборот антенны на вход приемника поступает пачка из отраженных радиоимпульсов. Количество импульсов в пачке Nи равно
,
где Fп – частота следования импульсов.
Угловые перемещения антенны (максимума ДНА) в азимутальной плоскости передаются на индикатор РЛС. В результате формируется радиально-круговая развертка. Положение радиальной развертки на экране ИКО однозначно определяет направление максимума ДНА РЛС.
Отраженные от цели сигналы улавливаются антенной, проходят через тракт обработки и подаются на ИКО РЛС, на котором формируется отметка цели в виде дужки. Местоположение цели в азимутальной плоскости определяется удалением DЦ отметки от центра ИКО и углом Ц..
Полоса пропускания УПЧ согласуется с длительностью радиоимпульса и и равна f=1/ и. Однако из-за нестабильности несущей частоты колебаний передатчика, гетеродина приемника, эффекта Доплера полоса пропускания УПЧ выбирается в 1,5…2 раза шире.
Амплитудный детектор выделяет огибающие принятых радиоимпульсов. Полученная на выходе детектора за один период обзора пачка видеоимпульсов накапливается в накопителе (видеоинтеграторе, ВИ) и поступает на ИКО. При небольшом количестве импульсов в пачке их накопление может осуществляться люминофором электронно-лучевой трубки с яркостной отметкой ИКО.
Воздействие активных радиопомех на РЛС ОНЦ может приводить к подавлению сигналов целей в приемном тракте, маскировке полезных сигналов помеховыми, а также к имитации полезных сигналов.
Подавление полезных сигналов происходит в тех случаях, когда помеховый сигнал на входе приемника подавляемой РЛС во много раз превышает по амплитуде (мощности) полезный сигнал и вызывает перегрузку усилительных каскадов, имеющих ограниченный динамический диапазон. По мере увеличения интенсивного помехового сигнала результирующая амплитуда выходного сигнала изменяется. При большой интенсивности радиопомехи полезный сигнал будет ограничен и произойдет его полное подавление.
Перегрузка усилительных каскадов приемников РЛС возможна при создании импульсных и непрерывных шумовых радиопомех.
Пусть на РЛС действуют шумовые импульсные маскирующие радиопомехи при отсутствии перегрузок. Тогда uС(t) и uП(t) – аддитивная смесь полезного и помехового сигналов; uП(t) – непрерывная шумовая помеха, установленная на цели или на постановщике помех), она подчиняется гауссовому закону распределения, а ее спектральная плотность N0 постоянна.
Эффекты взаимодействия полезного и помехового сигналов поясняются графиками на рис. 33.
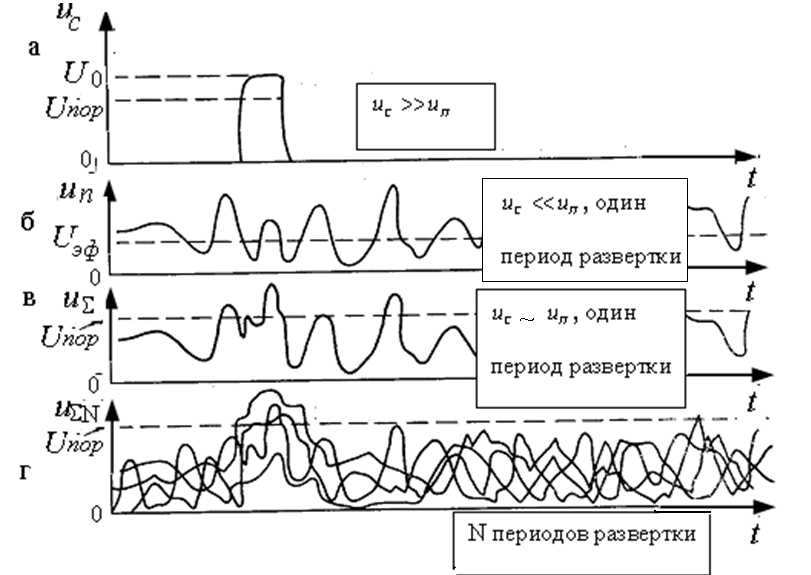
Рис. 33. Графики, поясняющие взаимодействие сигнала и шумовой помехи
Шумовая помеха за несколько периодов развертки образует на экране индикатора так называемую шумовую дорожку. Под действием помех сигнал оказывается размытым и создает на экране индикатора шумоподобные всплески.
Воздействие непрерывных шумовых радиопомех может приводить к подавлению полезных сигналов, принимаемых РЛС (импульсы помехи «гасят» полезные сигналы), а при их отсутствии (импульсы помехи превышают заданный порог Uпор) – к созданию ложных отметок (ложная тревога). В результате обнаружение цели осуществляется с ошибками.
Эффективность функционирования РЛС оценивается с помощью характеристик обнаружения (зависимости вероятности правильного обнаружения WПО от вероятности ложной тревоги WЛТ при заданном отношении удвоенной энергии полезного сигнала к спектральной плотности помехи q = 2Ec/N0). Вид характеристик обнаружения показан на рис. 34. Каждому значению WПО соответствует вполне определенное значение WЛТ при q = const.
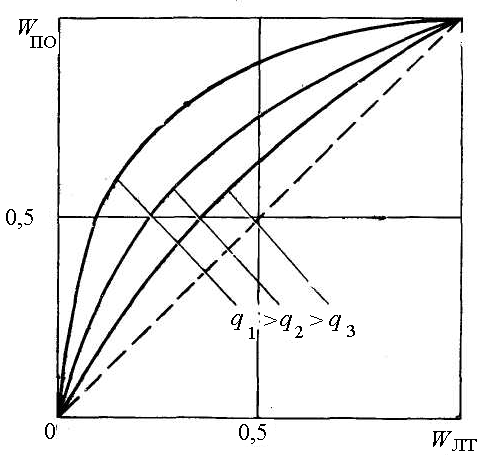
Рис. 34. Характеристики обнаружения РЛС
Накопление энергии некогерентной пачки импульсов можно осуществить с помощью видиоинтегратора, состоящего из усилителя, охваченного положительной обратной связью с задержкой на период следования Ти (рис. 35).
Рис. 35. Структурная схема накопителя импульсов пачки
Среднее значение медленно флюктуирующих импульсов на входе ВИ равно . В момент окончания пачки мощность накопленных импульсов равна
,
где - сопротивление нагрузки, - мощность одного импульса на входе ВИ.
Помеховые выбросы, возникающие на выходе АД, в связи с некоррелированностью мгновенных значений суммируются по мощности.
Суммарная мощность помеховых импульсов к концу времени накопления равна
,
где - мощность на входе ВИ.
В результате отношение мощности полезного сигнала и мощности помехового сигнала на выходе ВИ равно
,
в раз меньше, чем на входе.
5.3. Радиоэлектронное подавление активными радиопомехами РЛС с внутриимпульсной модуляцией
5.3.1. РЛС с ЛЧМ-сигналом [4]. Недостаток импульсных РЛС с простыми сигналами – при фиксированном значении импульсной мощности передатчика увеличить дальность действия возможно только за счет увеличения длительности зондирующих радиосигналов. Но при этом ухудшается разрешающая способность РЛС по дальности (). Так, увеличение длительности радиоимпульсов с 1 до 100 мкс приводит к ухудшению разрешающей способности со 150 м до 15 км.
Выход – в использовании РЛС со сложными сигналами. Нашли применение импульсные РЛС с ЛЧМ и фазоманипулированными (фазокодоманипулированными – ФКМ) сигналами.
Общим для указанных РЛС является то, что принимаемые отраженные сигналы от целей подвергаются свертке (сжатию) и последующей когерентной обработке. Так как структуры сигналов различны, то и «процедуры» сжатия и обработки сигналов в этих РЛС имеют особенности. В связи с этим имеет особенности и радиоэлектронное подавление РЛС с ЛЧМ и РЛС с ФКМ - сигналами.
В РЛС с ЛЧМ-сигналами (рис. 36) излучается периодическая последовательность радиоимпульсов достаточно большой длительности с изменяющейся несущей частотой внутриимпульсных колебаний по закону при (рис. 37,а), где - постоянная величина. Ширина спектра импульсного частотно-модулированного сигнала , (В - произведение ширины спектра сигнала на его длительность, называемое базой или коэффициентом сжатия, В>>1). При , , , , В=2·10-7·108=20.
Рис. 36. ЛЧМ-сигнал
а б
Рис. 37. Графики, поясняющие принцип действия РЛС с ЛЧМ-сигналами: а – закон изменения частоты радиоимпульсов; б – дисперсионная характеристика линии задержки устройства обработки сигналов
Обработка сигналов, отраженных от целей, осуществляется корреляционным приемником или согласованным фильтром. В качестве согласованного фильтра используется дисперсионная линия задержки, время запаздывания сигнала в которой зависит от частоты радиоимпульса (рис. 37, б). Более низкие мгновенные частоты радиоимпульса задерживаются на большее время по сравнению с высокими частотами. Вследствие этого на выходе дисперсионной линии задержки получается укороченный (сжатый) радиоимпульс, длительность которого - в B раз меньше длительности излучаемого радиосигнала.
Если дисперсионная линия задержки не имеет потерь, то справедливо равенство . В этом случае .
Для радиоэлектронного подавления РЛС с ЛЧМ могут применяться активные маскирующие или имитирующие радиопомехи.
В качестве маскирующих используются непрерывные шумовые радиопомехи. Для этого вида помехового сигнала характерно то, что изменения его мгновенной частоты происходят по случайному закону. Вследствие этого мощность помехового сигнала при прохождении через дисперсионную линию задержки не изменяется. А так как мощность полезного сигнала увеличивается в В раз, то коэффициент подавления РЛС с ЛЧМ - сигналами при использовании непрерывных шумовых помех в В раз больше, чем при подавлении импульсных РЛС с простыми сигналами (при равенстве импульсных мощностей передатчиков РЛС).
Имитирующие радиопомехи могут создаваться путем ретрансляции (переизлучения) сигналов РЛС с задержкой по времени, либо путем смещения частоты несущей, либо путем дополнительной модуляции сигналов по амплитуде или частоте. Рассмотрим прохождение таких радиопомех через приемник РЛС.
Радиопомеха, создаваемая путем переизлучения сигналов РЛС с задержкой по времени, проходит через дисперсионную линию задержки точно так же, как и полезный сигнал. Если передатчик помех расположен на прикрываемом самолете (цели), то вначале на выходе дисперсионной линии задержки появится сжатый по времени отраженный сигнал, а затем помеховый сигнал. Временная задержка помехового сигнала определяется временем задержки полезного сигнала в ретрансляторе.
Изменение несущей частоты помехового сигнала в ретрансляторе на величину Fр в диапазоне возможных доплеровских частот приводит к тому, что помеховый сигнал эквивалентен отраженному с доплеровской частотой Fд= Fр.
При увеличении или уменьшении частоты несущей в ретрансляторе помеховый сигнал на выходе дисперсионной линии задержки может оказаться слева или справа от полезного сигнала на временной оси. Это обстоятельство позволяет создавать опережающую ответную помеху по дальности.
Модуляция амплитуды ретранслированного сигнала шумом приводит к образованию большого числа ложных отметок. Воздействие такой помехи эквивалентно воздействию «белого» шума.
При синхронизации модулирующего напряжения ретранслятора сигналом РЛС такая помеха является более эффективной, чем «белый» шум, так как оказывается коррелированной с сигналом.
3.5. В РЛС с ФКМ-сигналами [4] излучается последовательность радиоимпульсов (рис. 38,в) длительностью , каждый из которых состоит из В подимпульсов длительностью . Начальная фаза этих импульсов изменяется по вполне определенному закону (коду) и принимает одно из двух значений - 0 или .
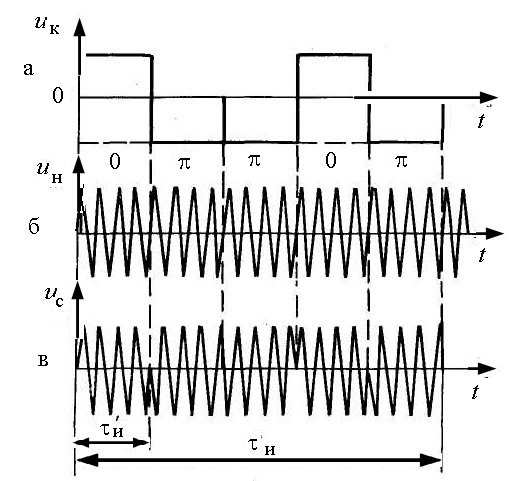
Рис. 38. К пояснению принципа действия РЛС с ФКМ-сигналами: мгновенные значения модулирующего сигнала (а), несущего колебания (б), ФКМ-радиосигнала (в)
Закон изменения фазы несущего колебания показан на рис. 38,а. В приемнике с помощью дешифратора принятые отраженные импульсные сигналы сжимаются по времени (длительности) в В раз.
Возможная структурная схема дешифратора изображена на рис. 39. Дешифратор представляет собой линию задержки с отводами, отстоящими друг от друга на длительность . На каждом выходе линии задержки помещается фазовращатель, который может изменить фазу на . Выходные сигналы фазовращателей суммируются. Полученный результат фильтруется в полосе . Код фазовращателей устанавливается обратным коду излучаемого сигнала. В момент времени, когда сложный импульс заполнит линию задержки, его элементарные сигналы (подимпульсы) на входе сумматора оказываются в фазе. Следовательно, амплитуда сигнала на выходе сумматора , где - амплитуда импульса на входе линии задержки. Мощность выброса шумовых помех на интервале времени некоррелирована. Поэтому
.
Рис. 39. Устройство сжатия сигналов РЛС с ФКМ-сигналами
Следовательно, в рассматриваемой РЛС по отношению к РЛС с простым сигналом обеспечивается выигрыш в отношении сигнал/помеха по мощности в В раз, что потребует для ее подавления увеличения мощности передатчика радиопомех также в В раз. Коэффициент сжатия В в современных РЛС составляет сотни…тысячи. Коэффициент подавления рассмотренной РЛС при действии шумовых радиопомех, так же как в РЛС с ЛЧМ-сигналами, в В раз выше, чем в импульсных РЛС с простыми сигналами.
