Цилиндрическая передача, составленная из колес с косыми зубьями
Лекция N16
Цилиндрическая передача, составленная из
колес с косыми зубьями.
Переходя к изучению косозубых передач, отметим прежде всего, что косые зубья располагаются на цилиндрах обоих колес по винтовым линиям (рис. 16.1). Если цилиндры развернуть на плоскость, то косые зубья (на развертке) окажутся расположенными по наклон�ным параллельным прямым. Так же будут расположены и косые зубья рейки.

Косозубые колеса, как и прямозубые, изготовляются способом обкатки (см лекцию 14), в основу которого положен процесс станочного зацепления. Для нарезания применяется тот же стандартный инструмент, но устанавливается он на станке наклонно, под углом (рис. 16.2). Поэтому производящая зубчатая поверхность, которую в своем технологическом движении 3 описывают режущие кромки инструмента — гребенки Г, тоже будет наклонной. На рис. 16.2: производящая поверхность показана схематично в виде наклонно проецирующих линий. А так как эта поверхность (если ее мысленно сделать материальной) образует зубья воображаемой производящей рейки ПР то, следовательно, зубья рейки получатся косыми. Наглядно процесс обкатки можно представить себе как качение изготовляемого колеса по производящей рейке ПР, имеющей косые зубья, наклоненные под углом .
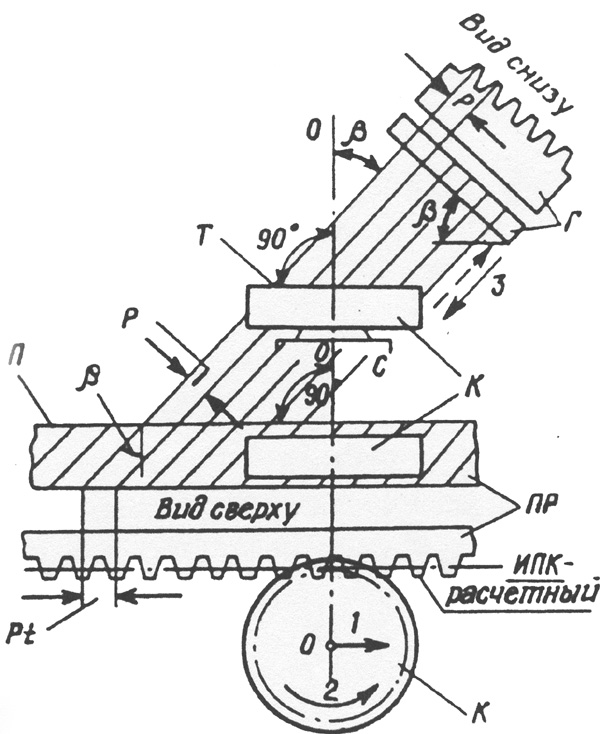
Такой же наклон получат зубья изготовляемого колеса на его станочно-начальном цилиндре. А так как в реечном станочном зацеплении делительный цилиндр совпадает со станочно-начальным, то именно на делительном цилиндре зубья получатся расположенными под углом (см. рис. 16.1), на который наклонен инструмент на станке.
Из сравнения рис. 16.1 и 16.2 видно, что движения обката 1 и 2 при изготовлении как прямозубых, так и косозубых колес одинаковы. А отсюда следует весьма важный вывод: все принципиальные положения, касающиеся станочного зацепления прямозубого колеса с прямозубой производящей рейкой
(см. лекцию 14), справедливы также для станочного зацепления косозубого колеса с косозубой производящей рейкой.
Вместе с тем процесс изготовления косозубых колес имеет и свои особенности, вытекающие из того, что инструмент установлен на станке наклонно. Определим, каким будет в этих новых условиях исходный производящий контур (ИПК), вступающий в станочное зацепление с профилем нарезаемых зубьев. Для этого рассечем наклонную зубчатую производящую поверхность плоскостью , перпендикулярной оси 00 колеса; в сечении получим искомый ИПК.
