ПРОЕКТИРОВАНИЕ ПУТЕВЫХ УСТРОЙСТВ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ НА ПЕРЕГОНАХ ДВУХПУТНОГО УЧАСТКА ЖЕЛЕЗНОЙ ДОРОГИ ПРИ ТЕПЛОВОЗНОЙ ТЯГЕ
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
на тему:
«ПРОЕКТИРОВАНИЕ ПУТЕВЫХ УСТРОЙСТВ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ НА ПЕРЕГОНАХ ДВУХПУТНОГО УЧАСТКА ЖЕЛЕЗНОЙ ДОРОГИ ПРИ ТЕПЛОВОЗНОЙ ТЯГЕ»
- номер варианта - №10;
- род тяги поездов – тепловозная тяга;
- характер путевого развития на перегонах – двухпутный;
- длины участка железной дороги – L = 115 км;
- средняя длина перегона на участке – lср = 14 км;
- количество промежуточных станций на участке – 9;
- существующие устройства АТП – трехзн. АБ;
- перспективные устройства АТП – АБТЦ-М;
- число грузовых поездов в одном направлении за сутки – Nгр=75;
- число пассажирских поездов в одном направлении за сутки – Nпасс = 35;
- интервал попутного следования поездов – I = 7 мин.;
- станционный интервал попутного следования - = 4 мин.;
- техническая скорость грузовых поездов – Vгр = 75 км/ч;
- техническая скорость пассажирских поездов – Vпасс = 120 км/ч;
- частота сигнального тока – f = 0 Гц;
- минимальное сопротивление изоляции рельсовой линии - = 0,85 Ом ·км;
- аргумент входного сопротивления приемо-передающей аппаратуры по концам рельсовой линии - вх о = 0 град;
- коэффициент поверхностной проводимости по верхнему слою балласта и шпалам - Р = 0;
- тип путевого приемника рельсовой цепи – одноэлементный;
- тип электрической централизации промежуточной станции – РЦЦМ;
- количество железнодорожных переездов на участке - 17;
- скорость приближения поезда к переезду – Vп = 70 км/ч;
- среднее число стрелок на промежуточных станциях - 11;
Руководитель: доц. Кузнецов В.С
СОДЕРЖАНИЕ
|
Введение………………………………………………………………………….
|
- Аналитический обзор систем автоматики и телемеханики на перегонах магистральных железных дорог и линий метрополитенов………………
|
- Необходимость разработки, особенности построения и аналитический обзор систем АТП на традиционной релейной элементной базе………………………………………………………….
|
- Необходимость разработки, особенности построения и аналитический обзор частотных систем АТП…………………………
|
|
- Необходимость разработки, особенности построения и аналитический обзор электронных систем АТП……………………..
|
|
- Необходимость разработки, особенности построения и аналитический обзор единого ряда микроэлектронных и микропроцессорных систем АТП………………………………………
|
|
- Технические требования к проектируемым путевым устройствам АТП при их децентрализованном размещении на заданном двухпутном участке железной дороги с использованием рельсовых цепей с изолирующими стыками…………………………………………………….
|
|
- Проектирование путевых устройств автоматики и телемеханики на перегонах двухпутного участка железной дороги при тепловозной тяге...
|
|
- Характеристика участка железной дороги оборудуемого проектируемыми путевыми устройствами АТП……………………..
|
|
- Функциональные схемы систем АТП с рельсовыми цепями для двухпутных участков железных дорог…………………………………
|
|
- Функциональные схемы децентрализованных систем автоблокировки с рельсовыми цепями ограниченной и неограниченной длины………………………………………………
|
|
- Функциональные схемы централизованных систем автоблокировки с рельсовыми цепями неограниченной длины….
|
|
- Особенности организации двустороннего движения поездов по одному из путей заданного двухпутного участка железной дороги…………………………………………………………………
|
|
- Эффективность проектируемой системы АТП с рельсовыми цепями ограниченной длины для заданного двухпутного участка железной дороги…………………………………………………………………….
|
|
- Пропускная способность двухпутных перегонов………………...
|
|
- Участковая скорость движения поездов на заданном двухпутном участке железной дороги……………………………..
|
|
- Проектирование путевых устройств автоблокировки с рельсовыми цепями ограниченной длины……………………………………………
|
|
- Задачи и этапы синтеза рельсовых цепей с изолирующими стыками……………………………………………………………….
|
|
- Алгоритм синтеза рельсовых цепей с изолирующими стыками и методика определения оптимальных значений входных сопротивлений по концам рельсовой линии……………………….
|
|
- Разработка математической модели, организация вычислительного процесса на персональном компьютере и выводы по результатам синтеза рельсовых цепей ограниченной длины с заданными параметрами…………………………………..
|
|
- Разработка и анализ принципиальных схем путевых устройств АТП при их децентрализованном размещении на заданном двухпутном участке железной дороги и использованием рельсовых цепей с изолирующими стыками………………………………………………..
|
|
- Схема двухпутной автоблокировки постоянного тока для участков с двусторонним движением поездов……………………..
|
|
- Схема управления автоматической переездной сигнализацией на двухпутном участке с децентрализованной автоблокировкой постоянного тока……………………………………………………..
|
|
- Устройства заграждения железнодорожного переезда………..
|
|
|
Заключение……………………………………………………………………...
|
|
|
Список использованных источников………………………………………….
|
|
|
Приложение А. Организация вычислительного процесса на персональном компьютере для синтеза рельсовой цепи ограниченной длины с заданными параметрами……………………………
|
|
ВВЕДЕНИЕ
Железнодорожный транспорт занимает ведущее место в объеме перевозок грузов и пассажиров. Главная задача, решаемая на ж.д. транспорте всеми его службами, хозяйствами, техническими и организационными мероприятиями заключается в обеспечении нормального непрерывного (штатного) протекания основного технологического процесса движения поездов для удовлетворения потребностей государства для перевозки пассажиров и грузов.
Для нормального (штатного) протекания технологического процесса необходимо выполнение двух требований:
- Обеспечение безопасности движения поездов (БДП)
- Обеспечение необходимого уровня потребной пропускной способности ж.д. линий.
Основная задача систем железнодорожной автоматики и телемеханики (СЖАТ) заключается в обеспечении непрерывного нормального (штатного) протекания частного ответственного технологического процесса регулирования движения поездов в направлении реализации необходимой пропускной способности ж.д. линий при выполнении требований БДП.
Для обеспечения технологического процесса регулирования движения поездов необходимо решить 2 частные задачи:
- На перегоне: обеспечение интервального регулирования движения поездов (ИРДП) при движении с препятствием;
- На станции: организация оперативного регулирования скорости следования (ОРДП), регулирования скорости следования и выбора правильного пути (маршрута) в пределах станции.
Решение этих задач приводит к появлению более частных технологических процессов ИРДП и ОРДП, которые входят в технологический процесс регулирования движения поездов.
Технические средства и системы, которые обеспечивают нормальное протекание частного технологического процесса ИРДП (СИР), называются системами ИРДП или системами обеспечения безопасности на перегоне (СОБ).
В данном курсовом проекте осуществляется аналитических обзор систем автоматики и телемеханики на перегонах (АТП), применяемых на магистральных железных дорогах и линиях метрополитена, рассматриваются функциональные схемы АТП при децентрализованном и централизованном размещении аппаратуры с рельсовыми цепями ограниченной и неограниченной длины. Также рассматривается эффективность проектируемой системы АТП для двухпутного участка железной дороги с изолирующими стыками. Кроме этого осуществляется проектирование путевых устройств (синтез рельсовой цепи ограниченной длины). Приводится анализ основных схемных решений для двухпутных участков железных дорого при двустороннем движении поездов по каждому пути.
-
Аналитический обзор систем автоматики и телемеханики на перегонах магистральных железных дорог и линий метрополитенов
- Необходимость разработки, особенности построения и аналитический обзор систем АТП на традиционной релейной элементной базе.
Системы автоматики и телемеханики на перегонах (АТП) на традиционной релейной элементной базе – это технические средства, осуществляющие ИРДП на перегонах, выполненные на традиционной релейной контактной базе, морально устаревшие, имеющие следующие недостатки:
- Ограниченные функциональные возможности
- Большая инерционность в работе
- Большая металлоемкость (габарит и вес)
- Большое потребление электроэнергии
- Низкая эксплуатационная надежность в работе
- Низкая информативность (использование в канале связи только 3 активных кодовых сигнала «з», «ж», «кж»)
Использование до настоящего времени устаревшей релейной элементной базы в СОБ в какой-то степени можно объяснить следующими обстоятельствами:
- Реле 1-го класса надежности является безопасным элементом с несимметричными односторонними отказами в наибольшей степени отвечающими требованиям БДП
- СОБ на релейной контактной базе за счет допустимости визуального обзора аппаратуры удобно в эксплуатации
- Переключение схемы (на контактах реле) технически просто реализовать в СОБ сложные логические функции по управлению движением поездов
- В настоящее время СОБ на релейной элементной базе обеспечивает решение поставленных задач по реализации потребной пропускной способности перегона с учетом пропускной способности требований БДП.
Автоблокировка (АБ)- представляет собой систему ИРДП, при которой перегоны делятся на отдельные блок-участки, ограждаемые путевыми светофорами, постоянные сигналы которых являются простейшим средством регулирования, обеспечивающие разрешение или запрещение вступления поезда на очередной блок-участок, а также ограничение скорости движения поездов.
В АБ существует блочный способ (с помощью РЦ) определения места положения препятствия.
В существующих системах АБ используются различные схемные решения в зависимости от следующих эксплуатационно-технических условий: род тяги поездов, количество путей на перегоне, характер движения по одному ж.д. пути, способ увязки сигнальных показаний между попутными путевыми светофорами, значность сигнализации путевых светофоров, по роду питающего сигнального тока, протекающего по рельсовой линии и условий электроснабжения ж.д. участков.
В настоящее время на магистральных ж.д. применяются 2 типовые системы АБ, в которых используются разные схемные решения в зависимости от вышеуказанных эксплуатационно - технических условий:
- ИПАБ- импульсно-проводная АБ постоянного тока для одно- и двух-путных участков ж.д. при автономной (тепловозной) тяге с трех- или четырехзначной системой сигнализации на проходных светофорах
- ЧКАБ- числовая кодовая АБ переменного тока для одно- и двухпутных участков ж.д. при электротяге пост или переменного тока с трех- или четырехзначной системой сигнализации на проходных светофорах.
