Моделювання динамічних режимів роботи електропривода на ЕОМ
|
Вступ ………………………………………………………………………….. |
|
|
Розділ 1 Характеристика електромеханічної системи, вибір електрообладнання та розрахунок характеристик розімкненої та замкненої системи привода технологічного механізму……………………. |
|
|
1.1. Основні типи електровозів та межі їх застосування |
|
|
1.2. Система живлення контактного електровозного транспорту |
|
|
1.3. Технічні данні електровоза К14 |
|
|
1.4. Характеристика та технічні дані на тяговий ЕП |
|
|
1.5. Порівняльний аналіз систем пуску та регулювання швидкості тягового привода |
|
|
1.6. Розрахунок та побудова швидкісних і механічних характеристик електропривода |
|
|
1.7. Енергетичні показники привода на базі широтно-імпульсного перетворювача |
|
|
Розділ 2 Обґрунтування і розробка системи керування електроприводом. |
|
|
2.1 Електрична принципова схема силових ланцюгів імпульсного перетворювача |
|
|
2.2 Характеристика тягових двигунів |
|
|
2.3 Вибір широко-імпульсного перетворювача |
|
|
2.4 Вибір реверсивного широко-імпульсного перетворювача постійної напруги. |
|
|
Розділ 3 Моделювання динамічних режимів роботи електропривода на ЕОМ…………………………………………………………………………… |
|
|
3.1 Моделювання статичних та динамічних режимів розімкненої системи електропривода |
|
|
3.2 Розрахунок перехідних процесів у реостатній системі |
|
|
3.3 Розрахунок перехідних процесів у системі ШІП-Д |
|
|
Висновки ……………………………………………………………………. |
|
|
Список використаних джерел……………………………………………... |
Вступ
Переміщення гірничих порід та корисних копалин є одним із головних виробничих процесів гірничодобувних підприємств. Цим пояснюється та особлива роль, що належить рудничному транспорту в гірничодобувній справі. Надійна, чітка та безперебійна робота транспорту в значній мірі підвищує використання основних механізмів, сприяє зниженню собівартості продукції та являється обов’язковою умовою виконання виробничої програми кожного гірничого підприємства.
Одною із найважливіших складових частин транспорту є електровозна відкатка. У порівнянні з іншими видами механізованого рудничного транспорту (канатна відкатка, конвеєрний транспорт) вона в більшій кількості випадків найбільш економічна та результативна.
Вона складається частіше всього із наступних основних елементів: подвижного составу (електровоз і вагони); джерела електричної енергії – як правило, електричної підстанції (тягової або зарядної); електричної мережі (живлячі проводи та рейковий шлях).
Головну роль в системі підземної електровозної відкатки відіграє електровоз.
За родом живлячого струму розрізняють електровози постійного та змінного струму. Останні можуть бути однофазнопостійного струму, з випрямлячами на електровозі, або однофазного струму, з двигунами змінного струму. Електровози змінного струму використовуються тільки на відкритих гірничих виробках. У підземних умовах електровози змінного струму використовувати недоцільно в результаті великих втрат напруги в мережі, так як опір контактної мережі змінному струму значно більше, ніж постійному, а величина напруги обмежена умовами безпеки.
Рудничні електровози класифікуються також наступним чином:
- за способом живлення – з автономним джерелом живлення (акумуляторні); із зовнішнім джерелом живлення (контактні та високочастотні); комбіновані (контактно-кабельні та контактно-акумуляторні);
- за призначенням – магістральні або відкаточні (для відкатки по головним виробкам), маневрово-зборочні (для маневрових та допоміжних робіт по околоствольним, вентиляційним та іншим виробкам шахт);
- за тяговою категорією – легкі або малогабаритні зі зчіпною масою від 2 до 5 т; середні – від 6 до 10 т і важкі – більше 10 т;
- за рівнем вибухобезпеки – рудничного нормального (РН); рудничного підвищеної надійності проти вибуху (РП) і рудничного вибухобезпечного (РВ) виконання.
Окрім цього, рудничні електровози поділяються: за конструкцією ходової частини, типу привода колісних пар, способу управління, способу гальмування, розташуванню кабіни машиніста, ширині колії, конструкції рами й т.д.
Розділ 1
Характеристика електромеханічної системи, вибір електрообладнання та розрахунок характеристик розімкненої та замкненої системи привода технологічного механізму
1.1. Основні типи електровозів та межі їх застосування
В наш час на вугільних і рудничних шахтах використовуються два основні види рудничних (шахтних) електровозів: контактні та акумуляторні.
Рисунок 1 - Принципові схеми відкатки контактними (а) і акумуляторними (б) електровозами
У комплекс відкатки контактними електровозами (рис. 1.1, а) входять:
тягова підстанція з трансформатором 1 та перетворювальним агрегатом 2, повітряний контактний провід 4, електровоз 3 з тяговим двигуном 5 і токоприймачем 7, рейковий шлях 6. Електровози отримують живлення постійним струмом напругою 250 або 550 В від контактного проводу через токоприймачі. У контактну мережу електроенергія надходить по живлячим кабелям від тягової підстанції, перетворюючої трьохфазний змінний струм рудничної мережі в постійний. Роль зворотного проводу виконують рельсовий шлях та відсмоктуючі кабелі.
Комплекс відкатки акумуляторними електровозами (рис. 1, б) включає в себе зарядну підстанцію, на якій установлені трансформатор 1, зарядний агрегат 2, зарядний стіл 9 із заряджаємою акумуляторною батареєю 8. Друга акумуляторна батарея знаходиться на електровозі 3. Інші позначення такі ж, як на рис. 1.1, а. Електровози живляться постійним струмом від батареї, встановленої на електровозі. Зарядку та заміну акумуляторних батарей виконують в камерах зарядних підстанцій.
У порівнянні з акумуляторними контактні електровози простіші за конструкцією та дешевші; вони більш зручні та економічні в експлуатації; мають більшу силу тяги та швидкість руху; менше використовують енергію. Однак, із-за створення іскри між контактним проводом і токоприймачами, між рельсами і колесами робить неможливим їх використання в небезпечних по газу та пилу вугільних шахтах, з урахуванням цього використання контактних електровозів у виконанні РН допускається у всіх виробках шахт, безпечних по газу та пилу, в основному в усіх рудних шахтах. Щодо вугільних шахт, то згідно з Правилами безпеки дозволяється використання контактних електровозів у виконанні РН у виробках із свіжою струєю 1 і 2 категорій по газу і небезпечних по пилу. Однак такі електровози повинні оснащуватися двома токоприймачами для зменшення іскроутворення.
В усіх виробках шахт, небезпечних по газу або пилу, повинні використовуватися електровози у виконанні РВ. При цьому у виробках з ісходящею струєю повітря і підготовчих виробках шахт 3 категорії, зверхкатегорних та небезпечних по миттєвим викидам метану електровози повинні оснащуватися переносними автоматичними приборами контролю вмісту метану в рудничній атмосфері.
Відкатка акумуляторними електровозами у виконанні РП допускається в усіх відкаточних виробках шахт 1 і 2 категорій по газу або небезпечних по пилу, а також у відкаточних виробках зі свіжою струєю повітря шахт 3 категорії та зверхкатегорійних по газу.
В виробках зі свіжою струєю повітря на пластах, небезпечних по миттєвим викидам вугілля й суфлярних виділень, повинні використовуватися електровози у виконанні РВ, а використання електровозів у виконанні РП допускається ненадовго лише при умові підходу їх до очищуючих забоїв на відстань не ближче 50 м.
В виробках з ісходящим струменем повітря і в підготовчих виробках, провітрюємих вентиляторами місцевого провітрювання, шахт 3 категорії і зверхкатегорних також повинні використовуватися електровози у виконанні РВ. При цьому електровози повинні бути оснащенні переносними автоматичними приборами контролю вмісту метану в повітряному середовищі. Використання електровозів у виконанні РП в цьому випадку допускається з дозволу головного інженера виробничого об’єднання при наявності на електровозах переносних автоматичних приборів контролю вмісту метану і концентрації його в ісходящей струї не більше 0,75%.
Відкатка контактними електровозами є найбільш економічною. Це пояснюється значним зниженням експлуатаційних витрат, повністю перекриваючих деякі збільшення капітальних витрат. Капітальні витрати визначаються, з однієї сторони, великою ціною електровоза, а з іншої – необхідністю побудови тягових підстанцій і тягових мереж. Експлуатаційні витрати знижуються, головним чином, за рахунок збільшення швидкості руху, більших мас вантажу і зменшення витрат на обслуговування.
Експлуатація акумуляторних електровозів є більш дорогою за рахунок малого ККД, малого терміну експлуатації й великої вартості акумуляторних батарей.
У деяких випадках використовуються електровози змішаного живлення: контактно-кабельні та контактно-акумуляторні.
Контактно-кабельні електровози мають токоприймач і кабель, намотаний на барабан, встановлений на електровозі. При наявності контактного проводу електровоз працює як контактний; при русі по шляху, де немає контактного проводу, електровоз отримує живлення через кабель, підключений до найбільш близько розташованому контактному проводу. Для підключення до контактного проводу кабель має наконечник – гачок, котрий накидають на контактний провід. При віддалені від контактного проводу кабель розмотується, при приближенні – намотується на барабан за допомогою спеціального двигуна.
