Автоматизированный электропривод механизма поворота экскаватора ЭКГ-5
ЗАДАНИЕ
по дипломному проектированию студентке
Коцан Оксане Семеновне
1.Тема проекта: «Автоматизированный электропривод механизма
поворота экскаватора ЭКГ-5».
2. Утверждено приказом по университету №2049/с от 22.02.2013г.
3. Срок сдачи студентом законченного проекта 1 июня 2013 г.
4. Исходные данные к проекту:
КАЛЕНДАРНЫЙ ГРАФИК
выполнения ДП
|
Наименование и содержание этапа (раздела) |
Срок выполнения |
|
Ознакомление с заданием |
15.02-17.02.13 |
|
Подбор и изучение специальной литературы |
17.02-04.03.13 |
|
Изучение математического пакета Matlab 6.5 |
04.03-14.03.13 |
|
Расчет параметров экскаватора ЭКГ-5 |
14.03-01.04.13 |
|
Разработка принципов построения и методики синтеза САУ электроприводом |
01.04-20.04.13 |
|
Анализ качества процессов управления электроприводом |
20.04-01.05.13 |
|
Экономическая часть; проработка вопросов безопасности и экологичности проекта |
01.05-12.05.13 |
|
Оформление графической части |
12.05-19.05.13 |
|
Оформление пояснительной записки |
19.05-30.05.13 |
« ___ » __________ 2013 г.
Руководитель ДП Мурашкин С.И.
(подпись)
Задание принял к исполнению Коцан О.С.
(подпись, инициалы и фамилия студента)
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
На сегодняшний день более половины всего парка карьерных одноковшовых экскаваторов составляет машина ЭКГ-5А. Несмотря на свой солидный возраст, этот тип экскаватора остается основной экскавационной единицей при разработке карьеров нерудных материалов, в области добычи руды, угля и при строительстве крупных объектов.
Первые экскаваторы ЭКГ-5А появились еще в конце 1970-х годов. Они представляли собой модернизированные образцы ЭКГ-4,6Б. Экскаваторы ЭКГ-5А, с конструктивными минимальными изменениями, продолжают выпускать и сегодня.
Большой объём земляных работ на открытых горных работах угольной промышленности выполняется мощными одноковшовыми и роторными экскаваторами с электрическим приводом. Рост мощностей этих машин обусловливает увеличение мощностей приводов главных механизмов. Поэтому с точки зрения экономии как капитальных затрат на создание приводов, так и расхода электроэнергии во время эксплуатации машин, вопросу расчета привода и главным образом правильному определению мощности и выбору двигателей необходимо уделять большое внимание.
Режим работы электроприводов основных рабочих механизмов экскаватора характеризуется большим числом включений, резкими изменениями нагрузки, частыми изменениями направления вращения (реверсированием). Иными словами, электроприводы работают главным образом в неустановившихся режимах.
К основным переходным режимам электропривода экскаватора относятся пуск (разгон), остановка (торможение) и изменения направления вращения двигателей рабочих механизмов (реверсирование). Поэтому к электроприводу экскаватора предъявляются особые требования. Например, один из требований, предъявляемых к электроприводу механизма поворота, является обеспечение протекания переходных процессов в минимально возможное время с ограниченным ускорением или замедлением, в особенности при торможении. Такое требование вызвано тем, что механизм поворота работает исключительно в переходных процессах пуска, реверсирования и торможения, так как он обладает значительной массой, которая в несколько раз превышает маховую массу двигателя. Кроме того, вследствие большого передаточного отношения редуктора механизма поворота могут быть значительные люфты в передачах, что тоже требует плавного разгона во избежание резких ударов в передачах.
1 Общие сведения экскаватора ЭКГ-5А
- Электропривод экскаватора ЭКГ-5А
Карьерный, гусеничный, с ковшом вместимостью 5 м3 экскаватор ЭКГ-5А является электрической карьерной полноповоротной лопатой на гусеничном ходу, предназначенной для выемки и погрузки в транспортные средства полезных ископаемых и вскрышных пород, в том числе тяжелых скальных, предварительно разрыхленных взрывом. Разрабатываемые породы с объемной массой более 2 т/м3 должны быть предварительно разрыхлены. Экскаватор ЭКГ 5 предназначен для умеренного климата с интервалом температур от -40 до +40°С, а также для тропического климата на высоте не более 1000 м над уровнем моря.