Нетрудно заметить, что благодаря наклону инструмента параметры полученного ИПК будут отличаться от параметров стандартного ИПК, который образуется при пересечении производящей поверхности плоскостью , ей перпендикулярной. Например, шаг pt нового ИПК составит pt = p/cos (рис. 16.2), где р - шаг стандартного ИПК. Поэтому mt = m/cos , где m -стандартный модуль инструмента. Чтобы в дальнейшем отличать стандартные параметры m, , h*a, c* от расчетных, будем присваивать последним значок t: mt, t, h*at, c*t. Следовательно, особенность станочного зацепления при изготовлении косозубых колес состоит в том, что благодаря наклонной установке инструмента ИПК не является больше стандартным, а становится расчетным.
Здесь надо сделать принципиально важное добавление. Расчетный реечный ИПК (рис. 16.2), как и стандартный, имеет прямолинейные, т. е. эвольвентные, кромки. Поэтому в торцевой плоскости Т косозубого колеса (рис. 16.2) как и в любой, ей параллельной, зубья при изготовлении получают эвольвентный профиль. Но именно в этих плоскостях, перпендикулярных осям вращения колес проектируемой передачи, и происходит сам процесс зацепления профилей ее зубьев. Значит, косозубая цилиндрическая передача является эвольвентной передачей. Отсюда следует еще один важный вывод: все теоретические положения и зависимости, полученные ранее для прямозубой эвольвентной передачи полностью справедливы и для косозубой, но сформированной на базе расчетного ИПК. Поэтому математическая структура всех ранее составленных формул сохранится, но написание их будет иметь ту особенность, что всюду вместо стандартных параметров m, , h*a, c* в них надо подставлять расчетные параметры mt, t, h*at, c*t, зависящие от угла . Например:
|
прямозубая передача:
|
косозубая передача:
|
и т.п.
Укажем (без вывода) формулы перехода от стандартных параметров к расчётным:
, , , (16.1)
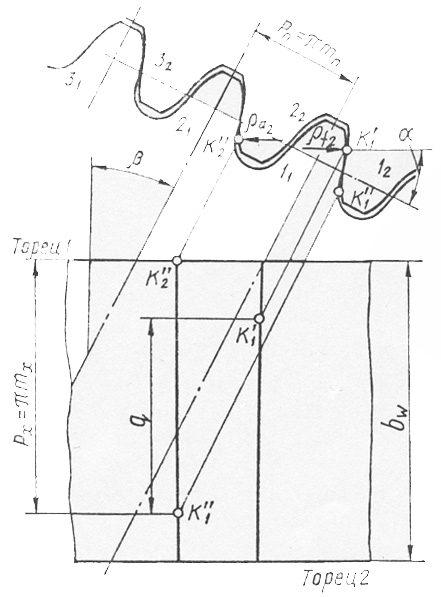
Косое направление зубьев наделяет цилиндрическую передачу особыми свойствами. Рассмотрим их. Благодаря наклону зуба он выходит из зацепления не сразу весь целиком, а постепенно. После того как профиль Эа выйдет из зацепления, шестерня 1 повернется еще на угол 1. до момента выхода из зацепления профиля Эс (см. рис. 16.2). Продолжительность зацепления одной пары зубьев в косозубой передаче большая, чем в прямозубой, в которой зуб выходит из зацепления одновременно по всей своей длине. Поэтому угол поворота 1 шестерни 1 за время полного зацепления одной пары косых зубьев составит уже не 1, как в зацеплении прямых зубьев, a
1 = 1 + 1
Коэффициентом перекрытия косозубой передачи называют отношение = 1/1 = 2/2. Раскроем его:
= 1/1 = 1/1 + 1/1 = +
Слагаемое , называемое коэффициентом торцевого перекрытия, одсчитается по уравнению (15.8). Слагаемое - коэффициент осевого перекрытия - определяется так: = 1/1 = A’C/AE = btg/pt (рис. 16.1)’
Подставив рt = mt получим:
(16.2)1
Теперь окончательно запишем формулу для определения коэффициента перекрытия косозубой передачи :
(16.3)
В прямозубой передаче (где = 0) коэффициент осевого перекрытия , так что = . Следовательно, коэффициент перекрытия косозубой передачи (где 0) больше, а иногда и значительно больше коэффициента перекрытия прямозубой, что является достоинством косозубой передачи. Проф. Л. Н. Решетов рекомендует угол назначать так, чтобы получить для целое значение: 1, реже 2; это уменьшит износ зубьев.