Контактно-акумуляторні електровози мають акумуляторну батарею та токоприймач. Електровоз може працювати як контактний, а при русі по шляху, де немає контактного провода, - як акумуляторний. Останнє є їх
перевагою. Заряд акумуляторної батареї може відбуватися на зарядній підстанції або від контактної мережі за допомогою спеціального зарядного пристрою на електровозі.
Для підземної відкатки представляють інтерес електровози з індукційним токоприймачем, що живляться від мережі зі збільшеною частотою струму. Такі електровози отримали назву безконтактних електровозів підвищеної частоти або високочастотних.
Високочастотні електровози отримують живлення через безконтактні токоприймачі, індуктивно зв’язані з тяговим кабелем, заміняючим контактний провід. Токоприймач має форму рамки. У ролі тягового кабеля використовується одножильний кабель. Струм у кабелі має підвищену частоту (5000 Гц). Для компенсації індуктивного опору кабелю послідовно вмикається ємність (конденсатори). Живлення кабелів відбувається від перетворювача частоти, встановленого в тяговій підстанції. Змінний струм підвищеної частоти випрямляється на електровозі в постійний для живлення двигунів. У порівнянні з акумуляторними високочастотні електровози більш безпечні, зручні у використанні, ККД електровозів приблизно такий же, як і в акумуляторних.
-
Система живлення контактного електровозного транспорту
Живлення контактних електровозів виконується за допомогою тягової мережі. Остання складається із живлячих і підсилюючих ліній (кабелів), контактного (повітряного) проводу, рельсового шляху й відсмоктуючих кабелів. Місця під’єднання живлячих (підсилюючих) кабелів до контактного проводу й відсмоктуючих – к рельсовому шляху отримали відповідно назви живлячих та відсмоктуючих вузлів. При електричній тязі, у тому числі й підземній, зазвичай живлячої лінії з’єднують контактний провід з позитивною шиною тягової підстанції, а відсмоктуючі кабелі – рельсовий шлях з негативною шиною підстанції.
Схема живлення тягової мережі підземної електровозної відкатки представлена на Рис 2.
Рисунок 2 - Схема живлення тягової мережі
1-максимальний автоматичний вимикач; 2 і 3 – живлячий та відсмоктуючий кабелі; 4 і 5 – живлячий та відсмоктуючий вузли; 6 і 7 – участковий вимикач та ізолятор
Контактний провід у більшості випадків секціонується, розділяється на окремі, ізольовані один від одного участки, котрі в загальну контактну лінію вмикаються за допомогою участкових (секціонних) роз’єднувачів 6. участки один від одного ізолюються участковими (секційними) ізоляторами 7. Секціонування контактної мережі виконується для полегшення проведення ремонту мережі і ліквідації аварій шляхом від’єднання пошкодженої ланки зі збереженням можливості роботи інших ланок, що мають самостійне живлення.
Секційні ізолятори і роз’єднувачі повинні установлюватися через кожні 500 м контактної мережі, а також на всіх відвітвленнях. У деяких випадках живлення кожної ланки контактного проводу виконується за допомогою окремих живлячих ліній.
- Технічні данні електровоза К14
Технічні дані на електровоз К 14 зведені до Табл 1.
Технічні дані на електровоз К 14 Таблиця 1
|
Параметри |
Електровоз |
|
К14 |
|
|
Колія, мм |
750 |
|
Довжина (по вісям штирьових зчеплень), мм |
1350 |
|
Висота (до верху кабіни), мм |
1650 |
|
Кількість ведучих вісей |
2 |
|
Жорстка база, мм |
1800 |
|
Мінімальний радіус кривої, м |
12 |
|
Кліренс (дорожній просвіт), мм |
100 |
|
Діаметр колеса, мм |
760 |
|
Передаточне число |
14,75 |
|
Номінальна (зчіпна) маса, т |
14 |
|
Часова потужність, кВт |
2·45 |
|
Питома потужність, кВт/т |
6,43 |
|
Часова сила тяги, даН |
2400 |
|
Коефіцієнт тяги |
0,173 |
|
Часова швидкість, км/год |
12,8 |
|
Тривала сила тяги, даН |
700 |
|
Тривала швидкість, км/год |
22 |
|
Кількість двигунів |
2 |
|
Тип двигунів |
ДТНР-45/27 |
|
Напруга, В |
250 |
|
Струм, А: часовий тривалий |
|
|
204 |
|
|
122 |
|
|
Номінальна частота обертання в часовому режимі, об/хв |
1320 |
|
Робочий діапазон токоприймача, мм |
1800-2300 |
Будову та розміщення обладнання електровоза К 14 зображено на Рис 3.1.
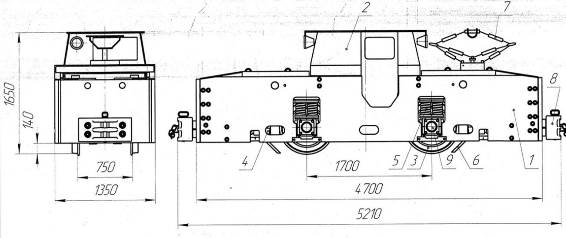
Рисунок 3 - Контактний електровоз К 14
1 – рама; 2 – кабіна; 3 – колісна пара; 4 – гальмівна систма; 5 – пружині ресори; 6 – піскова система; 7 – струмоприймач; 8 – штиріва зціпка;9 – букса;
Принципова електрична схема контактного електровоза К 14 на базі контролера КС-303 зображена на Рис.4.
Рисунок 4 - Електрична схема електровоза К14
Розгорнута схема проходження струму по позиціям контролера при розгоні та гальмуванні зображена на Рис. 5.
Рисунок 5 - Розгорнуті схеми проходження струму на всіх положеннях головного барабану контролера КС-303
-
Характеристика та технічні дані на тяговий ЕП
До привода електровоза представлений широкий спектр жорстких вимог. Робота тягових двигунів проходить в дуже важких умовах при навантаженнях, які змінюються за величиною в широких межах. Тягові двигуни рудничних електровозів під час руху терплять безперервну тряску, часті поштовхи та удари через нерівності рейкової колії. Окрім цього, вони підлягають різним зовнішнім впливам, найшкідливіші з яких – пилі волога. Тяговий двигун повинен володіти великою перевантажувальною здатністю через необхідність розвивати значну силу тяги під час пуску, а також і в дорозі на великих підйомах. Напруга, що підводиться до тягових двигунів, має вагомі та інколи різкі коливання (до 25% від номіналу).
Розташування тягових двигунів електровоза в обмеженому просторі потребує значного зменшення їх розмірів. При цьому вони повинні бути достатньо доступними для огляду, ремонту й обслуговування. Тяговий двигун повинен бути економічним: мати високий ККД та володіти певними характеристиками, що забезпечують максимальне використання його потужності при різноманітних умовах руху й мінімальні втрати енергії на рух потягу.
З усіх типів двигунів найбільше задовольняє вказаним вимогам двигун постійного струму послідовного збудження. У порівнянні з двигунами постійного струму паралельного збудження та асинхронними двигунами змінного струму двигуни послідовного збудження володіють наступними перевагами:
- за однакових умов руху та однакового струму навантаження двигун послідовного збудження розвиває більший момент, тому при зміні навантаження він буде викликати менші коливання потужності, що споживається із мережі;
- на роботі двигуна послідовного збудження майже не відображаються коливання напруги в контактній мережі, так як при цьому змінюється швидкість двигуна, а сила тяги практично незмінна;
- перехідні процеси пуску та гальмування у двигунах послідовного збудження протікають в більш вигідних умовах, що забезпечує підвищену експлуатаційну надійність у важких умовах роботи;
- навантаження між двигунами послідовного збудження, які працюють на спільну механічну систему (колісні пари, зв’язані між собою рейками), розподіляється більш рівномірно, а робота двигунів у цих умовах більш стійка.
Виходячи з вищевказаних переваг, на електровозі К14 застосовані двигуни постійного струму з послідовним збудженням ДТНР-45/27.
Паспортні дані електродвигуна ДТНР-45/27 наведені в Табл 2.
|
Режим роботи |
годинний |
тривалий |
|
Номінальна потужність, кВт |
45 |
27 |
|
Номінальна напруга, В |
250 (+75/-50) |
250 (+75/-50) |
|
Номінальний струм, А |
204 |
122 |
|
ККД,% |
88 |
88 |
|
Номінальна частота обертання, об/хв |
1320±50 |
1640±120 |
|
Максимальна частота обертання, об/хв |
4000 |
4000 |
|
Напрям обертання |
реверсивний |
реверсивний |
|
Збудження |
послідовне |
послідовне |
|
Виконання |
рудничне |
нормальне |
|
Ступінь захисту |
IP43 |
IP43 |
|
Охолодження |
ICO1 |
ICO1 |
|
Маса, кг |
Не більше 580 |
Не більше 580 |
|
Кількість пар щіток |
2 |
2 |
Номінальним режимом роботи тягових двигунів вважається годинний режим, при якому допустима температура двигуна досягається через 1 годину його роботи. Довготривалому режиму відповідає такий струм, при якому допустима температура двигуна досягається за необмежено довгий час.
На електровозі встановлено два привода, що включають в себе колісні пари, редуктори, букси та електродвигуни. Тобто привод електровоза двохдвигунний. Привод електровоза зображений на Рис 6.