АЛСН – четырехзначная автоматическая локомотивная сигнализация непрерывного типа числового кода.
АЛСН представляет собой совокупность путевых и локомотивных устройств с помощью которых осуществляется непрерывная передача сигналов путевых светофоров в кабину локомотива; выполняется периодическая проверка бдительности машиниста при желтом, желтом с красным, красном и белом огнях локомотивного светофора и однократная проверка бдительности при любой смене сигналов; контролируется скорость при желтом с красным и красном огнях ЛС с принудительной остановкой поезда устройствами при потере бдительности машиниста или превышении скорости. Путевая аппаратура АЛСН осуществляет формирование и передачу в РЛ амплитудно-модулированных числовых кодовых сигналов у каждого проходного светофора в зависимости от его сигнального показания.
АПС- устройство автоматической поездной сигнализации.
Для обеспечения БДП и регулирования движения транспортных средств через ж.д. переезд его оборудуют устройствами АПС, к которым относится светофорная поездная сигнализация (без шлагбаума, с автоматическим шлагбаумом), автоматический оповеститель поездной и устройство заграждения переезда (УЗП).
УЗП представляет собой подъемные металлические плиты, перегораживающие в поднятом положении 2 полосы движения для автотранспорта с обеих сторон.
Схемы управления АПС различаются:
- АПСТ - схема управления АПС при АБ постоянного тока для одно- и двухпутных участков ж.д. с тепловозной (автономной) тягой
- АПСЭ - схема управления АПС при АБ переменного тока для одно- и двухпутных участков ж.д. с электротягой постоянного или переменного тока.
ЧДК - частотная система диспетчерского контроля. Устройства диспетчерского контроля движения поездов, применяемые на участках, оборудованных АБ, предназначены для сбора, передачи и отображения информации поездному диспетчеру об установленном направлении движения, занятости блок-участка, главных и приемо-отправочных путей станций, показания входных и выходных светофоров.
Передача нормативной информации о движении поездов осуществляется в 2 этапа:
- Оперативная информация о движении поездов по перегонам поступает на промежуточную станцию
- Оперативная информация с промежуточной станции передается на центральный диспетчерский пост
Для реализации 1-го этапа работы используется принцип частотного уплотнения каналов (16 каналов). Реализация 2-го этапа ЧДК для передачи оперативной информации на центральный диспетчерский пост основан на использовании частотно- распределительного принципа.
- Необходимость разработки, особенности построения и аналитический обзор частотных систем АТП
Частотные системы АТП отличаются следующими основными техническими решениями:
- Частотный способ кодирования информации, передаваемой по каналам «путь-локомотив» и «путь-путь»
- Использование более совершенных бесстыковых РЦ тональной частоты (ТРЦ)
- Использование кроме традиционной релейной элементной базы более совершенной электронной (полупроводниковой), микроэлектронной (интегральные микросхемы), микропроцессорной.
- По каналу «путь-локомотив» передаются гладкие немодулированные частотные кодовые сигналы, несущие информацию о допустимой скорости движения поездов Vд.
При этом используется:
а) непосредственное частотное кодирование;
б) комбинационное частотное кодирование.
При непосредственном частотном кодировании каждая частота соответствует значению допустимой скорости.
В комбинационном частотном кодировании кодовые сигналы передаются в виде комбинации из двух частот, образуя сочетания из 5 по 2, т.е. всего 10 различных кодовых сигналов. Для увеличения числа сигнальных показаний до 15, применяют дополнительную сигнальную частоту f7=375 Гц. Комбинационные частотные сигналы по сравнению с одиночными обладают большей помехозащищенностью и требуют меньше частотных каналов.
АБТЦ (АБТЦ-2000) – система автоблокировки с ТРЦ без изолирующих стыков(ИС), проходными светофорами и централизованным размещением аппаратуры.
Система АБТЦ внедрялась с 2000 года и является в настоящее время основной системой при реконструкции действующих и строительстве новых ж.д. линий. Основу системы составляют ТРЦ третьего поколения (ТРЦ-3). Предельная длина РЦ составляет 800 м для нормального сопротивления изоляции, а предельная длина РЦ, расположенной за светофором не более 350 м. такая длина РЦ позволяет обеспечить зону дополнительного шунтирования не более 40 м. В зоне установки светофора используется РЦ с несущей частотой 720 и 780 Гц, что позволяет обеспечить меньшую зону дополнительного шунтирования.
Система применяется на одно- и двухпутных участках с нормальным сопротивлением балласта при любом виде тяги. Схемное решение выполнено на малогабаритных реле РЭЛ, АНШ, НМШ. Система АБТЦ выполнена на релейной элементной базе, но осуществлено расширение функциональных возможностей АБ и усиление контроля «потери шунта» при движении поезда.
Особенностью работы АБТЦ является наличие схем замыкания и размыкания перегонных устройств, которые исключают появление разрешающего показания на светофоре в случае ложной свободности РЦ.
Система АБТЦ построена на релейной элементной базе, в связи с расширением функциональных возможностей АБ и усилением контроля потери шунта при движении поезда получилась довольно громоздкой, энергоемкой и сложной в обслуживании. Для исключения этого недостатка, сокращение эксплуатационных расходов на техническое обслуживание и повышение эксплуатационной надежности необходимо использовать системы на современной микроэлектронной и микропроцессорной элементной базе, к которой относится система АБТЦ-М, созданная институтом ВНИИАС.
АБТЦ-М - микропроцессорная система АБ с ТРЦ, централизованным размещением аппаратуры и дублирующими каналами передачи информации, полностью выполненная на микропроцессорной элементной базе.
Это компьютерная СИР, которая обеспечивает управление движением поездов через центральный процессор. Начала внедряться с 2006 года. В системе исключены все релейные схемы, формирование и обработка сигналов ТРЦ переведены на цифровую основу, программная адаптация решает различные задачи интервального регулирования и обеспечения безопасности на перегоне. В системе используют ТРЦ третьего поколения(ТРЦ 3).
Систему применяют при АБ с путевыми светофорами и без них с любым сочетанием каналов АЛСЕ, АЛС-ЕН и цифрового радиоканала. Допускается вместо РЦ использовать счетчики осей. Система АБТЦ-М является иерархической системой ИРДП на перегоне, включает в себя 3 уровня аппаратуры, которые связаны между собой последовательными каналами передачи данных. Верхний уровень предназначен для взаимодействия с другими системами управления и организацией движения поездом, отображения информации о состоянии перегона, а также для получения управляющих команд от оператора дежурного по станции. На среднем уровне выполняются логические зависимости на основании информации о состоянии устройств перегона и других систем, получаемые от нижнего уровня и управляющих команд, получаемых от верхнего уровня системы. Нижний уровень системы предназначен для сбора, обработки информации от путевых датчиков и других систем, ее передачи на средний уровень и исполнение или трансляции управляющих команд, полученных от аппаратуры среднего уровня.
По сравнению с другими системами АБ система АБТЦ-М имеет высокую надежность и большой ресурс работы за счет применения иерархической структуры современной элементной базы и технологии производства, промышленного изготовления, кабельного межблочного монтажа и самодиагностики программных аппаратных средств. А также высокую помехозащищенность.
АПС с ТРЦН – устройства автоматической поездной сигнализации с тональными рельсовыми цепями наложения (ТРЦН).
ТРЦ на перегонах находят все большее распространение из-за своей универсальности. В частности, в случае с переездом для использования дополнительных РЦ, чтобы определить момент вступления поезда на участок приближения перед переездом для закрытия его и момент освобождения поездом переезда на открытие его. На существующие РЦ 25-50 Гц накладываются ТРЦН. Применение ТРЦН, которые накладываются на кодовые РЦ обеспечивает сокращение изолирующих стыков в зоне переезда и вопросы кодирования. На переезде устанавливают 4 ТРЦН.
- Необходимость разработки, особенности построения и аналитический обзор электронных систем АТП
К электронным системам АТП относятся СОБ на современной электронной элементной базе.
К современной элементной базе можно отнести:
- Дискретные полупроводниковые элементы (транзисторы, операционные усилители и т.д.)
- Микроэлектронные устройства в виде интегральных микросхем различной степени интеграции (микросхемы средней степени интеграции 1533)
- Микропроцессорная техника и микросборки (микропроцессорный комплекс 1821 ВМ85 и однокристальная микро ЭВМ 1867 ВМ1)
КУРС-Б – комплексная унифицированная система обеспечения безопасности и регулирования движения поездов.
Относится к наиболее перспективным и совершенным КСИР движения поездов. Координата местоположения и скорость движения поезда определяется спутниковой навигационной системой связи GPS/ГЛОНАСС, а передача этой информации осуществляется по цифровому радиоканалу.
В систему КУРС-Б входят подсистемы:
- КЛУБ-У;
- САУТ-ЦМ;
-ТС КБМ.
КЛУБ-У - унифицированная комплексная локомотивная устройство безопасности. КЛУБ-У как основное устройство системы КУРС-Б предназначено для полной замены несовершенной АЛСН. Создание КЛУБ-У оказалось возможным после разработки микроэлектронной системы АЛС-ЕН. Основной задачей системы КЛУБ-У является не ступенчатый контроль скорости (как в АЛСН) или многоступенчатый (как в АЛС-ЕН) контроль скорости, а непрерывный абсолютный плавный контроль скорости. В КЛУБ-У все физические изменения в положении поездов по спутниковой системе связи записываются в электронную карту регистрации. При этом фактически записываются не координаты местоположения, а режим торможения. Система КЛУБ-У более совершенна, чем САУТ, так например, одним из сложных вопросов из типовых СОБ является защита от несанкционированного трогания локомотивов под запрещающий сигнал. Локомотивная система безопасности КЛУБ-У имеет жесткий алгоритм построения кривой допустимой скорости.
САУТ-ЦМ - модернизированная система автоматического управления торможением поезда с централизованным размещением путевых устройств, выполненная на микропроцессорной элементной базе. САУТ-ЦМ в системе КУРС-Б автоматически определяет эффективность в тормозной системе поезда и при необходимости производит управляемое служебное торможение.
