Исследование синхронной машины в генераторном и двигательном режимах
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
"ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ"
Кафедра электрооборудования
А.Н. Шпиганович, К.Д. Захаров
Исследование синхронной машины
в генераторном и двигательном режимах
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторной работе № 5 по дисциплине
"Электрические машины"
Для студентов специальности 140610
"Электрооборудование и электрохозяйство предприятий,
организаций и учреждений"
Липецк 2007
УДК 621.31 (07)
Ш 835
Шпиганович А.Н. Исследование синхронной машины в генераторном и двигательном режимах [Текст]: методические указания к лабораторной работе №5 по дисциплине "Электрические машины"/А.Н. Шпиганович, К.Д. Захаров. – Липецк: ЛГТУ, 2007. – 46 с.
Методические указания предназначены для студентов 2 и 3 курса очной и 4 курса очно–заочной и заочной форм обучения специальности 140610 "Электрооборудование и электрохозяйство предприятий, организаций и учреждений"
Табл. 3. Ил. 30. Библиогр.: 6 назв.
Рецензент Зацепин Е.П. канд. техн. наук, доцент
© А.Н. Шпиганович, К.Д. Захаров, 2007
© ГОУ ВПО "Липецкий государственный
технический университет, 2007
Исследование синхронной машины в генераторном
и двигательном режимах
Цель работы – ознакомиться со свойствами синхронной машины, способами регулирования активной и реактивной мощностей.
1. Оборудование и приборы
Синхронная машина (СМ) и двигатель постоянного тока составляют агрегат №2. Валы этих машин соединены через нагрузочное устройство, которое служит для создания момента нагрузки при работе СМ в режиме двигателя.
Двигатель постоянного тока является приводным при работе синхронной машины в режиме генератора.
По указанию преподавателя эта лабораторная работа может выполняться в нескольких вариантах: в полном объеме - разделы А, Б, В; в сокращенном объеме- отдельные разделы или любая их комбинация.
2. Порядок выполнения работы
Работа синхронного генератора на автономную нагрузку. Автономной нагрузкой в этом режиме является асинхронный электродвигатель. Перед сборкой цепей все соединения на панелях должны быть разобраны.
2.1. С помощью вилок собрать цепи на панели «Синхронная машина» в соответствии с мнемонической схемой, приведенной на панели и показанной на рис.1.1.
К выходным зажимам синхронного генератора (СГ) подключить асинхронный электродвигатель (АД). Амперметр А1 включить на 7,5 А.
2.2. Идентифицировать приборы, указанные на мнемосхеме с приборами на щите стенда.
2.3. Поставить переключатель «Пуск двигателя» на панели «Машины постоянного тока» в начальное положение 1, а ручку «Регулировка возбуждения» на этой панели в крайнее правое положение, что соответствует максимальному току возбуждения приводного двигателя.
2.4. Поставить регулятор возбуждения синхронной машины на щите в нулевое положение (минимальный ток возбуждения).
2.5. После проверки схемы лаборантом включить напряжение питания установки кнопкой «Сеть» на крайней левой панели.
2.6. Кнопкой на панели «Машины постоянного тока» включить постоянное напряжение. Кнопками «Установка напряжения питания электрических машин» на крайней левой панели установить напряжение на якоре двигателя Uя = 190 В.
2.7. Переключателем «Пуск двигателя» запустить приводной двигатель, последовательно переводя рукоятку переключателя в крайнее правое положение.
2.8. Спустя 1-2 минуты, необходимые для стабилизации скорости, кнопками «Установка напряжения питания» довести частоту вращения агрегата №2 до значения n = 3000 об/мин.
2.9. Кнопкой на панели «Синхронная машина» включить цепь возбуждения синхронного генератора (СГ) и регулятором установить ток возбуждения I2 =3 А. Следует учесть, что амперметр А2 показывает реальный ток возбуждения. Поэтому А2 не нужно пересчитывать.
2.10. Кнопкой на панели «Синхронная машина» включить статор СГ. После разгона асинхронного двигателя регулятором возбуждения СГ установить напряжение статора U = 230 В, записать ток возбуждения I2 и поддерживать его постоянным.
2.11. Установить рукоятку «Регулировка нагрузки» в крайнее левое положение, что соответствует отсутствию механической нагрузки АД. Записать в табл.1 напряжение U и ток I1 статора СГ, реактивную мощность Q, которая измеряется прибором kW.
2.12. Включить нагрузку агрегата №1 и, увеличивая момент нагрузки АД от 0до 1,7 Н м, измерить и записать в табл.2.1 необходимые величины. При этом частоту вращения агрегата №2 нужно поддерживать постоянной n = 3000 об/мин кнопками «Установка напряжения питания». Измерения провести при 4-5 значениях момента.
2.13. Кнопкой «Сеть» отключить напряжение на стенде.
Таблица 2.1
|
M, Н м
|
|
|
|
|
|
|
U, В
|
|
|
|
|
|
|
I1, А
|
|
|
|
|
|
|
Q, кВАр
|
|
|
|
|
|
|
, град
|
|
|
|
|
|
Работа синхронного генератора (СГ) параллельно с энергосистемой.
2.14. Посредством трех вилок соединить три фазы статора с сетью в соответствии с мнемосхемой на панели «Синхронная машина» (рис.1.1).
Амперметр А1 нужно включить предел 3 А. Если раздел А не выполняется, тог следует соединить и все другие цепи на мнемосхеме.
2.15. Проделать все, что указано в пунктах 2-8 раздела А, в той же последовательности.
ВНИМАНИЕ: Выполнение п.16-18 требует особой тщательности и проводится под наблюдением лаборанта, так как произвольное подключение статора к сети ведет к аварии.
2.16. Кнопками на панели «Синхронная машина» включить цепи возбуждения и статора СГ. Регулятором возбуждения установить напряжение статора равным напряжению сети (1 условие включения СГ к сети).
2.17. Наблюдая за прибором «Синхронизация» и ламповым синхроноскопом из 3-х ламп и изменяя скорость ротора СГ (кнопками «Установка напряжения», которыми регулируют напряжение приводного двигателя), добиться неподвижного положения стрелки прибора, лампы при этом не должны мигать. Это соответствует 2-му условию включения СГ к энергосистеме - равенству частот эдс статора и напряжения сети.
2.18. Для выполнения третьего условия – совпадения фаз эдс и напряжения - нужно немного изменит скорость ротора СГ и в середине паузы, соответствующий гашению ламп, нажать кнопку «Включение к сети синхронной и асинхронной машин». Ротор СГ входит в синхронизм, чем обеспечивается его устойчивая работа. После этого отключить ламповый синхроноскоп.
2.19. Снять U – образную характеристику СГ. Для этого следует установить ток возбуждения I2 =3,7 А, записать показания приборов в табл.2.2. Затем, уменьшая I2 до 3 А, провести 4-5 измерений.
ВНИМАНИЕ: При токе I2 =1,3-1,9 А показания приборов kW могут быть меньше нуля. В этой части шкалы следует действовать осторожно, не доводя стрелку прибора до упора, и провести 2 измерения, оценивая показания kW приблизительно. Измерения при Q=0 обязательны.
Таблица 2.2
|
I2 , А
|
|
|
|
|
|
|
|
|
I1 , А
|
|
|
|
|
|
|
|
|
Q, кВАр
|
|
|
|
|
|
|
|
|
, град
|
|
|
|
|
|
|
|
Записать величину напряжение сети U.
Работа синхронной машины в режиме двигателя.
2.20. Если раздел А и Б не выполняется, то для пуска синхронного двигателя сначала нужно выполнить указанное в пунктах 14-18.
2.21. Регулируя ток возбуждения I2, довести показания kW до нуля, кнопкой на панели «Машина постоянного тока» отключить приводной двигатель постоянного тока и поставить переключатель «Пуск двигателя» в начальное положение 1. Синхронный генератор переходит в двигательный режим и работает на холостом ходу с моментом нагрузки M0.
2.22. Снять U - образную характеристику синхронного двигателя на холостом ходу, действуя в соответствии с п.2.19, показания приборов занести в табл.3, причем показания приборов kW нужно записать с противоположным знаком, например, при Q=100 в табл.2.3 должно быть (-100).
Таблица 2.3
|
|
Холостой ход M=0
|
Нагрузка M=0,6-1,1
|
|
I2, А
|
|
|
|
|
|
|
|
|
|
I1 , А
|
|
|
|
|
|
|
|
|
|
Q, кВАр
|
|
|
|
|
|
|
|
|
|
, град
|
|
|
|
|
|
|
|
|
2.23. Снять U - образную характеристику двигателя при нагрузке. Для этого рукоятку «Регулировка нагрузки» поставить в крайнее левое положение. Кнопками включить нагрузку агрегата №2 и очень медленным поворотом рукоятки установить момент нагрузки двигателя в пределах 0,6-1,1 Н м. величину момента записать в табл.2.3. При этом моменте провести измерения аналогично п.2.22, записывая результаты в табл.2.3.
2.24. Отключить напряжение на стенде кнопкой «Сеть», поставить все рукоятки регуляторов в исходное положение.
3. Обработка результатов измерений и их анализ
3.1. Угол сдвига фаз между напряжением и током статора при работе СГ в автономном режиме можно определить из формулы для реактивной мощности:
= arcsin Q/ UI1. (3.1)
3.2. Используя табл.2.1, следует построить:
- внешнюю характеристику СГ U = f(I1) и зависимость =f(I1) на одном графике.
- векторную диаграмму при максимальном токе статора I1. Векторная диаграмма строится в соответствии с уравнением:
0 = +=+jx1.
Вектор напряженияследует отложить вертикально и к нему добавить падение напряжения на синхронном индуктивном сопротивлении x1 =10 Ом. должно быть перпендикулярно линии вектора тока, который отстает от напряжения по фазе на угол. Результирующий вектор соответствует эдс статора 0, создаваемый полем ротора.