Для подавления РЛС с ФКМ-сигналами кроме активных шумовых радиопомех также могут использоваться имитирующие радиопомехи, которые получают путем ретрансляции сигналов подавляемой РЛС.
По аналогии с РЛС, использующей ЛЧМ-сигналы, в РЛС с ФКМ-сигналами можно ожидать эффективное действие радиопомех, создаваемых путем изменения фазы ретранслированного сигнала. Радиопомеха, создаваемая путем задержки ФКМ-сигнала по времени, будет проходить через дешифратор и создавать на выходе помеховый импульс, задержанный от отраженного сигнала на время задержки в ретрансляторе. Изменение частоты несущей на величину FP, значительно большую максимальной доплеровской частоты целей, приводит к созданию помех каналу измерения дальности. Смещенные по частоте помеховые сигналы создают помеховые импульсы, возникающие раньше и позже полезного сигнала.
Передатчик ложных целей для РЛС с ЛЧМ. Цель имитационных помех – создать ложную информацию путем внутриимпульсной амплитудной и частотной модуляции ретранслируемого сигнала, приводящего к созданию ложных целей по дальности. Подверженность РЛС с ЛЧМ воздействию ретрансляционной помехи связана с тем, что отраженный сигнал от цели должен приниматься до того момента, как сформировался сжатый импульс. Добавление в ретранслируемый сигнал, например, частотного сдвига вызывает появление ложного импульса до или после отраженного (сжатого) от цели. Достижимый при этом диапазон ошибок по дальности ограничивается пространственной протяженностью рабочего импульса РЛС (до сжатия).
Радиолокационный сигнал РЛС с ЛЧМ принимается приемной антенной передатчика, усиливается в СВЧ-усилителе, модулируется в нем по фазе с целью обеспечения сдвига по частоте на определенную величину, проходит амплитудный модулятор, где превращается из широкого импульса в серию узких импульсов, усиливается в усилителе мощности и излучается через передающую антенну.
Синхронизация фазовой и амплитудной модуляции обеспечивается с помощью управляющих импульсов, формируемых специальным генератором, работа которого синхронизуется продетектированными импульсами РЛС. Управляющие импульсы представляют собой сигналы пилообразной формы, подаваемые на фазовый модулятор, и сигналы прямоугольной формы – для амплитудной модуляции.
За счет изменения частоты амплитудной модуляции, полярности и преобразования частоты с помощью фазовой модуляции можно сформировать ложную цель, расположенную на большей или меньшей дальности относительно дальности до постановщика помех. Если отношение помеха-сигнал при этом достаточно велико, то истинная цель может подавляться в приемнике РЛС, и оператор РЛС будет наблюдать только ложную цель.
Поскольку обработка сигналов в приемниках РЛС может быть различной, выбор параметров помеховой модуляции при формировании ложных целей должен осуществляться на основании экспериментальных исследований на аналогах РЛС противника или посредством моделирования. В ряде случаев представляется целесообразным излучать ложные сигналы описанной структуры одновременно с непрерывным шумом в пределах всей рабочей полосы частот. Если мощность шума достаточна, чтобы замаскировать действительный отраженный сигнал от цели, то в этом случае исключается возможность повторного захвата цели после срыва захвата, вызванного действием ложной частотной информации.
Известно, что создание одиночных ложных целей на расстоянии порядка 1,5 км от прикрываемой цели, как правило, не препятствует запуску ракеты. Поэтому целесообразно создавать не менее двух ложных целей на различных дальностях и осуществлять по программе уводы строба дальности на эти ложные цели. В этом случае РЛС будет лишена возможности сопровождать по дальности движущуюся в пространстве цель, возникнут большие ошибки слежения по дальности.
Один из методов защиты РЛС от имитационных помех рассмотренной структуры сводится к изменению закона модуляции частоты от импульса к импульсу. В этом случае передатчик ложных целей будет поочередно излучать помеховые импульсы, создающие то опережающие, то запаздывающие ложные цели. В результате на индикаторе РЛС будут наблюдаться импульсы, расположенные по обе стороны от полезного сигнала. При симметричном законе ЧМ - сигнала РЛС ложные цели будут равноотстоящими по временной оси от импульса цели. Это позволяет определять местоположение истинной цели как середины между положениями ложных целей и выставлять следящий строб дальности точно на место, где находится сигнал реальной цели.
Против описанной помехозащиты можно применить помеху с одинаковым изменением частоты от импульса к импульсу, тогда на экране индикатора РЛС будет создаваться только одна ложная цель (не парная) или с двойным изменением частоты в каждом импульсе с использованием, например, балансного модулятора. В этом случае возможно совмещение импульсной помехи с отраженным от цели импульсом, и при достаточной мощности помехи может происходить подавление полезного сигнала в схеме АРУ или ограничителе.
Имитирующие помехи РЛС с ЛЧМ сигналами могут создаваться путем ретрансляции сигналов РЛС с задержкой по времени. Такая помеха проходит фильтр сжатия точно так же, как и полезный сигнал. Если передатчик помех расположен на прикрываемом самолете, то вначале на выходе фильтра сжатия появится сжатый по длительности отраженный сигнал, а затем помеховый сигнал. Время задержки сжатого помехового сигнала относительно сжатого отраженного сигнала будет равно времени задержки помехового сигнала в ретрансляторе.
Имитационная помеха может быть создана также путем амплитудной модуляции гармоническим колебанием и шумом. При амплитудной модуляции по гармоническому закону с частотой fм и глубиной т помеха состоит из составляющей на несущей частоте и двух боковых частот, отстоящих от несущей на величину ±fМ с амплитудой т/ Составляющая на несущей частоте будет ослаблять или усиливать действие отраженного сигнала в зависимости от фазового сдвига, поэтому ее стараются, подавлять при формировании помехи, две другие составляющие будут оказывать мешающее действие, аналогичное смещению частоты на величину ±fМ. Если при модуляции используется одновременно несколько гармонических составляющих, например п, то на выходе фильтра сжатия будет создаваться 2n дополнительных сигналов. Но в этом случае отраженный сигнал будет иметь амплитуду, превышающую амплитуду помеховых составляющих, и помеховый эффект при большом п будет незначительным. Амплитудная модуляция шумом приводит к образованию большого числа ложных отметок, воздействие такой помехи будет эквивалентно действию маскирующей шумовой помехи.
Передатчик уводящих помех по дальности импульсной РЛС с ЛЧМ. Для создания уводящих помех по дальности обычным импульсным РЛС широкое распространение, как указывалось ранее, получил способ, основанный на применении устройства кратковременного запоминания частоты на основе рециркулятора радиоимпульсов. Однако применительно к подавлению РЛС с ЛЧМ этот способ не обеспечивает увод строба дальности РЛС с внутриимпульсной частотной модуляцией, потому что в рециркуляторе запоминается мгновенная частота передней части радиолокационного импульса выборки, которая не совпадает с частотой остальной части ЛЧМ - импульса. В результате этого в запомненном (рециркулированном) радиоимпульсе отсутствует главное изменение частоты. Другой недостаток этого способа при его использовании для создания уводящей помехи по дальности РЛС с ЛЧМ связан с несогласованностью длительности радиолокационного импульса (десятки микросекунд) с величиной задержки в рециркуляторе. В настоящее время в диапазоне СВЧ имеются линии задержки на 0,5 мкс с приемлемой величиной затухания для аппаратурной реализации.
5.4. Радиоэлектронное подавление активными радиопомехами
РЛС с квазинепрерывным излучением
РЛС с квазинепрерывным излучением (КНИ) [4] позволяет решать задачи обнаружения воздушных целей на малых высотах и их селекцию по скорости (частоте Доплера) сближения. Зондирующие сигналы в таких РЛС представляют собой когерентную последовательность радиоимпульсов с малой скважностью (Q=5…30). Частота следования импульсов равна (где – максимальная скорость сближения РЛС с целью).
В режиме обзора на входе приемника РЛС действует когерентная пачка радиоимпульсов, отраженных от цели. Количество Nи импульсов в пачке – несколько сотен. За счет увеличения импульсов в пачке по сравнению с РЛС с большой скважностью возрастает средняя мощность принимаемых сигналов. Следовательно, увеличиваются максимальная дальность обнаружения (примерно в 2…3 раза) и помехоустойчивость РЛС при действии радиопомех.
Упрощенная структурная схема РЛС с квазинепрерывным излучением (КНИ) приведена на рис. 40. Принцип действия передатчика РЛС поясняется графиками, изображенными на рис. 41.
Задающий генератор (ЗГ) генерирует высокостабильное гармоническое колебание (рис. 41,а) с частотой и фазой :
.
Это колебание поступает в усилитель мощности (УМ), в котором под действием импульсов модулятора (рис. 41,б) формируется последовательность когерентных радиоимпульсов длительностью и и периодом следования Тп (рис. 41,в). Модулятор запускается импульсами синхронизатора.
Рис. 40. Упрощенная структурная схема РЛС с квазинепрерывным излучением

Рис. 41. Графики, поясняющие принцип действия передатчика РЛС с квазинепрерывным излучением: мгновенные значения напряжений несущего колебания (а), модулирующего сигнала (б) и излучаемых радиоимпульсов (в)
Полученная на выходе УМ когерентная последовательность радиоимпульсов излучается антенной в окружающее пространство. Излучаемый сигнал имеет вид
,
Сигнал, отраженный от движущейся цели, описывается выражением
.
Здесь – огибающая амплитуд радиоимпульсов; –задержка отраженного сигнала, определяемая дальностью до цели и скоростью распространения ЭМВ; – постоянная фаза за счет отражения ЭМВ. Если , то ,
,
где – постоянное значение фазы, обусловленное начальным удалением цели; – доплеровская частота. Если РЛС неподвижна, то скорость сближения равна радиальной скорости движения цели .
Принятый сигнал поступает к смесителю (см. рис. 40) и с помощью опорного напряжения
преобразуется на промежуточную частоту . Полоса пропускания усилителя промежуточной частоты (УПЧ) согласуется с длительностью импульсов. На выходе УПЧ выделяется пачка радиоимпульсов
,
где и – коэффициенты передачи смесителя и УПЧ.
От УПЧ усиленные сигналы подводятся к т селекторам по дальности (СД1…СДm). Каждый из селекторов пропускает на выход сигналы целей, находящихся на интервалах дальностей . Селекторы открываются стробирующими импульсами, вырабатываемыми генератором стробирующих импульсов (ГСИ). Сдвиг этих импульсов относительно друг друга по оси времени равен и. Число селекторов дальности равно m=з max- и.
Применение селекторов по дальности позволяет повысить отношение сигнал/помеха при фильтровой обработке пачки отраженных импульсов, фиксировать дальности до целей.
С выхода каждого селектора дальности пачки когерентных радиоимпульсов поступают на набор п узкополосных фильтров; перекрывающих диапазон возможных значений доплеровских частот
.
Одна половина узкополосных фильтров предназначена для приема сигналов от удаляющихся целей, а другая – от приближающихся. Амплитудно-частотные характеристики узкополосных фильтров изображены на рис. 4 Попадание сигналов в первую половину фильтров, частоты настройки которых ниже центральной частоты , свидетельствует о том, что цель удаляется от РЛС (частота отраженного сигнала меньше излучаемого). При появлении сигнала на второй половине фильтров принимается решение о том, что цель приближается.
После каждого фильтра имеется амплитудный детектор (АД). Выходные сигналы АД через электронный коммутатор (ЭК) поступают на индикатор РЛС.
Выходные напряжения АД каждого набора фильтров суммируются. Полученный сигнал сравнивается с пороговым значением. При превышении порога принимается решение о наличии целей в этом интервале дальности и измерении их радиальных скоростей.
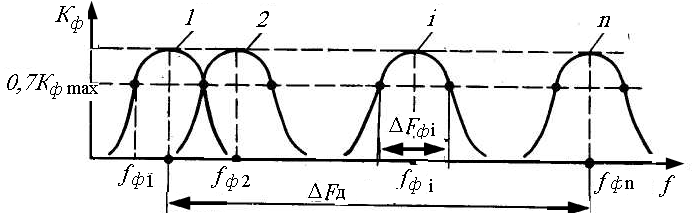
Рис. 42 Характеристика фильтров одного набора, необходимых для доплеровской селекции сигналов, отражённых от движущихся целей
Переход от одного набора фильтров к другому позволяет осуществлять последовательный просмотр целей на различных участках дальности (развертка по дальности).
Недостаток РЛС с КНИ – малый диапазон однозначного измерения дальности до целей.
При подавлении РЛС с КНИ активными шумовыми радиопомехами с шириной спектра используется незначительная часть мощности помехового сигнала. Если помеховый сигнал имеет равномерный спектр, то эта часть определяется величиной (смысл – на рис. 41).
Для подавления РЛС с КНИ целесообразно использовать узкополосные активные шумовые радиопомехи (доплеровские шумы) с шириной спектра
.
Кроме шумовых радиопомех эффективными являются имитирующие помехи по дальности и скорости. Такие помехи могут создаваться путем переизлучения сигналов подавляемой РЛС с задержкой по времени, дополнительной модуляцией сигналов по амплитуде, частоте или фазе, так же как при создании помех РЛС с ЛЧМ- и ФКМ-сигналами.
6. Активные помехи РЛС, работающим в режиме автосопровождения целей
6.1. Задачи, решаемые созданием помех РЛС АСЦ
РЛС АСЦ позволяют решать задачи прицеливания при стрельбе неуправляемыми снарядами, прицеливания и наведения управляемых ракет (УР) на цели.
Прицеливание при стрельбе по подвижным целям и наведение на них УР сводится к определению координат точки встречи (ТВ) снаряда (ракеты) с целью [4].
Для неуправляемого снаряда (ракеты) время полета tс (tp) до ТВ может быть рассчитано с использованием уравнений внешней баллистики. Расчет координат ТВ (определение момента выстрела снаряда, пуска ракеты и угла упреждения) требует непрерывного измерения координат и параметров движения цели.