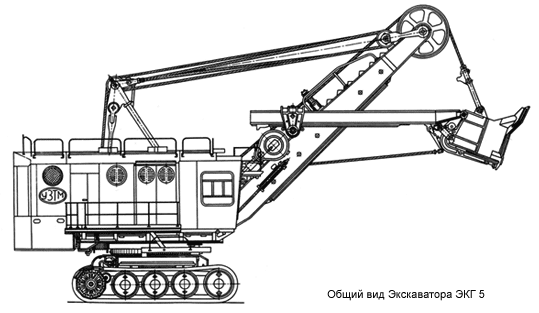
Рисунок 1.1 – Карьерный гусеничный экскаватор ЭКГ-5А
Экскаватор ЭКГ-5А состоит из следующих составных частей: поворотной части, включающей в себя поворотную платформу с расположенными на ней механизмами, и рабочее оборудование ходовой тележки, состоящей из нижней рамы, двух гусеничных рам с колесами и гусеничными цепями; ходового механизма, зубчатого венца, роликового круга.
Рабочее оборудование включает ковш, рукоять ковша, механизм открывания ковша, стрелу с напорным механизмом и двуногую стойку. Нижний конец стрелы опирается на подпятники поворотной платформы, а верхний — поддерживается на весу канатным полиспастом.
На поворотной платформе установлены подъемная лебедка, два поворотных механизма, электрооборудование, пневмосистема, двуногая стойка, стреловая лебедка и кузов. В передней правой части платформы расположена кабина машиниста. Поворотная платформа через роликовый круг опирается на ходовую тележку и соединена с ней центральной цапфой. Между поворотной и нижней рамами установлен высоковольтный токоприемник.
Поворотный механизм состоит из двух одинаковых агрегатов. Каждый из них имеет вертикальный электродвигатель с фланцем, опирающимся на корпус редуктора. Поворотный механизм экскаватора служит для вращения поворотной платформы с механизмами и рабочим оборудованием. Привод поворота осуществляется двумя одинаковыми механизмами, каждый из которых состоит из электродвигателя и редуктора. На верхнем коническом конце вала каждого электродвигателя установлен тормозной шкив для колодочного тормоза, предназначенного для затормаживания механизма поворота при передвижении экскаватора, на стоянке и при аварийном обесточивании, а на нижнем конце закреплена шестерня, являющаяся ведущей шестерней редуктора поворота. Консольный выходной вал редуктора заканчивается бегунковой шестерней, сцепленной с неподвижным зубчатым венцом, расположенным на нижней раме ходовой тележки экскаватора.
Все механизмы на платформе закрыты кузовом. Для удобства ремонта и монтажа механизмов на платформе кровля кузова имеет съемные панели. Расположение основных агрегатов и узлов экскаватора обеспечивает свободный доступ к ним для осуществления монтажных, демонтажных и ремонтных работ. Большинство механизмов и составных частей экскаватора ЭКГ-5А имеют блочную конструкцию и взаимозаменяемы, что позволяет применять при ремонтах агрегатно-узловой метод. Экскаватор ЭКГ-5А является модификацией ранее выпущенных Уралмашзаводом моделей ЭКГ-4.6Б, ЭКГ-4,6А, ЭКГ-4,6. Благодаря этому многие узлы и детали указанных экскаваторов могут быть использованы при ремонте экскаватора ЭКГ-5А.
Автоматизация производственных процессов на электротехнической основе требует электроприводов с регулированием скорости в широком диапазоне. Наиболее полно удовлетворяют требованиям различных механизмов в отношении регулирования скорости, являются электроприводы постоянного тока, особенно система ТП-Д.
Наряду с широким диапазоном регулирования скорости, достигающим в отдельных случаях значений 100 — 200 и более, система ТП-Д обеспечивает возможность получения специального вида механических характеристик электропривода и необходимый характер протекания переходных процессов — форсирование пуска, плавное и интенсивное торможение.
