Управление техническими системами
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ЮЗГУ
Кафедра «МТиО»
Курс лекций
по дисциплине:
«Управление техническими
системами»
специальность – 151001 «Технология машиностроения»
Курск 2012
В курсе лекций изложены основные вопросы дисциплины «Управление техническими системами. Приведены основные принципы теории автоматического управления, законы регулирования и характеристики систем. Рассмотрена классификация и виды датчиков, применяемых в различных системах управления. Освещены общие вопросы автоматического регулирования станков с программным управлением. Описаны схемы управления технологическим оборудованием.
Курс лекций предназначен для студентов специальности 151001 «Технология машиностроения» для подготовки к учебным занятиям, промежуточному тестированию, а также к зачету по дисциплине «Управление техническими системами».
Содержание
|
[0.1] Содержание
[0.2] Введение. Основные термины и определения.
[1] Раздел 1. Автоматизированные системы управления
[1.1] Тема 1.1 Системы автоматического управления и следящие системы
[1.2] Тема 1.2 Системы автоматического регулирования
[1.3] Тема 1.3 Системы автоматического контроля. Автоматизация контрольных измерений в машиностроении.
[2] Раздел 2 Измерительные преобразователи систем (датчики)
[2.1] Тема 2.1 Классификация и характеристики датчиков
[2.2] Тема 2.2 Схемы включения датчиков
[3] Раздел 3 Системы управления технологическим оборудованием
[3.1] Тема 3.1 Классификация систем управления оборудованием
[3.2] Тема 3.2 Системы числового программного управления промышленным оборудованием
[3.3] Тема 3.3 Микропроцессорные устройства программного управления
[3.4] Тема 3.4 Системы адаптивного программного управления
[3.5] Тема 3.5 Гибкие производственные системы и гибкие производственные модули
[4] Раздел 4. Диагностирование технического состояния систем управления
[4.1] Тема 4.1 Классификация способов и средств диагностирования технического состояния систем управления
[4.2] Тема 4.2 Диагностирование технического состояния систем программного управления
[4.3] Список литературы
|
Введение. Основные термины и определения.
1. Задачи и содержание предмета
2. Состояние и перспективы развития систем управления
3. Примеры систем автоматического управления
1. Идея создания устройств, которые бы работали без участия человека, возникла ещё в глубокой древности. Но автоматические устройства создавались лишь для увеселительных целей. В Древней Греции появилось слово аутомас (самодействующий), от которого произошло название области науки и техники об автоматических устройствах - автоматика.
История развития автоматики:
Развитие автоматических устройств промышленного назначения началось с XVII века, когда изобрели первые турбины и паровые машины, где были использованы парораспределительный механизм, регулятор уровня воды в котле, регулятор частоты вращения вала и т.д.
Кроме того, заметно продвинулось изобретение автоматических устройств с появлением часовых механизмов, после чего было создано множество игрушек, имитировавших движение.
В 1765 г, русский ученый И.И.Ползунов сконструировал и изготовил первый в мире автоматический регулятор для поддержания уровня воды в паровом котле.
Через 20 лет Джеймс Уатт создает автоматический регулятор частоты вращения вала паровой машины.
В XIX в. с развитием электрической промышленности стали изобретаться и электрические автоматические устройства, такие как эл. регулятор частоты вращения вала паровой машины, который изобретен в 1854 г. К.И.Константиновым - русским механиком и электриком.
В 1834 академик Б.С.Якоби создал электродвигатель.
В 1850 г. Э.Х. Ленц создал осциллограф.
В 1865 г. А.П. Давыдов создал следящий привод
В 1874г. В.Н. Чиколев изобрел электронный регулятор со следящей системой.
В 1876 г. вышла монография И. А. Вышеградского "Об общей теории регуляторов", которая положила начало автоматического управления и регулирования.
Далее автоматическое регулирование развивалось с помощью трудов А.М.Ляпунова и авиатора Н.Е.Жуковского.
В тот же период чех А.Стодола исследовал устойчивость регулирования гидро- и паровых турбин, а немецкий математик А.Гурвиц решил общую задачу о критерии устойчивости линейных систем автоматического регулирования.
В 1940-х гг. наука автоматика окончательно сформировало свои понятия и каноны.
Особенно большой скачек произошел с изобретением ЭВМ, прототип которой был создан ещё Б.Паскалем в виде машины, выполняющей арифметические операции.
В настоящее время автоматические системы широко применяются в всех областях деятельности человека – в промышленности, на транспорте, в устройствах связи, при научных исследованиях и др. Во многих отраслях техники возможность автоматизации управления определяет дальнейшее их развитие.
Автоматизация - высшая ступень механизации производственных процессов - существенно улучшает условия труда. Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством.
