Оптимальное управление в электрических схемах
Федеральное агентство по образованию ФГБОУ ВПО
«Саратовский государственный технический университет имени Гагарина Ю.А.»
Кафедра «Техническая кибернетика и информатика»
Пояснительная записка к курсовой работе
по дисциплине
“ Основы теории оптимального управления ”
на тему:
«Оптимальное управление в электрических схемах»
Выполнил:
студент группы УИТ-31
Егоров М. Ю.
Проверила:
Торгашова О. Ю.
Саратов 2012
Задание на курсовую работу
Задача 1
Оптимальное управление в RL-цепи
Для электрической схемы содержащей источник питания e(t), активные сопротивления r, R и индуктивность L
необходимо :
а) определить оптимальный закон изменения напряжения ис�точника питания e(t), приводящий к изменению тока через сопроти�вление R и индуктивность L в схеме от заданного начального значе�ния i(t0)=i0 до заданного конечного значения i(t1)=i1 , такой, чтобы суммарная энергия активных потерь (затрачиваемая на нагрев) при этом изменении была минимальной;
б) определить оптимальный закон изменения тока i(t) , соот�ветствующий оптимальному закону изменения e(t);
в) вычислить энергию активных потерь в схеме при оптималь�ном режиме изменения напряжения и тока ( e(t), i(t) ) и сравнить ее с энергией активных потерь, затрачиваемой на нагрев при линейном изменении тока в схеме от начального до конечного значения;
г) построить графики оптимальных и линейных изменений ЭДС и токов.
Значения параметров элементов схемы в зависимости от ва�рианта задания приведены в таблице 1.
Таблица 1
|
Номер варианта
|
r
[Ом]
|
R
[Ом]
|
L
[Г ]
|
i(t0)
[А]
|
i(t1)
[А]
|
|
7
|
6,5
|
65
|
0,018
|
0,25
|
0,8
|
Полагать t0=0 , t1=10-3 c .
Реферат
Цель работы: систематизация, закрепление и расширение теоретических знаний, и получение практических навыков при расширении конкретных технических задач, развитие навыков самостоятельной работы с технической литературой в ходе расчета.
Объект исследования: в курсовой работе предлагается разработать алгоритмы изменения режима работы электрической схемы, содержащей ак�тивные и реактивные элементы, обеспечивающие минимизацию энергии ак�тивных потерь при переходе от одного режима работы схемы к дру�гому. Необходимо определить вид закона изменения ЭДС источника питания (управляющего воздействия) и проанализировать работу схемы при действии этой ЭДС.
Введение
На протяжении долгих лет очень эффективно используются математические методы моделирования и изучения жизни. Самые различные специалисты вынуждены прибегать к математическим методам оптимального управления. В связи с этим возникает множество проблем и трудностей, которые приходится решать.
Курсовая работа имеет своей целью систематизацию, закрепление и расширение теоретических знаний и практических навыков путем решения конкретных технических задач, развитие навыков само�стоятельной работы с литературой в ходе расчетов.
В процессе выполнения курсовой работы разрабатываются алгоритмы изменения режима работы электрической схемы, содержащей ак�тивные и реактивные элементы, которые обеспечивают минимизацию энергии ак�тивных потерь при переходе от одного режима работы схемы к дру�гому. Также определяется вид закона изменения ЭДС источника питания (управляющего воздействия) и анализируется работа схемы при действии этой ЭДС.
- Задача 1
Оптимальное управление в RL-цепи
Описание объекта управления
Математическая модель объекта получается на основе законов Кирхгофа:
и имеет вид диф�ференциального уравнения
, (1)
где x(t)=i(t) , u(t)=e(t) ,p, b – числа, равные p = – R/L, b = 1/L
1.2. Конструирование функционала – критерия оптимальности.
Критерий оптимальности – квадратичный функционал
где - симметричная, неотрицательно-определенная матрица чисел, размерами ; - симметричная, положительно-определенная матрица чисел размерами .