ТС КБМ - телемеханическая система контроля бодрствования машиниста. Эта система производит непрерывный контроль уровня бодрствования по электрическому сопротивлению кожи. Сигналы от датчиков, размещенных в браслете на руке, с помощью микропередатчика поступают на станционный блок для обработки и индикации.
КЭБ - кодовая электронная автоблокировка. КЭБ числового кода построена на электронной технике, микропроцессорах с применением микросборок. Разработана с целью устранения недостатков в типовой системе ЧКАБ, связанных с низкой надежностью электромеханических устройств. Было разработано 2 варианта КЭБ: КЭБ-1 и КЭБ-2.
КЭБ-1- это первый вариант электронной ЧКАБ, который начал разрабатываться в 1992 году. Система КЭБ-1 полностью совместима с ЧКАБ и предполагает частичную замену наименее надежных ее устройств. В КЭБ-1 используются 2 основных блока: генератор кодовых сигналов ГК-КЭБ и приемник- дешифратор кодов ПД- КЭБ, построенных на микропроцессорной технике. ПД- КЭБ заменяет собой весь тракт приема системы ЧКАБ, т.е. импульсное путевое реле ИМВШ и блоки дешифратора автоблокировки типа ДА: блок счетчиков БС-ДА, блок исключения БИ-ДА, блок конденсаторов БК-ДА. Генератор кодовых сигналов ГК-КЭБ вырабатывает числовые кодовые сигналы АЛС и заменяет весь передающий тракт. Сюда входят: кодовый путевой трансмиттер, трансмиттерная ячейка и БКТ- бесконтактная коммутация.
КЭБ-2- второй вариант электронной кодовой КЭБ, разработан в 1997 году и поставлен на опытную эксплуатацию.
Особенности: полностью исключает применение релейно-контактной аппаратуры и является необслуживаемой, т.к. имеет встроенный диспетчерский и технологический контроль. Основные отличия от КЭБ-1 помимо конструктивных изменений является наличие двухпроводной линии связи между сигнальными установками на перегонах и станционными устройствами. Линия связи используется для диспетчерского и диагностического контроля. В общем случае с каждой сигнальной установки может быть получена следующая информация: исправность блока контрольных устройств сигнальной точки (БУСТ), контроль целостности всех нитей ламп светофоров, контроль наличия сигнала мигания, контроль установленного на сигнальной точке направления движения, контроль свободности блок- участка, контроль влияния фидера питания (основной, резервный ), уровень напряжения на питающем и релейном конце РЦ, уровень напряжения на питающем фидере.
АПК ДК - система аппаратно- программного комплекса диспетчерского контроля.
АПК ДК высокого интеллектуального уровня представляет собой вычислительную сеть для централизованного контроля состояния станционных и перегонных устройств автоматики. АПК ДК собирает и передает поездному диспетчеру контрольную информацию о поездном положении в пределах диспетчерского круга. При этом осуществляется также контроль оперативных действий эксплуатационных работников и регистрация внезапных отказов и сбоев основных устройств автоматики. Контрольная информация с перегонов и промежуточных станций передается и отображается на линейных постах, а от них на центральный диспетчерский пост. АПК ДК состоит из трех подсистем, использующих программируемые контроллеры, ПК и специальное обеспечение.
1-ая подсистема (нижний уровень) состоит из автоматов контроля сигнальных точек, обеспечивающих получение и первичную обработку контрольной информации состояния перегонных устройств.
2-ая подсистема (средний уровень) состоит из промышленных компьютеров по одному на каждую станцию, выполняющих роль концентраторов и обрабатывающих информацию от подсистемы нижнего уровня. В эту же подсистему входит компьютер- концентратор центрального поста (ЦП).
3-ая подсистема (верхний уровень) состоит из АРМ диспетчера дистанции сигнализации и связи и работников отделения дороги.
1.5 Единый ряд микроэлектронных и микропроцессорных систем обеспечения безопасности движения поездов на перегоне.
Для обеспечения экономической эффективности внедрения современной микроэлектронной и микропроцессорной элементной базы необходимо добиться ее унификации, т.е. применение не какой-то единичной СОБ, а в целом комплекс систем управления движением поездов, т.е. на ж.д. транспорте необходимо создать микроэлектронную среду. Поэтому была создана научно- техническая программа- единый ряд перспективных микроэлектронных систем и устройств управления движением поездов. К перегонным СОБ единого ряда на современной микроэлектронной базе относятся: АЛС-ЕН, АЛСЕ-САУТ, АБ-ЧКЕ, АБ-Е1, АБ-Е2, АБ-УЕ, ЦАБ-Е, АРС-Е «ДВИЖЕНИЕ».
АЛС-ЕН - микроэлектронная автоматическая локомотивная сигнализация усовершенствованного частотного типа повышенной помехозащищенности и значности единого ряда с непрерывным каналом связи (НКС).
Основной функцией является выполнение многоступенчатого контроля скорости движения поезда и контроля бдительности машиниста. Локомотивные устройства формируют контролируемую Vк и допустимую Vд скорости и сравнивают их с измеряемой фактической скоростью движения. Контролируемая скорость Vк- скорость проследования впереди стоящего светофора. Она формируется по информации, полученной из НКС. Допустимая скорость Vд- скорость, при превышении которой начинается экстренное торможение поезда. Она формируется из контролируемой путем ее сравнивания с предыдущим значением. Фактическая скорость Vф сравнивается с допустимой Vд, при Vф> Vд- формируется сигнал на включение экстренного торможения; Vф> Vк – включается режим периодической проверки бдительности машиниста.
В системе АЛС-ЕН для передачи информации с пути на локомотив используется непрерывный канал связи с несущей частотой 175 Гц, организованный с помощью рельсовой линии с индуктивным приемником. Сигнальная информация передается по НКС путем двукратной фазоразностной модуляции (ФРМ), обладающей лучшими параметрами по помехозащищенности, чем амплитудный и частотный способ модуляции.
Для кодирования передаваемой информации по каждому подканалу используются восьмиразрядные двоичные кодовые комбинации помехозащищенного самосинхронизируещегося модифицированного кода Бауэра с кодовым расстоянием d=4. Это позволяет в каждом фазовом подканале иметь 16 кодовых комбинаций. Кодовые комбинации, передаваемые по первому фазовому подканалу (информационный) содержат информацию о числе свободных впереди поезда блок-участках (до 6), значение скорости проследования светофора 0-200 км/ч, длине впереди лежащего блок-участка, движение по перегону или боковому пути станции.
По второму фазовому подканалу (синхроподканал) передаются кодовые комбинации, служащие для цикловой синхронизации (для адреса).
АБ-ЧКЕ – микропроцессорная система числовой кодовой автоблокировки единого ряда.
Целью разработки системы является повышение устойчивости функционирования РЦ в условиях изменяющегося в широких пределах сопротивления изоляции рельсовой линии, увеличение надежности аппаратуры, повышение помехозащищенности контроля состояния рельсовой линии (КРЛ), снижение энергоматериалоемкости и эксплуатационных затрат на содержание устройства. Система функционально электромагнитно совместима с релейной ЧКАБ. Основным элементом системы АБ- ЧКЕ является микропроцессорный путевой приемо-передатчик (МПП-ЧКЕ), осуществляющий контроль состояния рельсовой линии, демодуляцию, декодирование, управление реле и формирование сигналов на программном уровне. Полезный сигнал в МПП-ЧКЕ обнаруживается методом поиска разладки ( скачкообразного изменения свойств) случайного процесса. Разладка определяется метолом алгоритма комулятивных сумм. Комулятивная (сосредоточенная) сумма- это математическое ожидание случайного процесса (сигнал + помеха). Правило обнаруживания разладки строится на сравнении на n- ом шаге решающей статистики Sn с фиксирующим порогом Uпв. Если на n-ом шаге выполняется условие, что комулятивная сумма SnUпв, то принимается решение о свободном, исправном состоянии рельсовой линии. Иначе, принимается гипотеза о занятом или неисправном состоянии рельсовой линии и выполняется следующие n+1 наблюдение.
АБ-УЕ – микропроцессорная унифицированная система автоблокировки единого ряда с децентрализованным размещением аппаратуры РЦ без изолирующих стыков и путевыми светофорами.
АБ-УЕ –комплексная СОБ, в ней нет сигнальных реле, огнями выходного светофора управляют микроконтроллеры. Целью разработки АБ-УЕ явилось дальнейшее улучшение эксплуатационно-технических свойств автоблокировки, расширение функциональных возможностей устройств. Значительный экономический эффект может быть достигнут за счет унификации аппаратуры автоблокировки по методу технической реализации отдельных модулей на функциональном уровне, конструктивном решении, применяемой элементной базе. Унификация сокращает номенклатуру изделий и позволяет применять индустриальные методы СОБ.
Отличительными особенностями АБ-УЕ являются:
- отсутствие на сигнальных точках электромагнитных реле и других электромеханических приборов;
- наличие встроенной подсистемы диагностического контроля и диагностики аппаратуры;
- возможность реализации функций любой эксплуатируемой на сети ж.д. автоблокировки с децентрализованным размещением аппаратуры путем изменения программного обеспечения;
- возможность дистанционного изменения настроек и технических параметров сигнальной точки.
ЦАБ-Е - компьютерная микропроцессорная система автоблокировки единого ряда с централизованным расположением путевой аппаратуры, РЦ без изолирующих стыков и путевыми светофорами.
В системе ЦАБ-Е впервые реализован принцип многократного использования станционного оборудования для оценки состоянии рельсовой линии (КРЛ) перегона. ЭВМ на центральном посту станции осуществляет временной опрос состояния перегонных РЦ, т.е. последовательно проверяется состояние рельсовой линии всех блок-участков перегона.