Рисунок 6. - Привод електровоза.
1 – електродвигун; 2 – колісна пара; 3 – букса; 4 - редуктор
Редуктор двоступінчатий конічно-циліндричний. Конічна пара шестерень з дозаполюсним зачепленням Новикова. Кінематична схема привода наведена на Рис 7.
Рисунок 7 - Кінематична схема привода
Електромеханічні характеристики тягового електродвигуна ДТНР-45/27, з метою полегшення розрахунків, приведені до обіду колеса (Рис 8).
Рисунок 8 - Електромеханічні характеристики тягового
двигуна ДТНР-45/27
-
Порівняльний аналіз систем пуску та регулювання швидкості тягового привода
- Реостатне регулювання
У контактному електровозі К14 регулювання швидкості виконується за допомогою ступінчатої зміни контролером величини послідовно включених з двигуном регулювальних резисторів разом з послідовно-паралельним переключенням двигунів. Одним із головних недоліків цього методу є значні втрати енергії в пускових резисторах. На Рис 9 приведена пускова діаграма електровоза з реостатним регулюванням без врахування втрат у двигунах. (В інтервалі часу t1 двигуни з’єднані послідовно, а в інтервалі часу t2 – паралельно).

Рисунок 9 - Пускова діаграма рудничного електровоза
з реостатним регулюванням
Втрати енергії в реостаті при пуску Рр складають 33% споживаної електровозом енергії та обумовлює практично середню величину втрат енергії від отриманої до 60% при маневрах і до 30% при нормальній роботі. Оскільки значну частину робочого часу рудничного електровоза складає переміщення на знижених швидкостях із введеними в коло якоря двигуна ступенями резисторів, середня величина втрат енергії в електровозі при реостатному регулюванні складає 40%.
Ступінчасте переключення контролером пускових резисторів значно знижує силу тяги електровоза. Розрахункова сила тяги електровоза при пуску Fср є середньою між F та F. За середньою силою тяги розраховується прискорення потягу, яке буде тим більше, чим менші межі коливань F та F. Діапазон коливань сили тяги в період пуску є головним параметром з точки зору допустимої маси потягу, при якій ще можливий його пуск. Звуження меж коливань пускової сили тяги за рахунок подальшого збільшення кількості ступенів контролера призводить до збільшення його масо-габаритних показників, що не припустимо до малогабаритних підземних електровозів.
- Регулювання в системі ТП-Д
Застосовувані для управління рудничними електровозами тиристорні перетворювачі ТП складаються із основних (головних) тиристорів ТГ, пропускаючих енергію від джерела до тягових двигунів, і допоміжних елементів, призначених для запирання головних тиристорів.
Рисунок 10 - Структурна схема тиристорного перетворювача
Схеми примусового запирання тиристорів звичайно, мають комутуючий конденсатор і дросель, які складають LC – контур. Для зміни моменту запирання головного тиристора в схемі передбачені допоміжний тиристор та полупровідниковий некерований вентиль. Застосовують також комутуючі трансформатори, керовані дроселі насичення та інші елементи.
На Рис 10 всі ці допоміжні елементи тиристорного перетворювача умовно представлені у вигляді прямокутника й позначені як тиристорний комутатор ТК.
З метою покращення умов роботи обладнання і підвищення показників регулювання в схему перетворювача додатково включають вхідний Ф1 і вихідний Ф2 фільтри. В якості вхідного фільтра використовують Г-образний індуктивно-ємністний накопичувач енергії, що складається з послідовно ввімкненого дроселя Lф і паралельно включеного конденсатора Сф. Енергія, накопичена у вхідному фільтрі в період паузи, передається через перетворювач у тяговий двигун М через вихідний фільтр Ф2.
ТП може виконувати наступні основні функції (Рис 11): пуск і регулювання частоти обертання тягових двигунів до виходу на природню характеристику (а), імпульсне ослаблення поля (б) та гальмування (в).
Рисунок 11 - Схема включення ТП при різних режимах роботи
Пуск та регулювання частоти обертання (Рис 11, а) виконується за рахунок модуляції імпульсів. Якщо знехтувати комутаційними процесами, то ТП має два стани: провідний та непровідний. У провідному стані до тягових двигунів прикладається імпульс напруги, рівний за величиною напрузі джерела. У цьому режимі струм тягових двигунів зростає
(Рис 12) до значення, обумовленого навантаженням двигуна.
Рисунок 12 - Криві напруги і струму при імпульсному керуванні тяговим двигуном
Тривалість провідного стану визначається тривалістю імпульсу Ти. В непровідному стані струм двигуна замикається через зворотній діод До і зменшується за експонентою. Тривалість непровідного стану визначається періодом Тп (тривалістю паузи). Сума тривалостей станів перетворювача складає тривалість імпульсного циклу
Т=Ти + Тп
При імпульсному ослаблені поля ТП підключається паралельно послідовній обмотці збудження тягового двигуна (Рис 11, б). У провідному стані ТП частина струму якоря буде проходити через нього, а частина через обмотку збудження. В період паузи струми якоря і обмотки збудження будуть однаковими. Робота перетворювача обумовлює зменшення струму збудження, що призводить до зменшення магнітного потоку і збільшенню частоти обертання двигуна. Глибина ослаблення поля визначається тривалістю провідного стану перетворювача.
При виконанні електричного (генераторного) гальмування тиристорний перетворювач підключається паралельно тяговому двигуну (Рис.11, в), а все силове коло електровоза може підключатися к приймачу електричної енергії, в ролі якого використовують акумуляторну батарею або гальмівний реостат. У першому випадку гальмування має назву рекуперативного гальмування. При цьому діод До перешкоджає розряду батареї через імпульсний перетворювач. У другому випадку гальмування називається реостатним. В перший період гальмування тяговий двигун закорочується перетворювачем і за рахунок зилишившоїся ЕДС в ньому різко зростає струм. У період паузи перетворювача цей струм надходить на приймач енергії. Величина гальмівного зусилля визначається, головним чином, величиною струму тягового двигуна, яка залежить від тривалості провідного стану перетворювача. При гальмуванні із-за великих значень струмів двигуна послідовного збудження виникають значні перенапруги в силових колах; з метою зменшення перенапруг прагнуть зменшити струм збудження шляхом відповідного підключення обмотки збудження. При цьому в період імпульсу струм якоря проходить через обмотку збудження, у період паузи якір замикається на приймач енергії, а обмотка збудження – на власний зворотній діод.
- Частотно-імпульсне регулювання
Рисунок 13 - Імпульсні методи регулювання напруги на затискачах тягових двигунів
При частотно-імпульсному методі регулюванні (Рис.13, а) тривалість пропускного стану перетворювача залишається постійною (Ти=const), а змінюється частота повторення імпульсних циклів (f=var). Якщо позначити середню напругу на двигуні Ud, а напругу джерела живлення U, то спосіб частотно-імпульсного регулювання з постійним часом характерезується наступним виразом:
де - відносна тривалість пропускного стану перетворювача, скважність імпульсів.
ЧІР-2 (Рис. 13, б) зі змінною частотою регулювання та постійним часом зачиненого стану тиристора (f=var, Tп=const) поки що не знайшов приміненя. Однак треба відмітити, що при цьому способі пуск виконується при збільшеній частоті, що має гарний вплив на тягові параметри електровозів та зменшує габарити фільтрів. Відносне середнє значення напруги Ud визначається наступним виразом:
Як видно з виразу, відносне середнє значення напруги на двигуні збільшується при зменшені частоти регулювання.
- Широтно-імпульсне регулювання
ШІР – регулювання з постійною частотою регулювання та змінною тривалістю імпульсу (Рис.13, в). В основі ШІР лежить постійна частота слідування імпульсів (f=const). Відносне середнє значення напруги на виході ШІП регулюється зміною тривалості режиму пропускного стану тиристорного перетворювача (Tи=var):
При цьому способі частота регулювання повинна бути вибрана так, щоб спектр виникаючих гармонік звужувався і зменшувався вплив пульсацій струму на прилади сигналізації та зв’язку.
Одним з критеріїв якості системи регулювання є коефіцієнт пульсацій струму тягового двигуна. Величина пульсацій ki знаходиться за виразом
- відносна величина періоду регулювання, котра може бути знайдена за формулою
де Т – період імпульсного циклу, t - постійна часу двигуна з урахуванням противо-ЕДС.
Аналіз приведених вище виразів доводить, що найбільша пульсація струму двигуна спостерігається при скважності, рівній приблизно 0,5 і залежить від частоти регулювання. Але верхня межа частоти обмежується трьома факторами: збільшенням втрат у тиристорах; максимальною паспортною частотою переключення даного типу тиристорів; погіршенням регулювальних параметрів системи імпульсного регулювання в цілому, зменшення діапазону регулювання середньої напруги на двигуні.
- Висновки та вибір системи регулювання
швидкості тягового ЕП
Аналізуючи залежність ki=f() для трьох методів імпульсного регулювання, можна зробити висновок, що частотний спосіб має коефіцієнт пульсацій в 3-4 рази більший, при однакових параметрах двигуна й допустимій частоті переключення тиристорів, ніж широтно-імпульсний спосіб регулювання.