Автоматизация облегчает труд рабочего, позволяет находиться на безопасном расстоянии от производственного процесса, и, кроме того, способствует увеличению долговечности оборудования благодаря снижению перегрузов, обеспечивает эксплуатацию машин в рациональных режимах при оптимальных расходах электроэнергии, предотвращает возникновение аварийных ситуаций, облегчает поиск неисправностей и этим сокращает простои.
С автоматизацией производственных процессов мы сталкиваемся повсеместно: при осуществлении погрузочно-разгрузочных работ, при контроле производства и качества какой - либо продукции, при проведении анализирования деятельности производства.
Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами.
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. Автоматическое управление широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья
В различных технологических и производственных процессах величины, их характеризующие, должны удовлетворять определенным условиям. Создание условий, гарантирующих требуемое протекание любого процесса, называется управлением, т.е. под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели.
Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Машина, аппарат, агрегат, комплекс машин или система, в которых протекает процесс, подлежащий управлению, называются объектами управления, т.е. это совокупность технических средств, выполняющих данный процесс.
Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Управляющим - называют воздействие, подаваемое на объект с целью изменить ход процесса в соответствии с заданием. Если управление осуществляется без участия человека, то оно называется автоматическим, а если с участием человека - ручным. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ).
Совокупность автоматического управляющего устройства и объекта управления, связанных и взаимодействующих между собой в соответствии с алгоритмом управления, называют системой автоматического управления (СА У).
В теории автоматического управления каждый элемент блок-схемы называют элементарным звеном, реализующим элементарную операцию и характеризующимся математическим выражением. Различают два типа блок-схем: структурные и функциональные, имеющие одинаковое или аналогичное графическое изображение, но различную сущность.
Структурной блок-схемой называют схему, в которой элементарные звенья, обозначенные буквами, соответствующими названиям отдельных электрических устройств (блоков), рассматривают с точки зрения динамики системы и описывают математическими (алгебраическими, дифференциальными, интегральными) уравнениями - передаточными функциями.
Функциональной блок-схемой называют схему с обозначением составных звеньев (функциональных блоков) по роду выполняемых функций.
На рисунке 1 приведена обобщенная структурная схема АСУ.
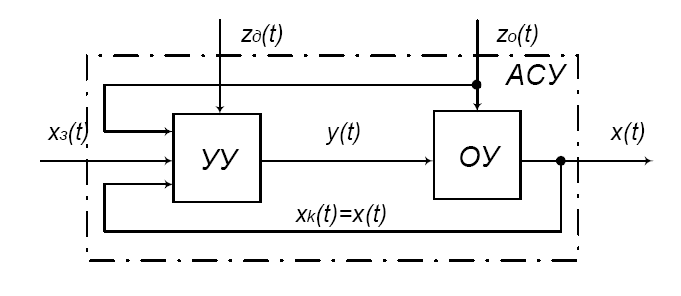
Рисунок - Обобщенная структурная схема АСУ
В ней: x(t) – управляемая величина – физическая величина, характеризующая состояние объекта.
Часто объект управления имеет несколько управляемых величин x1(t), x2(t)… xn(t), тогда говорят об n-мерном векторе состояния объекта x(t) с перечисленными выше компонентами.
Объект управления в этом случае называют многомерным.
Примерами управляемых величин в электрической системе являются: ток, напряжение, мощность, частота вращения и т.д.
zо(t), zд(t) – соответственно основное (действующее на объект управления) и дополнительное (действующее на устройство управления) возмущающие воздействия.
Примерами основного возмущающего воздействия zо(t) являются изменение нагрузки синхронного генератора, температуры охлаждающей его среды и т.п., а дополнительного возмущающего воздействия zд(t) – изменение условий охлаждения УУ, нестабильность напряжения источников питания УУ и т.п.
y(t) – управляющее воздействие.
Управляющее воздействие вырабатывается в управляющем устройстве в соответствии с алгоритмом управления в зависимости от истинного и предписанного значений управляемой величины.
xк(t) = x(t) – контрольное воздействие – информация об истинном значении управляемой величины.
xз(t) – задающее воздействие – предписанное (желаемое) значение управляемой величины.
Воздействия z(t) и xз(t) являются внешними для рассматриваемой системы, а воздействия xк(t) и y(t) – внутренними. Передача внешних и внутренних воздействий происходит через элементы АСУ, которые в совокупности образуют несколько цепей воздействий. На рисунке 3 можно указать, например, цепи воздействий от величины xз(t) к величине y(t) и далее к x(t), от zо(t) к x(t).
Значение управляемой величины, которое следует поддерживать в данный момент времени для правильного протекания техпроцесса, называют предписанным (заданным) значением, а фактическое, т.е. измеряемое значение действительным (текущим). Разницу между заданным и действительными значениями называют рассогласованием.