Требования к точности определения координат ТВ зависят от вида применяемого оружия. Для УР эти требования относительно невысоки, поскольку после пуска в процессе наведения система управления устраняет влияние ошибки прицеливания на величину конечного промаха. Именно в этом и состоит основное назначение системы наведения (самонаведения) ракет.
При стрельбе неуправляемыми снарядами эти требования неизмеримо выше, так как траектория снаряда в процессе полета не корректируется.
Задача РЭП РЛС АСЦ состоит в том, чтобы увеличить ошибки измерения координат и параметров движения цели до величин, при которых ее поражение становится маловероятным. В некоторых случаях удается вообще исключить сопровождение цели по тем или иным координатам или сделать его прерывистым с неизбежным увеличением ошибок прицеливания (наведения). При организации РЭП РЛС АСЦ необходимо определить, какому из каналов сопровождения данной системы управления оружием целесообразно создать помехи. Решение этой задачи требует знаний уравнений прицеливания (наведения), используемых в системе управления.
В эти уравнения входят те или иные координаты и параметры движения цели, измеряемые РЛС АСЦ. Из уравнений прицеливания (наведения) однозначно определяются измерители координат, подавление которых нарушает работу системы управления. В связи с этим целесообразно кратко остановиться на принципах функционирования и уравнениях прицеливания (наведения) систем управления оружием ПВО и ВВС.
6.1.1. Прицеливание ЗСК по воздушной цели [4]. Траектория полета неуправляемого снаряда после выстрела не корректируется. Чтобы снаряд поразил цель (рис. 43), необходимо ствол орудия направить по отношению к цели в упрежденную точку (точку прицеливания ТП). Если прицеливание проведено правильно, поражение цели произойдет через время tc = tц, в точке ТВ.
Рис. 43. Геометрия прицеливания ЗСК в вертикальной плоскости
В вертикальной плоскости точка ТП находится выше точки ТВ на расстоянии , обусловленном действием ускорения силы тяжести g.
Уравнение прицеливания имеет вид
,
где – координаты цели, – поправка в прицеливании за счет действия силы тяжести, – угол упреждения.
В РЛС АСЦ ЗСК в качестве объекта подавления может рассматриваться любая из систем АСЦ. Поэтому выбирается та система, подавление которой достигается наиболее просто. Обычно такой системой является система автоматического сопровождения целей по дальности (АСД). Для подавления системы АСД широко применяются активные шумовые и уводящие по дальности помехи. Возможно создание помех системам АСН.
6.1. Системы самонаведения ракет ПВО [4]. Все современные самонаводящиеся ракеты ПВО (зенитные управляемые ракеты (ЗУР) и «воздух-воздух») используют для наведения на цель так называемый метод пропорционального наведения.
Для подавления систем самонаведения ракет могут и должны создаваться помехи системе углового сопровождения целей или, как ее часто называют, системе автоматического сопровождения целей по направлению (АСН), а также каналу измерения скорости сближения (Uсбл). В качестве последнего в системах с непрерывными и квазинепрерывными сигналами подсвета цели используется система сопровождения целей по скорости (АСС), а в РЛС с импульсными сигналами – система АСД.
6.1.3. Системы наведения ЗУР с командным управлением [4]. Большинство современных ЗРК с командным управлением для наведения ракет используют трехточечный метод параллельного сближения. Этот метод требует, чтобы в процессе наведения линия ракета-цель перемещалась в пространстве параллельно самой себе.
Для нарушения функционирования систем командного наведения ЗУР можно подавить системы АСН или АСД РЛС сопровождения цели или систему АСН РЛС сопровождения ракеты. РЛС сопровождения ракеты работает по сигналам, ретранслируемым ответчиком, установленным на ракете. Приемник этой РЛС, как правило, выполняется с малой чувствительностью, и подавить ее не представляется возможным из-за чрезвычайно высоких требований к мощности передатчика помех.
6.2 Некогерентные радиоэлектронные помехи из двух точек пространства
Некогерентными радиоэлектронными помехами системам АСН из двух и более точек пространства принято называть помехи, создаваемые независимо работающими и разнесенными в пространстве передатчиками. В приемнике РЛС такие помеховые сигналы не могут быть разделены (отселектированы) по тому или иному параметру. В качестве помеховых сигналов можно применять непрерывные шумовые помехи, нарушающие работу системы селекции целей по дальности или скорости сближения.
Пеленгатор как составная часть системы АСН вырабатывает сигналы, отображающие знак и величину отклонения равносигнального направления (РСН) от направления на цель. В том случае, когда в пределах диаграммы направленности антенны РЛС находятся два и более постановщика помех и их сигналы в приемнике не разделены, пеленгатор работает с ошибкой.
Рассмотрим функционирование моноимпульсного амплитудного пеленгатора с суммарно-разностной обработкой сигналов [4] в условиях воздействия помех из двух точек (рис. 44).
Второй канал системы полностью аналогичен первому и работает независимо. Поэтому рассматривать двухканальную систему АСН нет необходимости. Сначала покажем, что создание шумовых помех из одной точки пространства неэффективно, т. е. не нарушает работу моноимпульсной системы АСН.
Рис. 44. Упрощенная структурная схема моноимпульсной системы АСН с амплитудной суммарно-разностной обработкой
Пусть в пределах ДНА находится только один передатчик помех, излучающий сигнал
,
где – амплитуда и фаза, меняющиеся по случайному закону.
В АСН используется разностный метод создания равносигнального направления (РСН). При пеленгации цели в одной плоскости РСН соответствует пересечение двух диаграмм, максимумы которых разнесены на друг относительно друга на 20 =05, где 0.5 – ширина лепестка ДН по половинной мощности (рис. 45).
Суммарный и разностный сигналы определяются выражениями:
, ,
где ,
.
Для суммарного и разностного сигналов получим
,,
где – нечетная функция , – четная.
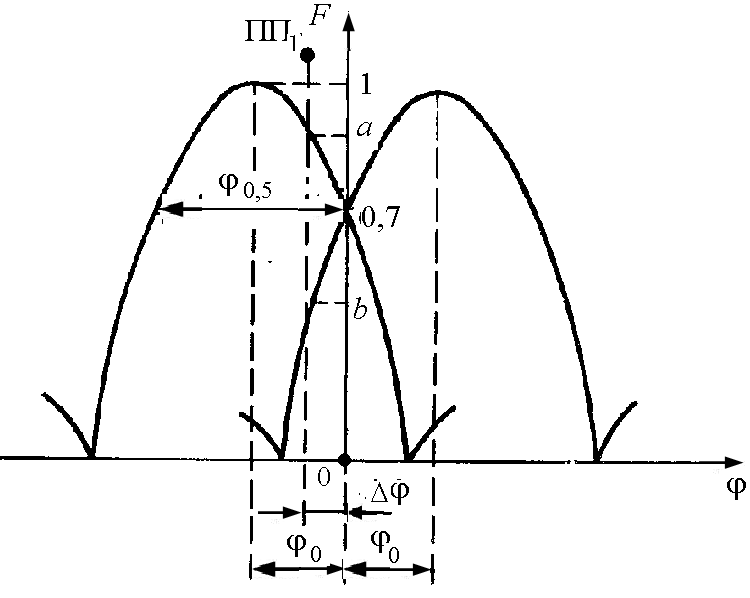
Рис. 45. Положение нормированных диаграмм направленности антенн моноимпульсных пеленгаторов
Если РСН совпадает с направлением на цель (=0), то =0. Если цель переместить вниз от РСН, то знак выражения в скобках меняется с плюса на минус, т.к. . Таким образом, является нечетной функцией , аналогично рассуждая, получим, что – четная функция.
При переходе цели через РСН происходит скачок фазы разностного сигнала на p. Отсюда следует вывод, раскрывающий принцип разностного метода пеленгования целей рассматриваемым устройством: разностный сигнал несет информацию об угловой координате цели относительно РСН. При этом величина отклонения отображается в нем амплитудой, а направление – фазой высокочастотного заполнения. Если цель находится выше РСН, то фазы u(t) и u(t) совпадают, если ниже РСН – они противоположны.
В смесителях См1 и См2 сигналы u(t) и u(t) умножаются на сигнал общего гетеродина. Следовательно, фазовые соотношения между ними не нарушаются. Спектры этих радиосигналов переносятся по шкале частот с несущей (0) на промежуточную частоту (пр).
Устройство автоматической регулировки усиления (АРУ) необходимо для исключения влияния изменений мощности принимаемых сигналов во времени на выходное напряжение пеленгатора uпу. Это напряжение должно зависеть только от угла рассогласования .
АРУ регулирует коэффициент усиления kУПЧ УПЧ в соответствии с законом, показанным на рис. 64. Если амплитуда напряжения на входе растет, то kУПЧ падает. Амплитуда сигнала на выходе УПЧ остается при этом примерно постоянной.
Рис. 46. Регулировочная характеристика устройства АРУ приемников
Можно показать, что коэффициенты усиления УПЧ, охваченных обратной связью, определяются выражением
где – коэффициент усиления УПЧ без АРУ (рис. 47,а); – коэффициент усиления устройства АРУ (рис. 47,б); – амплитуда сигнала на входе УПЧ.
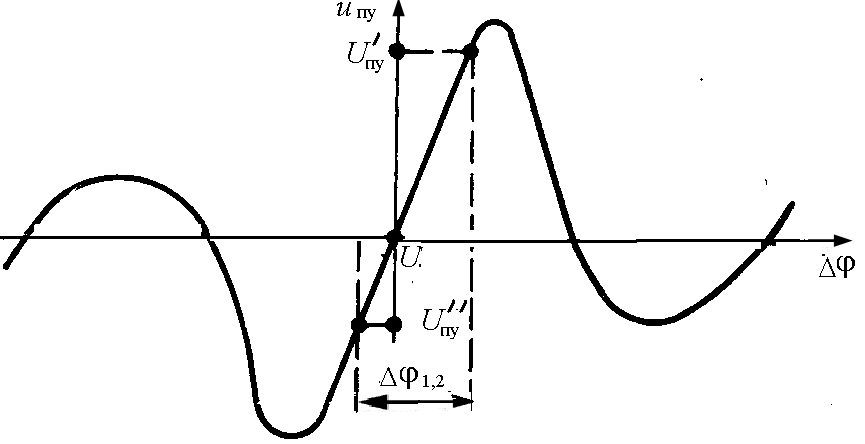
а
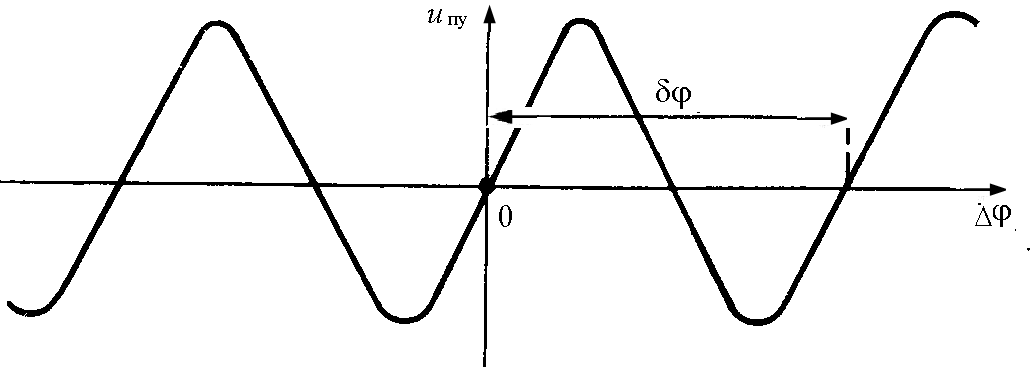
б
Рис. 47. Пеленгационные характеристики системы АСН без учета АРУ (а) и с учетом АРУ (б)
Так как устройство АРУ работает по сигналу суммарного канала, амплитуды выходных сигналов УПЧ
.
В рабочем диапазоне амплитуд выполняется , тогда
.
После УПЧ сигналы u’(t) и u’(t) претерпевают ряд преобразований, и прежде всего подвергаются селекции по тому или иному параметру, например, по положению на временной оси (селекция по дальности) или по частоте Доплера (селекция по скорости).
Нужно заметить, что реализация моноимпульсных пеленгаторов по структурной схеме, приведенной на рис. 44, практически невозможна из-за трудностей, связанных с необходимостью обеспечения идентичности и стабильности во времени фазовых характеристик УПЧ1 и УПЧ Если между сигналами u(t) и u(t) при прохождении через эти усилители возникает дополнительная разность фаз п/2 , то работоспособность системы АСН будет полностью нарушена.
В связи с этим реально используют приемные каналы с одним УПЧ. В импульсных РЛС сигналы u(t) и u(t) сначала смещают по времени (это системы с временным разделением) путем задержки одного из них, например, u(t) на некоторое время, а затем снова совмещают по времени за счет задержки u(t) на то же время такой же линией задержки. В РЛС с непрерывными сигналами применяют иные методы сведения и разделения сигналов на входе и выходе УПЧ. Но эти операции не влияют на оценку возможности создания помех.
Сигналы u(t) и u(t) поступают на фазовый детектор (ФД) с коэффициентом передачи kфд. Здесь эти сигналы перемножаются и усредняются. На выходе ФД выделяется сигнал
.
Если фазовые характеристики каналов усиления u(t) и u(t) идентичны , то
.
Полученное напряжение направляется к усилителю постоянного тока (УПТ).
Условия эффективности создания рассматриваемых помех требуют, чтобы воздействие помех приводило к нарушению селекции. Из последнего выражения следуют два вывода.
1. Если входной сигнал промодулирован по амплитуде, например, пеленгуется передатчик АМШП, то быстродействующая АРУ демодулирует его и пеленгование будет осуществляться без ошибок, обусловленных амплитудной модуляцией сигнала.
Если входной сигнал промодулирован по частоте или фазе, то в результате вычитания текущих фаз сигналов (t) и (t) в ФД эта модуляция будет устранена. Следовательно, передатчики ЧМШП и ФМШП будут пеленговаться без ошибки.
Обобщая эти выводы, можно сказать, что с помощью одного передатчика (из одной точки) принципиально невозможно создать помехи каналу АСН с моноимпульсным пеленгатором. Исключение составляют кроссполяризационные помехи (которые будут рассмотрены ниже).