3.3. По результатам измерений п.2.19 следует:
- определить угол по уравнению (1).
- построить U - образную характеристику СГ. I1 = f (I2).
- совмещенную вертикальную диаграмму для 3-х режимов - при максимальном токе возбуждения I2 ,
- при токе возбуждения I2, соответствующем Q=0
- при минимальном токе возбуждения.
3.4. По результатам измерений п.2.22, 2.23 следует рассчитать угол по сравнению (1); построить 2 U - образные характеристики (для M=0 и M0); построить совмещенную векторную диаграмму для 3-х режимов:
- при максимальном токе возбуждения I2 (перевозбуждение) при этом ток I1 опережает U;
- при токе возбуждения I2, соответствующем Q = 0;
- при минимальном токе возбуждения I2 (недовозбуждение) ток I1 отстает от напряжения.
3.5. Построить угловую характеристику синхронного двигателя
Mэм =f (Q) = (3E0 U / x1) sin при максимальном токе возбуждения =2n /60.
4. Материал для самоподготовки
4.1. Общие сведения о синхронных машинах
Бесколлекторные машины переменного тока, у которых преобразование энергии происходит вследствие механического перемещения постоянного магнитного потока полюсов относительно обмотки якоря, называются синхронными. Синхронные машины отличаются от машин постоянного тока тем, что у них отсутствует коллектор, а обмотка якоря имеет выводные концы, которые присоединяются к сети переменного тока. От асинхронной тем, что ток в обмотке ротора появляется не при вращении ее в магнитном поле статора, а подводится к ней от постороннего источника постоянного тока. Статор синхронной машины выполнен так же, как и асинхронной, и на нем обычно расположена трехфазная обмотка. Обмотка ротора образует магнитную систему с тем же числом полюсов 2р, что и у статора. Она создает магнитный поток возбуждения и называется обмоткой возбуждения. Вращающаяся обмотка ротора соединяется с внешней цепью источника постоянного тока с помощью контактных колец и щеток. Обмотка якоря (в большинстве случаев трех- или двухфазная) создает вращающееся поле, которое взаимодействует с полем полюсов, в результате чего возникает электромагнитная; сила, которая стремится ориентировать ротор таким образом, чтобы поля полюсов ротора и якоря были направлены согласно. Вследствие этого независимо от величины нагрузки поля, создаваемого якорной обмоткой неподвижного статора, и полюса ротора вращаются с одинаковой скоростью в одном направлении, т. в. синхронно. Отсюда и название машин - синхронные. Скорость вращения n ротора строго соответствует частоте сети f1.
. (4.1)
Схема синхронной машины показана на рис. 4.1. Относительное перемещение потока полюсов может осуществляться при неподвижном якоре и вращающихся полюсах или при вращающемся якоре и неподвижных полюсах. В большинстве случаев применяется первый способ. Синхронные машины, у которых перемещение потока полюсов относительно якоря осуществляется по второму способу, называются обращенными. Если в машине постоянного тока точки обмотки якоря соединить не с коллектором, а с контактными кольцами, получится обращенная синхронная машина переменного тока. В машине обычного исполнения обмотку якоря располагают на статоре, а полюсы помещают на вращающемся роторе. Обмотку возбуждения питают постоянным током через щетки и контактные кольца. На рис. 4.2, а показан двигатель с возбуждением от постоянного тока: 1 - обмотка якоря; 2 - статор; 3 - полюсы; 4 - обмотка возбуждения; 5 - щетки; 6 - контактные кольца.
Число пар полюсов ротора p определяется скоростью вращения машины по известному выражению для скорости вращения магнитного поля. У тихоходных машин, например генераторов гидроэлектростанций, число пар полюсов может быть несколько десятков. У быстроходных, например, у генераторов тепловых электростанций, число пар полюсов обычно равно 1. Полюсы ротора могут конструктивно выполняться отдельно или формироваться обмоткой распределенной в пазах цилиндрического ротора. В первом случае ротор называется явнополюсным, во втором - неявнополюсным. Неявнополюсные роторы используются в быстроходных машинах потому, что их конструкция обладает большей прочностью и может противостоять значительным центробежным силам.
Полюсы ротора обычно представляют собой пакет, набранный из штампованных листов электротехнической стали; на полюсах помещается обмотка возбуждения. Генераторы, приводимые во вращение тихоходными гидравлическими турбинами, всегда имеют явнополюсный ротор; они называются гидрогенераторами. Синхронные двигатели и компенсаторы, скорость вращения которых не превышает 1500 об/мин, также выполняются явнополюсными. Ротор двигателей с постоянными магнитами и некоторых других типов двигателей не имеет обмотки возбуждения (рис. 4.2, а). Ротор быстроходных мощных синхронных машин на 3000 об/мин выполняется неявнополюсным (рис. 4.2, в). Он вытачивается из массивной стальной поковки и имеет вид цилиндра, в котором выфрезерованы пазы для размещения в них обмотки возбуждения. Синхронные генераторы, приводимые во вращение быстроходными паровыми турбинами, называются турбогенераторами. Конструктивное устройство синхронных микродвигателей такое же, как и асинхронных, за исключением ротора, который имеет свои особенности. Иногда генераторы с постоянными магнитами имеют ротор с когтеобразными полюсами показанный на рис. 4.3: 1 - вал; 2 - немагнитная втулка; 3 - полюс; 4 - цилиндрический постоянный магнит. Генераторы с постоянными магнитами изготовляются мощностью от десятков до нескольких сотен ватт.
Все промышленные генераторы переменного тока являются синхронными. В звукозаписи и во многих других областях техники к электродвигателям малой мощности предъявляются требования постоянства скорости вращения. В этих случаях удобно применять синхронные микродвигатели, которые обеспечивают постоянную скорость вращения при колебаниях напряжения сети и нагрузки на валу. В системах автоматики и в ракетной технике нашли широкое применение шаговые микродвигатели с дискретным вращением вала.
Важным преимуществом синхронных двигателей по сравнению с асинхронными является способность поддерживать напряжение сети при его колебаниях. Синхронные двигатели, имеющие возбуждение, не потребляют из сети реактивной мощности, а могут отдавать ее в сеть, т. е. работать при опережающем токе. Некоторые типы синхронных двигателей выполняются с самовозбуждением через селеновые выпрямители. Коэффициент полезного действия синхронных двигателей на 1-2% выше, чем асинхронных. Синхронные машины используются также в качестве компенсаторов реактивной мощности, которые работают вхолостую при опережающем токе.
4.2. Принцип действия синхронной машины
Статор синхронной машины имеет такое же устройство, как и статор асинхронной машины. Трехфазная или в общем случае m-фазная обмотка статора синхронной машины выполняется с таким же числом полюсов, как и ротор, и называется также обмоткой якоря. Сердечник статора вместе с обмоткой называется также якорем.
Ротор синхронной машины имеет обмотку» возбуждения, питаемую через два контактных кольца и щетки постоянным током от постороннего источника (рис. 4.4.).
В качестве источника чаще всего служит генератор постоянного тока относительно небольшой мощности (0,3-3,0% от мощности синхронной машины), который называется возбудителем и устанавливается обычно на одном валу с синхронной машиной.
Принцип действия синхронных машин основан на взаимодействии магнитных полей статора и ротора. Схематически вращающееся магнитное поле статора можно изобразить полюсами магнитов вращающихся в пространстве со скоростью вращения магнитного поля статора . Поле ротора также можно изобразить в виде постоянного магнита, вращающегося синхронно с полем статора.
При отсутствии внешнего вращающего момента, приложенного к валу машины, оси полей статора и ротора совпадают (рис. 4.5, а). Силы притяжения F действуют на ротор вдоль оси полюсов и взаимно компенсируют друг друга. Угол между осями полей статора и ротора равен нулю.
Если на вал машины действует тормозной момент, то ротор смещается в сторону запаздывания на угол (рис. 4.5, б). В результате силы притяжения F раскладываются на составляющие, направленные вдоль оси полюсов ротора (осевая составляющая) и перпендикулярно оси полюсов (тангенциальная составляющая). Осевые составляющие взаимно компенсируются, а тангенциальные создают вращающий момент , компенсирующий внешний момент, приложенный к валу (D - диаметр точек приложения тангенциальных сил). Машина при этом работает в режиме двигателя, компенсируя расходуемую на валу механическую мощность потреблением активной мощности из сети питающей статор.
В случае если к ротору прикладывается внешний момент, создающий ускорение, т.е. действующий в направлении вращения вала, картина взаимодействия полей меняется на обратную (рис. 4.5, в). Направление углового смещения изменяется на противоположное, соответственно изменяется направление тангенциальных сил и направление действия электромагнитного момента. В этом случае он становится тормозным, а машина работает генератором, преобразующим подводимую в валу машины механическую энергию, в электрическую энергию, отдаваемую в сеть, питающую статор.
Вращающий момент в синхронной машине может возникать и при отсутствии собственного магнитного поля у ротора. Пусть, например, обмотка возбуждения явнополюсного ротора отключена от питания (рис. 4.6.). Здесь явнополюсный ротор связан с системой координат d-q таким образом, что ось d-d совмещена с осью симметрии в направлении максимальной магнитной проводимости, а ось q-q с направлением минимальной магнитной проводимости. Ось d-d совпадает также с осью магнитного поля возбужденного ротора и называется продольной осью, а ось q-q соответственно – поперечной.
При отсутствии внешнего момента явнополюсный ротор займет положение, при котором продольная ось будет совпадать с осью полюсов магнитного поля статора. Это положение соответствует минимальному магнитному сопротивлению для магнитного потока статора.