Таким чином, якщо необхідно забезпечити допустиму пульсацію струму тягового двигуна, то при використанні частотних методів регулювання необхідно мати значно більшу (3-4 рази) індуктивність в колі двигуна у порівнянні із широтно-імпульсним методом регулювання.
Характеристики та схема привода на базі ШІП показані на. Таким чином, швидкісні характеристики привода аналогічні таким у системі
ТП-Д.
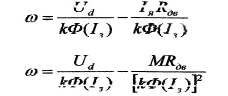
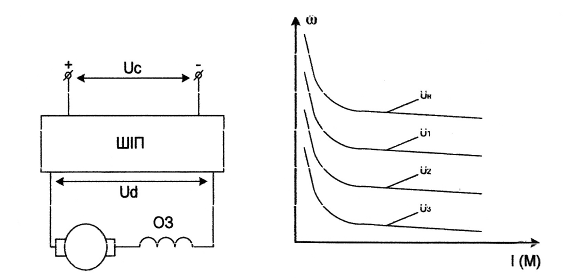
Рисунок 14 - Характеристики та схема привода на базі ШІП
Основні переваги системи постійного струму із широтно-імпульсним керуванням у порівнянні з реостатно-контактним наступні:
- Плавний пуск, що дозволяє на ряду з виключенням втрат енергії в пускових реостатах підвищити середнє тягове зусилля, обмежене лише граничним значенням коефіцієнту зчеплення;
- Підвищення надійності електрообладнання за рахунок виключення контактної комутаційної та пуско-регулюючої апаратури;
- Плавне, без енергетичних втрат регулювання швидкості у всьому діапазоні її зміни.
- Усунення переключення тягових двигунів та збереження постійного паралельного включення, що покращує використання зчіпної маси електровоза;
- Покращення режимів роботи системи електропостачання, через відсутність пікових навантажень в перехідних процесах;
- Можливість підвищення на 10-20 % середньої напруги, що підводиться до двигунів, і відповідне збільшення їх потужності та частоти обертання;
- Захист тягових двигунів від впливу коливань напруги та перенапруги в тяговій мережі;
- Проста автоматизація операцій по керуванню електровозом.
В електроприводі широтно-імпульсний перетворювач та тиристорний перетворювач призначені для регулювання рівня напруги живлення двигуна постійного струму. Проте система ШІП відрізняється від керованого випрямляча двома основними особливостями.
По-перше, частота перемикання ключів набагато більша, оскільки її обмежує не частота напруги живлення, а динамічні можливості самих ключів (для сучасних силових транзисторі частота комутації досягає 20кГц). Звідси:
- малі пульсації вихідного струму й, в наслідок цього, більша стабільність швидкості обертання двигуна;
- відсутність у багатьох випадках потреби в згладжувальному дроселі;
- висока швидкодія (можливість відпрацювання високочастотних керуючих впливів);
- більш високий рівень генерованих перешкод.
По-друге, зв’язок з промисловою мережею змінного струму звичайно, здійснюється через некерований випрямляч. Звідси:
- коефіцієнт потужності наближається до одиниці;
- майже відсутні вищі гармоніки в споживаному з мережі струмі;
- неможливість рекуперації енергії до мережі змінного струму без спеціальних перетворювачів (ведених мережею інверторів).
ШІП у порівнянні із системою ТП-Д не потребує мережі змінного струму, яка вносить додаткові втрати енергії, а також реконструкції існуючої мережі постійного струму.
Проте широтно-імпульсні системи володіють рядом недоліків, найбільш суттєвим з яких являються: пульсація струму, що погіршує режими роботи тягових двигунів через додатковий нагрів та погіршення умов комутації; виникнення радіоперешкод у контактній мережі та навколишньому середовищі.
На основі зробленого аналізу систем керування електроприводом постійного струму, розглянутих недоліків та переваг кожної системи, а також поставлених вимог можна зробити висновок про доцільне та найбільш вигідне використання ШІП в електроприводі контактного електровоза К14.
- Розрахунок та побудова швидкісних і механічних характеристик електропривода
Розрахунок швидкісних та механічних характеристик виконуємо за книгою Голубева В.М. [13].
Сумарний опір якірного кола двигуна:
Ом
Номінальна кутова частота обертання вала двигуна:
рад/с
Будуємо схему заміщення електропривода (Рис.15).
Рисунок 15 - Схема заміщення електропривода.
Для побудови швидкісних та механічних характеристик необхідно визначити діапазон регулювання напруги на двигуні. Приймаємо мінімальний пусковий струм рівний номінальному струму двигуна, тоді початкова напруга діапазону регулювання визначається наступним чином:
В
Отже, діапазон регулювання середнього значення напруги рівний:
Для побудови природної швидкісної характеристики електропривода використаємо швидкісну характеристику електровоза. При цьому кутову швидкість обертання вала двигуна знаходимо через відношення:
рад/с
Таким чином, природна швидкісна характеристика електропривода має вигляд, зображений на Рис 16.
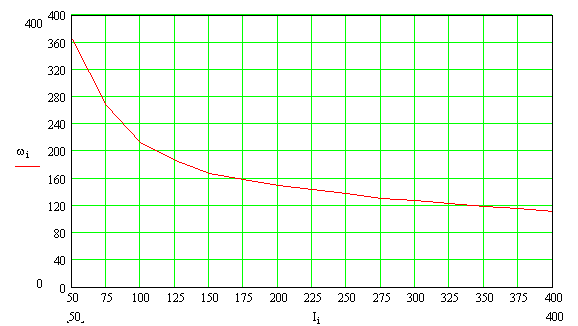
Рисунок 16 - Природна швидкісна характеристика електропривода.
Так як потік двигуна послідовного збудження залежить від струму якоря, то це необхідно врахувати при побудові характеристик привода. Залежність потоку від струму збудження виражається кривою намагнічування, яку можна розрахувати й побудувати, використовуючи природну швидкісну характеристику привода, за наступним відношенням:
Крива намагнічування представлена на Рис 17.
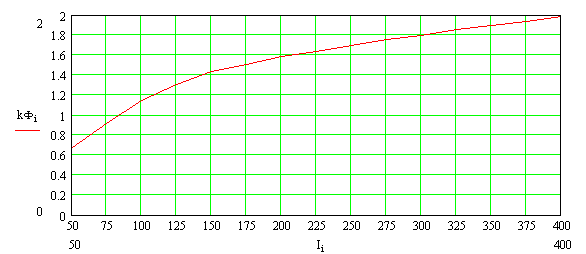
Рисунок 17 Крива намагнічування.
Швидкісні та механічні характеристики відповідно можуть бути описані залежностями:
Змінюючи в межах від 1/16 до 1, отримаємо сімейство швидкісних (Рис 1.22) та механічних (Рис 1.23) характеристик.
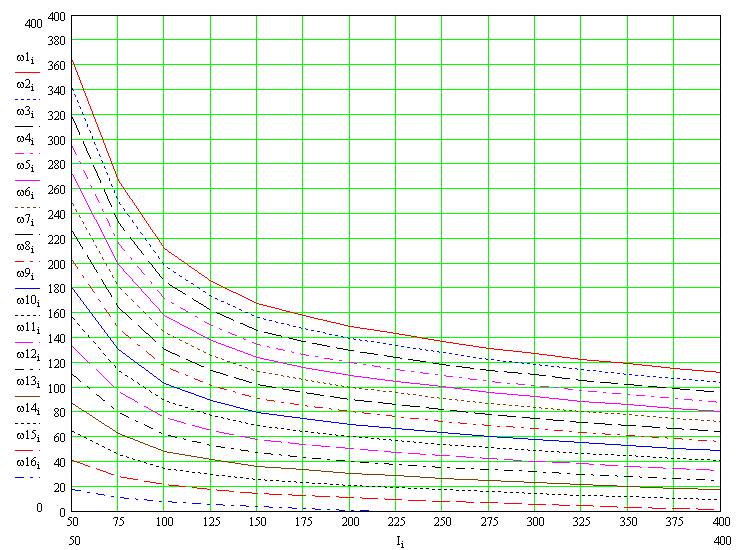
Рисунок 18 - Сімейство швидкісних характеристик привода.
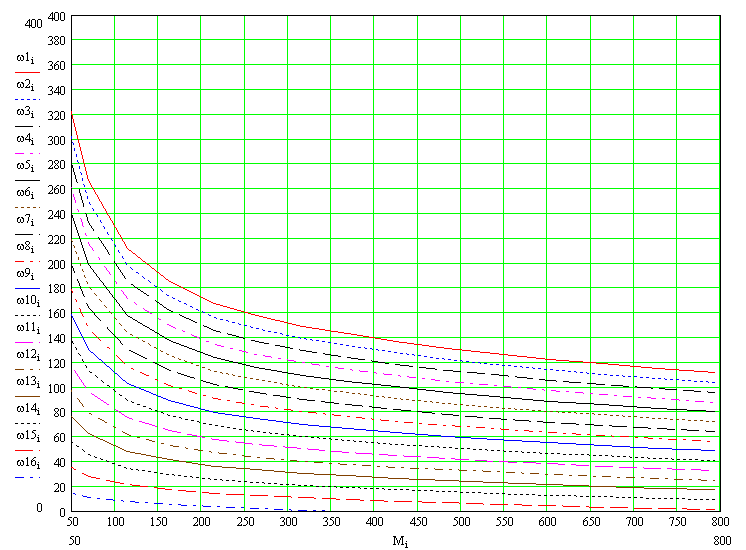
Рисунок 19 - Сімейство механічних характеристик привода.