В реальных условиях меняется во времени не более, чем в 1,25…1,5 раза. При этом динамический диапазон АРУ может составлять 60…100 дБ, тогда как УБЛ составляет -30…-50 дБ относительно уровня главного лепестка. Поэтому под каким бы углом относительно РСН не наблюдалась бы цель, ее сигнал превышает чувствительность приемника, последнее выражение оказывается справедливым. Так как изменение не связано с абсолютным значением , а формируется как отношение их разности к сумме, то практически не зависят от того, в каком лепестке диаграммы направленности (ДН) находится цель – постановщик помех. Важно, чтобы мощность помехи превышала чувствительность РЛС.
ДН аппроксимируется функцией . Наличие боковых лепестков предполагает возможность неоднозначного измерения угла и сопровождение цели-постановщика помех (см. рис. 47).
Все меняется, если в угле зрения находятся два постановщика помех, разнесенных в пространстве на угол 1,2 (рис. 48) [4]. Допустим, что мощности сигналов обоих источников равны. В этом случае выходное напряжение пеленгатора обращается в нуль, когда равно по величине и обратно по знаку. Отсюда следует, что РСН будет направлено по медиане между направлениями на цели.
Рис. 48. К созданию некогерентных помех из двух точек пространства
Естественно, что при разных мощностях источников помех это равенство углов нарушится в пользу более мощного источника. В связи с тем, что приемник с АРУ является нелинейным устройством, решение задачи об определении ориентации РСН при действии двух не равных по мощности источников сигнала весьма сложно. В первом приближении можно считать, что угол 1,2 будет разделен РСН на две части – ’ и ”, как это показано на рис. 48, в соотношении
.
Таким образом, при создании некогерентных помех из двух точек пространства (при условии нарушения работы автоселектора) АСН работает с ошибкой, поскольку РСН сопровождает энергетический центр базы этих источников. Некогерентные помехи из двух точек (как и другие помехи из нескольких точек) увеличивают промах ракеты за счет того, что РСН РЛС ориентировано в направлении между целями.
Целесообразность применения некогерентных помех из двух точек также обусловлена тем, что с их помощью одновременно производят и срыв слежения по дальности (или скорости). Отношение Р2/Р1 при сопровождении парной цели непрерывно изменяется во времени за счет амплитудных флюктуаций отраженных сигналов. Ориентация РСН между целями также изменяется. Вследствие этого появляется ошибка в измерении угловой скорости . Определение упрежденного положения парной цели становится практически невозможным.
6.3. Мерцающие помехи системам АСН
Мерцающими называют помехи, создаваемые системам АСН двумя и более передатчиками, разнесенными в пространстве и работающими в прерывистом режиме (рис. 49,а).
Если передатчики работают последовательно в соответствии с графиком рис. 49,б, то мерцающие помехи называются синхронными. Если же процессы включения и выключения передатчиков осуществляются независимо, помехи называются асинхронными.
Для создания мерцающих помех могут использоваться шумовые сигналы, нарушающие работу системы селекции полезных сигналов по дальности или скорости (АСД и АСС). В простейшем случае передатчики мерцающих помех могут представлять собой ретрансляторы сигналов РЛС, работающие в прерывистом режиме. Синхронные и асинхронные помехи по эффективности примерно одинаковы. В то же время создание синхронных помех требует наличия линии связи между постановщиками помех. Поэтому предпочтение должно быть отдано асинхронным помехам.
а
б
Рис. 49. К созданию мерцающих помех
Анализ синхронных помех является более простым. В связи с этим рассмотрим именно этот вид помех.
Пусть в угле зрения ДНА РЛС находятся два постановщика помех – ПП1 и ПП2, создающие мерцающие помехи (рис. 49,а, б). Мощности передатчиков помех в данном случае роли не играют. Необходимо только выполнить условия:
,
где kП – коэффициент подавления для используемого вида помехового сигнала. РЛС наблюдает источники, разнесенные на угол
,
изменяющийся по закону, приведенному на рис. 50, а.
Период мерцания ТМ выбирается таким, чтобы система АСН за время t=TM/2 успевала перейти с сопровождения одного источника на сопровождение другого. Очевидно, что это условие будет выполняться, если частота мерцаний FM= 1/TM находится в пределах полосы пропускания системы АСН, как это показано на рис. 50,б. Полоса пропускания системы АСН FАСН у РЛС составляет 0,25…1,5 Гц, а у головок самонаведения – 1…3 Гц.
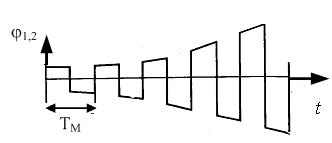
а б
Рис. 50. К созданию двухточечных мерцающих помех: а – входной угол системы АСН; б – АХЧ системы АСН
Если частота FM > FАСН («быстрые» мерцания), то этот вид помех становится эквивалентным некогерентным помехам из двух точек. Разница состоит лишь в том, что из-за выравнивающего действия АРУ нет необходимости выполнять условие Р1 = Р
Функция j1,2(t) является нестационарной. Вследствие этого спектр ее будет сплошным. Входным воздействием системы АСН является лишь первая гармоника j1,2(t) – остальные не попадают в полосу пропускания FАСН системы АСН.
Если частота мерцаний FM выбрана в пределах полосы пропускания системы АСН (FM FАСН), то динамической ошибкой слежения за источниками помех можно пренебречь.
Рассмотрим воздействие мерцающих помех на систему самонаведения ракет (рис. 51) [4].
Привод рулей ракеты имеет существенно меньшую инерцию (более широкополосен), чем система АСН. Очень быстро (до (40…50)°/с) изменяется и угол атаки ракеты. Поэтому можно считать, что система управления практически без инерции воспроизводит нормальное ускорение, задаваемое угловой скоростью линии визирования. Так что ракета будет совершать примерно синусоидальный маневр в плоскости постановщиков помех. На некоторой дальности ракета начнет маневрировать, упреждая фиктивный, имитированный помехой маневр цели.
Но главный эффект воздействия мерцающих помех проявляется не в этом. Так как весь полет ракеты происходит с максимальными углами атаки, то коэффициент ее лобового сопротивления резко возрастет (рис. 51). Скорость полета будет быстро падать, и, не достигнув цели, ракета самоликвидируется. Можно убедиться, что при подавлении мерцающими помехами и других видов оружия ПВО поражение постановщиков помех практически исключено.
Рис. 51. Поведение самонавонаводящейся ракеты при наведении на пару постановщиков синхронных мерцающих помех
Преимущество мерцающих помех по сравнению с некогерентными из двух точек состоит также в том, что поочередная работа передатчиков в 2…3 раза увеличивает угол разрешения источников, достигая значений jрм= =(1,44…2,5)j0= (0,7…1,25)0,5. Если же используются достаточно мощные передатчики помех, то разрешение может вообще не наступить из-за влияния боковых лепестков диаграммы направленности антенны РЛС.
6.4. Кроссполяризационные радиоэлектронные помехи системам
АСН
Кроссполяризационной помехой [4] называют радиосигнал, повторяющий полезный по времени и спектральным характеристикам, но имеющий поляризацию, ортогональную к поляризации сигналов подавляемой РЛС.
В простейшем случае этот вид помех создается методом ретрансляции сигнала подавляемой РЛС с поворотом плоскости поляризации на 90° (рис. 52).
Рис. 52 Структурная схема станции кроссполяризационных помех
Здесь через обозначены мгновенные значения векторов потока мощности (Пойтинга), магнитной и электрической составляющих поля соответственно. Создание данных помех возможно потому, что все линейно-поляризованные антенны наряду с сигналами на основной поляризации принимают, хотя и с большим ослаблением (от 10 до 20, а при принятии специальных мер и до 30…40 дБ), сигналы с ортогональной поляризацией (кроссполяризацией). Это связано с особенностями распределения токов, наводимых полем в элементах антенны, появлением у этих токов составляющих, ортогональных вектору поля, облучающего антенну.
Например, у зеркальных антенн магнитная составляющая поля помехи вызовет на поверхности зеркала появление поверхностных токов, текущих по криволинейным траекториям (рис. 53,б). Поскольку само зеркало имеет кривизну, наведенные в двух соседних точках токи не синфазны. Поверхностный ток в любой точке зеркала можно разложить на горизонтальную Jx и вертикальную Jy составляющие. Если фронт волны совпадает со срезом зеркала и последнее симметрично, то в левой и правой его половинах можно найти две точки, в которых горизонтальные составляющие тока Jx противоположны по направлению и вызванные ими поля будут взаимно компенсироваться. Таким образом, поле горизонтальных составляющих тока в сумме равно нулю. Следовательно, диаграмма направленности такой антенны на ортогональной поляризации имеет нуль, если фронт волны совпадает с плоскостью раскрыва антенны, т.е. поле помехи вертикальной поляризации не принимается антенной с горизонтальным вибратором – облучателем.
а б
Рис. 53. Кроссполяризационные помехи системам АСН:
а – ориентации фронта ЭМВ и зеркала антенны; б – наведенные токи
Прием вертикально поляризованной электромагнитной волны будет возможен только в том случае, когда поверхностные токи будут иметь нескомпенсированную горизонтальную составляющую.
Положение меняется, если источник излучения отклонится в произвольной плоскости, не совпадающей с осями х и у. За счет запаздывания (фазового сдвига токов в секторах зеркала) компенсации поля в окрестностях облучателя нет, т. е. iу0, антенна принимает сигналы и с ортогональной поляризацией.
ДНА при приеме кроссполяризованного поля не совпадает с ДНА по основной поляризации. Амплитудная диаграмма зеркальной антенны при приеме кроссполяризованного поля вместо одного имеет четыре максимума, совпадающих с плоскостями, проходящими через оси, повернутые на 45° относительно осей х и у. Примерный вид сечения диаграмм направленности [29] плоскостью, нормальной к раскрыву антенны и проходящей через ось , повернутую на 45° относительно осей х и у, показан на рис. 54,а,б,в.
Типичные схемы расположения лепестков ДН антенны амплитудной суммарно-разносной моноимпульсной системы показаны на рис. 55.
Рис. 54. Кроссполяризационные помехи системам АСН:
а,б,в – ДН на основной и кроссполяризационной составляющих поля,
г – формы пеленгационных характеристик
а б в
Рис. 55. Типичные схемы расположения лепестков ДН антенны на согласованной и кроссполяризации: а – суммарной; б – разностной азимутальной; в – разностной угломестной
С изменением ДНА меняется и пеленгационная характеристика системы АСН. На рис. 54,б приведены характеристики для основной поляризации и кроссполяризации. Видно, что при приеме кроссполяризованного поля пеленгационная характеристика терпит разрыв, что соответствует полному нарушению работы следящей системы.
Рассматриваемый вид радиоэлектронных помех одинаково эффективен для подавления моноимпульсных систем АСН и систем АСН со сканированием ДНА.
Реализация таких помех связана с решением сложной технической задачи – весьма точным выдерживанием ортогонального положения плоскости поляризации помехи относительно плоскости основной поляризации антенны подавляемой РЛС. В самом деле, допустим, что поворот плоскости поляризации помехи осуществлен с ошибкой (рис. 56). Составляющая поля ЕС’=ЕП sin теперь будет выполнять роль полезного, а ЕП'=EП cos помехового сигнала.
Рис. 56. К расчету энергетических соотношений при создании кроссмодуляционной помехи
Отношение помеха/сигнал по мощности на выходе антенны
,
где b – ослабление в антенне мощности кроссполяризованного поля.
Пусть <<l, a k=kП. Тогда должно удовлетворяться условие
.
При b = 1/1000 (-30 дБ), kП =1, доп=1,8°.
Если учесть, что наряду с помехой на вход антенны РЛС поступает и полезный, отраженный от цели сигнал, то станет очевидным, что доп окажется еще меньшим.
Таким образом, для того чтобы кроссполяризационная помеха была эффективна, необходимо обеспечить весьма точный поворот плоскости поляризации помехового сигнала относительно плоскости поляризации сигнала подавляемой РЛС и иметь передатчик помех большой мощности.
6.5. Когерентные радиоэлектронные помехи системам АСН из двух точек пространства
Когерентные двухточечные радиоэлектронные помехи представляют собой сигналы, полностью аналогичные сигналам подавляемой РЛС (РГС), излучаемые двумя разнесенными на базу L<< антеннами [4]. Эти помехи хотя и относятся к двухточечным, однако их можно реализовать на одном постановщике помех. Для этого (рис. 57) на постановщике помех устанавливают три антенны: одну приемную – А2 и две передающие – А1 и А3, расположенные, например, на концах крыльев самолета и разнесенные на расстояние (базу) L. Станция помех работает следующим образом. Сигнал подавляемой РЛС, установленной в точке О, принимается антенной А2, усиливается в усилителе У и излучается антеннами А1 и А3.
Рис. 57. Геометрические соотношения при создании когерентных помех из двух точек пространства
Сигналы, излучаемые антеннами A1 и А3, имеют равные напряженности поля. Найдем поле в точке О, находящейся на расстоянии D2 от А
Если принять, что поля в раскрывах антенн А1 и A3
,
то в точке О эти поля запишутся в виде
, ,
где 1=D1/с; 3=D3/с – запаздывания сигналов, равные времени распространения сигналов e1(t) и e3(t). Фазовые набеги волн 1=01 и 3=03 в общем случае не равны. При D1,3>>L в любой точке на окружности с центром в А2 электрическая составляющая поля будет равна сумме
.
Полученное уравнение есть уравнение интерференции двух когерентных полей.
Вычислим характеристику направленности:
1=01=kD1 и 3=03= kD3, 3 -1=k(D3 -D1) =kLsin,
.
Очевидно, что амплитуда результирующего поля интерференции колеблется в пределах от Ет тах = 2Ет0 до Ет тin= 0. При этом фаза результирующего поля при переходе через нуль совершает скачок на . Диаграмму двух когерентных, равной мощности источников, разнесенных на L>>, можно представить в виде, показанном на рис. 58.
Положение первых нулей ДН соответствует углу 0:
.
Откуда при малых L:
и или .
Приняв =3 см, L = 30 м, получим 0,50,057°.