Для косозубых колес уравнение (15.) приобретает вид:
Так как, согласно формулам (15.) h*at < h*a, t > , zкосmin < zmin, т. е. косозубые колеса менее подвержены подрезанию, чем прямозубые.
Л. Н. Решетов рассчитал и изготовил косозубую передачу, шестерня которой имеет вceгo один не пораженный подрезом зуб. Этим он наглядно и убедительно продемонстрировал возможность создания малогабаритных зубчатых передач (в том числе и прямозубых) путем снижения чисел зубьев менее zmin, не опасаясь их подрезания.
В лекциях 13…16 была кратко изложена геометрическая теория цилиндрической эвольвентной зубчатой передачи, которую с исчерпывающей полнотой разработал проф. В. А. Гавриленко [13] - основатель научной школы по зубчатым передачам.
Особенности точечного круговинтового зацепления Новикова.
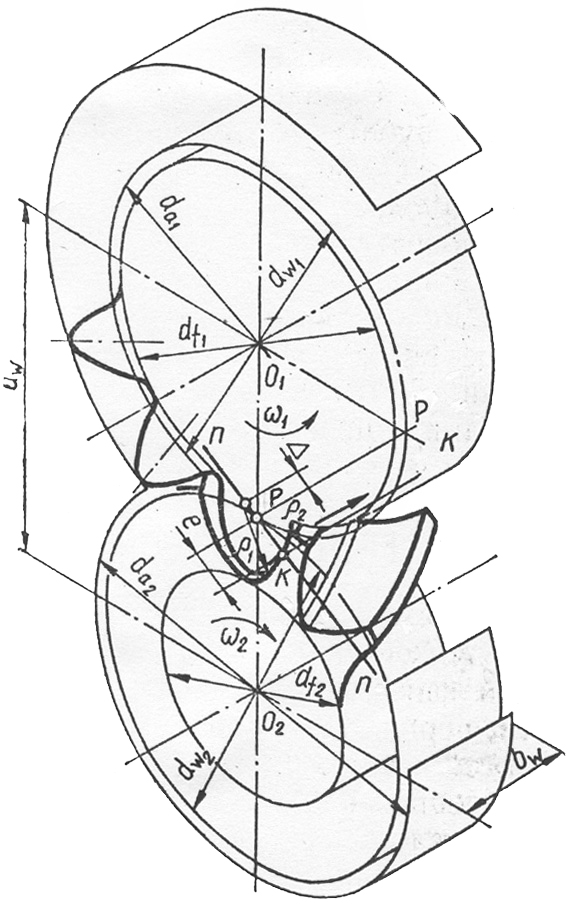
В эвольвентном зацеплении взаимодействие рабочих поверхностей зубьев происходит по прямой линии. Поэтому неточность взаимного расположения колес и их деформации под нагрузкой приводят к концентрации напряжений на определенных участках контактных линий. Для того, чтобы увеличить нагрузочную способность зацепления необходимо увеличить радиусы кривизны рабочих поверхностей зубьев, т.е. увеличить диаметры зубчатых колес. Для устранения указанных недостатков эвольвентных передач М.Л. Новиков предложил способы образования сопряженных поверхностей зубьев, имеющих точечный контакт. Им разработаны и реализованы на практике цилиндрические передачи, в которых выпуклые поверхности начальных головок зубьев одного колеса взаимодействуют с вогнутыми поверхностями начальных ножек зубьев другого колеса (рис. 16.3). Такие колеса образуют зацепление Новикова с одной линией зацепления.