Если на вал машины будет действовать тормозной момент, то ротор отклонится на угол . При этом магнитное поле статора деформируется, т.к. магнитный поток будет стремиться замкнуться по пути наименьшего сопротивления. Магнитный поток определяется через магнитные силовые линии, т.е. линии, направление которых в каждой точке соответствует направлению действия силы, поэтому деформация поля приведет, также как и в случае возбужденного ротора, к появлению результирующей тангенциальной силы Fpt. Отличие от возбужденного ротора будет состоять в том, что тангенциальная сила будет функцией двойного угла . Это отличие возникает вследствие того, что у возбужденного ротора возможно только одно положение устойчивого равновесия при , а невозбужденный ротор может находиться в равновесии при .
Вращающий момент, возникающий в машине с невозбужденным ротором за счет тангенциальных сил называется реактивным моментом и его зависимость от выражается функцией .
Очевидно, что необходимым условием возникновения реактивного момента является магнитная асимметрия ротора.
Рассмотренные выше процессы в синхронной машине наглядно демонстрируют принцип обратимости электрических машин, т.е. способность любой электрической машины изменять направление преобразования энергии на противоположное. В синхронных машинах для перехода от режима работы двигателем в режим генератора достаточно изменить направление (знак) момента нагрузки на валу.
4.3. Явнополюсные синхронные машины
Явнополюсные синхронные машины имеют выступающие полюсы и изготовляются с числом полюсов 2р4. Сердечники полюсов явнополюсных машин набираются из листов стали толщиной 1-2 мм и стягиваются с помощью шпилек. В средних и крупных машинах полюсы крепятся к выступам вала, к втулке вала или к ободу крестовины с помощью Т-образных хвостов. В малых машинах полюсы крепятся также с помощью болтов. Обмотка возбуждения крупных машин наматывается из голой полосовой меди на ребро, и проводники обмотки изолируются друг от друга изоляционными прокладками. На рис. 4.7. показаны полюсы явнополюсной синхронной машины: 1 - обмотка возбуждения; 2 - сердечник полюса с полюсным наконечником и Т-образным хвостом; 3 - междукатушечные соединения, 4 - шпилька для крепления междукатушечного соединения, 5 - пружина для сжатия обмотки, 6 – клинья.
В полюсных наконечниках синхронных двигателей в соответствующих пазах, помещаются стержни. Пусковой обмотки из материала с повышенным удельным сопротивлением (латунь и др.), которые привариваются по торцам к короткозамыкающим сегментам, а последние соединяются в общие короткозамыкающие кольца. Такая обмотка напоминает беличью клетку короткозамкнутого асинхронного двигателя и служит для асинхронного пуска синхронного двигателя. Такие же по конструкции обмотки, но из медных стержней изготовляются нередко в синхронных генераторах и называются в этом случае успокоительными или демпферными обмотками. В последнее время полюсы синхронных двигателей часто делают также массивными из стальных поковок, и в этом случае роль пусковой обмотки выполняют сами массивные полюсы. Торцы наконечников соседних полюсов при этом соединяются проводниками в виде планок. На рис. 4.8. приведен принцип устройства явнополюсной синхронной машины: 1 - статор (якорь), 2 - ротор (индуктор), 3 - обмотка возбуждения.
Явнополюсные синхронные машины с горизонтальным валом обычно имеют аксиально-радиальную вентиляцию. Воздух засасывается по обоим торцам машины с помощью вентиляционных лопаток на ободе ротора, затем проходит между полюсами и по воздушному зазору, далее через радиальные каналы в сердечнике статора и выпускается наружу через окна на боковых поверхностях корпуса статора.
Явнополюсные синхронные машины мощностью до 10-12 кВт имеют иногда также так называемую обращенную конструкцию, когда индуктор (полюсы) является неподвижным, а якорь вращается. Такие машины напоминают по устройству машины постоянного тока, у которых коллектор заменен тремя контактными кольцами для отвода тока из обмотки якоря. Для крупных машин обращенная конструкция невыгодна, так как отвод из обмотки якоря больших токов при высоком напряжении с помощью колец и щеток чрезвычайно затруднителен и сложно осуществить надежную изоляцию вращающейся якорной обмотки высокого напряжения.
Явнополюсные синхронные машины с горизонтальным валом широко используются в качестве двигателей и генераторов, в частности в качестве так называемых дизель-генераторов, соединяемых с дизельными двигателями внутреннего сгорания. Дизель-генераторы обычно имеют один подшипник, вал генератора жестко соединяется с валом дизеля, и в качестве второй опоры ротора генератора используется подшипник самого дизеля. Во избежание затруднений, которые могут возникнуть при работе дизель-генератора вследствие неравномерности вращающего момента дизеля как поршневой машины, дизель-генератор снабжается маховиком или его ротор выполняется с повышенным маховым моментом (моментом инерции). Аналогичную конструкцию имеют также синхронные двигатели, предназначенные для привода поршневых компрессоров.
Синхронные генераторы, сочленяемые с гидравлическими турбинами, работающими на гидроэлектростанциях, называются гидрогенераторами. Они имеют явнополюсную конструкцию и при мощностях до нескольких тысяч киловатт чаще всего также выполняются с горизонтальным валом. В последние годы все большее применение начинают находить так называемые капсульные гидрогенераторы, также имеющие горизонтальный вал. Такие генераторы заключаются в водонепроницаемую оболочку, или капсулу, которая с внешней стороны обтекается потоком воды, проходящим через турбину. Такая конструкция применяется для низконапорных гидростанций и позволяет отказаться от машинного зала и достичь большей компактности станции, что приводит к ее удешевлению. Капсульные гидрогенераторы изготовляются на мощности до нескольких десятков тысяч киловатт.
4.4. Неявнополюсные синхронные машины
Неявнополюсные синхронные машины имеют цилиндрический ротор, выполняемый обычно из массивной стальной поковки. В роторе фрезеруются пазы для укладки обмотки возбуждения. Эти машины выпускаются с числом полюсов 2р = 2 и 2р = 4 и имеют поэтому большие скорости вращения. Изготовление крупных машин с такими скоростями вращения при явнополюсной конструкции по условиям механической прочности ротора и крепления его полюсов и обмотки возбуждения невозможно. На рис. 4.9. приведен принцип устройства неявнополюсной синхронной машины: 1 - статор (якорь), 2 - ротор (индуктор), 3 - обмотка возбуждения
Основными представителями неявнополюсных машин являются турбогенераторы, т. е. синхронные генераторы, предназначенные для непосредственного соединения с работающими на тепловых электростанциях паровыми турбинами. В настоящее время большинство турбогенераторов выполняется двухполюсными, так как паровые турбины являются в принципе быстроходными машинами и при больших скоростях вращения их технико-экономические показатели выше. Однако для атомных электростанций с водо-водяными реакторами выпускаются также четырехполюсные турбогенераторы. На рис. 4.10. показана схема поперечного разреза турбогенератора: 1 - ротор; 2 - витки возбуждения; 3 - пазы, в которых размещается обмотка возбуждения; 4 - большой зуб ротора; 5 - зубцы ротора; 6 - статор; 7 - пазы статора; 8 - обмотка статора
Роторы турбогенераторов большой мощности изготовляются из цельных поковок высококачественной хромоникелевой или хромоникельмолибденовой стали. Однако и при этом предельный диаметр активной части ротора при nн = 3000 об/мин по условиям механической прочности из-за больших центробежных сил не может превышать 1,20-1,30 м. В связи с этим роторы мощных машин приходится делать длинными. В то же время увеличение длины ротора ограничено пределом увеличения гибкости и прогиба ротора и пределом связанного с этим увеличения его вибрации. Наибольшая возможная активная длина ротора составляет l = 7,5-8,5 м.
Таким образом, предельные размеры турбогенераторов ограничены возможностями современной металлургии. Поэтому увеличение предельных мощностей турбогенераторов связано с увеличением электромагнитных нагрузок (линейные нагрузки и плотности тока обмоток) и интенсификацией способов охлаждения.
Обмотка ротора турбогенератора выполняется в виде концентрических катушек и закрепляется в пазах немагнитными металлическими клиньями (дюралюминий и т. д.), которые обладают требуемой механической прочностью и воспринимают весьма большие центробежные силы обмотки возбуждения. Немагнитные клинья предотвращают возникновение больших магнитных потоков рассеяния, замыкающихся вокруг лазов через клинья и вызывающих излишнее насыщение зубцов и уменьшение полезного потока, проходящего через воздушный зазор в статор. Примерно одна треть каждого полюсного деления ротора свободна от пазов и составляет так называемый большой зуб. Обмотки ротора имеют миканитовую или другую изоляцию класса В или F. Лобовые части обмотки ротора закрываются прочным кольцеобразным стальным бандажом, рассчитанным на действие центробежных сил лобовых частей обмотки и самого бандажа. Весьма серьезной является проблема охлаждения тур6oгенератора.
Турбогенераторы мощностью до 30 тыс. кВт выполняются с замкнутой системой воздушного охлаждения, а при Рв 5= 30 тыс. кВт воздушная охлаждающая среда заменяется водородом с избыточным давлением около 0,05 атм. во избежание засасывания воздуха через уплотнения и образования гремучей смеси. Применение водорода позволяет усилить съем тепла, повысить мощность при заданных размерах машины и уменьшить вентиляционные потери.
В обоих случаях схема вентиляции одинакова. Воздух (или водород) при этом. Засасывается двумя вентиляторами, установленными по обоим концам вала внутри машины, распределяется по отдельным струям и омывает лобовые части обмоток статора и ротора, стенки радиальных каналов сердечника статора, внешнюю поверхность ротора и внутреннюю поверхность сердечника статора.