- Способы ограничения вращающегося момента электропривода
1.2.1 Механический способ
Это когда при возрастании нагрузки выше предельной, двигатель отключается от рабочего механизма в результате проскальзывания (расцепления муфты предельного момента в кинематической передаче). При этом рабочий орган и жестко связанные с ним передачи до ведомой части муфты резко останавливаются, а привод, у которого запасенная кинетическая энергия во вращающихся массах значительно больше кинетической энергии остановившейся части рабочего оборудования, продолжает работать и его кинетическая энергия не влияет на динамическую нагрузку рабочего оборудования. После устранения причины стопорения, нагрузка на валу механизма уменьшается. По достижении определенного значения нагрузки восстанавливается сцепление фрикциона или муфты с ведущим элементом передаточного механизма, и орган вновь приводится в движение. Механический способ ограничения момента используется на экскаваторах малой производительности (Э-1251,Э-2001).
1.2.2 Электрический способ
Это когда при возрастании нагрузки выше стопорного значения, производится автоматическое воздействие на систему управления электродвигателя. На современных экскаваторах в качестве основного средства ограничения момента электроприводов главных механизмов является использование привода с экскаваторной механической характеристикой.
Электродвигатели с такой характеристикой удовлетворяют всем требованиям. Они работают с номинальной частотой вращения до тех пор, пока нагрузка не возрастает до момента отсечки. Когда же момент нагрузки возрастает еще больше, двигатель резко снижает частоту вращения и останавливается при достижении стопорного момента.
1.3 Выбор способа соединения электродвигателей механизма поворота
Вращение поворотной платформы с расположенным на ней рабочим оборудованием у экскаватора ЭКГ-5А осуществляется двумя электродвигателями ДПВ-52. Электродвигатели поворота можно соединить последовательно, параллельно или питать от индивидуальных источников питания. Преимущества двухдвигательного привода поворота экскаватора очевидны: увеличение числа валопроводов механизма позволяет уменьшить нагрузку каждого валопровода; за счет этого облегчить передачи, что особенно важно для выходных ступеней, а так же достигается более благоприятное распределение усилий в опоро-поворотном устройстве.
Увеличение числа валопроводов механизма приводит к разветвлению электромеханических схем, за счет дополнительных упругих связей и дробления масс увеличивается число степеней свободы систем и динамика их существенно усложняется. Важной проблемой для подобной системы является обеспечение равномерного распределения нагрузок между валопроводами механизма как в установившихся, так и в переходных режимах работы электропривода. Известно, что наиболее простым и эффективным средством выравнивания нагрузок двигателей с жестко связанными валами в электроприводах постоянного тока является последовательное соединение якорных цепей двигателей. При одном и том же токе якорей различия в развиваемых двигателями моментах могут быть обусловлены лишь возможной неодинаковостью магнитных потоков машин. Поскольку различия в потоках одинаковых машин составляет 1-3%, развиваемые двигателем моменты при последовательном соединении можно считать практически равными. Это обстоятельство и определило последовательное соединение якорных цепей двигателей.
Между тем в переходных процессах распределение нагрузок между валопроводами может существенно ухудшаться по той причине, что связь между двигателями не является абсолютно жесткой. Увеличение числа упругосвязанных масс и вызываемое этим усложнение структуры электромеханической системы при двухдвигательном приводе создают благоприятные условия для развития механических колебаний. Колебания упругосвязанных масс всегда вызывают дополнительные динамические нагрузки передач, которые при неблагоприятных условиях могут достичь опасных значений. Последовательное соединение двигателей в принципе обеспечивает примерно одинаковую среднюю нагрузку каждого валопровода, а мгновенные значения могут различаться существенно.
Поэтому исследование системы электропривода поворота экскаватора ЭКГ-5А, характера и величин переменных, является важным этапом расчета электропривода в программе Matlab пакета Simulink. Питание эл.двигателей производится от тиристорного преобразователя, а система управления электроприводом построена по принципу подчиненного регулирования переменных.
2 Расчет параметров и выбор элементов силовой цепи ТП-Д
2.1 Выбор двигателя
При эксплуатации одноковшовых и роторных экскаваторов помимо полезной работы, связанной с разрушением и перемещением горной породы, постоянно совершается работа по преодолению силы тяжести и перемещению масс самого оборудования. Поэтому при расчете привода главных механизмов карьерных машин необходимо знать массы и веса, а так же линейные размеры как отдельных конструкций, так и всей машины.
Следовательно, чтобы определить мощности приводных двигателей главных механизмов карьерных машин, требуется выполнить отдельный проект отдельных конструкций и машины в целом, т.е. установить линейные размеры, массу и вес всей машины и ее отдельных узлов.