В отличие от цилиндрических эвольвентных передач начальный контакт таких криволинейных поверхностей зубьев осуществляется лишь в одной точке К на линии зацепления КК, расположенной параллельно осям колес и полюсной линии PP. Линия зацепления процируется на торцевую плоскость в точку К; поля зацепления в этих пределах не существует. Так как начальный контакт зубьев осуществляется в одной точке ( = 0), то для обеспечения непрерывности зацепления передачи Новикова выполняются только косозубыми ( = 822) с коэффициентом осевого перекрытия > 1.
Другое отличие передачи Новикова от эвольвентных состоит в том, что перекатывание зубьев в процессе зацепления происходит не по высоте, а по их длине (направление перемещения точки К на рис. 16.3 показано стрелкой) и скорость перемещения точки начального контакта значительно больше ее окружной скорости. Последнее способствует образованию в контакте относительно толстого гидродинамического масляного слоя, снижению потерь на трение и уменьшению износа. В действительности из-за упругой контактной деформации зубьев под нагрузкой их взаимодействие происходит через площадку, размеры которой быстро увеличиваются в результате приработки.
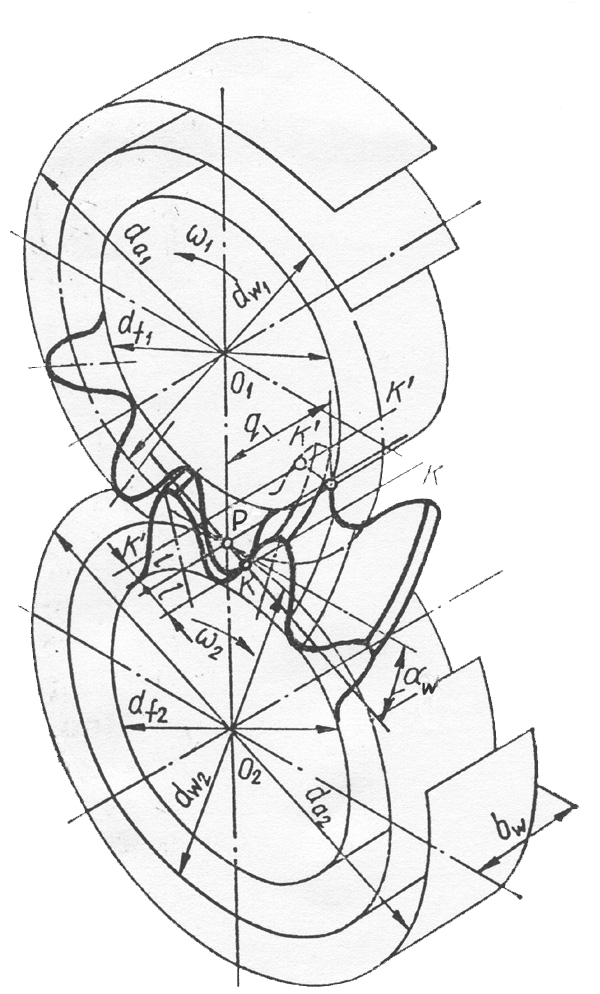
С целью увеличения нагрузочной способности зацепления Новикова круговинтовые зубья на каждом колесе выполняют таким образом, чтобы головки зубьев обоих колес были выпуклыми, а ножки - вогнутыми, а связаны между собой небольшим участком, очерченным переходной кривой. Такие передачи имеют две линии зацепления КК и К'К' расположенные параллельно осям вращения колес и полюсной линии (рис. 16.4). Одна линия зацепления К'К' находится перед полюсом P другая КК - за полюсом. Каждая линия зацепления образуется перемещением общей точки контакта начальной ножки зуба одного зубчатого колеса с начальной головкой зуба парного колеса. Этот вариант зацепления Новикова с двумя линиями зацепления называется дозаполюсным.