В данном случае вместо матриц используются числа, поэтому критерий оптимальности будет иметь другой вид:
, (2)
Это выражение представляет собой суммарную энергию активных потерь в схеме за время t1–t0.
Запишем выражение для активной мощности по�терь на сопротивлениях r и R :
или ,
Таким образом, q = R=65, m = 1/r =1/6,5 =0,154, n = 0.
1.3. Формулировка задачи как вариационной задачи на услов�ный экстремум.
Для этого необходимо рассматривать в качестве уравнения связей уравнение системы (1), а в качестве функционала – функционал (2).
Таким образом, получаем следующую вариационную задачу:
Определить функции x(t) и u(t) доставляющие экстремум функционалу
,
при граничных условиях
,
и при дополнительном условии (уравнении связи)
накладываемом на функции x(t), u(t) , в классе которых ищется экстремум.
1.4. Синтез оптимального алгоритма управления.
1.4.1. Получение уравнений вариационной задачи.
Введем вспомогательную функцию (функцию Лагранжа)
где - пока неизвестная функция называемая неопределенным множителем Лагранжа.
Рассматриваемая задача называется задачей Лагранжа.
(t) – неопределенный множитель Лагранжа, – функция Лагранжа.
Запишем уравнения Эйлера для функции (они называются уравнениями Эйлера – Лагранжа)
Решим совместно уравнения Эйлера – Лагранжа и уравнение связи. Это система трех уравнений для определения трех неизвестных x(t), u(t), (t).
В итоге получаем систему уравнений
(3)
(4)
(5)
Здесь (3), (4) – уравнения Эйлера – Лагранжа. К этим уравнениям добавлено уравнение объекта (5) (уравнение связи).
1.4.2. Отыскание решения уравнений вариационной задачи.
Уравнения (3) – (5) решаются в следующем порядке:
1) Выразим u(t) из (4):
Затем подставим его в (5).
При этом получается система уравнений
, (6)
с коэффициентами
a11 = p – nb/2m = - 3611,1 ,
a12 = b2/2m = 7221,5,
a21 = 2q – n2/2m =130,
a22 = nb/2m – p = 3611,1.
Получим систему уравнений:
2) Запишем систему (6) в матричной форме
, (7)
где
,
.
3) Запишем решение уравнения (7) в соответствии с формулой Коши в виде:
, (8)
где
– вектор начальных условий, а матричная экспонента определяется по формуле Лагранжа – Сильвестра
,
где 1 , 2 – собственные числа матрицы А. Е - единичная матрица.
Найдем собственные числа матрицы А из условия. Получим:
,
,
.
Из системы следует, что для нахождения и необходимо знать начальные значения и .
(начальное положение объекта) задано, неизвестно.
Для определения неизвестного начального значения множителя Лагранжа (t0), входящего в (8) необходимо:
а) запишем (8) для момента времени t1
или
,
, ---- (9)
где e11 , е12 , е21 , е22 – элементы матрицы (числа):
б) определим (t0) из первого уравнения системы (9)
Получили, что
Решаем уравнение (7):
4) Решив уравнение (7), запишем выражения для оптимальной траектории и оптимального управления:
- оптимальная траектория
- оптимальное управление
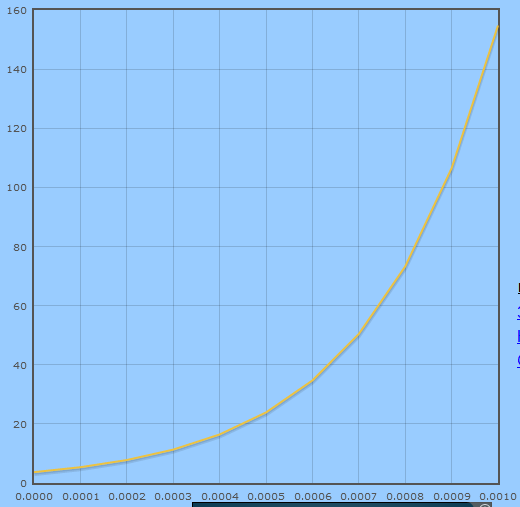
1.5. Анализ процессов в системе.