В центральной части машины холодный воздух по одним группам радиальных каналов сердечника статора проходит от его внешней поверхности к воздушному зазору между Статором и ротором и по другим группам радиальных каналов возвращается к внешней поверхности статора. Пространство между внешней поверхностью сердечника статора и корпусом (кожухом) статора разделено в осевом направлении стенками, перпендикулярными линии вала, на ряд камер холодного и горячего воздуха. В камеры холодный воздух поступает от вентиляторов, а нагретый воздух из нижней части машины отводится к водяным охладителям, которые при воздушном охлаждении устанавливаются в фундаменте турбогенератора, а при водородном охлаждении - внутри корпуса машины. Подобная система вентиляции называется многоструйной радиальной. Для лучшего охлаждения ротора на его поверхности протачивают по винтовой линии канавки шириной и глубиной до 5-6 мм.
4.5. Реакция якоря синхронной машины
Под реакцией якоря в синхронных машинах понимают воздействие магнитного поля статора (якоря) на магнитное поле ротора. Реакция якоря оказывает сильное влияние на все электромагнитные процессы в машине. Явление реакции по определению связано с магнитным полем статора, поэтому характер и степень влияния реакции определяется током статора, т.е. нагрузкой машины.
Рассмотрим этот процесс на примере синхронного генератора показанного на рис. 4.1. Изобразим вращающееся магнитное поле ротора вектором . При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС , отстающую от потока на. Ток статора создает магнитный поток статора , совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах .
При чисто активной нагрузке (R) ток и магнитный поток статора совпадают по фазе с и результирующий магнитный поток машины оказывается смещенным относительно потока ротора на некоторый угол в сторону запаздывания. В результате смещения потока магнитное поле ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими. Несмотря на то, что в результате смещения сбегающие края полюсов подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и деформируется.
При чисто индуктивной нагрузке (L) ток статора и магнитный поток отстают от ЭДС на . Поток статора оказывается направленным встречно по отношению к потоку ротора и сильно размагничивает машину. Однако, в отличие от активной нагрузки, искажения поля за счет смещения потока не происходит.
При чисто емкостной нагрузке (C) ток статора и магнитный поток опережают ЭДС на и поле в машине усиливается потоком реакции, направленным согласно с потоком ротора. Искажения поля в этом случае также не происходит, а усиление поля вследствие насыщения оказывается выраженным слабо.
В случае активно-реактивной нагрузки (RL и RC) поток статора оказывается смещенным на угол меньший, чем , в сторону запаздывания или опережения. В этом случае магнитный поток статора , можно разложить на продольную и поперечную составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
Таким образом, реакция якоря в синхронной машине изменяет величину и направление магнитного потока, в отличие от асинхронной машины, у которой . Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
Магнитный поток вызывает искажение магнитного поля ротора, которое проявляется в статоре в виде ЭДС . Так как поток линейно связан с током статора , то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде .
4.6. Уравнение статора и векторная диаграмма
Для статора синхронной машины можно составить уравнение Кирхгофа, аналогично тому, как это делается для асинхронных машин. В нем нужно учесть падение напряжения на активном сопротивлении обмотки статора R1I1; ЭДС, наводимую магнитным потоком ротора ; ЭДС потока рассеяния и ЭДС, наводимую потоком реакции якоря, .
(4.2)
Знак плюс в уравнении статора соответствует режиму работы машины двигателем, а минус – генератором. Индуктивные сопротивления рассеяния и реакции якоря можно рассматривать как суммарное синхронное сопротивление. Можно также упростить уравнение с учетом того, что обычно R1<<XC.
Схема замещения, соответствующая упрощенному уравнению статора показана на рис. 4.12, а. Направление тока в генераторном режиме показано сплошной стрелкой, а в двигательном – штриховой.
На рис. 4.12, б приведена векторная диаграмма для режима работы двигателем, соответствующая уравнению . Здесь вектор ЭДС отстает от напряжения на угол нагрузки , а вектор тока статора – на от вектора , замыкающего треугольник векторов напряжений.
При работе синхронной машины в режиме генератора на сеть с тем же напряжением направление тока поменяется на противоположное и уравнение статора примет вид . Изменится также знак угла нагрузки . Теперь ЭДС будет опережать и векторная диаграмма примет, показанный на рис 4.12, в.
4.7. Электромагнитный момент и угловые характеристики
При рассмотрении принципа работы синхронных машин было установлено, что вращающий момент является синусной функцией угла нагрузки . Этот же результат можно получить из баланса мощностей машины.
Активная мощность, потребляемая машиной из сети равна
, (4.3)
где - число фаз обмотки статора. Из векторной диаграммы следует, что:
. (4.4)
Кроме того, из прямоугольных треугольников abc и adc получим . Отсюда активная мощность:
. (4.5)
Если пренебречь относительно небольшими тепловыми потерями в статоре, то активная мощность будет равна электромагнитной мощности, т.е. мощности передаваемой магнитным полем из статора в ротор, где - синхронная угловая частота вращения ротора, - угловая частота питающей сети, а p - число пар полюсов машины. Отсюда вращающий момент синхронной машины равен:
. (4.6)
При постоянном напряжении сети максимальный момент машины зависит только от ЭДС потока ротора, т.е. от величины тока возбуждения. В случае явнополюсной машины индуктивное сопротивление реакции якоря по продольной R1I1 и поперечной оси Xaq будут разными . Соответственно разными будут и синхронные сопротивления по этим осям –
;
.
Подставляя эти выражения в уравнение момента, получим:
. (4.7)
Это выражение справедливо для любого типа ротора как явнополюсного, таки неявнополюсного. У неявнополюсного ротора . Тогда второе слагаемое обращается в нуль, и мы придем к полученному ранее выражению. Таким образом, в случае магнитной асимметрии ротора электромагнитный момент складывается из двух составляющих: основного и реактивного моментов.
Зависимость электромагнитного момента машины от угла нагрузки называется угловой характеристикой. В общем случае она представляет собой сумму двух синусоид основного и реактивного моментов показанных на рис. 4.13. Максимум основного момента приходится на угол , а реактивного – .
Участки характеристики с положительной производной соответствуют устойчивым режимам работы машины, т.е. углам нагрузки . На этих участках увеличение момента нагрузки вызывает увеличение угла нагрузки и соответственно электромагнитного момента вплоть до статического состояния, когда момент нагрузки будет уравновешен моментом машины. На участках с увеличение угла нагрузки будет приводить к снижению электромагнитного момента и увеличению рассогласования с моментом на валу. Если при этом момент нагрузки не превышает максимального момента машины, то ротор повернувшись чуть более чем на пол-оборота придет в точку статического равновесия на устойчивом участке угловой характеристики. Очевидно, что синхронная работа машины возможна только если нагрузочный момент не превышает максимальный .
Механическая характеристика синхронной машины показана на рис. 4.14. Она представляет собой отрезок прямой линии, проходящий через точку синхронной скорости n1 параллельно оси момента и ограниченный значениями угловой характеристики. Для каждой точки механической характеристик можно определить угол нагрузки, спроектировав эту точку на участок устойчивой работы обращенной угловой характеристики.
4.8. Пуск синхронного двигателя
Синхронные машины в принципе не имеют пускового момента и не могут самостоятельно разгоняться до синхронной скорости, т.к. при включении статора в сеть его магнитное поле и ротор вращаются с разными скоростями. Если частоту вращения поля статора в пространстве обозначить , а частоту вращения ротора – , то скольжение ротора будет равно -
, (4.8)
где ; ; - число пар полюсов машины; - частота сети; – частота скольжения, т.е. частота, с которой изменяются во времени периодические величины в электромагнитных процессах в роторе. Поэтому угол нагрузки является функцией времени – , а электромагнитный момент изменяется во времени по синусоидальному закону:
.
При этом его среднее за период частоты скольжения значение остаётся равным нулю. Для пуска ротор синхронной машины снабжается специальной пусковой короткозамкнутой обмоткой, аналогичной обмотке ротора асинхронного двигателя типа беличья клетка, которая в асинхронном режиме создаёт электромагнитный момент . Кроме синхронного и асинхронного вращающих моментов на ротор машины действует некоторый тормозной момент или момент нагрузки . С учётом всех приложенных моментов движение ротора можно описать с помощью второго закона Ньютона следующим образом:
, (4.9)
где J- суммарный момент инерции ротора и нагрузки, приведённый к оси ротора.
Для анализа процесса разгона ротора в первом приближении предположим, что его скорость изменяется достаточно медленно так, что в пределах периода скольжение ротора остаётся постоянным. Это соответствует приближённому равенству , т.е. угловое ускорение ротора определяется только синхронным моментом , т.е.
.
Отсюда составляющая угловой скорости, соответствующая этому ускорению будет:
,
т.е. она также будет изменяться во времени по синусоидальному закону с максимальным положительным значением растущим по мере уменьшения скольжения S и разгона машины.
.
Для реактивной машины, с учётом того, что её момент является функцией двойного угла это выражение примет вид:
.
Таким образом, в процессе разгона мгновенное значение скорости вращения ротора будет определяться медленно изменяющейся составляющей , обусловленной действием моментов нагрузки и короткозамкнутой обмотки, и пульсирующей составляющей , обусловленной взаимодействием магнитных полей статора и ротора.
В тот момент, когда максимальное положительное значение синхронной составляющей скорости вращения ротора станет равным или большим разности скоростей вращения поля статора и ротора (tc) машина войдёт в синхронизм, т.е.
. (4.10)
Отсюда максимальное скольжение ротора, при котором войдёт в синхронизм машина с возбуждёнными полюсами –
, (4.11)
а реактивная машина –
. (4.12)
Условием самозапуска двигателя является условие . Из полученных выражений следует, что это условие всегда выполняется при достаточно низкой частоте сети и безусловно всегда при постоянном токе . Условие самозапуска теоретически может быть выполнено также при малом моменте инерции J.
Выражения для скольжения синхронизации показывают, что оно определяется соотношением собственной частоты свободных угловых колебаний ротора и частоты сети . Чем больше собственная частота колебаний, тем легче происходит запуск синхронного двигателя.