Геометрия зубьев зацепления Новикова определяется исходным контуром зацепления. Параметры элементов исходных контуров, радиусы кривизны и другие размеры зубьев выбираются в таких соотношениях, чтобы обеспечить наивыгоднейшие условия работы зацепления и требуемую прочность зубьев. Для зацепления Новикова с одной линией зацепления (рис. 16.5, а) необходимы два исходных контура: один для выпуклых, другой для вогнутых зубьев. Боковые стороны контура очерчены дугами окружности. Исходные контуры выпуклого и вогнутого профилей (контур зубьев рейки) по делительной прямой а-а образуют плотное сопряжение. Необходимый боковой зазор в зацеплении достигается за счет утонения зубьев выпуклого зуба.
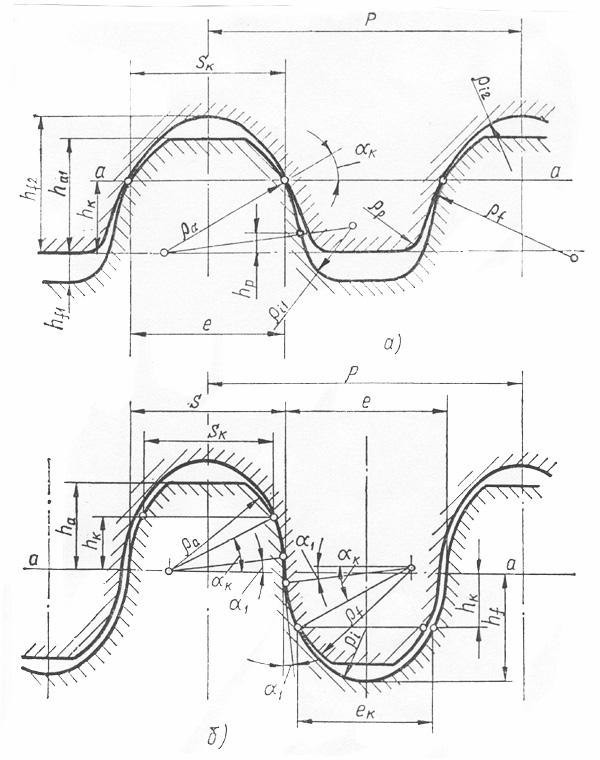
Параметры исходного контура зацеплений Новикова с двумя линиями зацепления (рис. 16.5, б) регламентируется ГОСТ 15023-76. Как и в исходном контуре с одной линией зацепления, профили зубьев в нормальном сечении очерчены дугами окружности и сопрягаются между собой прямолинейным участком. Геометрические параметры определяются через нормальный модуль mn.
Модули зацепления выбирают в соответствии со значениями, установленными ГОСТ 14186-69.
Непрерывность вращения ведомого колеса в зубчатом механизме с зацеплением Новикова обеспечивается за счет осевого перекрытия. Коэффициент осевого перекрытия определяется отношением рабочей ширины зацепления bw к осевому шагу px (см. рис. 16.6):
(16.3)
В механизме с одной линией зацепления в контакте будут находиться, то одна, то две пары зубьев. Двухпарное зацепление будет иметь место на участках зубьев, имеющих длину (bw - mn), расположенных в близи торцов. Для обеспечения необходимого коэффициента перекрытия = 1.15 ... 1.35 чаще всего принимают углы наклона зубьев = 10. . .20°.
В дозаполюсном зацеплении при коэффициенте перекрытия = 1.15... 1.2 обеспечивается как минимум две зоны контакта. Это позволяет ширину зубчатых венцов делать на 30. . .40% меньше, чем в зацеплении с одной линией зацепления.
При проектировании зубчатого механизма с круговинтовыми зубьями и параллельными осями вращения задаются межосевым расстоянием , передаточным отношением U12 и вариантом зацепления. Формулы для определения основных размеров передач Новикова и эвольвентных косозубых передач совпадают.
Диаметр делительного цилиндра, совпадающего с начальным
(16.4)
диаметры окружностей вершин
; (16.5)
диаметры окружностей впадин
; (16.6)
межосевое расстояние передачи
(16.7)
ширина зубчатого венца шестерни
(16.8)
1 Винтовые линии АС и ED проведены на делительном цилиндре.
Цилиндрическая передача, составленная из колес с косыми зубьями