Состояние КРЛ определяется частотно- манипулирующими сигналами в диапазоне рабочих частот 1650- 1850 Гц. информация кодируется с помощью восьми разрядного модифицированного кода Бауэра. Решение о состоянии рельсовой линии принимает ЭВМ, выполняющая функцию приемника, который поочередно подключается к перегонным РЦ. Одна ЭВМ используется на половину перегона, а другая контролируется ЭВМ на соседней станции. Если уровень сигнала в РЦ превышает пороговое значение и принятые кодовые комбинации принадлежат множеству разрешенных комбинаций кода Бауэра, принимается решение о свободности РЦ. В противном случае, считается, что РЦ занята. Решение комплектов, контролирующих состояние РЦ сравнивается друг с другом. Одним из существенных преимуществ систем автоблокировки с централизованным размещением аппаратуры является возможность эффективной реализации адаптивных алгоритмов функционирования РЦ, существенно повышающих устойчивость их работы при изменении параметров в рельсовой линии и влияния различных помех (адаптивных, мультипликативных).
- Технические требования к проектируемым путевым устройствам АТП при их децентрализованном размещении на заданном двухпутном участке железной дороги с использованием рельсовых цепей с изолирующими стыками.
Проектируемые путевые устройства АТП при их децентрализованном размещении на заданном двухпутном участке железной дороги и использованием рельсовых цепей с изолирующими стыками должны отвечать следующим общим техническим требованиям.
Основные технические требования, предъявляемые к системе:
- Путевые устройства АТП при их децентрализованном размещении должны устойчиво работать в диапазоне температур
от -60 С до +60;
- В электрических схемах проектируемой системы АТП любое повреждение элементов схем, вероятность которых выше , не должно приводить к появлению более разрешающего показания на путевом светофоре;
- Отсутствие любых показаний на путевом светофоре (светофор с погашенными огнями) требует остановку поезда перед этим светофором и приравнивается к светофору с красным показанием;
- При перегорании нити лампы запрещающего (красного) огня на данном путевом светофоре автоматически должен включаться запрещающий огонь на предыдущем по ходу движения поездов светофоре (перенос красного огня).
- При повреждении изолирующих стыков (отказ в виде короткого замыкания изолирующих стыков) не должен приводить к появлению на путевом светофоре более разрешающего показания;
- При двухстороннем движении по одному и тому же пути на двухпутном участке железной дороги, проектируемые системы АТП должны обеспечивать исключение возможности одновременного отправления поездов на перегон во встречном направлении по тому же пути.
- Обеспечение ЭМС путевых устройств проектируемой системы АТП с устройствами АЛС.
- Проектирование путевых устройств автоматики и телемеханики на перегонах двухпутного участка железной дороги при тепловозной тяге
- Характеристика участка железной дороги оборудуемого проектируемыми путевыми устройствами АТП
Согласно заданию, участок железной дороги имеет следующую характеристику:
-род тяги поездов – тепловозная;
-характер путевого развития – двухпутный;
-длина участка железной дороги – L = 115 км;
-максимальная/средняя длина перегона на участке – lmax/lср- 18/14 км;
- количество промежуточных станций на участке – 9;
- интервал попутного следования – I = 7 мин;
- станционный интервал попутного следования – п = 4 мин;
- техническая скорость грузовых поездов – Vгр = 75 км/ч;
- техническая скорость пассажирских поездов – Vпасс = 120 км/ч;
-число грузовых поездов в одном направлении за сутки –Nгр = 75;
- число пассажирских поездов в одном направлении за сутки – Nпасс = 35;
-частота сигнального тока – 0 Гц;
- минимальное сопротивление изоляции рельсовой линии – rимин= 0,85 Ом*км.
- Особенности организации двустороннего движения поездов по одному из путей заданного двухпутного участка железной дороги.
Важным условием повышения эффективности, качества и четкости работы железнодорожного транспорта, устойчивого выполнения плана перевозок и дальнейшего развития всех отраслей железнодорожного хозяйства является повышение уровня всей эксплуатационной работы, улучшение организации движения и технологии перевозок. Двустороннее движение поездов по каждому пути двухпутного перегона позволяет наиболее гибко регулировать поездопоток при наличии неравномерного движения поездов по направлениям, а также позволяет осуществить безостановочный обгон.
В тех случаях, когда проводится капитальный ремонт одного пути на двухпутном участке, предусматривается временное двустороннее движение по другому пути. В схемах типовой двухпутной автоблокировки предусмотрены переключающие устройства для регулирования движения поездов в неправильном направлении средствами автоматической локомотивной сигнализации.
После переключения пути на двустороннее движение интервальное регулирование движения поездов в пра�вильном направлении осуществляется средствами автоблокировки и автоматической локомотивной сигнализации, а в неправильном направлении — только средствами автоматической локомотивной сигнализации. Так как в неправильном направле�нии светофоры не установлены, то границы блок-участков определяют светофоры, установленные в правильном направлении движения.
3.3 Эффективность проектируемой системы АТП с рельсовыми цепями ограниченной длины для заданного двухпутного участка железной дороги
- Пропускная способность двухпутных перегонов
Эффективность существующих и внедряемых перспективных систем железнодорожной автоматики и телемеханики оценивают по следующим основным показателям:
- пропускной способности;
- участковой скорости;
- капитальным затратам;
- эксплуатационным расходам,
- степени безопасности движения поездов;
- производительности и условиям труда.
В курсовом проекте сравнивается эффективность существующих устройств автоблокировки (АБ) с устройствами релейной полуавтоматической блокировки (ПАБ) Сравнение эффективности АБ и ПАБ осуществляется в условиях одинаковых размеров движения и идентичности подвижного состава. Из показателей эффективности используется пропускная способность перегонов и участковая скорость движения грузовых поездов
Рассматриваемая система автоматики и телемеханики на перегоне (АТП) может быть использована в случае, если обеспечиваемая ею наличная пропускная способность перегона Nнал не меньше потребной пропускной способности
NHАЛ NПРОП (3.1)
Наличной пропускной способностью железнодорожного участка называется число поездов (пар поездов), которое может быть пропущено по этому участку в единицу времени (сутки) при заданных технической оснащенности и способе организации движения поездов.
При расчете суточной наличной пропускной способности участка следует
учитывать время необходимое для организации технологических «окон» tTЕХH и коэффициент надежности работы технических устройств н.
Под технологическим «окном» понимают свободный от пропуска поездов промежуток времени, заложенный в графике движения и необходимый для выполнения работ по техническому обслуживанию и ремонту устройств: пути, контактной сети СЦБ.
Коэффициент надежности н учитывает потерю пропускной способности при отказах технических средств.
При доминировании на участке грузовых поездов наличную пропускную способность линий определяют в грузовых поездах установленного веса. На двухпутных перегонах она определяется при безостановочном следовании поездов через раздельные пункты по каждому пути.
Наличная пропускная способность двухпутного перегона при ПАБ определяется для каждого пути по формуле (3.2):
, (3.2)
расчетных грузовых поездов в сутки,
гд е 1440 - число минут в сутках;
tтехн =120 мин – суточные потери на организацию технологического окна на двухпутном перегоне;
tгр - время хода для заданного пути грузового поезда по лимитирующему перегону, т.е. такому, для которого это время больше, чем время хода по остальным перегонам данного участка, мин;
п - станционный интервал попутного следования, мин;
н - коэффициент надёжности работы технических устройств (будем использовать н = 0,96 - при ПАБ; н = 0,92 - при ДЦ).
Величина интервала п определяется исходя из того, что при ПАБ на перегонах на прилегающих станциях, применяются маршрутно-контрольные устройства (МКУ).
Время хода поезда по перегону максимальной длины будем определять из выражения:
, мин, (3.3)
где lмах - максимальная длина перегона на участке, км;
Vгр - техническая скорость грузовых поездов, км /ч.
Наличная пропускная способность двухпутного перегона при АБ определяется для каждого пути по формуле (3.4):
, (3.4)
расчётных грузовых поездов в сутки,
где I - заданный расчетный межпоездной интервал попутного следования в пакете, мин.
Для определения возможности применения устройств ПАБ и АБ необходимо в соответствии с формулой (3.1) величины и сравнить с потребной пропускной способностью Nпотр.
В соответствии с заданными параметрами и характером движения потребная пропускная способность для каждого из путей двухпутного перегона определяется по формуле (3.5):
Nпотр = (Nгр+пасс * Nпасс) (3.5)
, расчетных грузовых поездов в сутки,
где = 1.1 - коэффициент, учитывающий необходимый запас пропускной способности двухпутных перегонов, при реальном неравномерном движении;
Nгp, Nпacc - заданное число грузовых и пассажирских поездов для каждого направления;
пасс - коэффициент, служащий для приведения пассажирских поездов к грузовым (для двух путных перегонов с ПАБ - пасс = 1,6; а с АБ- пасс = 1,8.
Выполним расчет по формулам (3.2, 3.3, 3.4, 3.5):




Согласно формуле 3.1 можно сделать вывод о том, что эффективнее является система АБ.
- Участковая скорость движения поездов на заданном двухпутном участке железной дороги
Технические мероприятия, проводимые по повышению пропускной способности железных дорог, обычно приводят к увеличению участковой скорости движения поездов, являющейся одним из основных показателей работы дороги. Повышения участковой скорости имеет большое народнохозяйственное значение, т.к. это позволяет:
1) ускорить доставку грузов;
2) снизить издержки перевозок;
3) уменьшить потребность в подвижном составе;
4) повысить производительность труда.
Под участковой скоростью понимается средняя скорость движения поездов в пределах заданного участка (в км/ч) с уче�том времени остановок на промежуточных станциях и потерь времени на разгоны и замедления.
Для приближенных расчетов участковой скорости движения грузовых поездов на двухпутных линиях, можно воспользоваться формулой:
, (3.6)
где Nгp - число грузовых поездов в одном направлении за сутки;
L - длина участка железной дороги, км;
- общее время хода грузовых поездов по двухпутному участку в обоих направлениях в течении суток, ч;
Тс = (RtОБГ+ tTH) - общее время стоянок грузовых поездов при обгонах их пассажирскими на участке за сутки, ч;
R - количество обгонов грузовых поездов пассажирскими в обоих направлениях в течении суток ;
tОБГ - среднее время продолжительности стоянки грузового поезда при обгоне его пассажирским поездом, ч;
tTH - среднее время стоянки грузовых поездов на промежуточных станциях по техническим надобностям (ориентировочно принимается: при ПАБ - tTH = 2ч; при АБ - tTH = 0.7), ч.
Если число пассажирских поездов, проходящих за сутки по двухпутному участку в каждом из направлений, равно Nпacc, то общее количество обгонов в обоих направлениях за сутки составит:
(3.7)

где Vпасс - техническая скорость пассажирских поездов, км/ч.