Представим далее, что антенна подавляемой РЛС занимает положение, симметричное относительно двух лепестков диаграммы Fп(). Очевидно, что сигнал на выходе антенны будет равен нулю, так как сигналы верхнего и нижнего относительно антенны лепестков противофазны и компенсируют друг друга.
Достоинством когерентных помех из двух точек является их универсальность. Они одинаково эффективны для подавления как АСН с моноимпульсными пеленгаторами, так и АСН с коническим сканированием луча.
а
б
Рис. 58. Диаграмма направленности двух разнесенных на базу когерентных источников
6.6. Особенности подавления систем АСН многоцелевых РЛС
Развитие способов быстрого сканирования ДНА в пространстве позволило создать многоцелевые РЛС, которые могут практически одновременно сопровождать несколько целей по дальности, скорости и направлению. Прежде всего, это относится к РЛС с фазированными антенными решетками (ФАР). В них путем изменения фазовых соотношений сигналов излучателей можно за весьма короткое время порядка нескольких микросекунд сориентировать ДНА в направлении на любую точку в пространстве обзора. Последовательно направляя ДНА с одной цели на другую и удерживая ее в этом направлении любое, наперед заданное время, измеряют координаты цели, на которую направлена в данный момент диаграмма. Затем диаграмма направляется на другую цель и т. д. Число таких целей может достигать нескольких десятков. Естественно, что такой прерывистый режим работы РЛС отражается и на ее оценке как объекта РЭП [30].
Особенность РЛС (как объекта РЭП) состоит в том, что цель в каждом цикле измерений облучается конечное время, то есть все системы АСЦ работают в дискретном режиме [4]. Между циклами облучения цели ее координаты изменяются. Поэтому наряду с автосопровождением в обычном понимании этого процесса в системе АСЦ предусматривается экстраполяция (предсказание) изменения измеряемой координаты во времени с использованием информации о ее значениях, полученных в предыдущих циклах измерений. Дискретный характер облучения каждой цели уменьшает энергию полезного сигнала, накапливаемую системой АСН, и тем самым снижает ее помехоустойчивость. В самом деле, для облучения каждой из Nц, целей отводится время Tобл Tобз / Nц, где Tобз – время, отводимое на облучение всех Nц сопровождаемых целей, т. е. интервал дискретности работы каналов АСЦ.
Выбор Tобз ограничен как сверху, так и снизу. Ограничение сверху диктуется необходимостью не допустить за время Tобз ухода цели из ДНА, а снизу – временем установления процессов в каналах сопровождения каждой из целей.
При определении Tобл каждой из Nц целей следует учитывать, что канал АСН работает по сигналу, отселектированному по дальности или частоте Доплера. Процесс установления сигналов в автоселекторах по дальности и скорости также требует определенного времени. Если, например, РЛС является когерентной импульсной с селекцией цели по частоте Доплера, то система АСН начинает функционировать (накапливать энергию сигнала) только после установления колебаний в соответствующем узкополосном (доплеровском) фильтре системы АСС. Минимальное время накопления сигнала составляет несколько десятых долей секунды.
Особенностью дискретно работающих каналов АСН РЛС с ФАР является неподвижность последней. В каналах АСН одноцелевых РЛС с подвижными антеннами угловая скорость визирования цели измеряется датчиками угловой скорости (ДУС), устанавливаемыми на зеркале антенны. При использовании ФАР это невозможно, определяется путем дискретного дифференцирования измеренных значений угловых координат. В простейшем случае за оценку угловой скорости принимается величина
,
где i+1 и i – значения угловых координат цели, полученные в i+1 и i-м циклах облучения цели соответственно. Конечно, при определении могут учитываться данные об угловых координатах, полученные и в предшествующие i-1; i-2, ... циклы облучения, т.е. сигнал угловой скорости может формироваться как результат ее экстраполяции за несколько циклов облучения.
Характерной особенностью РЛС с ФАР является совмещение в них режимов обзора и автосопровождения. Поэтому такие РЛС принято называть многофункциональными. Совмещение указанных режимов может быть реализовано различными способами.
Простейшим из них является способ сопровождения [4], суть которого иллюстрируется рис. 59. ДНА сканирует с постоянной скоростью ск во всем секторе углов обзора Ф по азимуту и углу места, осуществляя, например, построчный обзор пространства. Если в пределах ДНА имеются цели (Ц1 и Ц2), то на выходе приемника образуются пачки импульсов, огибающие которых (рис. 59,б) повторяют форму ДНА. Задача измерения угловой координаты, выбранной для сопровождения цели (целей), сводится к измерению временных интервалов Т1 и Т2 от начала движения ДНА из крайнего положения (начало координат) до направления, соответствующего направлению на цель (центр пачки отраженных импульсов).
а б
Рис. 59. К пояснению работы системы АСН со сканирующим лучом
Но этот способ имеет ряд недостатков. По своей сути он является амплитудным. Поэтому системе АСН, использующей этот способ, могут быть созданы помехи из одной точки пространства путем модуляции помехового сигнала по амплитуде. Очевидно, что за счет воздействия AM помехового сигнала форма пачки импульсов будет искажаться. Вследствие этого определение центра пачки импульсов, а, следовательно, и определение направления на цель будут производиться с ошибкой. Второй недостаток способа состоит в том, что сканирование должно осуществляться достаточно медленно, так как для точного измерения координаты необходимо накопить достаточно большую энергию. Кроме того, реализация сканирования ДНА в двух плоскостях является довольно сложной.
В то же время ФАР предоставляет возможность весьма быстро менять положение ДНА, направляя ее в любую точку в пределах углов обзора по заданной программе в обеих плоскостях. Поэтому для рассматриваемых РЛС характерен иной режим работы. На первом этапе обзор пространства осуществляется обычным построчным (или иным) обзором однолепестковой ДНА, в формировании которой участвуют все элементы ФАР. В этом режиме угловые координаты определяются грубо по максимуму амплитуды сигнала на выходе селектора целей и по скорости для данной дальности. Далее по результатам обзора пространства и данным целеуказания цели, подлежащие уничтожению, берутся на автосопровождение. Для этого ДНА ФАР направляется поочередно на выбранные для сопровождения цели и удерживается в направлении каждой из них заданное время.
В промежутках между облучениями ФАР проводит обычное сканирование, обеспечивая тем самым получение информации о воздушной обстановке.
Современные РЛС используют моноимпульсные пеленгаторы с суммарно-разностной обработкой сигналов. Для реализации метода ФАР при приеме сигналов в каждой из плоскостей пеленгации делится на две равные части. Каждая из таких половин путем суммирования сигналов вошедших в нее облучателей формирует свою диаграмму. При этом фазовые соотношения в элементах подбираются так, что диаграмма одной половины смещается относительно другой на угол 0=0,5/ Дальнейшие преобразования сигналов осуществляются так же, как и в одноцелевых РЛС АСЦ.
Так как антенна остается неподвижной, то измеренная угловая координата цели определяется как ци = цз + цп . Здесь цз = (з1 + з2)/2 –положение РСН относительно нормали к плоскости ФАР, заданное фазовыми соотношениями сигналов облучателей; цп – отклонение цели относительно РСН, определенное моноимпульсным пеленгатором.
РЛС с ФАР всегда включает в свой состав ЭВМ и ряд управляемых ею процессов: сканирования, селекции целей по скорости, дальности и т.д. Естественно, что число выходных цепей пеленгаторов должно соответствовать удвоенному числу одновременно сопровождаемых целей.
ЭВМ осуществляет экстраполяцию угловых координат целей по измеренным значениям их пеленгов, вычисление их угловых скоростей, а также управляет подключением соответствующих селекторов к цепям пеленгаторов.
При использовании моноимпульсных пеленгаторов в многофункциональных РЛС создание помех из одной точки невозможно, так же как и в одноцелевых РЛС с зеркальными антеннами.
Подавление систем АСН в подобных РЛС должно осуществляться путем создания помех из нескольких точек, рассмотренных выше.
Кроме того, в РЛС с дискретным (прерывистым) облучением следует ожидать более высокой эффективности воздействия уводящих по дальности и скорости сближения помех на работу канала АСН.
6.7. Радиоэлектронные помехи системам АСД
Системы АСД, входящие в состав импульсных РЛС АСЦ, решают задачи селекции сигналов сопровождаемой цели по временному запаздыванию (дальности) и автоматического измерения дальности до цели, а при необходимости по скорости сближения с ней.
По определению [4], селекция есть выделение сигнала сопровождаемой цели из смеси сигналов и помех, поступающих на вход приемника. Для решения задачи селекции в автодальномерах используется различие во времени запаздывания
3=2Dц/с
сигналов, отраженных от целей, находящихся в угле зрения РЛС. Для селекции целей приемник РЛС открывается на короткое время стр. Поэтому, если разность времен составляет 3 стр, на выход приемника будет поступать сигнал одной и только одной цели.
Расстояние до цели непрерывно меняется, поэтому момент открывания (стробирования) приемника должен также изменяться по закону
3(t)=2Dц(t)/с.
Следовательно, система АСД должна сопровождать цель по 3 (дальности). При этом автоматически решается задача измерения дальности и скорости сближения.
Известно, что система АСН может функционировать только в том случае, когда на нее поступает сигнал одной и только одной цели. Следовательно, подавление системы АСД нарушает одновременно и работу системы АСН. Обычно в этом случае РЛС переходит в режим пеленгования источника радиопомех, определяя только направление на него.
Рассмотрим работу системы АСД некогерентной импульсной РЛС в условиях помех [4]. Структурная схема такой системы АСД приведена на рис. 60. Синхронизатор (Синхр.) одновременно запускает передатчик (Прд) и цепь управляемой временной задержки (ЦУВЗ). Отраженный сигнал через антенный переключатель поступает на вход приемника. Последний нормально закрыт и открывается только на время, равное длительности стробирующего импульса (строба) стр. В режиме поиска сигнала от импульса к импульсу положение строба меняется на t<< стр так, что приемник как бы «просматривает» интервал возможных задержек отраженного сигнала.
Для осуществления поиска на вход интегратора подается постоянное напряжение U0, так что на ЦУВЗ поступает напряжение
uD=U0t.
Задержка импульса в ЦУВЗ 3(t) =kuD(t). Поэтому она изменяется в процессе поиска скачками на t от импульса к импульсу. Задержанный таким образом импульс запускает генератор полустробов (ГПС): раннего ир и позднего ип. Последние представляют собой видеоимпульсы, примыкающие друг к другу и примерно равные по длительности зондирующему импульсу (рис. 61,а). Суммируясь в сумматоре полустробы образуют строб истр (рис. 60).
Рис. 60. Структурная схема системы АСД
а
б
Рис. 61. К пояснению работы временного различителя:
а – временные соотношения; б – дискриминационная характеристика временного различителя
С того момента, когда строб начинает совпадать с отраженными от цели сигналами, на выходе приемника в каждом цикле работы АСД появляется видеоимпульс цели ис. Последний поступает на накопитель автомата захвата. В исходном состоянии напряжение на накопителе равно нулю. Каждый видеоимпульс вызывает приращение напряжения ui на ui. Скорость поиска (перемещения строба по шкале задержек) выбирается так, чтобы число принятых импульсов было
.
Переключение системы АСД из режима поиска в режим автосопровождения осуществляется автоматически с помощью реле захвата. Срабатывание реле происходит при достижении напряжением накопителя порога срабатывания реле Uпор. Обычно порог срабатывания выбирают так, что уже при приеме N' = NИ/2 импульсов напряжение накопителя достигает Uпор. Контакты реле захвата (РЗ) переключают в РЛС ряд цепей. Важнейшие из них показаны на рис. 60. Прежде всего контакты 2, 3 отключают от входа интегратора источник напряжения поиска U0 и замыкают следящую систему дальномера. Кроме того, замыкаются контакты 1, и цель начинает сопровождаться по направлению.
Если по тем или иным причинам напряжение накопителя упадет ниже Uпор, то и система АСД перейдет в режим поиска.
Чтобы система АСД не теряла сопровождения цели при естественных замираниях отраженного сигнала, напряжение на накопителе после прекращения приема сигналов пропадает не сразу, а через время пам = =0,2…1 с, называемое «временем памяти» дальномера. Если импульсы сигнала вновь начнут поступать на вход приемника, не выходя за пределы строба стр, то автосопровождение цели восстановится.
Чувствительным элементом системы АСД является временной различитель (ВР). Выполняемые им функции поясняются рис. 61. Ранний uр и поздний ип полустробы в нем совпадают с импульсом сигнала ис, вырабатывая напряжения, пропорциональные совпавшим частям импульсов (заштрихованы на рис. 61,а). Разность этих напряжений образует выходное напряжение, пропорциональное величине временного рассогласования . Если импульс цели ис смещается относительно линии раздела полустробов, то появляется напряжение uвр, отображающее знак и величину возникшего рассогласования. Напряжение ивр. интегрируется и изменяет ивр в направлении 0 . Очевидно, что
, .
Для подавления системы АСД применяются два вида помех: маскирующие (непрерывные шумовые) и имитирующие (уводящие по дальности).
В качестве маскирующих могут использоваться все известные виды шумовых помех. Подавление системы АСД эквивалентно подавлению РЛС обзора с той лишь разницей, что коэффициент подавления для системы АСД (при прочих равных условиях) всегда будет иметь меньшие значения, чем для обзорных РЛС. Именно этим объясняется то, что у всех РЛС, работающих в режимах обзора (обнаружения), дальность действия в 1,5…2 раза больше дальности РЛС, работающей в режиме АСЦ. Из всех систем АСЦ система АСД является наименее помехозащищенной.
Шумовые помехи создаются в целях полного нарушения работы системы автосопровождения цели по дальности. Анализ воздействия таких помех чрезвычайно сложен. Коэффициент подавления системы АСД для этих помех определяется экспериментально.