-
Енергетичні показники привода на базі широтно-імпульсного перетворювача
Енергетичні показники розраховуємо за книгою Пироженко В.Х. [11].
На відміну від керованих випрямлячів функції випрямлення змінної напруги та регулювання його середнього значення в системі ШІП-Д розділені. Функцію випрямлення напруги виконує некерований випрямляч тягової підстанції. Випрямлена напруга згладжується ємкісним або індуктивно-ємкісним фільтром. Функцію регулювання напруги на якорі двигуна виконує широтно-імпульсний перетворювач з принципом переривання енергетичного каналу. Таке розподілення функцій випрямлення та регулювання напруги на навантаженні суттєво впливає на енергетичні процеси привода в цілому та надає системі ШІП-Д важливі переваги в порівнянні з керованим випрямлячем.
Наведена експериментальна залежність коефіцієнта потужності від глибини регулювання kM = f() при імпульсному регулюванні напруги (пряма 1). При цьому струм залишається номінальним. Для порівняння наведена приблизна залежність kM для керованого випрямляча (пряма 2).
Коефіцієнт корисної дії знайдемо аналогічно до за умови постійного номінального навантаження та змінній кутовій швидкості:
Результати розрахунку у вигляді графіку залежності ККД від кутової швидкості представлені на Рис 20.
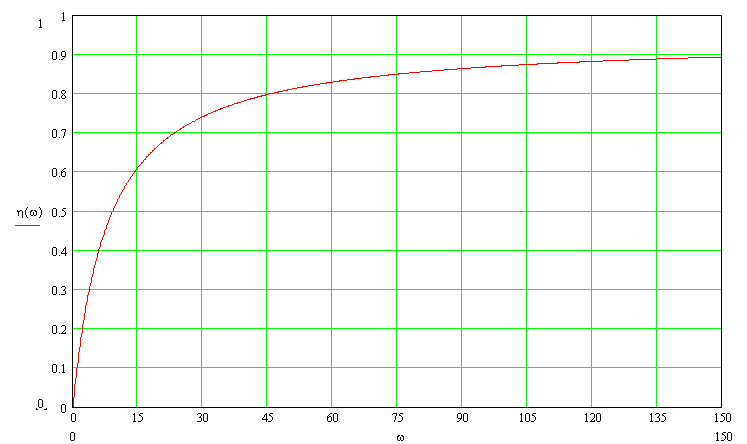
Рисунок 20 Залежність ККД від кутової швидкості.
Неважко встановити залежність кутової швидкості обертання вала двигуна від глибини регулювання, тобто коефіцієнта заповнення:
Підставляючи отриманий вираз у залежність коефіцієнта корисної дії отримаємо закон зміни ККД у залежності від глибини регулювання (Рис 21).
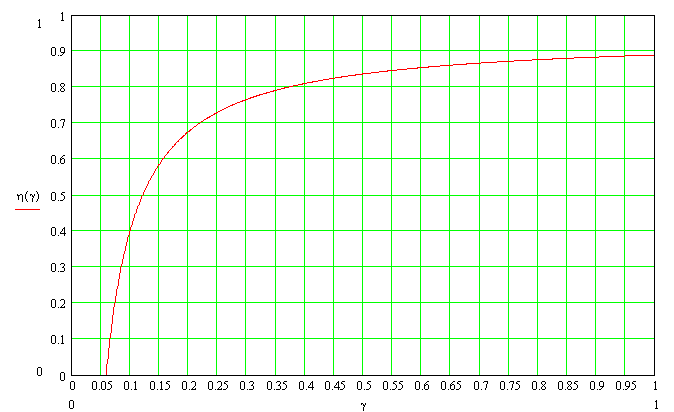
Рисунок 21 Залежність ККД від глибини регулювання.
Як видно із графіка, у діапазоні зміни від нуля до 0,06 коефіцієнт корисної дії рівний нулю. При цьому кутова швидкість обертання також рівна нулю, а машина знаходиться в режимі короткого замикання. Вся активна потужність, що споживається з мережі, витрачається на нагрівання. З точки зору енергетичних процесів, це невигідний режим роботи, а тому варто уникнути його в процесі регулювання, або зменшити час його протікання.
Розв’язуючи рівняння відносно , прирівнявши значення коефіцієнта корисної дії до нуля, отримаємо необхідне для пуску при номінальному навантаженні значення коефіцієнта заповнення min = 0,06. Тоді мінімальне значення напруги на якорі двигуна рівне:
В
Таким чином, підтверджується нижня межа регулювання напруги, що була розрахована за виразом (7.3). Варто відмітити, при відхиленні навантаження від номінального нижня межа регулювання напруги може змінюватися.
Розділ 2
Обґрунтування і розробка системи керування електроприводом
- Електрична принципова схема силових ланцюгів імпульсного перетворювача
Опис силової схеми електровоза виконано за книгою Пироженко В.Х. [11].
Принципова електрична схема силової частини імпульсного перетворювача електровоза К14.Схема складається з: регулятор – елементи Д2, Т5, Т6, Д3, Ск, Lк; тиристорний реверсор Т1-Т4; Rт – гальмівний тиристор; елементи вхідного фільтру – Сф1,Сф2, Lф; контактор – К; елементи кола підзаряду комутуючого конденсатора – R, Д5; відокремлюючі діоди Д1, Д4.
Вибір напрямку руху електровоза виконується перемикачем виду роботи, вмикаючим тиристори Т1, Т4 або Т2, Т3. привод до мережі підключається за допомогою контактора К серії КМ. Для виконання гальмування потягу двигун відмикають від мережі і енергія генеруємо двигуном розсіюється на гальмівному резисторі Rт. При необхідності форсування гальмування в схемі передбачено імпульсно-регулюєма напруга, коли резистор Rт на проміжок часу, визначаємий скважністю, шунтується за допомогою тиристора Т5, діодів Д7, Д6.
Для виключення впливу на живлячу мережу імпульсного відбору потужності в режимі тяги в якості демпферного джерела використовуються елементи фільтра Сф1, Сф2, Lф. Енергія останнього при відривах токоприймача від живлячого проводу і в моменти короткочасної відсутності живлячої енергії (на 5-7 с) використовується для збереження зібраності схеми регуляторів. У свою чергу наявність в схемі перетворювачів режекторного фільтру Сф.п – Lф.п, наладнаного на частоту зв’язку, виконувану по контактному проводу, дозволяє виключити дію вищих гармонічних на засоби СЦБ.
Засіб керування імпульсним регулятором виконано на елементах “Логіка-Т” і забезпечує роботу приводів електровоза зі здвигом у часі на половину періоду комутації, збереження зібраності схеми при відриві пантанографу від контактного проводу, виключення зривів комутації при відновленні контакту пантанограф-контактний провід.
Для комутації силового тиристора використані конденсатори ЭСВ-0,8-0,5 сумарною ємністю 135 мкФ. Для отримання необхідної ємності згладжую чого фільтру використані конденсатори К50-Зф-500-300, включені попарно.
Рисунок 22 - Електрична принципова схема силових ланцюгів імпульсного перетворювача рудничного електровоза К14
Структурну схему імпульсного перетворювача можна представити у вигляді, зображеному на Рис. 22. У схемі прийняті наступні умовні позначення: Ф1, Ф2 – відповідно вхідний та вихідний фільтри, ТП – тиристорний перервник, ТК – тиристорний комутатор, М – машина постійного струму, СКП – система керування перервником .
Рисунок 23 - Структурна схема імпульсного перетворювача.
Тиристорний перервник, основний елемент схеми, служить силовим ключем, який відповідно до закону керування відмикає або підключає навантаження (двигун) до напруги живлення U. Закон керування задається системою керування перервником СКП. Вхідний та вихідний фільтри застосовуються з метою покращення умов роботи обладнання та підвищення показників регулювання.
Тиристорний перервник ТП має виконувати функцію повністю керованого ключа, тобто схема керування має забезпечувати відкривання та закривання тиристора. Повністю керовані силові тиристори поступаються своїми якісними характеристиками та показниками надійності одноопераційним тиристорам. Таким чином, варто обрати для роботи в схемі одноопераційний тиристор. При цьому необхідно забезпечити систему закривання тиристора. З цією метою в схему включений тиристорний комутатор ТК.
Якщо знехтувати комутаційними процесами, то перетворювач має два стани: провідний та непровідний. У провідному стані до тягового двигуна прикладений імпульс напруги, рівний за величиною напрузі мережі. У цьому режимі струм двигуна експоненціально зростає. Час провідного стану залежить від тривалості імпульсу t1 (Рис 23). У непровідному стані струм двигуна зменшується. Час непровідного стану залежить від тривалості паузи t2. Сума тривалостей станів перетворювача складає період імпульсного цикла:
При аналізі характеристик імпульсного керування будемо використовувати коефіцієнт заповнення:
Рисунок 24 - Діаграма роботи імпульсного перетворювача.
Величина напруги на тяговому двигуні Ud при такому керуванні залежить від основних характеристик імпульсного цикла:
Діапазон регулювання середнього значення напруги представляє відношення:
Зміна напруги на зажимах тягового двигуна здійснюється за допомогою керуючого сигналу, що подається на вхід перетворювача. Середня величина напруги на навантаженні залежить від тривалості, частоти й амплітуди імпульсів.