Среднее время продолжительности стоянки грузового поезда под обгоном может быть принято:
при ПАБ
,ч; (3.8)

При АБ
, ч, (3.9)

где lср- средняя длина перегона на участке, км;
п- станционный интервал попутного следования, мин;
I – интервал попутного следования, мин;
30, 60 – числовые коэффициенты, позволяющие использовать величины п, I в минутах, а величину tобг получать в часах.
Общее время хода грузовых поездов по участку в течение суток:
, ч. (3.10)
ч.
Общее время стоянок грузовых поездов при обгонах их пассажирскими поездами на участке за сутки:
При ПАБ
, ч; (3.11)

При АБ
, ч. (3.12)

Участковая скорость движения грузовых поездов:
При ПАБ
, км/ч; (3.13)
, км/ч;
При АБ
, км/ч; (3.14)
, км/ч;
Различие участковой скорости поездов для сравниваемых вариантов влечет за собой различную затрату поездо-часов на участке и различную потребность в подвижном составе.
Если в одном из сравниваемых вариантов участковая скорость оказалась больше скорости другого варианта, то количество поездо-часов, сбереженных за сутки, составит
. (3.15)

Выражению (3.15) соответствует количество сбереженных за сутки локомотиво-часов, откуда количество высвобождаемых локомотивов равно:
(3.16)

Число высвобождаемых вагонов зависит от средней величины состава поезда в осях m и составляет в четырехосных единицах:
, (3.17)

где m=200 – среднее число осей в составе.
Как показывают расчеты наибольшая участковая скорость движения поездов больше при АБ, следовательно применение АБ эффективнее, по сравнению с ПАБ.
3.4 Проектирование путевых устройств автоблокировки с рельсовыми цепями ограниченной длины.
- Задачи и этапы синтеза рельсовых цепей с изолирующими стыками
При проектировании путевых устройств автоблокировки необходимо осуществить синтез рельсовых цепей.
Предметом синтеза рельсовых цепей является расчет структуры рельсовой цепи по заданным режимам ее работы. Под расчетом структуры понимается оп�ределение таких обобщенных ее параметров, которые определяют специфиче�ские особенности проектируемой рельсовой цепи, заданной структурной схемой.
Для типовых рельсовых цепей постоянного тока обобщенными параметрами является следующий набор переменных:
{ R`вхн, Rвхк, l, rи}, где (3.18)
R`вхн, Rвхк – значение входных сопротивлений приемо-передающей аппаратуры по концам рельсовой линии рельсовой цепи постоянного тока;
l - длина рельсовой линии;
rи - сопротивление изоляции рельсовой линии.
При синтезе рельсовых цепей необходимо определить оптимальные значения обобщенных параметров структуры исследуемой рельсовой цепи, обеспечивающих выполнение нормального, шунтового и контрольного режимов работы, для необходимых условий эксплуатации.
Первая задача синтеза. Определение оптимальных значений параметров приемно-передающей аппаратуры проектируемой рельсовой цепи, которые обес�печивают выполнение нормального, шунтового и контрольного режимов при максимально допустимой (предельной) длине рельсовой линии (l = lmax).
Математически первая задача синтеза для типовых рельсовых цепей постоянного тока представляется соответственно в следующем виде:
max{l}=Ф1(R`вхн ,Rвхк ,l, rи); (3.19)
Вторая задача синтеза. Определение оптимальных значений параметров приемо-передающей аппаратуры, которые обеспечивают выполнение нормально�го, шунтового и контрольного режимов работы проектируемой рельсовой цепи заданной длины при минимально допустимом сопротивлении изоляции рельсо�вой линии rимин .
min{rи}=Ф2(R`вхн ,Rвхк ,l, rи). (3.20)
Для рельсовых цепей постоянного тока принимаем допущение, что:
R`вхн = Rвхк =Rвхо (3.21)
Принятые допущения сводят решение задачи синтеза к определению двух переменных lмаx, Rвхоopt (для рельсовых цепей постоянного тока). Определение двух переменных осуществляется на плоскости с использованием инженерных графоаналитических методов.
Таким образом, для определения искомых величин lмаx, Rвхоopt необходимо решить следующую систему из двух уравнений:
, (3.22)
где

Для рассматриваемых типовых рельсовых цепей постоянного тока эксплуатационные критерии безопасности определяются соответственно из следующих выражений:
(3.23)
; (3.24)
где - модуль сопротивления передачи основной схемы замещения типовых рельсовых цепей переменного тока в шунтовом режиме работы при наложении нормативного поездного шунта Rшн=0,06 Ом, в месте наихудшей шунтовой чувствительности и при условиях, наиболее неблагоприятных для шунтового режима;
- модуль сопротивления передач основной схемы замещения типовых рельсовых цепей переменного тока в нормальном режиме работы и при условиях, наиболее неблагоприятных для нормального режима;
- модуль сопротивления передачи основной схемы замещения типовых рельсовых цепей переменного тока в контрольном режиме работы и при условиях, наиболее неблагоприятных для контрольного режима;
N -аппаратурный коэффициент исследуемой рельсовой цепи (принимается N=1,7).
Тогда основная система уравнений для решения инженерной задачи синтеза типовых рельсовых цепей постоянного тока примет вид:
(3.25)
На практике синтез рельсовых цепей осуществляется в три этапа: абстрактный синтез, структурный синтез, параметрический синтез. При абстрактном синтезе решают ранее сформулированную задачу, то есть выбирают оптимальные значения входных сопротивлений приемо-передающей аппаратуры по концам рельсовой линии. При этом используют основную схему замещения рельсовых цепей. Методика решения этой задачи не зависит от вида рельсовой цепи, схемы устройств согласования в начале и конце рельсовой линии, а всецело определяется только учитываемыми режимами работы.
В курсовом проекте решаются задачи абстрактного синтеза типовых рель�совых цепей.
- Алгоритм синтеза рельсовых цепей с изолирующими стыками и методика определения оптимальных значений входных сопротивлений по концам рельсовой линии
Алгоритм синтеза рельсовой цепи предлагает определение оптимального модуля входных сопротивлений по концам рельсовой линии Rвхоopt по условиям обеспечения максимальной длины рельсовой линии lmax при заданном значении минимального сопротивления изоляции рельсовой линии rиmin и частоты сигнального тока f.
Структура одного из возможных алгоритмов абстрактного синтеза рельсовых цепей, реализующего инженерный графо-аналитический способ решения уравнений (3.25), изображена на рис. 3.1.
Рис. 3.1. Структура алгоритма абстрактного синтеза РЦ переменного и постоянного тока
Согласно алгоритму:
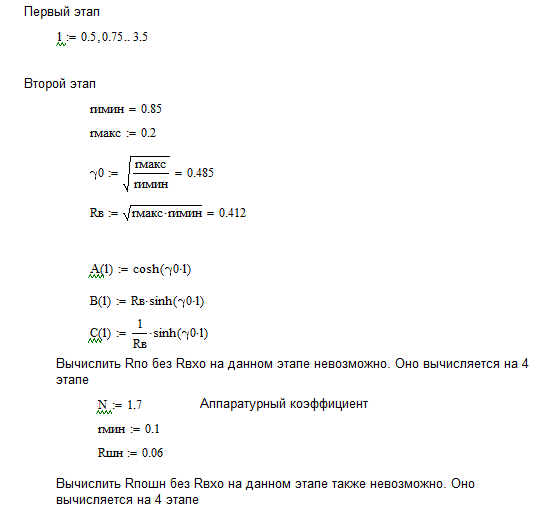
1 этап. Задаются различными длинами РЛ.
Пусть длина ln= 0,5+0,25*n км, где n = 0,1, …, 17.
2этап. Оперируют с первым уравнением системы (3.25), полученным при условии кшн=1.
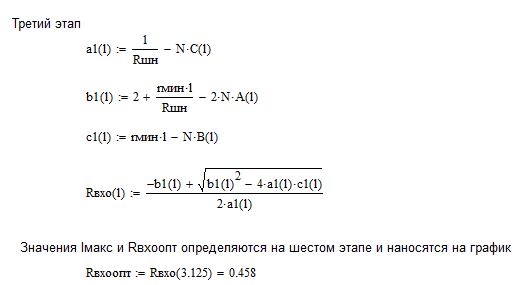
3 этап. Для каждого значения длины РЛ li определяются соответствующие этим длинам величины Riвхо. По результатам вычислений необходимо построить график функциональной зависимости Rвхо= f(l) из условий Кшн=1 (рис. 3.2).
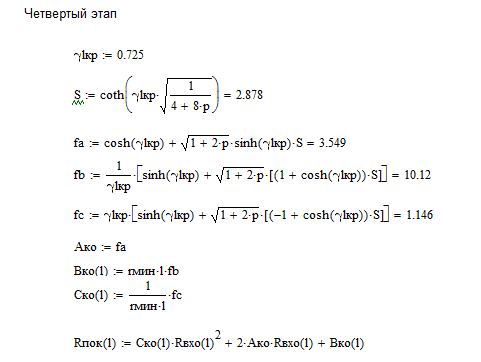
4 этап. Оперируют со вторым уравнением системы (3.25), полученными при условии Кор=1.
5 этап. Строятся графики функций f1=f(l) и f2=f(l). Условие Кор=1 выполняется при равенстве вспомогательных функций f1= f2. Координаты точки пересечения функций находятся графически. Координаты этой точки пересечения по оси абсцисс соответствуют максимально допустимой длине РЛ lmax, при которой выполняются оба условия Кшн=1и Кор=1 (рис. 3.3).
6 этап. После графического определения абсциссы lmax по рис. 3.3 она переносится на график рис. 3.2. по этому графику определяется ордината, соответствующая абсциссе lmax. Данная ордината и будет искомым значением модуля оптимальных входных сопротивлений по концам для РЦ переменного тока Rвхоopt
Расчет будем производить в программе Mathcad. Графики представлены на рисунках 3.2. и 3.3.Программа представлена в Приложении А.