Сигналы – это совокупность потоков энергии или вещества, поступающих в объект управления или выходящих из него, возмущающие и управляющие воздействия, а также регулируемые параметрами.
По направлению различают входные и выходные сигналы объекта управления. Так возмущающие и управляющие воздействия будут входными сигналами для ОУ; регулируемый параметр всегда принимают за выходной сигнал объекта управления, даже если он физически не выходит за пределы объекта (например температура в топке котла, уровень вещества в бункере, напряжение на обмотках электродвигателя)
Технологические параметры – это физико-химические величины, характеризующие состояние технологического процесса в объекте управления (например, температура, давление, скорость вращения и др.)
Регулируемый параметр – это технологический параметр, значением которого управляют с помощью специальных технических средств. Число регулируемых параметров, как правило, значительно меньше общего числа технологических параметров.
2. Автоматизация является одним из главных направлений научно-технического прогресса и важным средством повышения эффективности производства. Современное промышленное производство характеризуется ростом масштабов и усложнением технологических процессов, увеличением единичной мощности отдельных агрегатов и установок, применением интенсивных, высокоскоростных режимов, близких к критическим, повышением требований к качеству продукции, безопасности персонала, сохранности оборудования и окружающей среды. Экономичное, надежное и безопасное функционирование сложных технических объектов может быть обеспечено с помощью лишь самых совершенных технических средств, разработка, изготовление, монтаж, наладка и эксплуатация которых немыслимы без знания ТАУ.
Современными тенденциями в автоматизации производства являются:
- широкое применение ЭВМ для управления;
- создание машин и оборудования со встроенными микропроцессорными средствами измерения, контроля и регулирования;
- переход на децентрализованные (распределенные) структуры управления с микроЭВМ;
- внедрение человеко-машинных систем;
- использование высоконадежных технических средств;
- автоматизированное проектирование систем управления.
3. Рассмотрим в качестве примера системы автоматического управления технологический процесс – регулирование температуры в электропечи для закаливания металла. Для реализации этого процесса электропечь снабжается управляющим (или регулирующим) органом, с помощью которого можно управлять процессом закаливания – изменять температуру в соответствии с заданным законом.
Представим данный процесс с помощью функциональной схемы ().
Рисунок - Функциональная схема технологического процесса закаливания металла в электропечи
Данная система поддерживает необходимый режим, т.е. изменение температуры y(t) в электропечи по заданному закону. Для обеспечения требуемого процесса электропечь снабжается двумя элементами: термопарой, с выхода которой получают электрической напряжение x(t), пропорциональное температуре в электропечи, и реостатом, с помощью которого меняется сопротивление в цепи ее нагрева.
Предусмотрен прибор, на котором фиксируется реальная температура в электропечи. Отклонение реальной температуры от заданной не должно превышать допустимого значения (t). В системе имеется обратная связь.
При автоматическом управлении процессом воздействие u(t) на управляемый орган (реостат) осуществляет специальное управляющее устройство. Поскольку с выхода термопары получают сигнал очень небольшой мощности, в схему вводят промежуточное звено – усилитель мощности.
Сигнал y(t) (заданной температуры в печи) называют управляющим, сигнал x(t) (реальной температуры) – управляемой переменной, а систему, реализующую процесс закаливания – системой автоматического управления.
Еще одним примером является САУ, предназначенная для регулирования уровня жидкости в парогенераторах и конденсаторах. Принципиальная схема такой системы представлена на рисунке 3.
Рисунок - Принципиальная схема автоматического регулирования уровня жидкости
Уровень жидкости h(t) завит от разности двух величин: ее притока Gп и расхода Gр. Если Gп>Gр, уровень растет, и наоборот, при Gп<Gр уровень уменьшается. Приток Gп можно изменять посредством регулирующего клапана (РК), который управляется электроприводом (П). Сигнал, соответствующий действительному уровню h(t), измеряется уровнемером (УМ) и сравнивается с заданным уровнем hз.
В зависимости от значения и знака сигнала рассогласования (t) регулятор посредством электропривода увеличивает (при >0) или уменьшает (при <0) приток жидкости Gп, поддерживая равенство между Gп и Gр при заданном уровне hз. Изменение расхода Gр нарушает баланс в схеме, т.е. Gр является возмущающим сигналом.
Для повышения точности регулирования наряду с сигналом (t) используется сигнал Gп, который обеспечивает местную ОС, или так называемое комбинированное регулирование.
Выходной сигнал некоторых расходомеров (РМ) пропорционален квадрату расхода жидкости, поэтому цепи измерения их расходов содержат блоки извлечения корня (БИК).
Можно записать: сигнал на выходе системы (заданное воздействие) y(t)= hз; сигнал на выходе системы (уровень жидкости) x(t) = h(t); сигнал возмущения (расхода жидкости) u(t)= Gр(t).
Раздел 1. Автоматизированные системы управления