В електровозі з двома тяговими двигунами доцільно використовувати два незалежних перетворювача, кожен з яких окремо працює на свій двигун. Перетворювачі при цьому ввімкнені до контактної мережі паралельно.
Принципова схема імпульсного перетворювача представлена на Рис 25. Основу перетворювача складає одноопераційний силовий тиристор VS1, який виконує функцію вузла комутації.
Застосування перезарядного вентиля VD1 дає можливість підвищити жорсткість зовнішніх характеристик перетворювача, а також виключити вплив на двигун перенапруг, що виникають при комутації силового тиристора. Діод VD3 виконує роздільну функцію, VD4 – зворотний вентиль.
Рисунок 25 Принципова схема імпульсного перетворювача.
У схемі використаний резонансний ланцюг комутації силового тиристора: VS1, VD1, VS2, VD2, C1, L1. Ланцюг R1 – VD5 застосований для підзаряду комутуючого конденсатора C1, необхідність чого пояснюється наступним чином. При роботі двигуна на природній характеристиці заряд конденсатора поступово зменшується до величини, недостатньої для закривання силового тиристора. Введення вказаних елементів виключає таке явище.
2.2 Характеристика тягових двигунів
Перетворення електричної енергії постійного струму в механічну роботу, необхідну для руху електровоза К-14, здійснюється двома тяговими двигунами ДТНР-45/27 з послідовним збудженням. Ці ж двигуни використовують для перетворення механічної енергії в електричну в режимі реостатного гальмування.
Двигуни ДТНР-45/27 виконані з примусовою вентиляцією, що здійснюється вентиляторами двигун-генеретора. Двигуни мають низьку підвіску (на відстані 170 мм від рівня рейки). Тому їх ізоляція може частіше піддаватися всіляким пошкодженням із-за попадання всередину остову води, пилу і інших частинок. У експлуатації найчастіше ушкоджується ізоляція обмоток додаткових полюсів і лобових частин обмотки якоря.
Тяговий двигун ДТНР-45/27 складається з остову, чотири головних і трьох додаткових полюсів, якоря, двох підшипникових щитів з підшипниковими вузлами, чотирьох щіткотримачів, встановлених на двох кронштейнах і однієї колекторної кришки.
Тяговий двигун ДТНР-45/27 має наступні технічні дані:
Потужність 45 кВт
Струм 204 А
Частота обертання 1320 об/мин
Найбільша частота обертання 4000 об/мин
Номінальна напруга 250 В
Опір обмоток при t=20°C:
якоря 0,072 Ом
главних полюсів 0,026 Ом
добавочних полюсів 0,018 Ом
Загальний опір двигуна 0,116 Ом
Клас ізоляції обмоток В
Електріч. міцність ізоляції обмоток 600 В
Опір ізоляції обмоток по відношенню до
корпусу для нагрітих обмоток не менше 0,5 Мом
Маса двигуна 580 кг
2.3 Вибір широко-імпульсного перетворювача
Загальні відомості про широко-імпульсні перетворювачі.
Широко-імпульсні перетворювачі (ШІП) постійної напруги призначені для регулювання середньої напруги на навантаженні.
Діапазон вихідних потужностей ШІП достатньо широкий: від одиниць ватів до сотень кіловат; їх застосування пов'язаний з промисловим електроприводом, електротранспортом, стабілізацією постійної напруги.
Основною перевагою ШІП є високий ККД і cos при живленні від мережі змінного струму через некерований випрямляч. Як комутуючий ключ залежно від величини вихідної потужності застосовуються силові транзистори або тиристори.
Застосування тиристорів - приладів з неповним управлінням - обуславливает необхідність їх примусового замикання за допомогою вузлів комутацій.
Вузли комутації, що є невід'ємною частиною тиристорів ШІП, визначають їх основні характеристики: діапазон регулювання і перевантажувальну здатність.
Поліпшення даних характеристик пов'язане із забезпеченням достатньої величини і тривалості існування зворотної напруги на тиристорі при його замиканні в широкому діапазоні зміни навантаження і вихідної напруги.
Вузли комутації ШІП можуть включатися послідовно або паралельно з робочим тиристором, який, у свою чергу, може бути включений послідовно або паралельно навантаженню.
Застосування тиристорах ШІП для регулювання реверсивних електроприводів вимагає зміни полярності їх вихідної напруги. Дану задачу вирішують реверсивні широко-імпульсні перетворювачі (РШИП). РШИП будуються на основі автономних інверторів напруги.
У разі установки ШІП на електровозі, необхідно вибрати реверсивну схему управління. Це обумовлено необхідністю реверсу швидкості електровоза.
Реверсивні широко-імпульсні перетворювачі (РШИП) є однофазними мостовими інверторами з регулюванням напруги на навантаженні за допомогою широко-імпульсної модуляції і застосовуються в регульованому електроприводі постійного струму. Для РШИП постійної напруги характерні режими симетричної і несиметричної комутації. При симетричній комутації джерело живлення безперервно підключене до навантаження, в процесі регулювання змінюється тільки полярність його включення. Форма напруги на навантаженні має вид двохполярних імпульсів без паузи, що обумовлює значні пульсації струму в навантаженні. Несиметрична комутація характеризується наявністю однополярных імпульсів на навантаженні. Шпаруватість даних імпульсів регулюється. За інших рівних умов несиметрична комутація забезпечує пульсації струму в навантаженні овдовіле менше, ніж при симетричній.
2.4 Вибір реверсивного широко-імпульсного перетворювача
постійної напруги.
Вибір типу комутації (паралельною або послідовною) визначається необхідною перевантажувальною здатністю. ШІП з незалежною послідовною комутацією відрізняється стійкішою роботою при перевантаженнях.
При розрахунку заданими величинами є: струм навантаження номінальний Iн.нoм. (А) (стосовно системи, що розробляється, - це номінальний струм двигуна Iдв.ном. (А)), кратність раптового перевантаження Кп, напруга джерела живлення Е=Uк1, В, частота комутації f, Гц.
Спосіб комутації тиристорів - паралельний, оскільки кратність раптового перевантаження в системі приводу електровоза мала.
Виберемо ШІП по схемі мостового інвертора. Для нього проведемо розрахунок основних параметрів.
Визначаємо індуктивність котушки
Lф0,9Т(Rдв+R0)
Де Т=0,0005с - період перемикання робочого тиристора; Rдв=0,105 Ом - загальний опір двигуна; R0 =0,003 - прямий опір діода.
Lф > 0,9 * 0.0005 * (0.105 + 0.003) = 0.0000486 Гн = 0,0486 мГн.
Визначаємо ємкість комутуючого конденсатора:
С (Кзапаса*tвосст*Iном.макс)/Е
Де Кзапаса=1,15...1,3 - коефіцієнт запасу, tвосст - час відновлення здатності тиристора, що управляє, мкс; Iном.макс. -максимальный струм навантаження; Е - напруга джерела живлення.
С (1.3*2*204)/250 = 2,1216 мкФ
Визначаємо максимальну напругу на тиристорах:
- на робочому тиристорі
Uтмакс =Е(1+Хп.макс.д)
де Х п. макс. д =1,5 - максимальні координати ШІП (визначаються з характеристик);
UТмакс=250(1 + 1.5)= 625 В;
- на комутуючому тиристорі
UТмакс=ЕХп.макс.д
де Х п. макс. к.=2,8 - максимальні координати ШІП (визначаються з характеристик);
UТмакс=250*2.8 = 700 Ст.
По струму тиристори вибираються з умови:
Iтномkзапаса*Iдв.ном
де kзапаса=1,15, тоді:
IТном1.15*204 = 234,6 A.
Визначаємо номінальну потужність комутованого ШІП:
Pном=Е*Iном
Pном = 250 * 234,6 = 58650 Вт.
Рисунок 26 - Реверсивна ШІП по схемі мостового інвертора
Вибір тахогенератора:
Номінальна потужність, Вт Ртгн = 15
Максимальна швидкість вимірювання, об/мин nтгн = 1800
Максимальне вихідне напруга, В Uтгн = 230
Швидкість обертання тахогенератора, рад/с
тгн =nтгн (/30)
тгн =188,495
Коефіцієнт посилення тахогенератора
Ктг =Uтгн /тгн
Ктг=1.22019
Параметри ТГ при номінальному навантаженні
Uтг =н*Ктг
Струм навантаження тахогенератора
Iтгн =Ртгн/Uтг
Опір навантаження тахогенератора
Rдн = Uтг/Iтгн
Rдн =3333.47
Як дільник напруги вибирається дротяний резистор з опором
Rдн = 500 Ом
Вибір датчика струму:
Як датчик струму використовується датчик активного типу, що містить вимірювальний шунт з номінальними параметрами
Iнш = 150 А
Uнш = 100*10-3 В
Коефіцієнт шунта
Кш= Uнш/Iнш
Кш= 6.66667*10-4
2.4 Реалізація регулятора струму
Регулятор струму має пропорційно-інтегральну структуру (має
вигляд [а+(b/p)]) і може бути реалізований наступним способом:
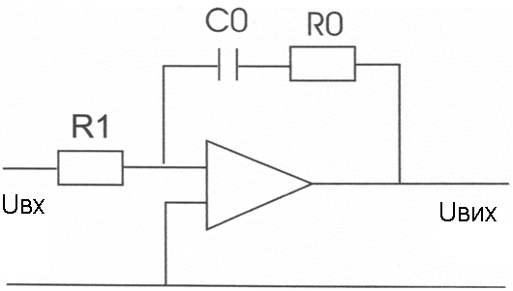
Передавальна функція регулятора струму:
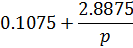
Розрахуємо значення опорів в схемі регулятора
R0/R1 = 0.1075.