Однако, используя накопленный опыт в проектировании, создании и эксплуатации карьерных машин, можно выявить определенную взаимосвязь между вместимостью ковша у одноковшовых экскаваторов и их линейными размерами или между массой всего экскаватора и его отдельными узлами. С этой целью выведены эмпирические формулы для определения линейных размеров, масс и весов, как отдельных узлов, так и в целом всего экскаватора.
Электродвигатель постоянного тока ДПВ 52 предназначен для привода главных механизмов экскаваторов ЭКГ-5А (ЭКГ-4,6) в качестве двигателя поворота, а также может быть применен в других исполнительных механизмах.
Двигатель используется в районах умеренного и тропического климата (по требованию заказчика - в районах холодного климата), на высоте не более 1000 м над уровнем моря, с температурой окружающей среды от +40оС до 60оС, с относительной влажностью 80% при +20оС, окружающая среда взрывобезопасная, не содержащая агрессивных паров, газов и токопроводящей пыли.
Таблица 2.1 - Параметры электродвигателя ДПВ-52
|
Наименование |
Ед. измер. |
Обозначение |
Величина |
|
Двигатель ДПВ-52 |
|||
|
Номинальная мощность |
кВт |
60 |
|
|
Номинальная скорость |
об/мин |
1230 |
|
|
Номинальный ток |
А |
220 |
|
|
Номинальное напряжение |
В |
305 |
|
|
Сопротивление якоря двигателя |
Ом |
0,047 |
|
|
Сопротивление якорной цепи |
Ом |
0,16 |
|
|
Постоянная времени якорной цепи |
сек |
0,08 |
|
|
Конструктивный коэффициент двигателя |
4,67 |
||
|
Максимальная частота вращения |
об/мин |
2200 |
|
|
Момент инерции якоря |
кг/м2 |
1,88 |
|
|
Сопротивление обмотки якоря |
Ом |
0,0182 |
|
|
Номинальное напряжение возбуждения |
В |
95 |
|
|
Сопротивление дополнительных полюсов |
Ом |
0,019 |
|
|
Число пар полюсов |
2 |
||
|
Число электродвигателей в приводе |
2 |
В связи с успешными конструкторскими решениями, применением современных изоляционных материалов и электротехнических сталей, данные электродвигатели (табл. 2.1) имеют более высокие эксплуатационные характеристики. Высокая заводская готовность обеспечивает простой и быстрый монтаж.
2.2 Расчет параметров и выбор силового трансформатора
Силовой (преобразовательный) трансформатор необходим для изменения (обычно понижения) переменного напряжения с целью согласования напряжения сети и выходного напряжения преобразователя, а также гальванического разделения цепи нагрузки и сети. Кроме того, он служит для уменьшения скорости нарастания прямого тока тиристоров и ограничения тока короткого замыкания.
Исходными данными для расчета силового трансформатора являются номинальные средние значения выпрямленного напряжения и тока, определяемые по паспортным данным электродвигателя. Для вращения поворотной платформы экскаватора ЭКГ-5А используем два последовательно включенных двигателя ДПВ-52, технические данные которого приведены в таблице 2.1.
Расчет параметров и выбор силового трансформатора произведем по методике [7].
Максимальное значение ЭДС вентильного преобразователя при угле управления :
, (2.1)
,
где – среднее значение выпрямленного напряжения на якоре двигателя;
– падение напряжения на сглаживающем дросселе,
; (2.2)
– падение напряжения на активном сопротивлении силового трансформатора,
; (2.3)
– коммутационное падение напряжения для мостовых схем,
; (2.4)
– напряжение короткого замыкания силового трансформатора (5-7)%;
– среднее значение падения напряжения на тиристорах, пусть ;
– коэффициент запаса по напряжению, учитывающий снижение напряжения сети на 10%.
Действующее значение ЭДС фазы вторичной обмотки трансформатора, В:
, (2.5)
,
где – коэффициент схемы.
Действующее значение линейного тока вторичной обмотки трансформатора:
, (2.6)
,
где – коэффициент непрямоугольности тока в обмотках силового трансформатора;
– коэффициент тока вторичной обмотки.