Качественно срыв режима автосопровождения цели по дальности при воздействии шумовых помех можно пояснить следующим образом. При воздействии шумовых помех на выходе приемника РЛС образуются случайные по амплитуде видеоимпульсы шумов длительностью стр. Напряжения на выходах накопителя ин и временного различителя становятся при этом случайными функциями времени. Напряжение , будучи проинтегрированным, делает случайным и напряжение на выходе интегратора uD, а вместе с тем и задержку строба 3. Всегда (при любом отношении k = PП/PC>0) существует большая или меньшая вероятность события, состоящего в том, что строб, перемещаясь под воздействием шумов по случайному закону, займет положение, при котором полезный сигнал оказывается вне строба. В этом случае на накопитель перестают поступать импульсы полезного сигнала, напряжение на его выходе становится случайным и в некоторый момент времени принимает значение, меньшее порогового Unop. АСД переходит в режим поиска.
Срыву сопровождения цели способствует частичное подавление шумом полезного сигнала в амплитудном детекторе приемника и за счет действия АРУ. При действии шумов амплитуда видеоимпульсов цели, поступающих на вход временного различителя, уменьшается, а вместе с этим уменьшается и крутизна его характеристики:
,
что и отражено на рис. 61,б. Система АСД теряет чувствительность по рассогласованию и с ростом отношения k = PП/PC отслеживает цель все с большей динамической ошибкой. Поэтому коэффициент подавления АСД kП зависит не только от выбора его параметров, но и от скорости сближения с целью, прикрываемой шумовыми помехами.
При поиске полезного сигнала в шумах на накопитель поступает шум и напряжение на нем в случайные моменты времени может достигать Uпор или оказываться меньше его, то есть система АСД в случайные моменты времени осуществляет ложные захваты и сбросы. Практически, если под воздействием помех произошел срыв сопровождения, то оно больше уже не восстанавливается.
Заметим, что в связи с высокой эффективностью шумовых помех все современные РЛС и РГС имеют пассивный режим сопровождения цели (источника помех) по угловым координатам. В этом режиме АСД отключается и на вход системы АСН поступают шумы с выхода приемника. Угловые координаты в этом случае могут определяться практически без дополнительных ошибок.
Помехи, уводящие систему АСД с сопровождаемой цели, имитируют ложную цель, летящую со скоростью, отличающейся от реальной скорости постановщика помех, и находящуюся на расстоянии от РЛС, на котором цели нет. Упрощенная структурная схема станции уводящих по дальности помех [4] представлена на рис. 6
Рис. 62 Структурная схема станции уводящих по дальности помех
Принятый и усиленный сигнал подавляемой РЛС поступает на амплитудный детектор (АД) и устройство кратковременного запоминания частоты (КЗЧ). Видеоимпульс с выхода АД запускает ЦУБЗ. Время задержки запускающего ЦУВЗ импульса зависит от значения управляющего напряжения uупр. Закон изменения uупр определяет последовательное перемещение по шкале времени зи (t) формируемых в передатчике импульсов помех. В простейшем случае используют линейное возрастание зи (рис. 63).
С другой стороны, принятый и усиленный сигнал подавляемой РЛС поступает на вход устройства КЗЧ, которое работает так, что на его выходе образуется непрерывное синусоидальное колебание с частотой fп, удовлетворяющей условию |fп–f0 | fпрм/2, где fпрм – полоса пропускания приемника подавляемой РЛС.
Рис. 63. Временной график работы станции уводящих помех по дальности
Модулятор открывается только в момент появления на его управляющем входе задержанного видеоимпульса. В открытом состоянии модулятора на его выход поступает отрезок синусоидального сигнала с несущей частотой п длительностью и. После усиления сформированный таким образом помеховый сигнал излучается в направлении подавляемой РЛС.
Если на входе приемника РЛС отношение мощностей РП/РСkП, то система АСД переходит в режим сопровождения помехи. Естественно, что при этом как дальность до цели, так и скорость сближения с ней измеряются с ошибками. Ошибка измерения дальности изменяется от нуля и достигает максимального значения ув стр + и.
Указанные ошибки приводят к ошибкам расчета упрежденного положения цели в любой системе управления оружием ПВО.
Коэффициент подавления kп системы АСД зависит от многих факторов: длительности импульса сигнала и, скорости увода Vyв и др. Но в любом случае kП>1. Только в этом случае сигнал рассогласования на выходе временного различителя, обусловленный действием помехи, будет преобладать над сигналом рассогласования за счет воздействия сигнала, отраженного от цели.
Для нарушения работы системы АСН режим работы станции уводящих по дальности помех наряду с циклом увода Tув включает интервал «молчания», т. е. выключенного состояния станции помех длительностью ТМ. Если увстр +и, то после выключения станции помех на выход приемника РЛС перестает поступать как полезный, так и помеховый сигнал. Естественно, что через время, равное времени памяти пам автомата захвата, система АСД перейдет в режим поиска. Через время поиска пц цель будет взята на автосопровождение. В связи с этим время ТМ целесообразно выбирать так:
ТМ пам + пц ,
так как только в этом случае перерыв в поступлении информации в канал АСН будет достигать максимального значения. Величины пам и пц в зависимости от типа и назначения системы АСД могут варьироваться в широких пределах – от единиц до долей секунды.
Система АСН, не получая информации о движении цели по углам за время ТМ, накопит ошибку ее сопровождения по углу
,
где – угловая скорость линии визирования РЛС-цель.
За время ТМ возможен и выход цели за пределы ДНА РЛС, т.е. потеря сопровождения цели за счет действия уводящих помех.
В когерентных РЛС с малой скважностью процесс АСЦ по дальности значительно более сложный из-за неоднозначности измерения дальности. Но и для подавления таких систем могут использоваться как шумовые (маскирующие), так и уводящие по дальности (имитирующие) радиопомехи.
Отличие по результату воздействия на когерентные и некогерентные РЛС состоит в том, что при воздействии на последние они будут эффективными только в том случае, если не будут ослабляться за счет узкополосной фильтрации в доплеровских фильтрах, полоса которых в современных РЛС АСЦ составляет Fуф.= 500…1000 Гц. Следовательно, для подавления подобных РЛС должны применяться узкополосные (доплеровские) шумы, а уводящие помехи должны быть когерентными, то есть ошибка запоминания несущей частоты не должна превышать величины Fуф/ Задача эта весьма сложная. Поэтому подавление систем АСД когерентных РЛС с малой скважностью представляется наиболее целесообразным осуществлять шумовыми помехами.
7. Радиоэлектронное подавление систем военного назначения
с помощью компьютерных вирусов и электромагнитного оружия
7.1. Общие понятия о компьютерных вирусах и их основные
свойства
Широкое внедрение в военные электронные системы компьютерной техники, в том числе в системы ПВО, привело к появлению нового типа РЭП, основанного на использовании компьютерных вирусов, которые можно назвать компьютерным РЭП (КРЭП). Сущностью данного типа РЭП [3] являются разработки и введение радиоэлектронным способом в подавляемые системы таких программ (вирусов), которые бы нарушали работу компьютерных систем, искажали рабочие программы таким образом, что получаемые при этом результаты носили бы ложную информацию или приводили к разрушению уже верной информации. Преднамеренное использование компьютерных вирусов может привести к полному нарушению работы вычислительных сетей и систем и, как следствие, к блокировке нормальной работы системы ПВО.
Основными характеристиками программ-вирусов являются [3]: компактность, универсальность, способность к распространению, эффективность, многофункциональность и устойчивость.
Компактность программ-вирусов способствует их распространению на другие программы и усложняет их обнаружение.
Универсальность программ-вирусов заключается в том, что они способны воздействовать на различные прикладные программы. Во многих случаях при этом даже не требуется информация об инфицируемой программе.
Способность к распространению является неотъемлемой особенностью программ-вирусов. С помощью инфицированной им программы он может распространяться на другие программы и файлы, составляющие информационную систему. В этом смысле компьютерный вирус ведет себя подобно биологическому вирусу.
Эффективность программ-вирусов во многих случаях оказалась чрезвычайно высокой. В результате их действия наступала полная потеря информации, выход из строя программ и даже операционных систем.
Многофункциональность проявляется в разнообразии функциональных особенностей программ-вирусов. Некоторые компьютерные вирусы просто поражают прикладные программы, не затрагивая файлов данных и функций операционных систем. Другие могут быть нацелены на нанесение ущерба или уничтожение файлов. Эффективность программ-вирусов повышается вследствие того, что они могут себя не проявлять до определенного момента времени (наступления определенного события). Это позволяет вирусу выиграть время для распространения, пока пользователь пораженной системы не обнаружит его присутствия.
Устойчивость программы-вируса состоит в том, что даже после обнаружения устранение его является сложной проблемой, поскольку он способен повторно распространяться по системе от единственной инфицированной копии.
Основное различие между традиционным РЭП и КРЭП в том, что РЭП воздействует на элементы приемника подавляемой системы, а КРЭП – на процессоры данной системы. По своей специфике КРЭП больше всего подходит для дезорганизации тактических операций и в отличие от РЭП обладает свойством продолжения воздействия на подавляемую систему после передачи сигнала помехи. При этом принципы создания КРЭП открывают возможность воздействовать на объекты заблаговременно, тем самым устраняя элемент неопределенности при разработке оперативно-тактических планов.
Компьютерный вирус обладает свойством инфекционности и способен распространяться от системы к системе. После первоначальной имплантации эффект действия КРЭП распространяется на широкий круг пользователей, что позволяет осуществлять непрямое воздействие на интересующие объекты, т. е. посредством воздействия на другие более доступные и менее защищенные объекты, входящие в единую информационную систему. Программа-вирус может быть сориентирована на поиск конкретных систем, в которых она может находиться в пассивном состоянии до момента приведения в действие. Воздействие вируса может проявляться в различных формах: незаметном изменении функций пораженной системы, полном выходе системы из строя или в уничтожении файлов данных и программ.
Реализация КРЭП может быть скрытной. Вирусы могут распространяться и поражать систему незаметно для пользователей. Не зная о воздействии помехи, объект подавления не может принять своевременные меры по защите, т. е. внести изменения в программу работы или оказать противодействие.
7.2 Реализуемость компьютерного РЭП
Для того чтобы являться эффективным средством РЭБ, КРЭП должно быть надежным и целенаправленным. При наличии априорной информации об объекте подавления программа-вирус может вводиться в него заранее. Вирус воздействует на цифровые процессоры, распространяется и ожидает команды, чтобы стать активным. При этом важное значение приобретает получение информации о том, что вирус достиг места назначения и готов к действию. Такую информацию можно получить на основании наблюдения за работой линий передачи или по получении запрограммированных сообщений, предусмотренных в программе-вирусе.
Реализуемость КРЭП облегчается благодаря тенденциям развития радиоэлектронных систем, связанных с возрастающим использованием: распределенной цифровой обработки сигналов и данных; встроенных ЭВМ с изменяемой программой; сетевых систем связи; стандартных ЭВМ; стандартного программного обеспечения; стандартных линий передачи данных и форматов сообщений.
Все это диктуется снижением стоимости и упрощением техобслуживания сложных систем, повышением их быстродействия и информативности. В то же время возрастают возможности КРЭП, упрощается ввод программы-вируса.
Эффективность КРЭП [3] зависит от способности вируса распространяться и инфицировать систему. В большинстве случаев в современных системах боевого управлении, связи и разведки предусмотрены меры защиты от вмешательства противника. Однако специфика КРЭП позволяет во многих случаях обойти эти меры.
Существует четыре типа ввода вируса в подавляемую систему: непосредственный, посредственный, прямой и непрямой.
Непосредственный ввод предполагает использование среды, определяющей функционирование подавляемой системы. Например, если подавляемой системой является радиостанция тактического назначения, то при вводе вируса используются радиосигналы, поступающие непосредственно в антенну и приемное устройство. В системе боевого управления, связи и разведки вирус вводится непосредственно в приемное устройство по линии управления и передачи данных в надежде, что приемник отработает и, следовательно, имплантирует его. В результате распространения он будет инфицировать все системы, связанные с пораженной системой. При этом достаточно один раз преодолеть помехозащищенность системы в какой-то момент времени, чтобы потом действовать в ней независимо от дальнейших изменений режимов работы, увеличивающих помехозащищенность. Как известно, при реализации традиционного РЭП эффективность обеспечивается только в момент преодоления помехозащищенности приемника. Учитывая изложенное, КРЭП следует нацеливать на самое слабое звено в системе помехозащищенности поражаемого объекта
Опосредственный ввод вируса в систему предполагает использование иной среды, чем та, которая определяет ее назначение. Так, например, для ввода вируса могут быть использованы системы питания, стабилизации, терморегулирования РЭА, двигательные системы, прямо или косвенно электрически связанные с системой-объектом подавления.
Прямой ввод вируса предусматривает непосредственное воздействие на интересующий процессор. Он может быть осуществлен, например, путем непрерывной передачи программы-вируса во время приема подавляемым объектом нормальной передачи. Но при этом можно столкнуться с эффективной помехозащитой объекта.
Непрямой ввод может оказаться более предпочтительным. Он рассчитан на свойства инерционности вируса и предполагает использование для ввода программы-вируса наиболее уязвимого объекта, от которого вирус должен распространяться к целевому объекту. При этом можно применять инструменты материально-технического обслуживания и диагностики состояния интересуемой системы. Инфицируя контрольный процессор вирусом, можно поразить другие процессоры, входящие в данную систему, и тем самым достичь цели противодействия. Этот метод отличается простотой и высокой эффективностью, поскольку очень трудно предусмотреть меры, препятствующие распространению инфицированного вируса.
Существуют различные варианты применения КРЭП: «троянского коня»; вынужденного карантина; перегрузки (насыщения); зондирования; целевого поражения.
Вариант «троянского коня» предусматривает ввод вируса в пораженную систему и обеспечение пассивного его состояния до наступления установленного события или момента времени. Достоинство состоит в том, что вирус бездействует определенное время, не вызывая никаких подозрений.
Вариант вынужденного карантина предусматривает открытое внедрение в систему. В результате пораженный узел (устройство) отключается оператором из опасения распространения инфекции на другие узлы, что приводит к снижению эффективности работы подавляемой системы.
Вариант перегрузки предусматривает многократное дублирование программы-вируса в целях снижения пропускной способности и быстродействия системы.
Вариант зондирования предусматривает ввод компьютерного вируса в сеть с целью вывода из строя определенного файла, системы или другого объекта. В этом случае вирус распространяется и самоуничтожается во всех пунктах, пока не найдет целевой объект. После вывода из строя последнего программа-вирус самоуничтожается окончательно, не оставляя следов.