Набудемо значення опору R1=1MOm, тоді значення Ro=107,5kOm.
1/(R1*C0) = 2.8875
Тоді Со=0,34пф
Ця система забезпечує наступні показники регулювання: статизм нижньої характеристики діапазону регулювання рівний *=2,228%; перерегулювання за швидкістю =0; час перехідного процесу tпп=0,18 с.
Зменшення часу перехідного процесу в цій системі забезпечується за рахунок компенсації постійних часу (електромагнітною і механічною) за допомогою синтезу регуляторів струму і швидкості. Обидва регулятори були синтезовані на модульний оптимум. Синтез регуляторів по цьому оптимуму забезпечує швидше протікання перехідного процесу, в порівнянні з системою з регуляторами, синтезованими на симетричний оптимум. Але при цьому система з регуляторами по модульному оптимуму програє системі з регуляторами по симетричному оптимуму за показниками статизма (у останній системі статизм дорівнює нулю).

Рисунок 27 - Принципова схема системи електроприводу
Розділ 3
Моделювання динамічних режимів роботи електропривода на ЕОМ
3.1 Моделювання статичних та динамічних режимів
розімкненої системи електропривода
Розрахунок додаткових параметрів
Розрахунок додаткових параметрів виконуємо за книгою Пироженко В.Х. [11].
Індуктивність якоря визначається за наближеною формулою Уманського:
Гн
де k – конструктивний коефіцієнт, який для скомпенсованих машин дорівнює 0,25; UH – номінальна напруга; p – кількість пар полюсів, яка для даної машини рівна 2; Н – номінальна кругова частота обертання двигуна; IH – номінальний струм двигуна.
Індуктивність обмотки збудження приймаємо вдвічі більшою за індуктивність якоря:
Гн
Таким чином, сумарна індуктивність якірного кола:
Гн
Момент інерції двигуна:
кг·м2
Складемо рівняння кінетичної енергії для руху состава в номінальному режимі за умови рівномірного розподілення навантаження між приводними двигунами:
де J – сумарний приведений до вала двигуна момент інерції; ДВ – номінальна кругова частота обертання вала двигуна; JДВ – момент інерції двигуна; kмех – коефіцієнт, що враховує механічну передачу привода; mc, c – відповідно маса та швидкість руху состава.
При повністю завантаженому составі його маса визначається наступним чином:
кг
де mел.в. – маса електровоза; nваг – кількість вагонеток; mваг – маса вагонетки; mруд – маса руди, завантаженої у вагонетку.
Таким чином, сумарний приведений до вала двигуна момент інерції рівний:
кг·м2
3.2 Розрахунок перехідних процесів у реостатній системі
Модель діючої реостатної системи привода електровоза дає можливість детально розглянути в найбільш наближених до реальних умов процеси, що протікають в електроприводі в динамічних режимах. При цьому можна зробити висновок про позитивні та негативні якості системи, оцінити її енергетичні та динамічні показники .
Модель, схема якої представлена, виконана в програмному пакеті Simulink Matlab.
Модель відображає процес пуску повністю завантаженого состава за умови рівномірного розподілення навантаження між двигунами.
Основою схеми є два приводні двигуна, які в процесі пуску ввімкнені спочатку послідовно через відповідні секції пускового реостата R1 – R5, а потім паралельно через секції R6 – R7 до виведення на природну характеристику. Перемикання секцій реостата і двигунів під час пуску із зазначенням відповідних опорів наведені в таблиці 3. Зміна опору пускового реостата здійснюється шляхом шунтування відповідних секцій ключами з незначним опором. Опором провідників у схемі знехтувано. Живлення схеми здійснюється від джерела постійного струму напругою 250 В. Час моделювання становить 20 секунд.
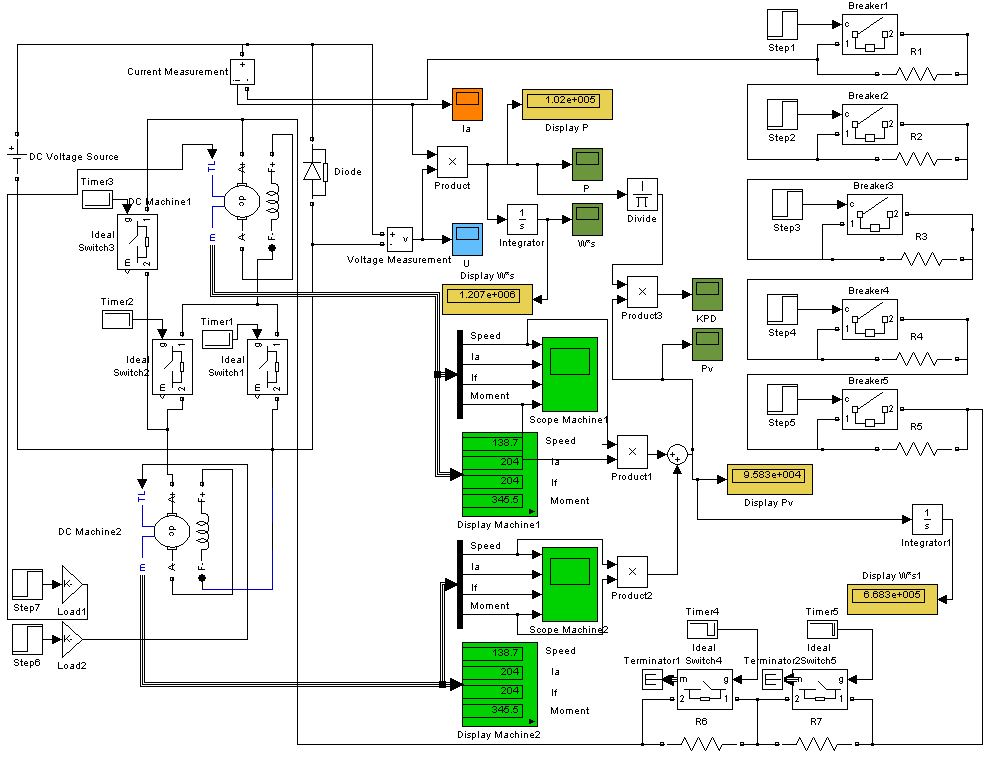
Рисунок 28 - Схема моделі реостатної системи.
Табл. 3.
|
№ ступіні |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Підключення двигунів |
Послідовне |
Паралельне |
|||||||
|
Час ввімкнення, с |
0 |
1 |
2 |
3 |
5 |
10 |
12 |
13 |
17 |
|
Опір, Ом |
3,6 |
2,5 |
2,3 |
2 |
1,3 |
0 |
0,8 |
0,3 |
0 |
Схема для контролю за її показниками під час роботи обладнана набором датчиків та приладів.
На графіку також простежуються періоди недовикористання двигунів по струму, що являється недоцільним з точки зору енергетики.
|
Рисунок 29 - Графіки зміни а) кутової швидкості; б) струму якоря; в) струму збудження; г) момента на валу приводного двигуна |
|
а) |
б) |
в) |
г) |
Важливим показником роботи привода являється коефіцієнт корисної дії, який визначаємо через відношення сумарної потужності на валах двигунів до спожитої потужності. Потужність на валу кожного двигуна знаходимо як добуток момента й кутової швидкості. Залежність ККД від часу в процесі пуску зображена на рис. 30. Необхідно відмітити, що значення ККД завищене через неврахування механічних втрат.
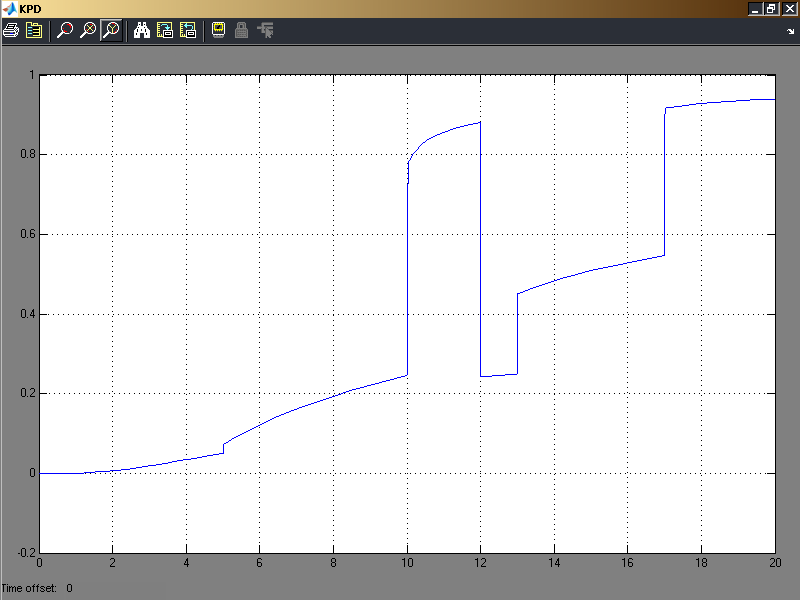
Рисунок 30 - Залежність ККД від часу в процесі пуску.