Действующее значение линейного тока первичной обмотки силового трансформатора, А:
,
где – коэффициент тока первичной обмотки,
. (2.7)
При соединении обмоток 3х-фазного трансформатора по схеме «звезда», линейный ток равен фазному, т.е.
.
Расчетное значение мощности первичной и вторичной обмоток трансформатора, кВа, определим по формуле:
, (2.8)
где – число фаз трансформатора.
Расчетная (типовая) мощность силового трансформатора:
. (2.9)
По полученному значению расчетной мощности выбираем силовой трансформатор ТЭ250/6:
, , , потери ,
потери , , .
Активное сопротивление фазы вторичной обмотки трансформатора:
, (2.10)
где – потери короткого замыкания, Вт;
– фазный ток вторичной обмотки,
. (2.11)
Индуктивность фазы вторичной обмотки, Гн:
, (2.12)
где – индуктивное сопротивление фазы;
– полное сопротивление фазы трансформатора,
, (2.13)
где – напряжение короткого замыкания трансформатора;
.
Значения активного сопротивления и индуктивности трансформатора, приведенные к цепи выпрямленного тока:
(2.14)
где – число обмоток трансформатора, обтекаемых рабочим током.
2.3 Выбор тиристоров
Тиристоры выбирают по допустимым значениям тока и напряжения, учитывая способ и эффективность охлаждения.
Произведем выбор тиристоров с воздушным охлаждением и типовыми семиреберными охладителями.
Требуемая величина тока тиристора, А:
(2.15)
где – номинальный ток нагрузки, ;
– коэффициент запаса по току, учитывающий пусковой ток двигателя;
– число фаз;
– коэффициент, учитывающий условия охлаждения.
Номинальный ток тиристора .
Выбранный тиристор проверим на устойчивость при внешнем коротком замыкании:
(2.16)
,
где .
Выбираем тиристор Т500. Его параметры:
Таблица 2.2 – Технические данные тиристора Т500
|
Предельный ток тиристора , А |
Предельный ток тиристора, при скорости обдува 12м/с |
Ударный ток А, при |
Отпирающий ток управления, мА |
Отпирающее напряжение, , В |
|
50 |
490 |
7000 |
400 |
7 |
Максимальное значение напряжения на тиристоре:
, (2.17)
где – коэффициент прямого и обратного напряжения.
Расчетное напряжение тиристора, В:
(2.18)
,
где – коэффициент запаса по напряжению, учитывающий возможное перенапряжение.
Повторяющееся напряжение выбранного тиристора не меньше расчетного, как и должно быть. Для данного типа напряжение равно 150-1600 В.
2.4 Расчет индуктивности и выбор сглаживающего дросселя
Пульсации выпрямленного напряжения приводят к пульсации тока нагрузки, увеличивающем нагрев электродвигателя, и ухудшают его коммутацию. Величина пульсаций тока зависит от схемы выпрямления, угла управления и индуктивности контура нагрузки. С целью уменьшения пульсаций тока и расширения зоны темной коммутации двигателей в цепь нагрузки включают сглаживающие дроссели.
Требуемая индуктивность цепи выпрямленного тока, Гн:
, (2.19)
где – относительная величина действующего значения первой гармоники тока нагрузки;
– число пульсаций выпрямленного напряжения на периоде напряжения сети;
– относительная величина действующего значения первой гармоники выпрямленного напряжения при max угле управления.
, (2.20)
где .
Минимальная частота вращения двигателя при номинальном токе якоря, с-1:
, (2.21)
,
где – заданный диапазон регулирования частоты вращения.
Минимальное значение ЭДС преобразователя при номинальном токе двигателя, В:
;
; (2.22)
,
где – коэффициент двигателя.
(2.23)
где , – номинальное значение тока и напряжения якоря;
– сопротивление якорной цепи отдельного двигателя, приведенное к рабочей температуре.
,
(2.24)
где , , – справочные значения сопротивлений якоря, дополнительных полюсов и компенсационной обмотки;
– сопротивление щеточного контакта.
,
где – температура обмоток, при которой указано сопротивление в каталоге;
– рабочая температура обмоток.
Требуемая индуктивность сглаживающего дросселя:
, , (2.25)
где – индуктивность силового трансформатора;
– индуктивность якорной цепи отдельного двигателя.
, (2.26)
где – для компенсированных электродвигателей;
– число пар полюсов.
Выбираем дроссель типа ФРОС 400/0,5 с номинальной индуктивностью .