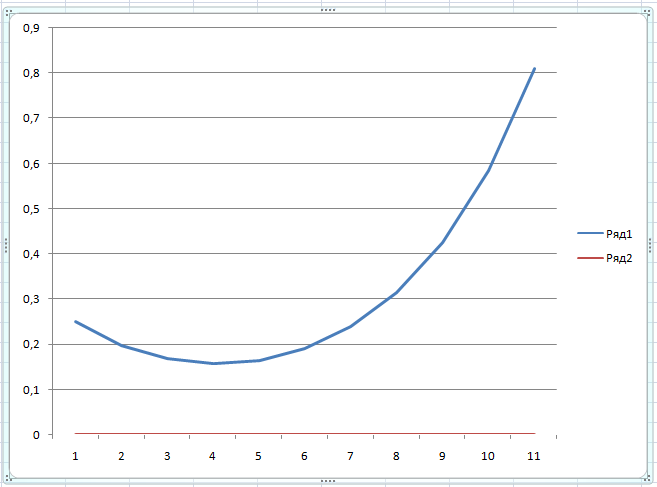
- Анализ процессов при оптимальном режиме
Анализ процессов при оптимальном режиме построим графики x(t) , u(t) на интервале t[t0,t1]. Этот интервал разбивается на 10 частей и вычисляются значения x(t) и u(t) в этих точках.
|
t
|
x(t)
|
u(t)
|
|
0
|
0,25
|
3,66895
|
|
0,0001
|
0,197785
|
5,340788
|
|
0,0002
|
0,168094
|
7,767944
|
|
0,0003
|
0,157546
|
11,29368
|
|
0,0004
|
0,16494
|
16,41661
|
|
0,0005
|
0,191117
|
23,86126
|
|
0,0006
|
0,23906
|
34,68048
|
|
0,0007
|
0,314226
|
50,40436
|
|
0,0008
|
0,425178
|
73,25666
|
|
0,0009
|
0,58455
|
106,4692
|
|
0,001
|
0,810491
|
154,7392
|
-
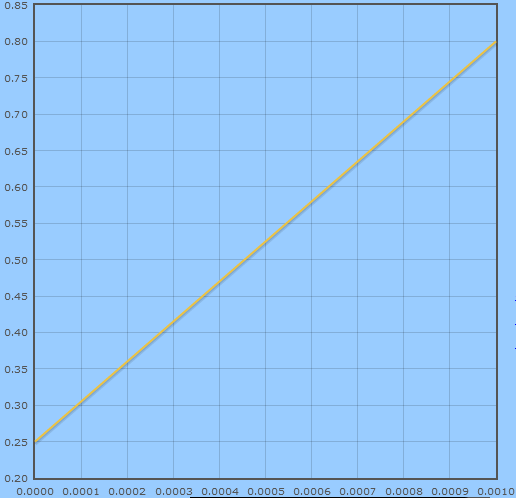
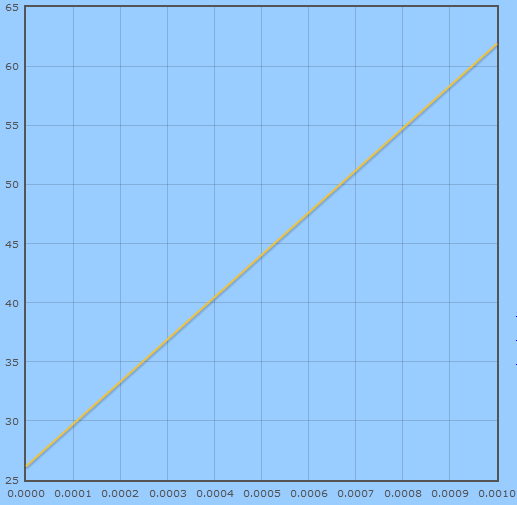
Анализ процессов при линейном изменении тока i(t)
Полагая, что ток изменяется линейно от заданного начального состояния до заданного конечного состояния
xЛ(t) = kt + d ( iЛ(t) = kt + d),
(величины k , d найдем из условия прохождения iЛ(t) и uЛ(t) через заданные начальное и конечное значения)
xЛ(0) = d=0,25 , xЛ(0.001) = 0.001k + 0,25 = 0,8
k=550
xЛ(t) = 550t + 0,25
запишем на основе (1)
выражение для закона управления uЛ(t) , обеспечивающее такое линейное изменение
.