На рис. 4.15. показан процесс пуска синхронного двигателя с помощью короткозамкнутой обмотки без нагрузки. При включении в сеть в точке a ротор под действием асинхронного момента разгоняется до скорости, соответствующей скольжению входа в синхронизм (точка b), а затем быстро (не более, чем за период приведённой частоты скольжения) втягивается в синхронизм. При этом возникает постепенно затухающий колебательный переходный процесс установки угла нагрузки (точка c'). Если затем момент нагрузки возрастает и становится равным максимальному (точка d), то машина выходит из синхронизма и переходит на характеристику асинхронного момента (точка e), в которой будет находиться до тех пор, пока момент нагрузки не уменьшится до значения, соответствующего скольжению синхронизации (точка b).
При пуске синхронных машин с электромагнитным возбуждением обмотку возбуждения замыкают активным сопротивлением в 8-10 раз большим собственного сопротивления обмотки. Это делается для того, чтобы исключить перенапряжения в обмотке за счет ЭДС наводимой в ней вращающимся полем статора. Когда скорость вращения ротора за счет асинхронного момента короткозамкнутой пусковой обмотки достигнет примерно 95% от синхронной скорости сопротивление отключают и подключают обмотку к источнику постоянного тока. При этом возникает синхронный момент , под действием которого ротор втягивается в синхронизм так, как это было описано выше. Обмотку возбуждения нельзя замыкать накоротко для получения дополнительного асинхронного момента, т.к. при этом на механической характеристике асинхронного момента появится провал примерно на половине синхронной скорости и ротор может остановить разгон на этом участке.
В машинах большой мощности вместо встроенной в ротор короткозамкнутой обмотки используют асинхронный двигатель, соединенный с валом синхронного.
4.9. Синхронный генератор
Статор синхронной машины по конструкции не отличается от статора асинхронного двигателя. В пазах статора размещается трехфазная, двухфазная или однофазная обмотки. Заметное отличие имеет ротор, который принципиально представляет собой постоянный магнит или электромагнит. Это налагает особые требования на геометрическую форму ротора. Любой магнит имеет полюса, число которых может быть два и более.
На рис. 4.16. приведены две конструкции генераторов, с тихоходным и быстроходным ротором. Быстроходными бывают, как правило, турбогенераторы. Количество пар магнитных полюсов у них равно единице. Чтобы такой генератор вырабатывал электрический ток стандартной частоты f = 50 Гц, его необходимо вращать с частотой:
.
На гидроэлектростанциях вращение ротора зависит от движения водяного потока. Но и при медленном вращении такой генератор должен вырабатывать электрический ток стандартной частоты f = 50 Гц. Поэтому для каждой гидроэлектростанции конструируется свой генератор, на определенное число магнитных полюсов на роторе.
Принцип действия синхронного генератора основан на явлении электромагнитной индукции. Ротор с магнитными полюсами создает вращающееся магнитное поле, которое, пересекая обмотку статора, наводит в ней ЭДС. При подключении к генератору нагрузки генератор будет являться источником переменного тока.
Величина наводимой в обмотке статора ЭДС количественно связана с числом витков обмотки и скорости изменения магнитного потока:
. (4.13)
Переходя к действующим значениям, выражение ЭДС можно записать в виде:
, (4.14)
где n - частота вращения ротора генератора; Ф - магнитный поток; c - постоянный коэффициент.
При подключении нагрузки напряжение на зажимах генератора в разной степени меняется. Так, увеличение активной нагрузки не оказывает заметного влияния на напряжение. В то же время индуктивная и емкостная нагрузки влияют на выходное напряжение генератора. В первом случае рост нагрузки размагничивает генератор и снижает напряжение, во втором происходит его подмагничивание и повышение напряжения. Такое явление называется реакцией якоря. Для обеспечения стабильности выходного напряжения генератора необходимо регулировать магнитный поток. При его ослаблении машину надо подмагнитить, при увеличении - размагнитить. Делается это путем регулирования тока, подаваемого в обмотку возбуждения ротора генератора.
Синхронные генераторы малой мощности используются как автономные источники питания. Их мощность соизмерима с мощностью подключенной нагрузки, поэтому нагрузка оказывает значительное воздействие на электромагнитные процессы в таком генераторе. В самом общем виде влияние нагрузки на генератор отражается внешней характеристикой.
Внешней характеристикой называется зависимость падения напряжения в нагрузке, подключённой к обмотке статора, от величины протекающего в ней тока. На рис. 4.17, а приведены внешние характеристики синхронного генератора для различных видов нагрузки. Все характеристики нелинейны и монотонны. Они исходят из точки холостого хода, где напряжение на выходе генератора UXX в точности равно ЭДС , наводимой магнитным потоком ротора в обмотках статора.
При активной и активно-индуктивной нагрузке внешняя характеристика синхронного генератора имеет отрицательный наклон на всём интервале от точки холостого хода (UXX) до точки короткого замыкания (IКЗ).
При активно-емкостной нагрузки внешняя характеристика имеет участок, на котором напряжение на выходе генератора превышает ЭДС холостого хода. Механизм появления такого участка поясняют векторные диаграммы на рис. 4.17, б,в. Если изменять характер нагрузки в пределах -, сохраняя при этом постоянным значение тока (например, его номинальное значение I1ном ), то конец вектора будет описывать на комплексной плоскости дугу полуокружности. Вектор падения напряжения , соответствующий суммарной ЭДС потока рассеяния и реакции якоря, перпендикулярен вектору тока , и в сумме с падением напряжения в нагрузке образует вектор ЭДС холостого хода , т.е. ЭДС потока ротора. Эта ЭДС не зависит от величины и характера нагрузки. Не зависит от них и синхронное сопротивление XC, поэтому при вращении вектора тока вектор будет поворачиваться относительно точки конца вектора и его начало будет описывать полуокружность, являющуюся геометрическим местом точек конца вектора падения напряжения в нагрузке . На рис. 4.17, б приведены две системы векторов для активно-индуктивной и активно-емкостной нагрузок.
Если с помощью вектора в качестве радиуса построить дугу окружности AB, то она пересечёт полуокружность вектора в точке B, которая и определит граничное значение угла , начиная с которого () напряжение на выходе генератора при данном токе будет превосходить ЭДС холостого хода ротора. Из равностороннего треугольника 0AB (рис. (в)), образованного векторами , и , на высоте которого располагается вектор тока , легко можно определить предельный фазовый угол нагрузки:
. (4.15)
4.10. Синхронный двигатель
Конструкция синхронного двигателя такая же, как и у синхронного генератора. При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой (4.1).
Ротор, являющийся часто электромагнитом, будет строго следовать за вращающимся магнитным полем, т.е. его частота вращения n2 = n1. Рассмотрим принцип действия синхронного двигателя на условной модели рис. 4.18. Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N - S.
Ротор двигателя тоже представляет собой систему электромагнитов S - N, которые "сцеплены" с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора. Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол. Однако "магнитное сцепление" ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2 = n1). При больших значениях ротор может выйти из "сцепления" и двигатель остановится.
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cos = 1 и не потребляют при этом реактивной мощности из сети, а при работе с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях. Максимальный момент синхронного двигателя пропорционален U, a у асинхронного двигателя U2. Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать их надежность работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных, благодаря чему к. п. д. синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором. Пуск и регулирование скорости вращения синхронных двигателей также сложнее.
Главное преимущество синхронного двигателя перед асинхронным - это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо "разогнать" до подсинхронной скорости каким-то дополнительным устройством. Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным.
Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм. Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу. Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой.
В последнее время используется так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя рис. 4.19.
В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем - как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику постоянного тока.
4.11. Реактивный синхронный двигатель
Реактивные синхронные двигатели отличаются от обычных отсутствием собственного магнитного поля ротора. Вращающий момент в этих машинах создается за счет магнитной асимметрии ротора. Ротор реактивного двигателя, представляет собой стальной цилиндр, набранный из пластин, вид которых показан на рисунке. В пластинах ротора сделаны отверстия, в которые после сборки заливается алюминий и образуется короткозамкнутая пусковая обмотка, аналогичная обмотке ротора асинхронного двигателя. Магнитная асимметрия ротора может создаваться выемками различной формы на внешней поверхности цилиндра или асимметрией внутренних каналов. В первом случае получается явнополюсный ротор, во втором - неявнополюсный. Оба способа позволяют изготавливать роторы с различным числом пар полюсов.
Основным достоинством реактивного двигателя по сравнению с асинхронным является: неизменность скорости вращения, а по сравнению с обычными синхронными двигателями - простота, надежность и малая стоимость ротора, а также отсутствие источника питания необходимого для возбуждения магнитного поля.
Выражение для вращающего момента реактивных двигателей получается как частный случай из общего уравнения момента, если в нем исключить основную составляющую тогда:
.
Максимум момента соответствует углу нагрузки . Величина максимального момента зависит от соотношения индуктивных сопротивлений по продольной и поперечной оси и . В явнополюсных двигателях обычной конструкции отношение и максимальный реактивный момент составляет не более 0,25 от основного. В реактивных машинах для увеличения момента увеличивают отношение , но все равно эти машины имеют в 2-3 раза меньшую мощность, чем асинхронные двигатели тех же габаритов.
Кроме того реактивные двигатели имеют низкие энергетические показатели. Малый коэффициент мощности объясняется большим намагничивающим током, потребляемым из сети, что ведет также к снижению КПД за счет повышенных тепловых потерь в обмотке статора.
Мощность реактивных двигателей не превышает нескольких сотен ватт и применяются они в системах звуко- и видеозаписи, а также в других устройствах требующих работы с постоянной скоростью вращения.