Минимальное значение угла управления:
, (2.27)
где – эквивалентное сопротивление преобразователя, Ом
, т.к. , (2.28)
где – сопротивление;
– коммутационное сопротивление;
– активное сопротивление сглаживающего дросселя.
2.5 Расчет параметров цепи якоря
Динамическое сопротивление тиристоров:
, (2.29)
где – падение напряжения открытого тиристора;
– номинальный ток тиристора, при котором в каталоге указывается классификационное падение напряжения .
, (2.30)
.
Расчетное сопротивление всей цепи якоря двигателя:
, (2.31)
.
Постоянная времени якорной цепи:
, (2.32)
,
где – индуктивность цепи выпрямленного тока, Гн.
Расчетное значение момента инерции привода:
, (2.33)
где – момент инерции якоря двигателя;
– момент инерции нагрузки, приведенной к валу двигателя.
Статический коэффициент усиления вентильного преобразователя:
, (2.34)
где – сигнал задания на входе.
Передаточный коэффициент по току якоря:
. (2.35)
Передаточный коэффициент по скорости двигателя :
. (2.36)
Передаточный коэффициент по упругому элементу:
. (2.37)
Электромеханическая постоянная времени двигателя:
. (2.38)
Электромеханическая постоянная времени механизма:
. (2.39)
]Электромеханическая постоянная времени электропривода:
. (2.40)
Постоянная времени нагрузки упругого элемента:
, (2.41)
где с.
Передаточный коэффициент обратной связи по скорости:
, (2.42)
где – сигнал задания.
Передаточный коэффициент цепи обратной связи по нагрузке упругого элемента:
, (2.43)
где – максимальный ток двигателя;
– сигнал задания.
Передаточный коэффициент цепи обратной связи по току:
, (2.44)
где – сигнал задания.
2.6 Статические характеристики и передаточные функции
элементов разомкнутой системы электропривода
2.6.1 Система импульсно-фазового управления
В современных управляемых вентильных преобразователях наибольшее распространение получили полупроводниковые системы импульсно-фазового управления (СИФУ) с вертикальным принципом управления.
Функциональная схема СИФУ с вертикальным принципом управления приведена на рисунке 2.1. Генератор опорного напряжения (ГОН), синхронизированный с напряжением сети, формирует опорное напряжение . Последнее сравнивается с управляющим напряжением на входе СИФУ. В момент их равенства генератор импульсов (ГИ) формирует управляющий импульс , подаваемый на управляющий электрод тиристора.
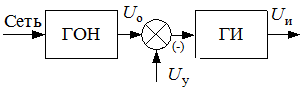
Рисунок 2.1 - Функциональная схема полупроводниковой СИФУ с вертикальным принципом управления.
Вид регулировочных характеристик СИФУ и управляемого преобразователя зависит от формы опорного напряжения.
Треугольное опорное напряжение (рисунок 2.2.):
, (2.45)
,
где – максимальное значение опорного напряжения (принимаем равным 10 В).
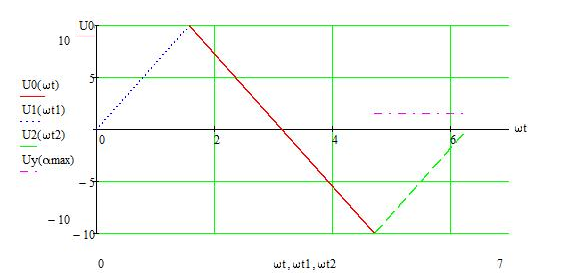
Рисунок 2.2 - Треугольное опорное напряжение
, (2.46)
где – угол управления, отсчитываемый от точки естественной коммутации вентилей.
.
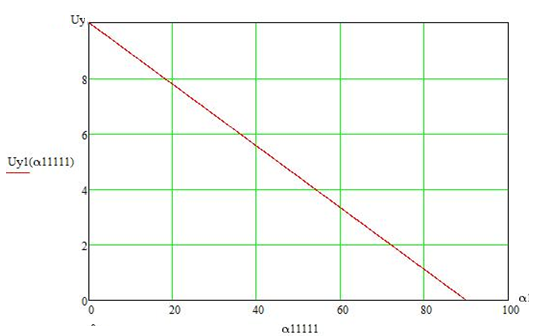
Рисунок 2.3 - Регулировочная характеристика СИФУ с треугольным опорным напряжением
Передаточный коэффициент системы импульсно-фазового управления:
, (2.47)
.