По полученным данным построим графики процессов xЛ(t), uЛ(t).
|
t
|
xл(t)
|
uл(t)
|
|
0
|
0,25
|
26,15
|
|
0,0001
|
0,305
|
29,725
|
|
0,0002
|
0,36
|
33,3
|
|
0,0003
|
0,415
|
36,875
|
|
0,0004
|
0,47
|
40,45
|
|
0,0005
|
0,525
|
44,025
|
|
0,0006
|
0,58
|
47,6
|
|
0,0007
|
0,635
|
51,175
|
|
0,0008
|
0,69
|
54,75
|
|
0,0009
|
0,745
|
58,325
|
|
0,001
|
0,8
|
61,9
|
x(t)
xл(t)
u(t)
uл(t)
1.6. Сравнительная оценка процессов в схеме при оптимальном и линейном режимах.
1.6.1. Вычислим энергию активных потерь при оптимальном режиме, подставив в (2) x(t) и u(t).
1.6.2. Вычислим энергию активных потерь при линейном режиме путем подстановки в (2) xЛ(t) и uЛ(t).
1.6.3. Сравнивая полученные величины, делаем вывод, что суммарная энергия активных потерь (затрачиваемая на нагрев) при линейном режиме больше, что говорит о целесообразности работы схемы в оптимальном режиме.
Часть 2
ВАРИАНТ 4

Рис. 4
Для электрической схемы, содержащей источники ЭДС e(t) и источник тока J(t), активные сопротивления R1, R2, R3, индуктивность L и емкость С (рис. 4), необходимо:
а) определить оптимальные законы изменения напряжения источника питания e0(t) и источника тока J0(t), приводящих к изменению тока через индуктивность L в схеме от заданного начального значения iL0 до заданного конечного значения iL1, и изменению напряжения на обкладках конденсатора С в схеме от заданного начального значения uC0 до заданного конечного значения uC1 так, чтобы суммарная энергия активных потерь (затрачиваемая на нагрев) при этом изменении была минимальной;
б) определить оптимальные законы изменения тока i0L(t) и напряжения на обкладках конденсатора u0C(t), соот�ветствующие оптимальным законам изменения e0(t), J0(t);
в) вычислить энергию активных потерь в схеме при оптималь�ном режиме изменения напряжений источников питания, тока и напряжения на обкладках конденсатора (e0(t), J0(t), i0L(t), u0C(t)) и сравнить ее с энергией активных потерь, затрачиваемой на нагрев при линейных изменениях тока iЛL(t) и напряжения на обкладках конденсатора uЛC(t) в схеме от начальных значений до конечных;
г) построить графики оптимальных и линейных изменений ЭДС, источника тока, тока и напряжения на обкладках конденсатора.
Значения параметров элементов схемы:
|
№
зад.
|
R1,
Ом
|
R2,
Ом
|
R3,
Ом
|
L,
Гн
|
С,
мкФ
|
iL0,
А
|
iL1,
А
|
uC0,
В
|
uC1,
В
|
|
17
|
70
|
67
|
85
|
0,022
|
6,5
|
0,2
|
0,7
|
40
|
70
|
Полагать t0=0 , t1=10-3 c .
Описание объекта управления
Математическая модель объекта получается на основе законов Кирхгофа и имеет вид линейных дифференциальных уравнений, векторно-матричный вид которых
,
где – матрицы чисел размерами и соответственно.
Начальное положение (состояние) объекта:.
Конечное положение (состояние) объекта: .