4.12. Синхронный компенсатор
Синхронная машина, подключенная к сети большой мощности, обладает способностью регулировать реактивную составляющую тока за счет изменения тока возбуждения. Из упрощенного уравнения синхронного генератора следует, что ток статора равен:
. (4.16)
Для сети большой мощности . Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным является перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) нередко возникает необходимость работы синхронных компенсаторов также в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность так как в этих случаях напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения. Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
;
. (4.17)
Синхронные компенсаторы лишены приводных двигателей и с точки зрения режима своей работы в сущности являются синхронными двигателями, работающими на холостом ходу. Поэтому синхронные компенсаторы загружены также небольшим активным током и потребляют из сети активную мощность для покрытия своих потерь. Компенсаторы строятся на мощность до SH = 100 000 КВА. имеют явнополюсную конструкцию, обычно с 2р = 6 или 8. Мощные компенсаторы имеют водородное охлаждение.
Для осуществления асинхронного пуска все синхронные компенсаторы снабжаются пусковыми обмотками в полюсных наконечниках или их полюсы делаются массивными. При этом используется способ прямого, а в необходимых случаях - способ реакторного пуска. В некоторых случаях мощные компенсаторы пускаются в ход также с помощью пусковых фазных асинхронных двигателей, укрепляемых с ними на одном валу. Для синхронизации с сетью при этом обычно используется метод самосинхронизации.
Так как синхронные компенсаторы не развивают активной мощности, они изготовляются с меньшим воздушным зазором, чем генераторы и двигатели, и соответственно этому величины Xd и Xq у них больше. Уменьшение зазора позволяет облегчить обмотку возбуждения и удешевить машину.
При отсутствии механической нагрузки на валу машины угол нагрузки будет равен нулю и векторы ЭДС потока ротора и напряжения статора будут совпадать по направлению. Если установить в обмотке возбуждения такой ток, при котором , то ток статора будет равен нулю. Увеличение тока возбуждения вызовет увеличение ЭДС и разность между ней и напряжением сети компенсируется падением напряжения , при этом машина будет отдавать в сеть чисто индуктивный ток. Снижение тока возбуждения изменит картину на противоположную и ток отдаваемый в сеть будет емкостным. Таким образом, при отсутствии механической нагрузки изменение тока возбуждения будет приводить к возникновению чисто реактивного тока статора. В случае машина называется перевозбужденной, а при - недовозбужденной. Перевозбужденная машина по отношению к сети эквивалентна емкости, а недовозбужденная – индуктивности.
Если построить зависимость тока статора от тока возбуждения синхронной машины при постоянном напряжении сети и постоянной мощности на валу , то они будут иметь вид, показанный на рис. 4.22. По сходству с начертанием соответствующей буквы они называются U-образными. Минимум тока статора на этих характеристиках соответствует чисто активному или нулевому току. При уменьшении или увеличении тока возбуждения в токе статора появляется реактивная составляющая, увеличивающая суммарный ток. Слева характеристики ограничены линией AB, соответствующей максимальному углу нагрузки . Увеличение нагрузки на валу () вызывает увеличение активной составляющей тока статора и соответствующий подъем характеристики. Левая ветвь характеристики соответствует режиму недовозбуждения, а правая – перевозбуждения. На практике компенсаторы чаще всего работают в режиме перевозбуждения, т.к. промышленная сеть в основном нагружена асинхронными двигателями обладающими относительно низким коэффициентом мощности и создающими дефицит реактивной мощности.
Наибольшие значения тока и мощности в недовозбужденном режиме:
, (4.18)
и соответствующая полная мощность:
; (4.19)
. (4.20)
В большинстве случаев в недовозбужденном режиме требуются меньшие мощности, чем в перевозбужденном, и указанные значения отношения удовлетворяют эксплуатационным требованиям, но в некоторых случаях необходима большая мощность Sнв. Этого можно достигнуть увеличением зазора, однако это приводит к удорожанию машины, и поэтому в последнее время ставится вопрос об использовании режима с отрицательным током возбуждения. Поскольку синхронный компенсатор по активной мощности загружен только потерями, то он может работать устойчиво также с небольшим отрицательным возбуждением.
Несмотря на то, что любая синхронная машина может работать в качестве компенсатора, они изготавливаются как специализированный тип машины. Это связано с тем, что они загружены в основном реактивным током, поэтому можно облегчить конструкцию, уменьшив массу, габариты и стоимость.
4.13. Гистерезисные синхронные двигатели.
Гистерезисный двигатель отличается от других типов машин с круговым вращающимся магнитным полем конструкцией ротора (рис. 4.23, а). Он представляет собой полый цилиндр или пакет, собранный из колец магнитотвердого материала (1), насаженный на цилиндрическую втулку (2) из магнитного или немагнитного материала, закрепленную на валу ротора (3).
Пакет колец ротора называется активным слоем, и происходящие в этом слое процессы определяют свойства гистерезисного двигателя. Материал для активного слоя выбирают с петлей гистерезиса близкой к прямоугольной форме. На рис. 4.23, б сплошной линией показана такая петля и для сравнения штриховой линией дана петля обычной электротехнической стали.
Принципиальным отличием гистерезисного двигателя от синхронного двигателя с постоянными магнитами заключается в том, что активный слой ротора намагничивается магнитным полем статора при пуске, поэтому в дальнейшем он может перемагничиваться этим же полем. Однако его намагниченность меньше намагниченности постоянных магнитов, поэтому он работает в режиме недовозбуждения.
Принцип работы гистерезисного двигателя поясняет рис 4.24. В синхронном режиме, т.е. когда ротор вращается со скоростью магнитного поля, материал ротора намагничен и машина работает как синхронный двигатель с постоянными магнитами. При отсутствии нагрузки на валу (рис. 4.24, а) поля ротора и статора взаимодействуют с силой F, направленной под разноименными полюсами встречно и в сумме равной нулю. Возникновение тормозного момента на валу приведет к расхождению осей магнитных полей на угол и появлению электромагнитного момента, компенсирующего момент нагрузки (рис. 4.24, б). Такая картина процессов в двигателе полностью идентична работе двигателя с постоянными магнитами на роторе. Однако при дальнейшем увеличении нагрузки на валу угол увеличится до угла магнитного запаздывания (рис. 4.24, в). Материал ротора начнет перемагничиваться и ось его магнитного поля будет смещаться вслед за полем статора, сохраняя при этом постоянное значение угла нагрузки и, следовательно, постоянное значение электромагнитного момента. Вал ротора в этом режиме может вращаться с любой скоростью меньше синхронной, т.е. двигатель будет работать в асинхронном режиме. Наглядно представить такой процесс можно с помощью механической модели показанной на рисунке 4.25. Здесь поля статора и ротора представлены постоянными магнитами. Магнит ротора лежит на диске и удерживается на нем силой трения. Если поле статора вращается со скоростью n1 и момент на валу диска равен нулю (рис. 4.25, а), то магнит ротора также будет вращаться со скоростью n1, передавая вращение диску за счет момента трения. Угол между осями магнитов при этом будет равен нулю. Возникновение нагрузочного момента на валу диска приведет к расхождению осей полюсов магнитов и появлению электромагнитного момента, компенсирующего нагрузочный момент (рис. 4.25, б).
Диск и магнит ротора будут вращаться синхронно, удерживаемые в зацеплении моментом сухого трения MГ. Если нагрузочный момент увеличится и станет больше момента трения MГ (рис. 4.25, в), то магнит ротора будет проскальзывать по поверхности диска, вращаясь при этом с синхронной скоростью вслед за полем статора. Магнит ротора не выйдет из синхронизации, т.к. при этом . Момент сухого трения, действующий на магнит ротора, не зависит от скорости вращения, поэтому угол нагрузки будет оставаться постоянным и равным некоторому значению , определяемому параметрами момента трения (коэффициентом трения, силой прижатия магнита к диску и т.п.). Таким образом, магниты (поля) статора и ротора будут работать в синхронном режиме, а вал двигателя – в асинхронном.
Максимально возможный момент MГ, передаваемый гистерезисным двигателем нагрузке, определяется свойствами материала активного слоя ротора. Эти свойства, в частности, отражаются формой петли гистерезиса. У материала с прямоугольной петлей гистерезиса угол магнитного запаздывания . Материал с нулевой площадью петли имеет . Чем больше значение , тем больше величина гистерезисного момента MГ при прочих равных условиях. Современные материалы активного слоя имеют .
Постоянный электромагнитный момент гистерезисного двигателя в асинхронном режиме, т.е. от нулевой до синхронной скорости вращения, является их главным преимуществом по отношению к другим типам машин. Это единственная синхронная машина, обладающая свойством самозапуска. Описанные выше свойства двигателя находят отражение в механической и угловой характеристиках представленных на рис. 4.26. Механическая характеристика в двигательном режиме, помимо участка синхронной работы 1-3, имеет также асинхронный участок 3-5. На участке 3-5 происходит перемагничивание активного слоя ротора и электромагнитный момент равен гистерезисному моменту MГ.
На участке 1-3 машина работает как синхронный двигатель с постоянными магнитами и угловой характеристикой . Точка 3 характеристик соответствует выходу из синхронизма, после чего начинает изменяться и неограниченно возрастать. Принципиально гистерезисный двигатель может работать как в синхронном, так и в асинхронном режиме, однако работа в асинхронном режиме неэкономична, т.к. потери на перемагничивание возрастают с частотой скольжения.
Помимо самозапуска, к достоинствам гистерезисного двигателя можно отнести: простоту и надежность конструкции; бесшумность; большой пусковой момент ; плавность входа в синхронизм; относительно высокий КПД; малую кратность пускового тока ().
Недостатками являются; низкий коэффициент мощности (0,4-0,5) и высокая стоимость.
4.14. Шаговые синхронные двигатели
Шаговые двигатели служат для преобразования импульсного или кодового сигнала в угловое перемещение. В последнее время в связи с развитием компьютерной техники и технологии их область применения постоянно расширяется.