- Разработка математической модели, организация вычислительного процесса на персональном компьютере и выводы по результатам синтеза рельсовых цепей ограниченной длины с заданными параметрами
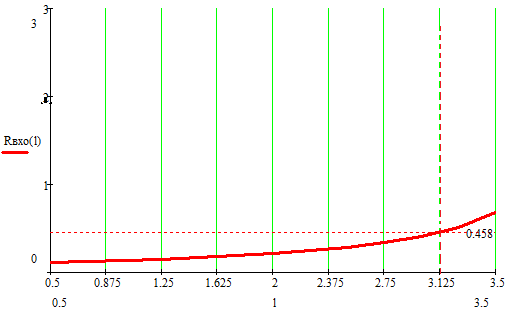
Рис.3.2 График зависимости
В соответствии с заданными значениями минимального сопротивления изоляции , аргумента входного сопротивления, поверхностной проводимости P и частоты сигнального тока f определена максимально допустимая длина рельсовой линии и модуль оптимального входного сопротивления по концам рельсовой линии вхоopt .
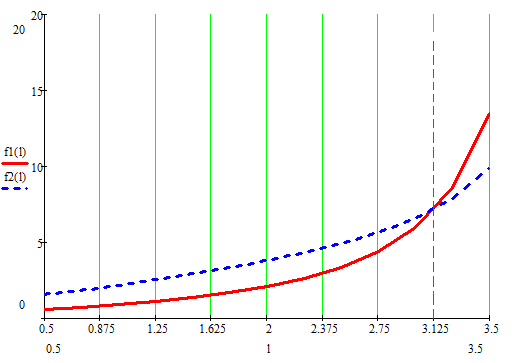
Рис.3.2 График зависимости и
3.5 Проектирование принципиальных схем путевых устройств, рассматриваемые системой интервального регулирования движения поездов для заданного двухпутного участка железной дороги
3.5.1 Схема двухпутной трехзначной автоблокировки постоянного тока для участков с двусторонним движением поездов
Состояние цепей схемы (рис.3.4) соответствует одностороннему движению поездов. Настроечными перемычками на сигнальных установках выключены реле Н и ПН, поэтому цепи для двустороннего движения отключены.
В провода ДСН-ОДСН выключены реле ДСН, которые переключают светофоры на режим двойного снижения напряжения.
Работа АБ при нахождении поезда на участке 3П протекает так. На сигнальной установке 1 (на схеме не показана) шунтируется и выключается реле И. Прекращается работа релейного дешифратора и выключаются реле ПИ, ПИ1, П, П1. Фронтовыми контактами реле П1 размыкается линейная цепь Л-ОЛ. На сигнальной установке светофора 3 выключается реле Л и вслед за ним реле С, С1.
Отпуская якорь, реле С1 выключает на светофоре 3 лампу зеленого огня и включает лампу красного огня. Контролирует горение лампы красного огня, включенный в цепь переменного тока, реле О. Реле КО остается возбужденным по цепи, проходящей через фронтовой контакт реле О, и тоже контролирует горение красного огня. Контакты реле КО использованы в цепях кодирования и диспетчерского контроля ЧДК.
С входного конца свободной РЦ 5П через контакт МТ подается импульсное питание, на выходном ее конце у светофора 3 в импульсном режиме работают реле И и И1. Через релейный дешифратор включаются реле ПИ, ПИ1, П, П1. Фронтовыми контактами реле П1 замыкается линейная цепь Л-ОЛ для питания реле Л светофора 5. Полностью эта цепь проходит от линейной батареи ПБЛ-МБЛ через фронтовые контакты реле О, тыловые контакты реле С и ПН. Линейное реле Л светофора 5 возбуждается током обратной полярности (ПБЛ подается на зажим 4,МБЛ- на зажим 1). Притягивая нейтральный якорь, реле Л включает реле С и С1 и, переключая поляризованный якорь, замыкает цепь питания лампы желтого огня светофора 5. Полностью Цепь переменного тока С-МС замыкается через фронтовые контакты реле ДСН и С1 и переведенный контакт поляризованного якоря реле Л. Горение лампы желтого огня контролируется возбуждением реле О, включенного последовательно с лампой. Одновременно сохраняется контроль целостности лампы красного огня в холодном состоянии. Для этого реле КО фронтовыми контактами реле С1 включается последовательно с лампой в цепь постоянного тока П-М.
При нахождении поезда на участке 3П и перегорании лампы красного огня на светофоре 3 выключается реле О и фронтовыми контактами размыкает линейную цепь реле Л светофора 5. Отпуская якорь, реле Л выключает реле С и С1, а последнее переключает на светофоре 5 желтый огонь на красный, чем осуществляется перенос красного огня на позади стоящий светофор при перегорании этого огня на впереди стоящем светофоре.
С входного конца свободной РЦ 7П через контакт МТ подается импульсное питание. На выходном конце РЦ 7П у светофора 5 в импульсном режиме работают реле И, И1. Через релейный дешифратор возбуждается реле ПИ, ПИ1, П, П1. Фронтовыми контактами реле П1 замыкается линейная цепь Л-ОЛ питание реле Л светофора 7. Линей ная цепь переходит от батареи ПБЛ-МБЛ через фронтовые контакты реле О и С и тыловые контакты реле ПН, чем устанавливается прямая полярность тока питания реле Л (ПБЛ на зажим 1, МБЛ на зажим 4). Притягивая нейтральный якорь реле Л включает реле С и С1, а переключая поляризованный якорь, замыкает цепь питания лампы зеленого огня.
Цепь переменного тока С-МС питание лампы зеленого огня замыкается фронтовыми контактами реле ДСН и С1, тыловым контактом реле ПН и нормальным контактом поляризованного якоря реле Л. Горение лампы зеленого огня контролируется возбуждением реле О. включенного последовательно с лампой. Целостность нити ламп красного огня в холодном состоянии контролирует реле КО. В случае перегорания лампы желтого огня на светофоре выключается реле О светофора. Отпуская якорь и переключая фронтовые контакты на тыловые в линейной цепи, оно меняет полярность тока питания реле Л светофора 7 с прямой на обратную. Реле Л, переключая контакт поляризованного якоря в переведенное положение, отключает лампу зеленого огня и включает лампу желтого огня, чем производится перенос желтого огня на позади стоящий светофор при перегорании этого огня на впереди стоящем светофоре.
При свободном состоянии РЦ 9П у светофора 7 в импульсном режиме работают реле И, И1, через релейный дешифратор возбуждены реле П, П1, ПИ, ПИ1. Фронтовыми контактами реле П1, С, О замкнута линейная цепь Л-ОЛ, по которой током прямой полярности возбуждено реле Л светофора 9 (на схеме не показана). Контактами реле Л и С1 на светофоре 9 включен зеленый огонь.
В случае перегорания лампы зеленого огня на светофоре 7 выключается реле О. Переключая контакты, оно меняет полярность тока с прямой на обратную в линейной цепи, от чего на светофоре 9 выключается зеленый огонь и включается желтый. Работа цепей при дальнейшем следовании поезда происходит аналогично вышеописанной.
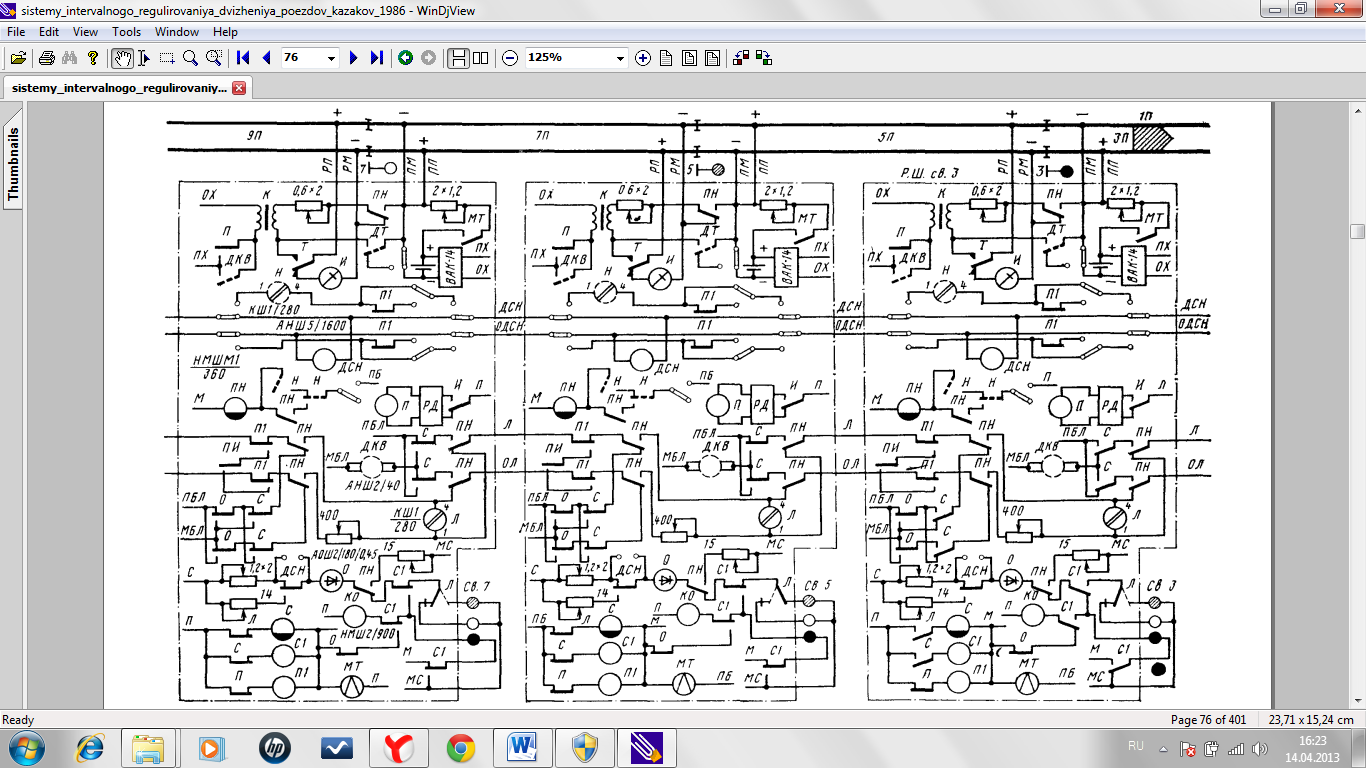
Рис.3.4 Схема двухпутной трехзначной автоблокировки постоянного тока для участков с двусторонним движением поездов
- Схема управления автоматической переездной сигнализацией на двухпутном участке с децентрализованной автоблокировкой постоянного тока
В схеме (рис. 3.6) для включения и выключения переездной сигнализации, а также образования участка извещения рельсовую цепь блок-участка, на котором расположен переезд, делают разрезной с местом разреза на переезде. Это дает возможность открывать переезд сразу после проследования по нему поезда. В полную схему автоматической переездной сигнализации(АПС) входят схемы диспетчерского контроля, служащие для передачи информации о состоянии переездных устройств на ближайшую станцию. Схема управления светофорной сигнализацией для нечетного пути двухпутного перегона указана на рис. . В АПС включают следующие реле: НП (АНШ2-720) – путевое, включенное через релейный дешифратор; НДП (АНШ5-1600) – дополнительное путевое; НДП1 (НМШ2-900) – повторитель реле НДП; НТ (ТШ-65) – трансмиттерное; НДТ (НМПШ2-400) – дополнительное трансмиттерное; НИ (ИМШ1-0,3) – импульсное путевое; НИ1, НИ2 (ИМШ1-1700) – повторители импульсного путевого реле; НИТ (ИМВШ-110) импульсное трансляционное; НДИ (ИМВШ-110) – дополнительное импульсное путевое; НДКВ (АНШ2-40) – дополнительное кодовое включающее; ДМТ (МТ1) – дополнительный маятниковый трансмиттер; НИП (НМШ2-900) – известитель приближения; НИП1 (АНШМ2-380) – повторитель реле извещения; НВ (АНШ5-1600) – выключающее; НКТ (АНШМТ-380) – контрольное термическое.