Уравнения электрической схемы можно получить в виде:
, (1)
. (2)
Эти уравнения записаны в форме Коши.
Введем обозначения:
,.
Тогда выражения (1), (2) можно записать в виде:
(3)
Уравнения для выходных переменных
, . (4)
Объединяя (3) и (4), получаем математическую модель электрической схемы:
(5)
При Ф, Гн, [1/Ом], Ом соответствующие матрицы получают следующие численные значения:
.
4.2. Конструирование функционала (критерия оптимальности).
Находится выражение для суммарной энергии активных потерь в схеме за время t1–t0 , которое в общем виде можно представить в виде квадратичного функционала
(4.4)
где – симметричная неотрицательно-определенная матрица чисел размерами ; – симметричная положительно-определенная матрица чисел размерами .
Решение:
Формулировка задачи как вариационной задачи на условный экстремум.
Для этого необходимо рассматривать в качестве уравнения связей уравнение системы (1), а в качестве функционала – функционал (2).
Таким образом, получаем следующую вариационную задачу:
Определить функции x(t) и u(t) доставляющие экстремум функционалу
,
при граничных условиях
,
и при дополнительных условиях (уравнениях связи)
накладываемом на функции x(t), u(t) , в классе которых ищется экстремум.
Синтез алгоритма оптимального управления – решение вариационной задачи на условный экстремум.
Составляется функция Лагранжа:
.
Записываются уравнения Эйлера-Лагранжа:
(7)
Вычисляются составляющие соотношений (5.6):
;
;
.
Тогда уравнения Эйлера-Лагранжа принимают вид:
(8)
К последним уравнениям добавляется уравнение связи (уравнение объекта) получается следующая система уравнений:
(9)
(10)
Найдем U:
и подставим в первые два уравнения (10):
(11)
Введем вектор . Тогда систему (10) с учетом (11) можно представить в виде:
(12)
где Р – блочная матрица, имеющая вид:
(13)
Решение (12) в соответствии с формулой Коши:
(14)
Вычислив , ее можно представить следующим образом:
(15)
где - функциональные матрицы размеров .
Тогда из выражений (14), (15):
(16)
Для определения начального значения множителя Лагранжа запишем следующие соотношения:
(17)
Из первого уравнения (17) можно определить начальное условие множителя Лагранжа:
(18)
Теперь можно записать из выражений (16):
(19)
Оптимальное управление определится выражением:
Таким образом найдены соотношения для оптимальной траектории и оптимального управления:
Анализ процессов в системе
Анализ процессов при оптимальном режиме
Анализ процессов при оптимальном режиме построим графики X(t) , U(t) на интервале t[t0,t1]. Этот интервал разбивается на 1000 частей и вычисляются значения x(t) и u(t) в этих точках.
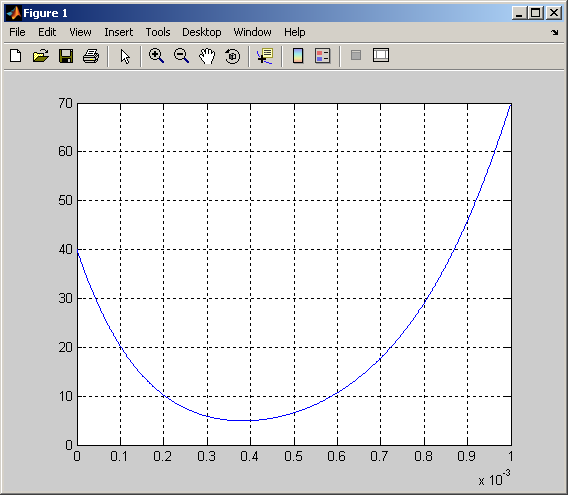
Рис. 1. График оптимального изменения напряжения uC(t)
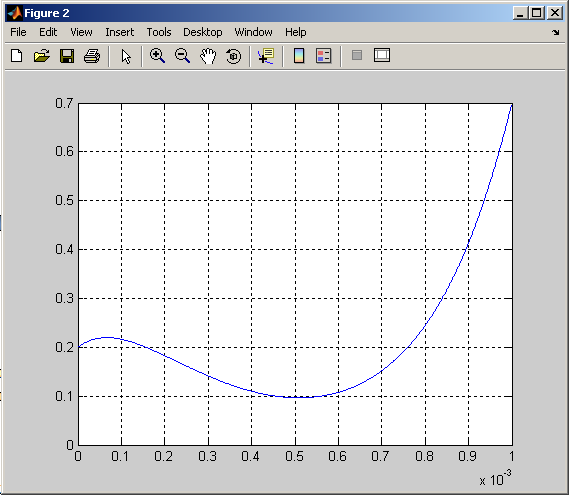
Рис. 2. График оптимального изменения тока i2(t)
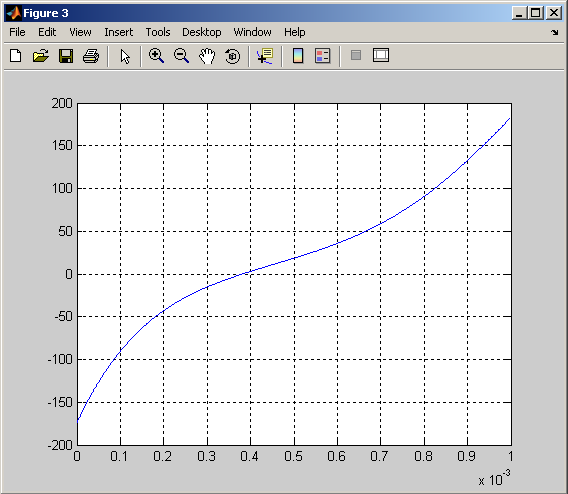
Рис. 3. График оптимального изменения источника тока I(t)
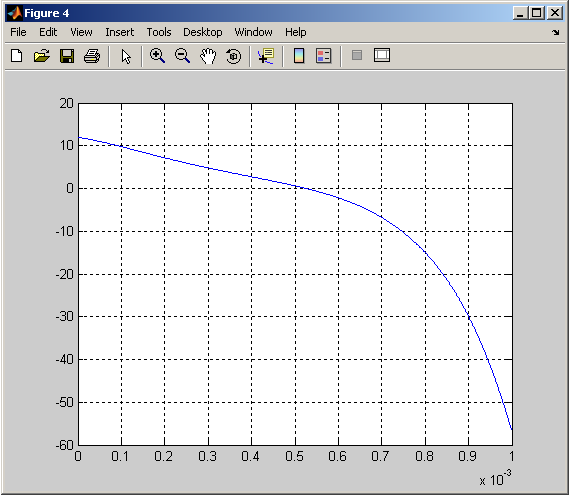
Рис. 4. График оптимального изменения ЭДС e1(t)
Анализ процессов при линейном режиме
Полагая, что ток и напряжения изменяются линейно от заданного начального состояния до заданного конечного состояния
xЛ(t) = kt + d
(величины k , d найдем из условия прохождения iЛ(t) и uЛ(t) через заданные начальное и конечное значения)
xЛ1(0.001) = 0.001k + 40 = 70, k1=30000, xЛ1(t) =30000t + 40
xЛ2(0.001) = 0.001k + 0.2 = 0.7, k2=500, xЛ2(t) =500t + 0.2
Запишем на основе (11)
По полученным данным построим графики процессов XЛ(t), UЛ(t).