Регулировочные характеристики СИФУ с треугольной формой опорного напряжения приведена на рисунке 2.3.
2.6.2 Функциональная схема разомкнутой системы тиристорного электропривода
Для правильного выбора регулятора, обеспечивающего заданные свойства привода, необходимо знать характеристики и параметры объекта регулирования. Последний в системах электропривода состоит из управляемого вентильного преобразователя, двигателя и рабочего механизма.
Составными частями функциональной схемы разомкнутой системы «Управляемый вентильный преобразователь-двигатель» (УВП-Д, рис. 2.4) являются: СИФУ – система импульсно-фазового управления; СЧ – силовая часть преобразователя; Д – двигатель. Сигналы, обозначенные на рисунке: – управляющее напряжение на входе СИФУ; – угол управления тиристорами; – среднее значение выпрямленного напряжения; – выходная координата двигателя.
Рис. 2.4 - Функциональная схема разомкнутой системы УВП-Д
Выходной регулируемой координатой в автоматизированном электроприводе являются частота вращения, угол поворота вала, момент, мощность и др.
2.6.3 Регулировочные характеристики силовых схем
вентильных преобразователей
Характеристики управляемых вентильных преобразователей различны в зависимости от вида нагрузки, схем силовой части и СИФУ.
Регулировочные характеристики силовых схем УВП приведены на рис. Если принять, что индуктивное сопротивление в цепи переменного тока равно нулю, а ток нагрузки непрерывен (индуктивность цепи постоянного тока ), то уравнение регулировочной характеристики силовых схем имеет вид:
, (2.48)
.
В случае активной нагрузки () уравнение регулировочной характеристики для мостовой симметричной схемы в зоне прерывистого тока имеет вид:
,
(2.49)
.
Максимальное значение угла управления , при котором ток начнет прерываться (работа на активную нагрузку), можно определить следующим образом:
, (2.50)
.
При работе преобразователя на активную нагрузку в области углов управления регулировочная характеристика описывается уравнением (2.48), а в области - уравнением (2.49).
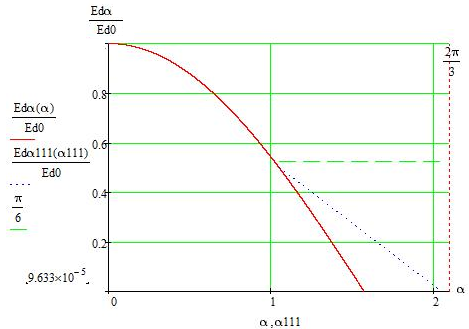
Рис. 2.5 - Регулировочные характеристики реверсивных силовых схем УВП с раздельным управлением.
Результирующая регулировочная характеристика преобразователя представляет собой зависимость ЭДС преобразователя от напряжения управления = f(Uу) и определяется регулировочными характеристиками силовой части и СИФУ преобразователя.
При наиболее широко используемом вертикальном принципе построения СИФУ вид регулировочной характеристики преобразователя зависит от формы опорного напряжения Uо генератора опорного напряжения (ГОН) СИФУ.
При данном опорном напряжении ГОН СИФУ описывается уравнением:
, (2.51)
где
.
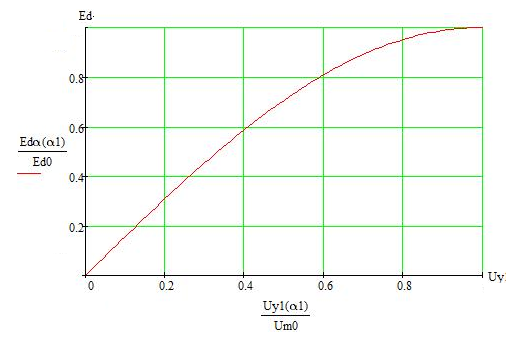
Рисунок 2.6 - Регулировочная характеристика УВП с СИФУ
и треугольным опорным напряжением
2.6.4 Передаточный коэффициент управляемых вентильных
преобразователей
Передаточный коэффициент УВП в соответствии с рис. 2.4 определяют по формуле:
, (2.52)
где – ЭДС на выходе преобразователя; – напряжение на входе СИФУ;
– передаточный коэффициент системы импульсно-фазового управления;
– передаточный коэффициент силовой части преобразователя.