Шаговые двигатели являются синхронными электрическим машинами, у которых обмотки статора питаются от источника постоянного тока. Как и обычные двигатели они бывают активными (с возбужденным ротором) и реактивными. Активный ротор позволяет получить больший вращающий момент и обеспечить фиксацию положения при обесточенных обмотках статора.
На статоре шагового двигателя располагаются несколько обмоток, подключаемых в определенной последовательности к источнику постоянного тока с помощью электронного коммутатора. На рис. 4.27. схематически изображен шаговый реактивный двигатель с тремя обмотками на статоре. На временной диаграмме показаны токи в обмотках. На первом участке ток подается в обмотку 1. Она формирует неподвижное магнитное поле, ось полюсов которого совпадает с геометрической осью обмотки.
Ротор разворачивается и ориентируется по оси магнитного поля. Затем к источнику питания подключается обмотка 2. Обе обмотки создают магнитное поле с осью полюсов, проходящей между осями обмоток и ротор поворачивается на 30. На следующем интервале обмотка 1 отключается и остается включенной обмотка 2. При этом ротор поворачивается еще на 30, ориентируясь вдоль ее оси. Далее подключается обмотка 3 и алгоритм циклически повторяется, вызывая дискретное перемещение ротора. Коммутацию обмоток в любой момент можно остановить и ротор останется в положении, соответствующем состоянию включенных обмоток.
Угловое смещение ротора при каждой коммутации называется шагом. В каждом статическом состоянии между коммутациями шаговый двигатель работает как обычный синхронный двигатель и имеет угловую характеристику, соответствующую его типу (активный или реактивный). Переключение обмоток соответствует переходу рабочей точки на новую угловую характеристику. Рассмотрим этот процесс на примере, показанном на рис. 3.13. Пусть двигатель нагружен моментом MH, тогда его рабочая точка на исходной характеристике будет в точке (а). Коммутация обмоток соответствует формированию новых угловых характеристик с возможными шагами , ,или. . Непосредственно после коммутации рабочая точка двигателя окажется в точках 1, 2 или 4, в зависимости от величины шага. Точка 1 находится на устойчивом участке угловой характеристики и из нее ротор перейдет в точку 1’, сместившись на шаг влево. Точка 2 расположена на границе устойчивости, но и из нее ротор сместится в точку 2’, отработав шаг , т.к. приращение момента при коммутации будет положительным. При шаге приращение момента при коммутации будет равно нулю и при случайном отклонении ротора в ту или иную сторону возникнет вращающий момент увеличивающий это отклонение.
Поэтому ротор может сместиться в точку 3’с переходом через точку максимума, отрабатывая шаг , или в точку 3’’, развернувшись почти на целый оборот в обратную сторону. Это явление называется потерей шага, и оно в принципе недопустимо, т.к. при этом происходит потеря информации о положении ротора. При коммутации обмоток с шагом произойдет переход в точку 4, расположенную на неустойчивом участке угловой характеристики и при этом возникнет отрицательное приращение момента, под действием которого ротор может развернуться только в точку 4’, т.е. в этом случае потеря шага произойдет обязательно. Из предельной характеристики 3 нетрудно сформулировать условие работы двигателя без потери шага. Для этого, необходимо, чтобы момент нагрузки был меньше момента, соответствующего косинусу половины величины шага, т.е.
. (4.21)
Под здесь понимается электрический шаг, т.е. угол, отсчитываемый по полюсному делению машины. Механический шаг равен:
. (4.22)
При уменьшении шага и допустимый нагрузочный момент стремится к .
Различают следующие режимы работы шаговых двигателей.
Статический режим, когда в обмотках статора протекает постоянный ток и магнитное поле неподвижно. Ротор находится в фиксированном положении и может только отклоняться от него на угол нагрузки . Квазистатический режим - режим, когда коммутация обмоток совершается непрерывно, но между моментами переключения электромагнитные и механические переходные процессы полностью заканчиваются и скорость ротора в начале каждого шага равна нулю. Этот режим по существу является последовательностью статических режимов.
Установившийся режим работы, это режим при постоянной частоте коммутации обмоток. Ротор двигателя в этом режиме имеет постоянную среднюю скорость вращения, но совершает периодические и непериодические угловые колебания. Мерой длительности переходных процессов в шаговых двигателях является период или частота собственных колебаний ротора:
, (4.23)
т.е. частота свободных угловых колебаний, которые будет совершать ротор, возвращаясь в состояние равновесия под действие магнитного поля статора. На практике частоту коммутации выбирают из условия . Наименьшую динамическую ошибку обеспечивает режим работы при двойной частоте коммутации . Эту частоту можно считать оптимальной для слабонагруженных приводов.
Помимо частоты собственных колебаний, большое значение для работы двигателей имеет электромагнитная постоянная времени обмо�ток статора
, (4.24)
где - постоянная составляющая индуктивности обмотки статора, - полное активное сопротивление цепи обмотки. Электромагнитные процессы в двигателе можно не учитывать, если .
Кроме указанных режимов работы существуют переходные ре�жимы - пуск, ускорение, замедление, реверс. В этих режимах также не�допустима потеря шагов. Пуск шагового двигателя обычно осуществляется из фиксированного неподвижного состояния путем скачкообразного увеличения частоты коммутации. Пусковые свойства двигателей характеризуются частотой приемистости, т.е. максимально частотой коммутации, при которой возможен пуск без выпадения из синхронизма (без потери шагов). Частота приемистости возрастает с увеличением максимального момента, уменьшением шага, снижением постоянной времени обмоток, величины нагрузки и момента инерции, приведенного к валу ротора. Характерная зависимость относительной частоты приемистости от нагрузки шагового двигателя приведена на рис. 4.29.
Торможение ротора осуществляется скачкообразным прекращением коммутации. Предельная частота торможения, при которой ротор останавливается без потери шагов, как правило, выше частоты приемистости. Реверс осуществляется скачкообразным изменением алгоритма коммутации. Предельная частота реверса всегда меньше частоты приемистости. Шаговые двигатели находят широкое применение в маломощном приводе систем автоматического управления станков, роботов и манипуляторов, в телемеханике и вычислительной технике.
5. Контрольные вопросы
5.1. Устройство и классификация синхронных машин.
5.2. Принцип действия синхронных машин.
5.3. Явнополюсные синхронные машины.
5.4. Неявнополюсные синхронные машины.
5.5. Реакция якоря синхронной машины.
5.6. Уравнение статора и векторная диаграмма синхронной машины.
5.7. Электромагнитный момент и угловые характеристики синхронной машины.
5.8. Пуск синхронного двигателя.
5.9. Синхронный генератор.
5.10. Синхронный двигатель.
5.11. Реактивный синхронный двигатель.
5.12. Синхронный компенсатор.
5.13. Гистерезисные синхронные двигатели.
5.14. Шаговые синхронные двигатели.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Кацман, М.М. Электрические машины [Текст]/ М.М. Кацман. – М.: Академия, 2003. – 496 с.:ил.
2. Пиотровский, Л.М. Электрические машины [Текст]/ Л. М. Пиотровский. – Л.: Энергия, 1972. – 504 с.: ил.
3. Кацман М.М. Лабораторные работы по электрическим машинам и электроприводу [Текст]/ М.М. Кацман. – М.: Академия, 2003. – 256 с.:ил.
4. Электротехнический справочник. Под общей редакцией П. Г. Грудинского. Изд. 5-е, испр.[Текст] - М.: Энергия, 1975. – 776 с.: ил.
5. Вольдек, А.И. Электрические машины. Учебник для студентов высших учебных заведений [Текст] / А.И. Вольдек. – Л.: Энергия, 1978. – 832с.
6. Кулик, Ю.А. Электрические машины [Текст] / Ю.А. Кулик. – М.: Высшая школа, 1966. – 528с.
Александр Николаевич Шпиганович
Кирилл Дмитриевич Захаров
Исследование синхронной машины в генераторном
и двигательном режимах
Методические указания к лабораторной работе №5 по дисциплине
"Электрические машины"
Издаётся в авторской редакции
Подписано в печать Формат 60х84 1/16 Бумага офсетная.