При свободном состоянии рельсо�вой цепи 5П с ее питающего конца через контакт трансмиттера МТ по�даются импульсы постоянного тока. На переезде от этих импульсов рабо�тает реле НИ, включенное в рельсо�вую цепь 5П через тыловые контакты реле НТ и НДКВ. Через контакт реле НИ в импульсном режиме работают его повторители реле НИ1 и НИ2. Переключая свой контакт, реле НИ2 транслирует импульсы постоянного тока в рельсовую цепь 5Па. От этих импульсов у светофора 3 работает ре�ле И. Работая в импульсном режиме, реле НИ на переезде н реле И у све�тофора 3 через релейные дешифраторы возбуждают реле НП, П1 и ПИ, чем контролируется свободное состояние блок-участка между светофорами 3 и 5.
При вступлении поезда на рельсо�вую цепь 5/7 участка приближения на переезде прекращается импульсная работа реле НИ и его повторителей, через РД выключаются реле НП, НДП и НДП1. Отпуская якорь, реле НП выключает известительное реле НИП, вслед за которым выключается реле НИП1. Фронтовым контактом реле НИП1 выключается реле НВ. По�следнее, отпуская якорь, включает переездную сигнализацию и закры�вает автошлагбаумы (см. рис. 8.4 и 8.5).Для закрытия переезда при на�хождении поезда за два участка при�ближения снимают перемычки П. В этом случае реле НИП включается по цепи извещения НИ-НОИ через фронтовые контакты реле П1 блок- участка 7П. С момента вступления поезда на этот блок-участок реле НИП выключается контактами реле П1, после чего в том же порядке, как и при извещении за один участок, пе�реезд закрывается.Если фактическая длина участка приближения больше расчетной, то вводят задержку на закрытие пере�езда. Для этого к реле НВ через его фронтовой контакт подключен блок конденсаторов для создания замедле�ния на отпускание. При определении времени замедления реле НВ прини�мают, что конденсатор емкостью 1000 мкФ обеспечивает замедление на от�пускание якоря реле примерно 4 с.
Во время движения поезда по участку приближения 5П от свето�фора 3 в рельсовую цепь 5Па подают�ся коды АЛС. На переезде от кодовых импульсов работает реле НИТ и его повторитель реле НТ, которое транс�лирует кодовые импульсы в рельсо�вую цепь 5П.В схеме АПС применена защита от ложного открытия переезда при кратковременной потере шунта под поездом, движущимся по участку при�ближения. Для выполнения этой за�щиты применены реле НИП1 и НКТ. Реле НКТ, кроме основной обмотки, имеет термоэлемент, который при включении тока нагрева замыкает фронтовой контакт через 8—10 с. Схема включения реле НИП1 по�строена так, что каждое возбуждение этого реле происходит с выдержкой времени 8—10 с по цепи, проходя�щей через фронтовой контакт реле НКТ. Основная обмотка реле НКТ включена через тыловой контакт тер�моэлемента, отчего возбуждение реле возможно только после полного осты�вания термоэлемента.
При потере шунта начинает рабо�тать реле НИ и через РД включает�ся реле НП, а вслед за ним реле НИП. Однако реле НИП1 не возбуждает�ся, так как сначала образуется цепь питания реле НКТ, проходящая че�рез тыловой контакт термоэлемента НКТЭ. Фронтовым контактом реле НКТ замыкается цепь термоэлемен�та.
Открытие переезда после освобож�дения участка приближения 5П про�исходит в следующем порядке. От импульсов постоянного тока возоб�новляется работа реле НИ, НИ 1 и НИ2; через РД возбуждаются реле НП, НДП и НДП1. После срабаты�вания реле НП возбуждается реле НИП и включает реле НКТ. С этого момента происходит нагрев термоэле�мента НКТЭ, а после окончания пол�ного нагрева замыкается цепь сраба�тывания, а затем цепь самоблокиров�ки реле НИП1.
Притягивая якорь, реле НИП1 са�моблокируется, отключает термоэле�мент и включает реле НВ — переезд открывается. После освобождения участка уда�ления начинается трансляция импуль�сов постоянного тока в рельсовую цепь 5а. У светофора 3 срабатывают реле П и ПИ1.Реле П отключает цепи кодирования.
Для трансляции кодов применяют реле НДКВ, ИДИ, НДТ и маятни�ковый трансмиттер ДМТ. Приборы, которые устанавливают только на пе�риод двустороннего движения, пока�заны на схеме штриховыми линиями. В цепи реле НДКВ контакт ЗГ вклю�чают на переездах, оборудованных ав�тошлагбаумами; на переездах со све�тофорной сигнализацией устанавли�вают перемычки.
Для переключения на неправиль�ное направление движения исполь�зуют схему изменения направления движения. По цепям этой схемы реле направления Н всех сигнальных уста�новок и на переезде возбуждают током обратной полярности. Переключая по�ляризованные якори, реле Н Вклю�чают реле ПН, которые производят все необходимые переключения в схемах. После переключения на неправиль�ное направление движения при от�сутствии поезда на блок-участке 5П на сигнальной установке 5 через кон�такт МТ в рельсовую цепь 5П по�даются импульсы постоянного тока. От этих импульсов на переезде рабо�тают реле НИ и его повторители НИ1 и НИ2. Реле НИ2 транслирует им�пульсы постоянного тока в рельсовую цепь 5Па. Одновременно с этим через контакт реле НИ работает релейный дешифратор, через который возбужда�ется реле НП, а затем его повторите�ли НДП и НДП1. Реле НДИ, НИТ, НДКВ, НДТ и ДМТ выключены. У светофора 3 при импульсной работе реле И через релейный дешифратор включаются реле П1, ПИ и ПИ1.
При вступлении поезда на рельсо�вую цепь 5Па у светофора 3 прекра�щается импульсная работа реле И и выключаются реле П1, ПИ и ПИ1. Тыловыми контактами реле П1 и ПИ шунтируется линейная цепь Л-ОЛ, отчего на сигнальной установке 5 и на переезде срабатывают реле ДКВ и И ДКВ, включенные в эту цепь по�следовательно. У светофора 5 фрон�товым контактом реле ДКВ замыка�ется цепь кодирования, в которую включено трансмиттерное реле ДТ. Выбор цепи кодирования кодом КЖ, Ж или 3 в зависимости от числа сво�бодных блок-участков производится контактами реле Л а С. Реле ДТ, ра�ботая в режиме одного из кодов и переключая свой контакт в цепи транс�форматора К, передает этот код в рельсовую цепь 5/7. В интервалах им�пульсов кода в эту рельсовую цепь продолжают поступать импульсы по�стоянного тока.
На переезде фронтовым контактом реле НДКВ в рельсовую цепь 5/7 подключено дополнительное импульс�ное путевое реле ИДИ, а тыловым кон�тактом отключено реле НИ. Работая в режиме поступающего кода, реле ИДИ включает свой повторитель реле НДТ. Последнее, переключая свой контакт в цепи трансформатора НК, транслирует кодовые импульсы в рель�совую цепь 5Па. Фронтовыми кон�тактами реле НДКВ включаются реле ДМТ и НИ2. Реле НИ2, повторяя работу реле НДТ, подает в рельсо�вую цепь 5Па импульсы постоянного тока. Эти импульсы проходят в рель�совую цепь только в интервалах им�пульсов кодового тока через тыловой контакт реле НДТ.
Для защиты от импульсов постоян�ного тока реле НДИ включено через защитный фильтр НФ. При работе реле НДИ и НДТ в кодовом режиме через конденсаторный блок КБМШ в возбужденном состоянии остаются реле НДП и его повторитель НДП1. За счет разряда конденсаторов блока КБМШ обеспечивается достаточное замедление для удержания якоря реле НДП в интервалах кода, чем конт�ролируется свободность рельсовой цепи 5П. Фронтовыми контактами ре�ле НДП1 линейная цепь сохраняет�ся замкнутой на все время следова�ния поезда по участку 5Па.
С момента вступления поезда на рельсовую цепь 5/7 прекращается им�пульсная работа реле НДИ и НДТ, выключаются реле НДП и НДП1. Отпуская якорь, реле НДП1 выклю�чает из линейной цепи реле НДКВ. Тыловыми контактами реле НДП1 и НПИ линейная цепь замыкается только для возбуждения реле ДКВ светофора 5. Реле НДКВ, отпуская якорь, выключает цепи питания реле НДИ, НИ2 и ДМТ, также выключа�ется и реле НДТ. После этого прекра�щается подача кодов АЛС и импульсов постоянного тока в рельсовую цепь 5Па. Рельсовая цепь 5П продолжает кодироваться, в нее также подают�ся импульсы постоянного тока. При полном освобождении участ�ка 5Па и движении поезда по участ�ку 5П состояние цепей схемы не изме�няется.