7.3. Защита от компьютерного РЭП
Проблема защиты от КРЭП более серьезная, чем защита от РЭБ, поскольку связана не только с защитой самого объекта, но и с защитой всех связанных с ним объектов. Последнее обусловливается способностью вируса распространяться от узла к узлу и от объекта к объекту. Стратегия защиты от КРЭП предусматривает [3]:
- воспрещение доступа, включающее в себя ряд мер, препятствующих проникновению вируса в систему;
- обнаружение вируса, если вирус проник в систему;
- локализацию вируса, сводящуюся к принятию мер для предотвращения его распространения;
- уничтожение (удаление) вируса до того, как он сможет нанести ущерб; восстановление файлов данных, если вирусу удалось нанести им значительный ущерб, используя для этого резервные копии файлов;
- оперативное резервирование, предусматривающее варианты операций без вывода из строя системы.
Реализация данной стратегии защиты, естественно, требует принятия соответствующих мер в отношении аппаратурного и программного обеспечения, а также выполнения условий строгого соблюдения правил эксплуатации и режимов работы.
В качестве аппаратурных мер защиты от КРЭП можно рекомендовать компакт-диски и другие типы ЗУ, воспрещающие доступ к выполняемым программам; электрическую изоляцию систем для предотвращения распространения вируса; использование в комплексе процессоров различных типов.
В качестве программных мер защиты от КРЭП рекомендуется:
- запрет доступа к центральным процессорным устройствам и программам, выполняющим несанкционированные функции;
- слежение за выполнением программ с целью обнаружения вируса; объединение операционных систем для предотвращения распространения вирусов. В этом случае вирус должен быть согласован с языком каждой системы; использование антивирусных программ для ликвидации вирусов в инфицированных программах;
- перегрузка программного обеспечения с целью дезинфекции. Инфицированные программы и файлы стираются и восстанавливаются по чистым копиям.
При эксплуатации в целях защиты от КРЭП необходимо:
- обеспечение строгого режима радиомаскировки; наблюдение за работой системы с целью обнаружения вируса; разработка и соблюдение правил эксплуатации системы, имеющих целью ограничить распространение вирусов в том случае, если им удалось проникнуть в систему;
- постановка в карантин инфицированных объектов для предотвращения распространения вирусов;
- разработка резервных планов на случай, если вирус нанесет серьезный ущерб. Поскольку вирусы могут затаиваться среди миллионов строк рабочей программы и проявлять себя в решающие моменты, меры защиты от них должны приниматься до того, как противник получит возможность их использовать.
7.4. Общие понятия об электромагнитном оружии
Сущность электромагнитного оружия (ЭМО) [3] заключается в создании кратковременных электромагнитных излучений большой мощности с целью воздействия на радиоэлектронные устройства и выведения их из строя. Эффект действия такого оружия обусловливается тем, что современные радиоэлектронные устройства насыщены полупроводниковыми приборами и элементами, весьма чувствительными к энергетическим перегрузкам. Поток электромагнитной энергии достаточно высокой плотности мощности способен выжечь полупроводниковые переходы таких приборов, полностью или частично нарушив их нормальное функционирование.
Наиболее легко повреждаются смесительные диоды радиолокационных и связных приемников, маломощные МОП-структуры логических элементов и даже полупроводниковые приборы электронных систем зажигания двигателей внутреннего сгорания.
Выход из строя полупроводниковых приборов вызывается обычно их перегревом электромагнитной энергией из-за малых размеров полупроводниковых переходов.
Напряжение пробоя переходов невысокое и составляет величину от единиц до десятков вольт в зависимости от типа прибора. Так, для кремниевых высокоточных биполярных транзисторов, обладающих повышенной прочностью к перегревам, напряжение пробоя меняется от 15 до 65 В. У арсенид-галлиевых полупроводниковых приборов этот порог составляет 10 В. Устройства памяти с произвольным доступом, составляющие существенную часть любого компьютера, обычно имеют пороговые напряжения примерно 7 В. Типовые логические ИС на МОП-структурах – от 7 до 15 В, а микропроцессоры обычно прекращают свою работу при напряжениях 3,3...5 В.
Помимо разрушения полупроводниковых элементов электромагнитный импульс при среднем уровне плотности мощности может вызвать парализацию электронного устройства, сущность которой заключается в потере работоспособности на определенный интервал времени. Это может происходить от перегрузок приемоусилительных устройств, приводящих к потере их чувствительности, и от процессов восстановления нормального состояния функционирования. При этом разрушения (необратимого выхода из строя) полупроводниковых элементов не происходит.
Электромагнитное оружие в настоящее время рассматривается как одно из наиболее эффективных средств ведения информационной борьбы. Это обусловливается значимостью информационных потоков в различных сферах деятельности, включая управление экономикой, производством, обороной страны. Информационная система предусматривает постоянный обмен управленческими решениями и сообщениями о их выполнении. В ее состав практически включается множество радиоэлектронных устройств сбора и обработки информации, нарушение функционирования которых разрушает систему со всеми вытекающими из этого последствиями.
Так, при ведении боевых операций первостепенное значение приобретают средства связи и целеуказания. Для сбора необходимой информации и ее использования применяют радиолокационные станции различного назначения, системы командования, управления и связи, радио и радиотехническую разведку. Все эти средства представляют собой объекты воздействия электромагнитного оружия, поражение которых приведет к дезинформации информационной системы, к снижению эффективности или полному нарушению работы системы ПВО и ПРО.
По характеру действия электромагнитное оружие может рассматриваться как оружие массового поражения радиоэлектронных средств. В соответствии с этим при планировании боевых операций уделяется большое внимание его применению на начальном этапе боевых операций, предшествующем широкомасштабному наступлению.
7.5. Пути проникновения электромагнитного импульса в
радиоэлектронную аппаратуру
По спектральным характеристикам ЭМО можно разделить на два вида: низкочастотное, создающее электромагнитный импульс (ЭМИ) со спектром на частотах ниже 1 МГц, и высокочастотное (микроволновое), обеспечивающее электромагнитное воздействие в СВЧ-диапазоне [3]. Оба эти вида также различаются по технике реализации и в какой-то мере механизму воздействия на радиоэлектронные устройства.
Проникновение низкочастотного электромагнитного импульса на элементы радиоэлектронного устройства обусловливается в основном наводками на элементы устройства и особенно на каналы внешнего питания, подачи и съема информации. Пути проникновения электромагнитного поля СВЧ-диапазона более обширные, они включают не только элементы наводки электромагнитного поля, но и прямое проникновение в радиоэлектронную аппаратуру через антенную систему, поскольку спектр СВЧ-поля охватывает рабочую частоту подавляемой аппаратуры. Энергия СВЧ также может проникать через отверстия и стыки в корпусах аппаратуры. В первом случае величина проникающей энергии будет максимальной в рабочем диапазоне антенны. Проникновение энергии через отверстия и стыки зависит от их размеров и длины волны электромагнитного импульса. В этом случае существуют сильные резонансные явления на различных частотах. Очевидно, наиболее сильная связь наблюдается на резонансных частотах отверстий корпуса, то есть в том случае, когда длина волны соизмерима с размерами отверстий. Связь резко уменьшается на волне, длиннее резонансной волны отверстий. Поэтому воздействие низкочастотного электромагнитного оружия в значительно меньшей степени связано с наводками через отверстия и стыки в корпусе аппаратуры. На частотах выше резонансной частоты наблюдается более медленный спад степени связи. Но за счет множества типов колебаний в объеме корпуса аппаратуры возникают острые резонансы.
Если поток СВЧ-энергии достаточно интенсивен, то воздух в отверстиях и стыках ионизируется и становится хорошим проводником, экранирующим от проникновения электромагнитной энергии. Учитывая это, увеличение падающей на объект энергии может привести к уменьшению электромагнитной энергии, воздействующей на аппаратуру и, как следствие, к снижению эффективности воздействия ЭМИ.
7.6. Реализация электромагнитного оружия
7.6.1. Техника реализации низкочастотного электромагнитного оружия [3]. Генерация электромагнитного импульса и его действие наблюдались при первом высокоатмосферном ядерном взрыве. Эффект характеризовался возникновением очень короткого (сотни наносекунд), но интенсивного электромагнитного импульса, порождавшего мощное электромагнитное поле, действовавшее на электромагнитные устройства различных типов. Наносимые при этом повреждения были схожи с повреждениями от ударов в непосредственной близости к аппаратуре электрических молний.
Экранирование электронных устройств при этом обеспечивает только частичную защиту, так как любой кабель (провод), идущий к аппаратуре или выходящий из нее, уподобляется антенне и передает кратковременные воздействия на аппаратуру. Компьютеры, использующиеся в системах обработки данных, системах связи, дисплеях, управляющих производственных системах, включая шоссейную и железнодорожную сигнализации, РЛС, электронное военное оборудование, спутники, аппаратура связи УВЧ, ОВЧ, ВЧ и низких диапазонов и телевизионная аппаратура – все является потенциально уязвимым по отношению к электромагнитному импульсу.
Основным техническим средством реализации мощных электромагнитных импульсов, составляющих основу низкочастотного электромагнитного оружия, в настоящее время является генератор с взрывным сжатием магнитного поля, обеспечивающий создание электрической энергии в десятки мегаджоулей в промежутки времени от десятков до сотен микросекунд. При этом уровень развиваемой пиковой мощности достигает единиц и десятков тераватт, а производимый генератором ток в 10...1000 раз превышает ток, порождаемый типовым разрядом молнии.
Устройство и принцип действия генератора иллюстрируется рис. 64. Генератор состоит из ротора и статора. В представленном варианте генератора коаксиального типа в качестве ротора используется цилиндрическая медная трубка, заполненная взрывчатым веществом. Статор генератора формируется спиралью из прочного (обычно медного) провода, окружающей ротор. В целях оптимизации электромагнитной индукции в роторе статорная обмотка иногда делится, на секции.
Первоначальное магнитное поле в генераторе, предшествующее взрыву, формируется стартовым током статора. При этом может использоваться любой внешний источник, способный обеспечить импульс электрического тока силой от единиц килоампер до мегаампер.
Во избежание преждевременного разрушения генератора поверх статорной обмотки устанавливается кожух из немагнитного материала (обычно цемента или стекловолокна совместно с эпоксидной смолой).
а
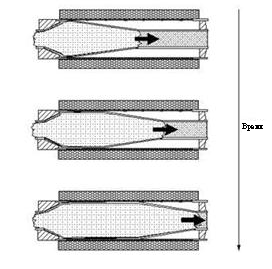
б
Рис. 64. Схема устройства генератора с взрывным сжатием магнитного поля
Подрыв взрывчатого вещества происходит с помощью специального генератора в момент, когда ток в статорной обмотке достигает максимума. Образующийся при этом плоский однородный фронт взрывной волны распространяется вдоль взрывчатого вещества, деформируя структуру ротора, превращая ее из цилиндрической в коническую форму. В момент расширения трубки ротора до размеров статора происходит короткое замыкание статорной обмотки, приводящее к эффекту сжатия магнитного поля генератора и возникновению мощного импульса тока величиной порядка нескольких десятков мегампер. Степень возрастания выходного тока по сравнению со стартовым током зависит от конструкции генератора и может достигать нескольких десятков.
Другим типом источника низкочастотной электромагнитной энергии большой мощности является магнитогидродинамический генератор (МГД), приводимый в действие с помощью ракетного топлива или взрывчатки. Основой работы данного генератора является возникновение тока в проводнике, движущемся в магнитном поле. Только в качестве проводника используется плазма, состоящая из ионизированного взрывчатого вещества или газообразного топлива, движущаяся сквозь магнитное поле.
Однако данный тип генератора к настоящему времени меньше проработан, чем генератор с взрывным сжатием магнитного поля, и потому имеет пока меньшие перспективы широкого применения в боевых электромагнитных средствах.
Реализация низкочастотного электромагнитного оружия в эффективном варианте требует больших антенн, поскольку ее максимальная излучаемая мощность лежит в диапазоне частот ниже 1 МГц. Решением этой проблемы может быть применение катушек с намотанными на них кабелями, выбрасываемыми в момент взрыва электромагнитной бомбы, или достаточно точная доставка боевого средства к месту расположения подавляемого объекта. В последнем случае наводка электромагнитного импульса на радиоэлектронные устройства объекта может осуществляться непосредственно за счет обмотки электромагнитного генератора и будет тем сильней, чем ближе к объекту располагается этот генератор.
7.6. Техника реализации СВЧ-энергии высокой мощности [3]. В качестве генератора СВЧ-излучения могут использоваться различные электронные приборы, начиная от широко известных магнетронов и клистронов и кончая новыми приборами — генератором с виртуальным катодом (зиркатором), гиротроном, лазером на свободных электронах и плазменным лучевым генератором. Все эти приборы обладают способностью преобразовывать кинетическую энергию электронного пучка в электромагнитную энергию СВЧ-диапазона.
Существующие лабораторные источники мощности СВЧ-излучения способны работать как в импульсном (длительностью 10 нс и более), так и в непрерывном режимах и перекрывать диапазон от 500 МГц до десятков ГГц при частотах повторения от единиц до тысяч импульсов в секунду. Максимальная генерируемая при этом мощность достигает уровня нескольких мегаватт (при непрерывном режиме) и нескольких гигаватт (при импульсном режиме). Разумеется, различные типы генераторов в пределах указанных параметров не являются одинаковыми. Так, гиротроны работают в миллиметровом диапазоне волн с высоким КПД, а варакторы – в сантиметровом диапазоне и имеют меньший КПД. Для тактического СВЧ-оружия крайне важно, чтобы генераторы были или достаточно широкополосными, или перестраивались в пределах декады. Наибольшей широкополосностью обладают плазменно-лучевые приборы, а легче всего перестраиваются по частоте – виркаторы. На рис. 65 показана схема виркатора с соосным виртуальным катодом. По своей конструкции этот виркатор представляет собой круглый волновод, переходящий в конус. Катод представляет собой металлический цилиндрический стержень диаметром несколько сантиметров, анодом является натянутая на обод металлическая сетка. При подаче на анод положительного потенциала порядка 105... 106 В вследствие взрывной эмиссии с катода поток электронов устремляется к аноду и проходит через него в пространство за анодом, где тормозится собственным кулоновым полем и отражается обратно к аноду, образуя виртуальный катод на расстоянии от анода, примерно равном расстоянию от него до реального катода. Отраженные электроны проходят сквозь сетку анода и вновь тормозятся у поверхности реального катода. В результате формируется облако электронов, осциллирующее у анода в потенциальной яме между виртуальным и реальным катодами. На частоте колебаний облака электронов возбуждается СВЧ-поле, которое излучается в пространство через диэлектрическое окно.