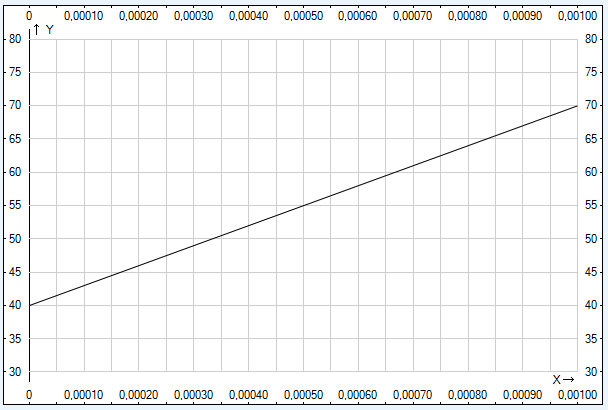
Рис. 6. График линейного изменения напряжения uC(t)
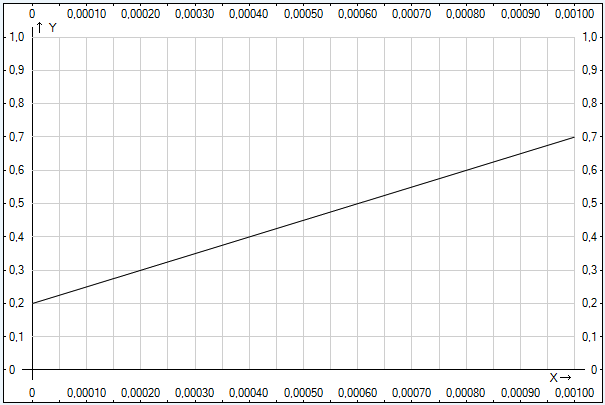
Рис. 7. График линейного изменения тока iL(t)
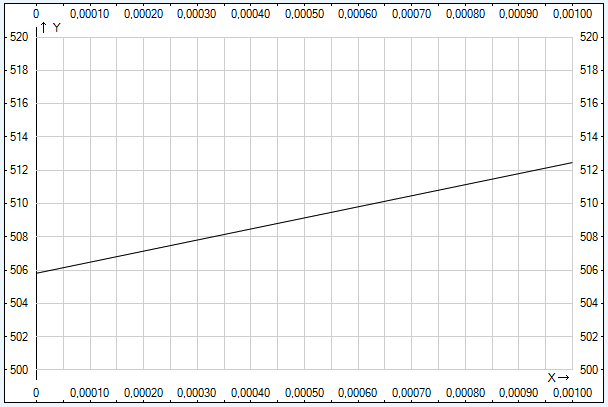
Рис. 8. График линейного изменения источника тока I(t)
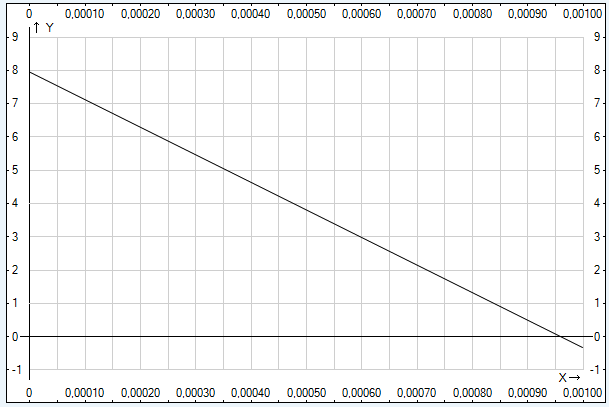
Рис. 9. График линейного изменения ЭДС e(t)
Сравнительная оценка процессов в схеме при оптимальном и линейном режимах
Вычислим энергию активных потерь при оптимальном режиме
Вычислим энергию активных потерь при линейном режиме путем подстановки в (2) xЛ(t) и uЛ(t).
Сравнивая полученные величины, делаем вывод, что суммарная энергия активных потерь (затрачиваемая на нагрев) при линейном режиме больше, что говорит о целесообразности работы схемы в оптимальном режиме.
Заключение
В процессе выполнения курсовой работы были разработаны алгоритмы изменения режима работы электрической схемы, содержащей ак�тивные и реактивные элементы, которые обеспечивают минимизацию энергии ак�тивных потерь при переходе от одного режима работы схемы к дру�гому. Также был определен вид закона изменения ЭДС источника питания (управляющего воздействия) и была проанализирована работа схемы при действии этой ЭДС.
e(t)
L
R
i(t)
Оптимальное управление в электрических схемах