Як видно із графіка, ККД набуває високого значення лише при повністю виведеному реостаті на ділянках 10-12 с та 17-20 с, а в інші періоди не перевищує рівня 0.6. Таким чином, у реостатній схемі керування пуском електровоза простежуються великі невиправдані втрати потужності, які сягають половини спожитої електроенергії. Удосконалення системи електропривода має на меті зменшення цих втрат.
3.3 Розрахунок перехідних процесів у системі ШІП-Д
Модель, схема якої представлена на рис. 31 виконана аналогічно до реостатної системи керування в програмному пакеті Simulink Matlab. Модель відображає процес пуску повністю завантаженого состава.
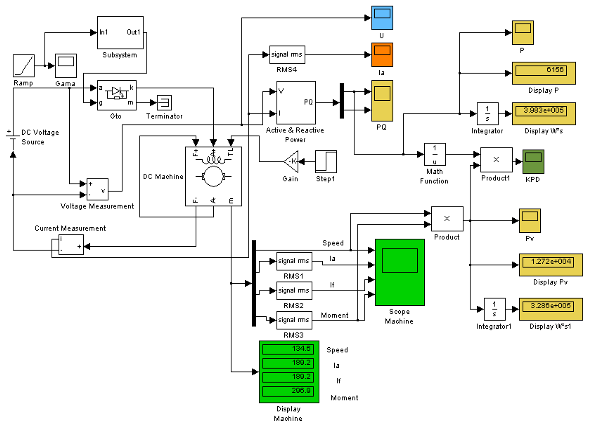
Рисунок 31 - Схема моделі системи ШІП-Д.
Комп’ютерне моделювання дозволяє з високою точністю спрогнозувати поведінку системи при різноманітних режимах роботи. Основними перевагами такого моделювання являються: висока швидкість обробки результатів; висока точність отриманих даних; економічність експерименту, що не потребує дорогого обладнання. Однак на ряду з перевагами комп’ютерне моделювання має також недоліки, найважливішим з яких є практична неможливість врахування усіх факторів, що впливають на систему, особливо випадкових (кліматичні умови, забрудненість, відхилення параметрів системи тощо).
Так як система ШІП-Д передбачає встановлення окремого перетворювача на кожен із двигунів, то доцільно розглядати лише один тяговий двигун, вважаючи процеси в них ідентичними за умови рівномірного розподілення навантаження.
Схема живиться від джерела постійного струму напругою 250 В. Опором з’єднувальних провідників знехтувано.
Графіки зміни відповідно кутової швидкості, струму якоря та збудження, моменту на валу приводного двигуна зображені на рис. 32.
Необхідно відмітити, що струм, а відповідно й момент машини в системі ШІП-Д являються пульсуючими із частотою перемикання силового тиристора. На графіках, однак, відображені діючі значення струму та моменту.
Аналізуючи дані залежності, можна зробити висновок, що процес пуску в системі ШІП-Д характеризується плавним розгоном двигуна. При цьому відсутні кидки струму та поштовхи моменту. Час перехідного процесу, що визначається досягненням номінальної швидкості, зменшився вдвічі в порівнянні зі схемою реостатного пуску.
Коефіцієнт корисної дії визначаємо через відношення потужності на валу приводного двигуна до спожитої потужності. Потужність на валу двигуна знаходимо як добуток моменту й кутової швидкості. Залежність ККД від часу в процесі пуску зображена на рис. 33. Необхідно відмітити, що значення ККД завищене через неврахування механічних втрат.
|
Рис.унок 32 - Графіки зміни а) кутової швидкості; б) струму якоря; в) струму збудження; г) момента на валу приводного двигуна |
|
а) |
б) |
в) |
г) |
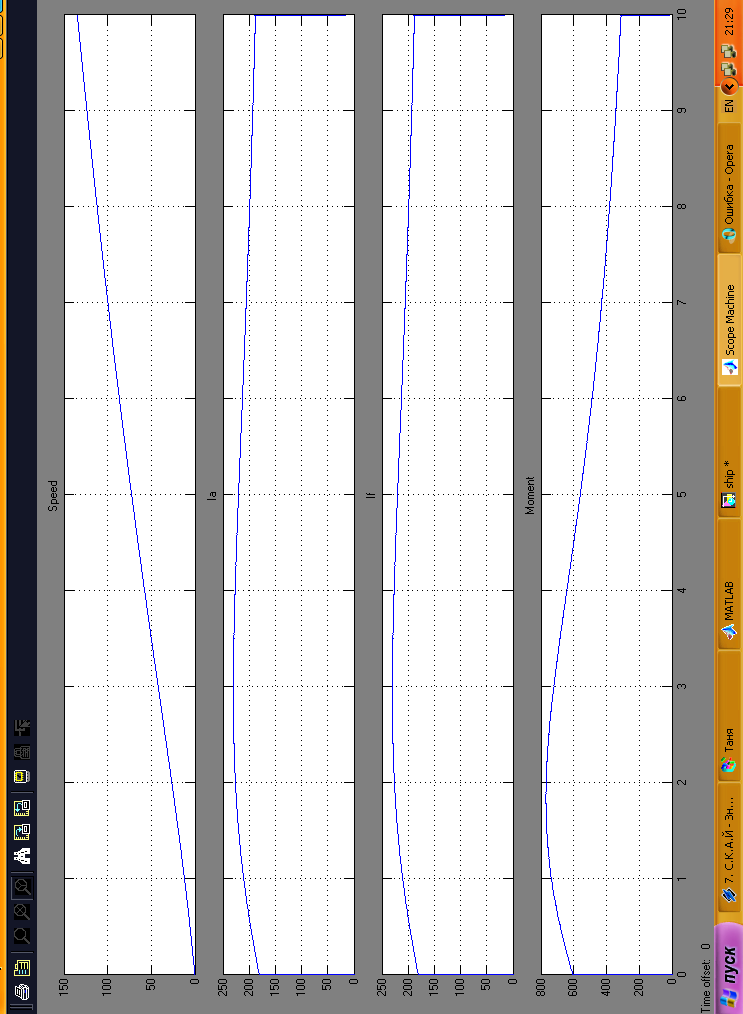
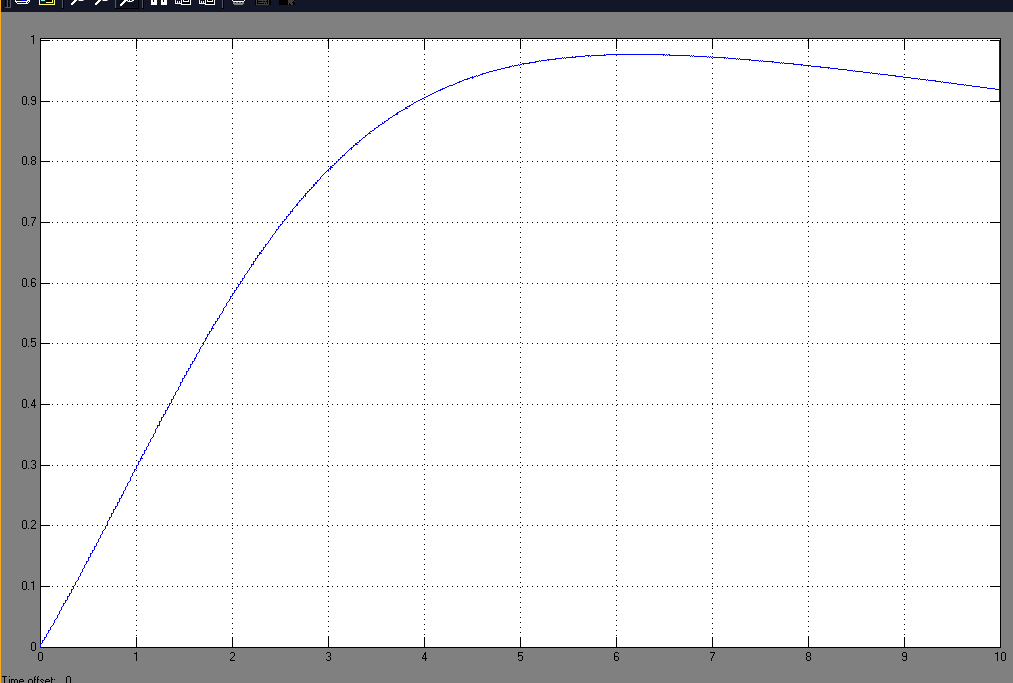
Рисунок 33 -. Залежність ККД від часу в процесі пуску.
Значення ККД в процесі пуску в даній системі, у порівнянні з реостатним пуском, значно вище і здебільшого визначається коефіцієнтом корисної дії безпосередньо двигуна. Графік ККД плавно зростає при розгоні двигуна та не має „провалів” з низькими значеннями.
Порівнюючи затрати електроенергії в обох розглянутих системах електропривода, можна встановити, що економія електроенергії в системі широтно-імпульсного перетворювача у відношенні до системи реостатного пуску становить:
Висновки