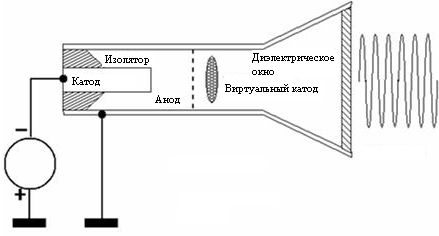
Рис. 65. Схема виркатора с соосным виртуальным катодом
Стартовые токи в виркаторах, при которых возникает генерация, составляют 1... 10 кА, а выводимая СВЧ-мощность достигает единиц гигаватт.
Особенности физических процессов, возникающих в виркаторах, делают их наиболее приемлемыми для генерации импульсов наносекундной длительности в длинноволновой части сантиметрового диапазона. Экспериментально от виркаторов получены уровни мощности от 170 кВт до 40 ГВт в сантиметровом и дециметровом диапазонах.
Недостатком виркаторов является низкий КПД, составляющий примерно 1 %, что обусловливается многомодовым характером генерируемого в них электромагнитного поля и интерференцией между модами. Преимущество высокочастотных устройств перед низкочастотными – возможность фокусирования генерируемой ими энергии в направлении цели с помощью достаточно компактных антенных систем с механическим или электронным управлением.
При необходимости поражения одновременно нескольких целей можно использовать ФАР, позволяющие быстро менять положение луча и формировать одновременно несколько лучей. Но при этом следует учитывать допустимые уровни электромагнитного излучения, на которых сказываются эффекты, связанные с электрическими пробоями в атмосфере. Ограниченная электрическая прочность воздуха устанавливает границу плотности потока СВЧ-энергии. Экспериментально установлено, что значение плотности потока СВЧ-энергии, при котором наступает диэлектрический пробой в воздухе, меняется с частотой, длительностью импульса, давлением воздуха и плотностью свободных электронов, с которой начинается лавинный процесс пробоя. При их наличии и нормальном атмосферном давлении пробой начинается при плотностях мощности 105...106 Вт/см2, если длительность импульса СВЧ-излучения больше наносекунды. Но для наступления пробоя, требуется время, необходимое для того, чтобы свободные электроны успели поглотить достаточное для начального пробоя количество СВЧ-энергии. В соответствии с этим фактором пробой наступает лишь в конце мощного СВЧ-импульса.
При выборе рабочей частоты СВЧ-излучения учитываются также условия распространения электромагнитных волн в атмосфере. Известно, что СВЧ-излучение поглощается в атмосфере водяным паром, молекулами кислорода и осадками. Пики резонансного поглощения водяным паром приходятся на частоты 22 и 185 ГГц, а для молекул кислорода – на частоты 60 и 118 ГГц. В пределах дальности действия тактического оружия (.1...100 км) и на малых высотах поглощение в диапазоне нескольких гигагерц на этих резонансных частотах может быть недопустимо большим. Поглощение осадками возрастает с частотой. Так, на частоте 3 ГГц излучение ослабляется на расстоянии 10 км при умеренном дожде на 0,01 дБ, но на частоте 30 ГГц при тех же условиях оно уже возрастает до 10 дБ.
Таким образом, выбор рабочей частоты излучения СВЧ-оружия зависит от требований дальности действия и всепогодности его применения.
7.7. Тактика применения электромагнитного оружия
Электромагнитное оружие может применяться как в стационарном, так и в мобильном вариантах [3].
При стационарном варианте облегчается выполнение массогабаритных и энергетических требований к аппаратуре, упрощается ее обслуживание. Но при этом требуется обеспечение высокой направленности электромагнитного излучения только в сторону цели во избежание поражения собственных радиоэлектронных устройств этим излучением. Это можно обеспечить только применением остронаправленных антенных систем. В случае реализации СВЧ-излучения использование остронаправленных антенн не составляет проблемы, чего нельзя сказать при реализации низкочастотного ЭМО.
В этом отношении мобильный вариант реализации ЭМО имеет ряд преимуществ. Прежде всего, легче решается проблема защиты собственных радиоэлектронных средств от воздействия ЭМО, поскольку боевое средство может быть доставлено непосредственно к месту расположения объекта, подлежащего воздействию, и только там приведено в действие. Удаленность цели от места расположения собственных радиоэлектронных средств будет гарантировать безопасность последних от губительного действия ЭМО.
Упрощаются проблемы с излучением электромагнитной энергии, поскольку в этом случае отпадает необходимость применения направленных антенных систем, а в ряде случаев вообще можно обойтись без них, ограничившись непосредственной электромагнитной связью, возникающей между генератором ЭМО и электронными устройствами противника в связи с их близким расположением друг к другу. Но при мобильном варианте, конечно, возникают и некоторые затруднения в удовлетворении массо-габаритных и энергетических требований к аппаратуре, но они вполне преодолеваются.
Средствами доставки ЭМО в мобильном варианте могут быть самолеты, вертолеты, ракеты, корабли. При этом предполагается наличие соответствующей информации о целях, подлежащих электромагнитному воздействию. В сборе такой информации важная роль отводится средствам РТР. Подавляющее большинство интересующих целей в процессе функционирования излучают радиоволны, обладающие определенными характеристиками, позволяющими не только их идентифицировать, но и устанавливать их местоположения с достаточной точностью. Это позволяет разрабатывать системы обнаружения, опознавания и пеленгации таких источников излучения в целях выведения на них боевых средств ЭМО.
При использовании самолетов (вертолетов) эффективным средством доставки ЭМО к цели является планирующая бомба. Ее можно запустить с дальности, превышающей дальность действия системы ПВО противника, что минимизирует риск поражения самолета средствами ПВО противника и риск повреждения бортовых радиоэлектронных устройств электромагнитным воздействием бомбы при ее взрыве.
При этом автопилот планирующей бомбы может быть запрограммирован так, что профиль полета бомбы к цели и высота ее подрыва будут оптимальными с точки зрения достигаемого эффекта применения ЭМО.
В настоящее время разработано снаряжение по точному наведению обычных и планирующих бомб с применением глобальной спутниковой навигационной системы. Для доставки средств ЭМО могут быть использованы также беспилотные летательные аппараты, оснащенные соответствующей аппаратурой обнаружения источников излучения и наведения на них средств ЭМО.
Электромагнитные боеголовки могут также доставляться к цели с помощью крылатых ракет, оснащенных аккумуляторными устройствами электроэнергии для обеспечения приведения в действие ЭМО. Момент срабатывания ЭМО тесно связан с определенными датчиками носителей. При размещении на крылатой ракете – с датчиком навигационной системы, при размещении в противокорабельной ракете – с радиолокационной головкой наведения, а при размещении на ракете «воздух-воздух» – непосредственно с системой взрывателя. Подрыв бомбы в воздухе может быть осуществлен с помощью радиолокационного высотомера, барометрического устройства или глобальной навигационной системы.
7.8. Защита от электромагнитного оружия
Наиболее эффективной защитой от ЭМО конечно является предотвращение его доставки путем физического уничтожения носителей, как и при защите от ядерного оружия. Однако это не всегда достижимо и всегда будет иметь место прорыв отдельных носителей ЭМО через систему ПВО и ПРО, особенно при массовом применении средств ЭМО. Поэтому наряду со средствами перехвата и уничтожения носителей ЭМО следует прибегать к мерам электромагнитной защиты непосредственно самой радиоэлектронной аппаратуры.
К таким мерам прежде всего следует отнести полную экранировку самой аппаратуры, а также экранировку помещений, где эта аппаратура размещается. Это неизбежно приведет к снижению электромагнитных наводок и их поражающего действия на полупроводниковые элементы аппаратуры. Если помещение уподобится известной клетке Фарадея, предотвращающей проникновение внешнего электромагнитного поля, то защита аппаратуры от ЭМО будет полностью обеспечена.
Однако реально такая защита не может быть обеспечена, поскольку аппаратура нуждается в подводке питания извне и должна иметь каналы связи, по которым должна поступать информация и результаты обработки этой информации. Иными словами, защищаемая аппаратура не может по своим функциональным характеристикам полностью изолироваться от внешнего мира, и это усугубляет проблему ее защиты от ЭМО. Наряду с экранировкой помещений и самой аппаратуры необходимо обеспечивать также защиту всех внешних связей аппаратуры от проникновения через них к аппаратуре электромагнитного воздействия. Такой защитой являются фильтры. Но они обычно защищают только в определенной полосе частот и соответствующим образом настраиваются. Учитывая широкополосность электромагнитных излучений, создаваемых ЭМО, обеспечить полную и надежную защиту с помощью фильтров вряд ли возможно. Хорошей защитой от электромагнитных наводок по проводам, идущим к аппаратуре, является замена их на волоконно-оптические каналы. Но это неприменимо к цепям электропитания.
Проблема защиты от ЭМО усугубляется и тем, что развитие современной информационной системы идет по пути дезинтеграции. Вместо больших центров по приему и обработке информации предпочитают иметь в каждом учреждении свои компьютерные системы, которые в целях оперативного взаимообмена информацией соединяются соответствующими каналами связи, используя при этом часто глобальную информационную систему Интернет. Такая децентрализация радиоэлектронной аппаратуры и взаимосвязи является основным фактором уязвимости радиоэлектронных средств по отношению к ЭМО, в результате чего применение ЭМО в военных конфликтах становится еще более перспективным.
Литература
Голубева, Н.С. Основы радиоэлектроники сверхвысоких частот: Учебное пособие / Н.С. Голубева, В.Н. Митрохин; Под общ. ред. проф. д.т.н. И.Б. Федоров. - М.: МГТУ им. Баумана, 2008. - 488 c.
Горохов, П.К. Толковый словарь по радиоэлектронике / П.К. Горохов. - М.: Русский язык, 1993.
Евстратов, В.А. Радиоэлектроника прогулочных судов / В.А. Евстратов. - М.: ТрансЛит, 2008. - 128 c.
Манаев, Е.И. Основы радиоэлектроники / Е.И. Манаев. - М.: ЛИБРОКОМ, 2013. - 512 c.
Воронков Э.Н.: Твердотельная электроника. - М.: Академия, 2010
Гагарина Л.Г.: Технические средства информатизации. - М.: ФОРУМ, 2010
Галушкин А.И.: Нейронные сети. - М.: Горячая линия-Телеком, 2010
Гашков С.Б.: Криптографические методы защиты информации. - М.: Академия, 2010
Гладких В.В.: Идеи и решения фундаментальных проблем науки и техники. - СПб.: БХВ-Петербург, 2010
Глухих И.Н.: Интеллектуальные информационные системы. - М.: Академия, 2010
Голенищев Э.П.: Информационное обеспечение систем управления. - Ростов н/Д: Феникс, 2010
Государственное конструкторское бюро Аппаратно-программных систем "Связь" ; [гл. ред. Н.Г. Пархоменко]: Радиоконтроль. - Ростов н/Д: ФГУ Связь, 2010
Гуртов В.А.: Зарядоперенос в структурах с диэлектрическими слоями. - Петрозаводск: ПетрГУ, 2010
Дегтярев В.М.: Компьютерная геометрия и графика. - М.: Академия, 2010
Денисенко А.Н.: Компьютерная обработка информации. - М.: МЕДПРАКТИКА-М, 2010
Дрейзин В.Э.: Управление качеством электронных средств. - М.: Академия, 2010
Елизаров А.М.: Веб-технологии для математика: основы MathML . - М.: ФИЗМАТЛИТ, 2010
Иванов А.А.: Синхронизация в системе цифрового телевидения. - М.: МГТУ им. Н.Э. Баумана, 2010
Институт СВЧ полупроводниковой электроники РАН: Наногетероструктуры в сверхвысокочастотной полупроводниковой электронике. - М.: Техносфера, 2010
Ицкохи Я.С.: Импульсные устройства. - М.: Дрофа, 2010
Калёнова В.И.: Линейные нестационарные системы и их приложения к задачам механики. - М.: ФИЗМАТЛИТ, 2010
Коваленко А.А.: Основы микроэлектроники. - М.: Академия, 2010
Комаров И.М.: Информационная защита нанотехнологий и объектов. - Белгород: БелГУ, 2010
Кузнецов М.В.: PHP 5/6. - СПб.: БХВ-Петербург, 2010
Кузовкин А.В.: Управление данными. - М.: Академия, 2010
Л.К. Бабенко и др. : Защита данных геоинформационных систем. - М.: Гелиос АРВ, 2010
Лаврентьев Б.Ф.: Схемотехника электронных средств. - М.: Академия, 2010
Лацис А.О.: Параллельная обработка данных. - М.: Академия, 2010
Линев А.В.: Технологии параллельного программирования для процессоров новых архитектур. - М.: Московский университет, 2010
Максимов Н.В.: Архитектура ЭВМ и вычислительных систем. - М.: Форум, 2010
Морева О.Н.: Документные фонды библиотек и информационных служб. - СПб.: Профессия, 2010
Назаров А.Н.: Модели и методы расчёта показателей качества функционирования узлового оборудования и структурно-сетевых параметров сетей связи следующего поколения. - Красноярск: Поликом, 2010
Нефёдов Е.И.: Распространение радиоволн и антенно-фидерные устройства. - М.: Академия, 2010
Нижегородский гос. ун-т им. Н.И. Лобачевского ; К.В. Корняков и др. ; под ред. В.П. Гергеля Нижегородский гос. ун-т им. Н.И. Лобачевского: Инструменты паралельного программирования в системах с общей памятью. - М.: Московский университет, 2010
PAGE \* MERGEFORMAT1
ОСНОВЫ ТЕОРИИ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