Для наиболее часто встречающегося режима непрерывного тока регулировочная характеристика силовой части УВП описывается уравнением (2.48). На основании этого передаточный коэффициент силовой части равен:
, (2.53)
.
Передаточный коэффициент управляемых вентильных преобразователей зависит от формы опорного напряжения СИФУ, определяют его треугольное опорное напряжение треугольное опорное напряжение следующим образом: треугольное опорное напряжение:
. (2.54)
Передаточный коэффициент управляемых вентильных преобразователей при :
, (2.55)
.
Минимальный угол регулирования определим по формуле:
,
(2.56)
.
Передаточный коэффициент управляемых вентильных преобразователей при :
, (2.57)
Нетрудно видеть, что передаточный коэффициент УВП зависит от угла , т. е. . Поэтому для дальнейших расчетов следует определить среднее значение передаточного коэффициента на всем диапазоне регулирования:
(2.58)
,
2.6.5 Внешние характеристики управляемых вентильных
преобразователей
Внешние характеристики УВП зависят от схемы силовой части преобразователей и вида нагрузки.
В общем случае уравнение внешних характеристик, представленных на рисунке 2.7, имеет вид:
(2.59)
где и – напряжение и ток на выходе преобразователя соответственно (А);
– эквивалентное сопротивление тиристорного преобразователя.
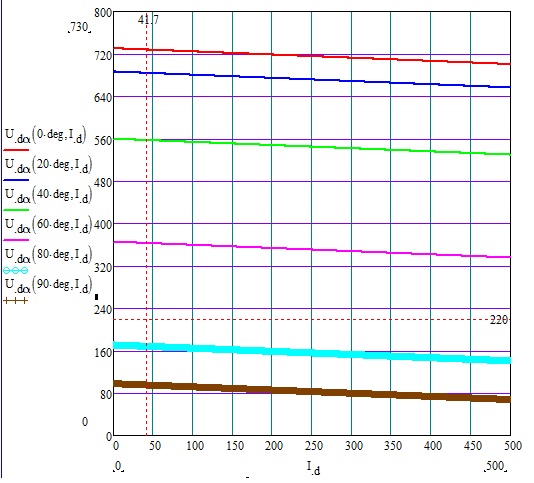
Рисунок 2.7 - Внешние характеристики УВП для режима непрерывного тока
2.6.6 Электромеханические характеристики двигателя
в разомкнутой системе
Уравнение электромеханических характеристик двигателя в режиме непрерывного тока имеет вид:
, (2.60)
, (2.61)
.
Здесь – частота вращения идеального холостого хода двигателя, с-1; (А).
, (2.62)
,
где C – конструктивный коэффициент электродвигателя;
– расчетное значение сопротивления якорной цепи в системе «преобразователь-двигатель», Ом:
, (2.31)
.
,
где , и – эквивалентное сопротивление тиристорного преобразователя, сопротивление шунта и приведенное к рабочей температуре сопротивление якорной цепи отдельного двигателя.
Расчетная индуктивность якорной цепи, Гн:
, (2.64)
где – индуктивность трансформатора (токоограничивающего реактора в безтрансформаторных схемах), приведенная к цепи выпрямленного тока;
– индуктивность выбранного сглаживающего реактора;
– индуктивность якорной цепи отдельного двигателя.
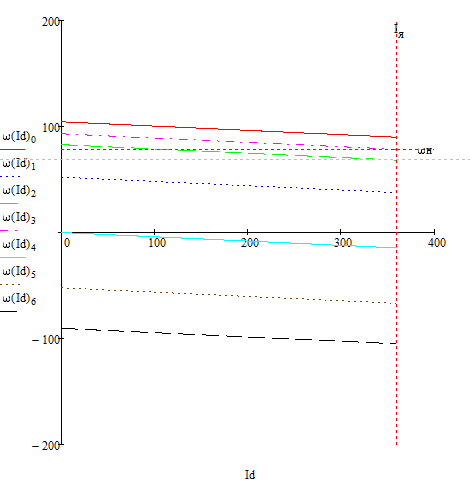
Рисунок 2.8 - Электромеханические характеристики двигателя
в разомкнутой системе