С момента полного освобождения участка 5П в рельсовую цепь этого участка в интервалах кода КЖ посту�пают импульсы постоянного тока. На переезде от этих импульсов в импульс�ном режиме работают реле НИ, НИ1 и НИ2. По цепям дешифрации воз�буждаются реле НП, а затем его пов�торители НДП и НДП1. Работая в импульсном режиме, реле НИ2 транс�лирует импульсы постоянного тока в рельсовую цепь 5Па. От этих им�пульсов у светофора 3 в импульсном режиме работает реле И. По цепям дешифрации возбуждаются реле П1, ПИ и ПИ1. Контактами реле П1 у светофора 3 и реле НДП 1 на пере�езде снимается шунтирование с ли�нейной цепи Л-ОЛ. Выключаются реле ДКВ и НДКВ и выключаются цепи кодирования участка 5Л; сохраняется только им�пульсное питание рельсовых цепей этого участка. Необходимость посылки импуль�сов постоянного тока одновременно с кодовыми импульсами в занятую рель�совую цепь 5Па объясняется следую�щим. Если посылка импульсов по�стоянного тока не происходит, то при отсутствии поезда на блок-участке и наложении и снятии шунта с рельсо�вой цепи 5Па кодирование этой рель�совой цепи не отключается. В рель�совые цепи 5П и 5Па будут подавать�ся коды АЛС. Отключение кодирова�ния и сохранение нормального им�пульсного питания рельсовых цепей произойдет только после полного ос�вобождения поездом блок-участка или при вмешательстве электромеханика.
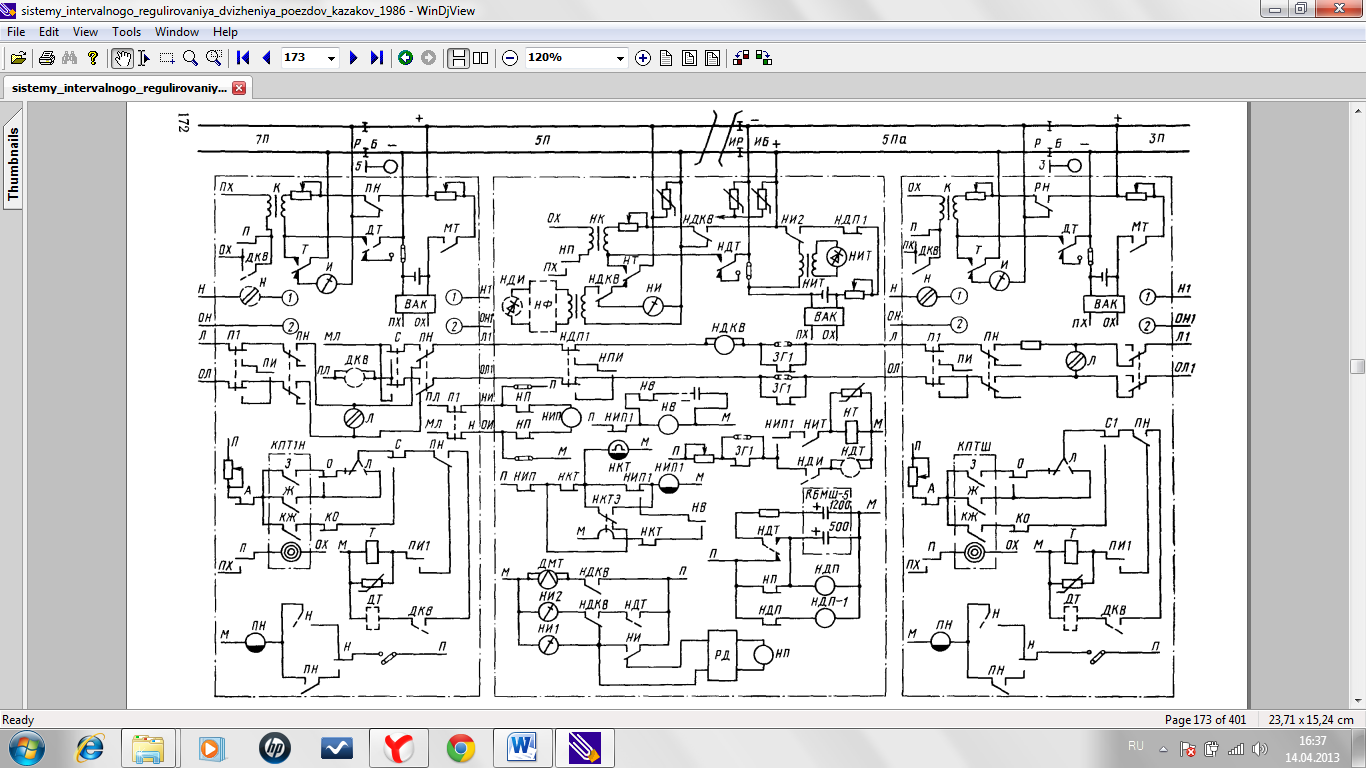
Рис.3.6 Схема управления переездной сигнализацией при двухпутной автоблокировке постоянного тока
ЗАКЛЮЧЕНИЕ
В курсовом проекте на тему «Проектирование путевых устройств системы интервального регулирования движения поездов на перегонах двухпутного участка железной дороги при тепловозной тяге» получены следующие основные результаты:
- Определены необходимость разработки, требования и основные задачи, решаемы системой ИРДП;
- Рассмотрены перегонные системы обеспечения безопасности движения поездов на традиционной релейной элементной базе;
- Рассмотрены частотные системы обеспечения безопасности движения поездов на перегоне;
- Рассмотрены электронные системы обеспечения безопасности движения поездов на перегоне;
- Рассмотрен единый ряд микроэлектронных и микропроцессорных систем обеспечения безопасности движения поездов на перегоне;
- Определены эксплуатационно-технические основы проектируемой системы интервального регулирования движения поездов на релейной элементной базе для заданного двухпутного участка железной дороги
- Проведено обоснование необходимости применения системы двухпутной автоблокировки с двусторонним движением поездов по каждому из пути;
- Определена эффективность проектируемой системы интервального регулирования движения поездов на релейной элементной базе для заданного двухпутного участка железной дороги;
- Рассчитана участковая скорость движения поездов на двухпутном участке железной дороги;
- Определена пропускная способность двухпутных перегонов;
- Определены оптимальные значения входного сопротивления по концам рельсовой линии и максимально допустимая длина рельсовой линии;
- Спроектирована схема двухпутной трехзначной автоблокировки постоянного тока для участков с двусторонним движением поездов; схема увязки двухпутной трехзначной автоблокировки постоянного тока со станционными устройствами; схема управления автоматической переездной сигнализацией на двухпутных участках с автоблокировкой постоянного тока.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Кузнецов В.С., Линьков В.И. Проектирование путевых устройств систем интрвального регулирования движения поездов. Часть III: методические указания к курсовому проектированию по дисциплине «Микроэлектронные системы интервального регулирования движения поездов». – М.: МИИТ, 2012. – 40 с.
2. Лисенков В.М., Шаманов В.И., Шелухин В.И. Работа над дипломным проектом по системам железнодорожной автоматики и телемеханики: Учебное пособие для ВУЗов ж.-д. трансп. – М.: МИИТ, 2011. – 283 с.
3. Системы управления движением поездов на перегонах: Учебник для ВУЗов ж.-д. транспорта: В 3ч. Ч.1 / В.М. Лисенков, П.Ф. Бестемьянов, В.Б. Леушин и др.; Под ред. В.М. Лисенкова. – М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2009. – 161 с.
4. Системы управления движением поездов на перегонах: Учебник для ВУЗов ж.-д. транспорта: В 3ч. Ч.2 / В.М. Лисенков, П.Ф. Бестемьянов, В.Б. Леушин, А.В. Лисенков, А.Е. Ваньшин; Под ред. В.М. Лисенкова. – М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте»,
2009. – 324 с.
5. Перегонные системы автоматики и телемеханики: Учебник для техникумов и колледжей ж.-д. транспорта / В.Ю. Виноградова, В.А. Воронин, Е.А. Казаков, Д.В. Швалов, Е.Е. Шухина; Под ред. В.Ю. Виноградова. – М.: Маршрут, 2005. – 292 с.
6. Казаков А.А., Бубнов В.Д., Казаков Е.А. Автоматизированные системы интервального регулирования движения поездов: Учеб. для техникумов ж.-д. трансп. – М.: Транспорт, 1995. – 320 с.
7. Автоматика и телемеханика на железнодорожном транспорте: учеб. пособие / В.В. Сапожников и др.; под ред. В.В. Сапожникова. – М.: ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2011. – 288 с.
8. Системы железнодорожной автоматики, телемеханики и связи: учебник в 2ч./А.В, Горелик, Д.В. Шалягин, Ю.Г. Боровиков, В.Е. Митрохин и др.; под ред. А.В. Горелика. – М.: ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2012. – 477 с.
9. Лисенков В.М. Методы анализа и синтеза рельсовых цепей (статистический подход). – М.: ВИНИТИ РАН, 2014. – 202 с.
10. Федоров Н.Е. Современные системы автоблокировки с тональными рельсовыми цепями: Учебное пособие. – Самара: СамГАПС, 2004. – 132 с.
11. Аркатов В.С., Кравцов Ю.А., Степенский Б.М. Рельсовые цепи. Анализ работы и техническое обслуживание. – М.: Транспорт, 1990. – 295 с.
12. Сороко В.И. Реле железнодорожной автоматики и телемеханики. – М.: НПФ «Планета», 2002. – 696 с.
Приложение А. Организация вычислительного процесса на персональном компьютере для синтеза рельсовой цепи ограниченной длины с заданными параметрами

ПРОЕКТИРОВАНИЕ ПУТЕВЫХ УСТРОЙСТВ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ НА ПЕРЕГОНАХ ДВУХПУТНОГО УЧАСТКА ЖЕЛЕЗНОЙ ДОРОГИ ПРИ ТЕПЛОВОЗНОЙ ТЯГЕ