Ризография. Печ. л. 2,1 Тираж 100 экз. Заказ №
Липецкий государственный технический университет
398600 Липецк, ул. Московская, 30
Типография ЛГТУ, 398600 Липецк, ул. Московская, 30
а) б) в)
Рис. 4.2. Конструктивная схема синхронной машины
Рис. 4.3. Ротор с «когтеобразными» полюсами
Рис. 4.4. Ротор синхронной машины
Рис. 4.5. Вращающееся магнитное поле
Рис. 4.6. Магнитное поле машины
Рис. 4.7. Полюсы явнополюсной синхронной машины
Рис. 4.8. Принцип устройства явнополюсной синхронной машины
Рис. 4.9. Принцип устройства неявнополюсной синхронной машины
Рис. 4.10. Схема поперечного разреза турбогенератора
EMBED Visio.Drawing.11 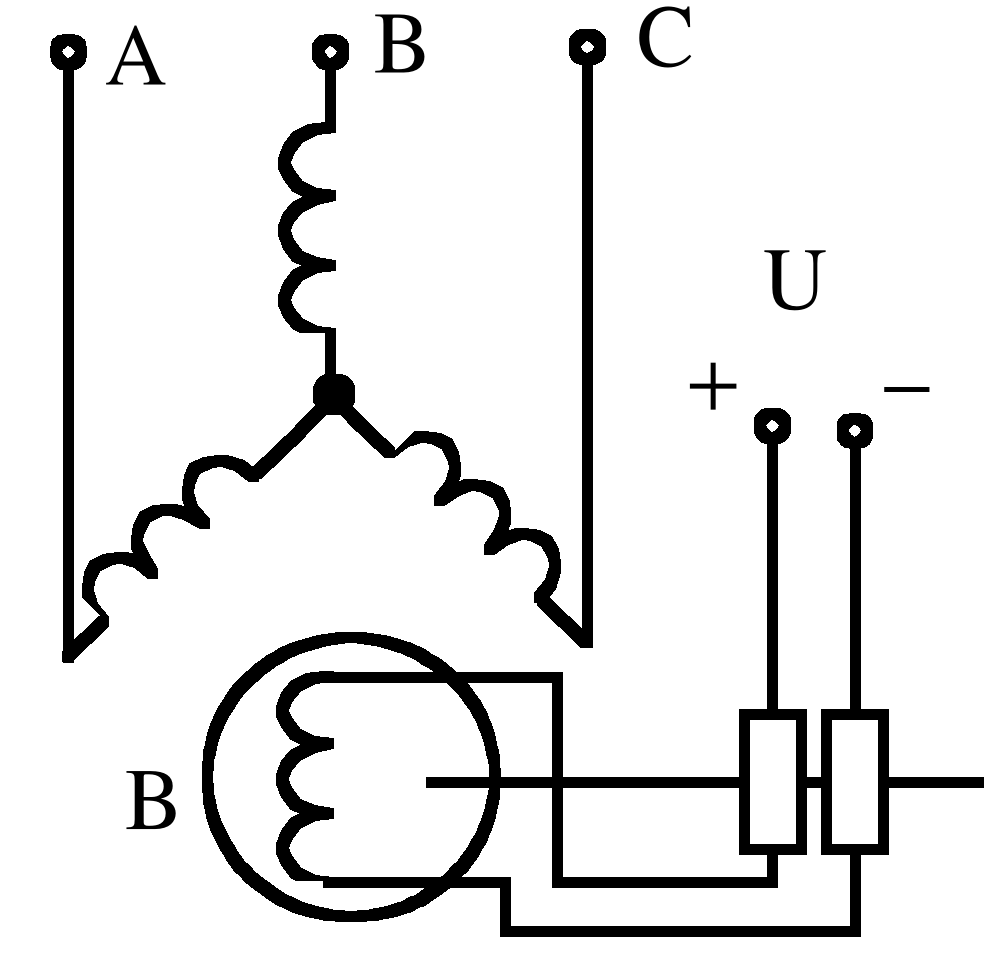
Рис. 4.1. Схема
синхронной машины
EMBED Visio.Drawing.11 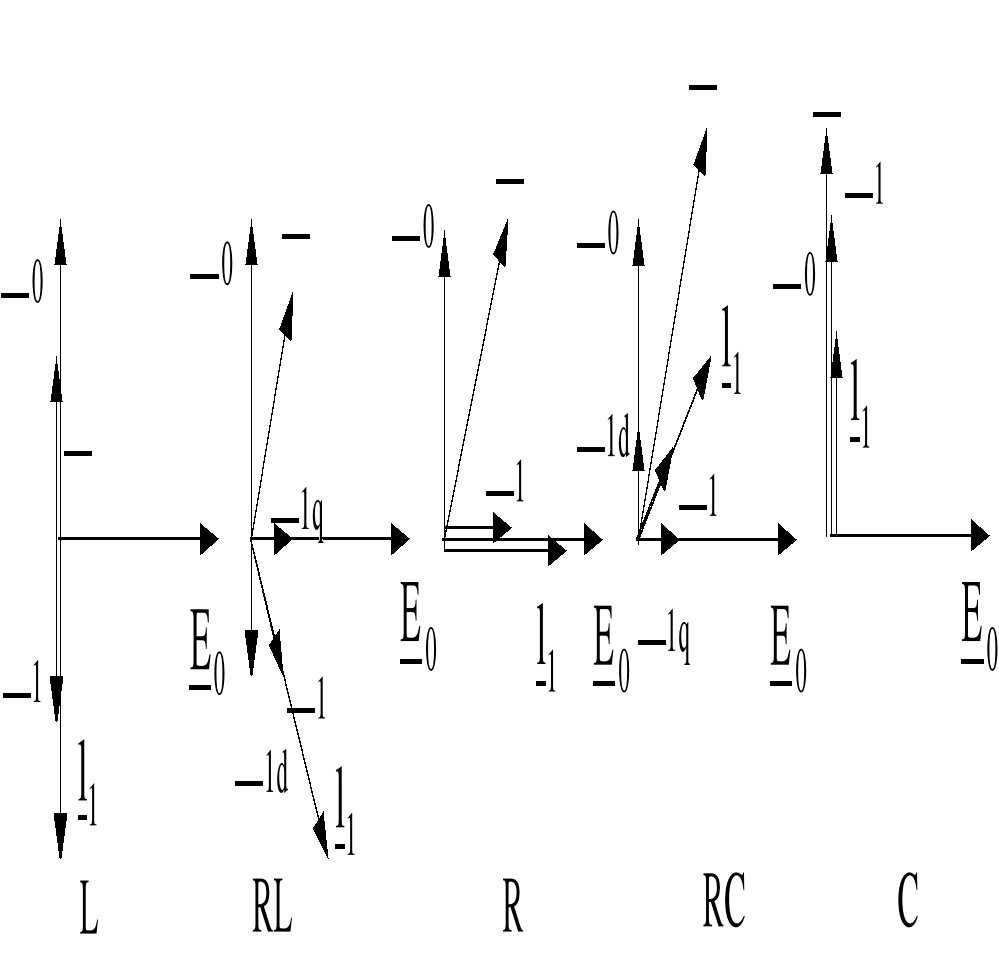
Рис. 4.11. Диаграммы магнитного потока
Рис. 4.18. Принцип действия синхронного двигателя
а) б) в)
Рис. 4.12. Схема замещения и векторная диаграмма
Рис. 4.13. Угловая характеристика
Рис. 4.14. Механическая характеристика
Рис. 4.15. Пуск синхронного
двигателя
Рис. 4.16. Конструкции синхронных генераторов
Рис. 4.17. Внешняя характеристика и синхронные диаграммы
Рис. 4.19. Ротор синхронного двигателя с пусковой обмоткой
EMBED Visio.Drawing.11 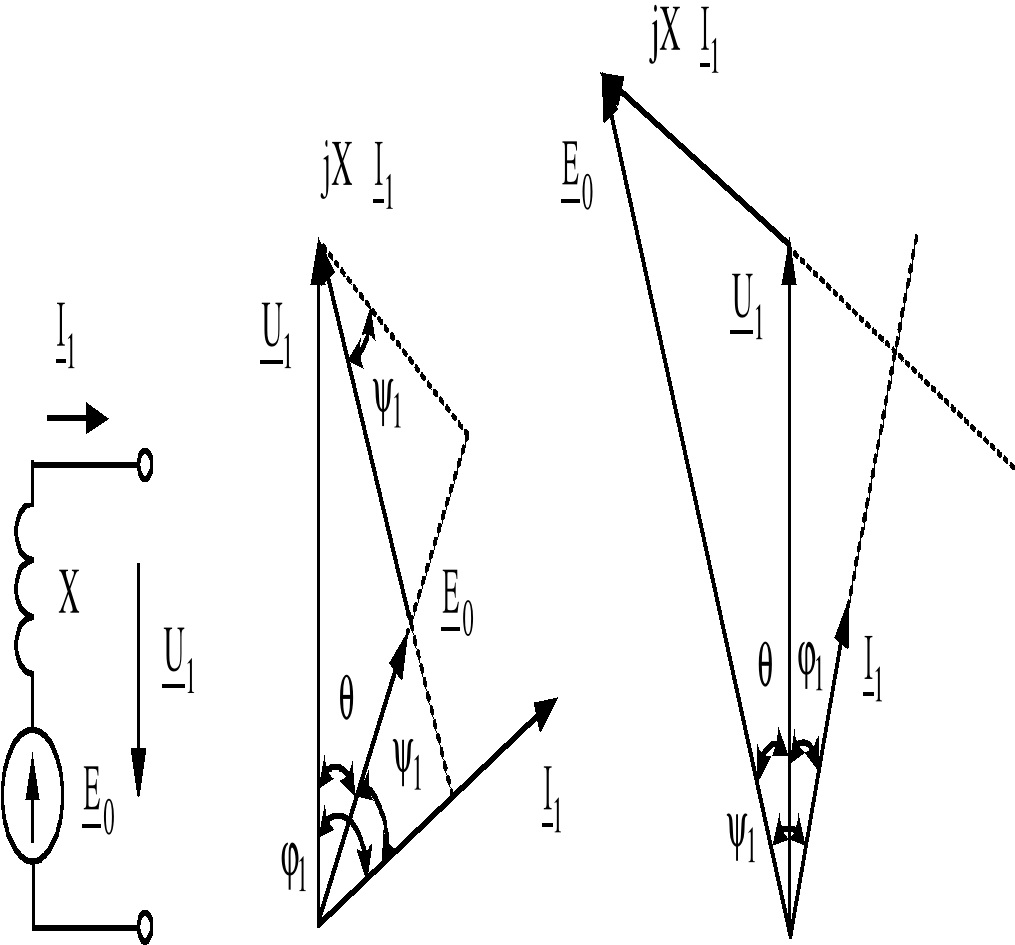
Рис. 4.21. Принцип действия реактивного синхронного двигателя
Рис. 4.22. Зависимость тока статора от тока возбуждения
Рис. 4.23. Гистерезисный двигатель
Рис. 4.24. Принцип работы гистерезисного двигателя
Рис. 4.25. Механическая модель
Рис. 4.26. Механическая и угловая характеристика
а) б) в)
Рис. 4.27. Шаговый двигатель
Рис. 4.28. Работа шагового двигателя
Рис. 4.29. Зависимость относительной частоты приемистости от нагрузки
EMBED Visio.Drawing.11 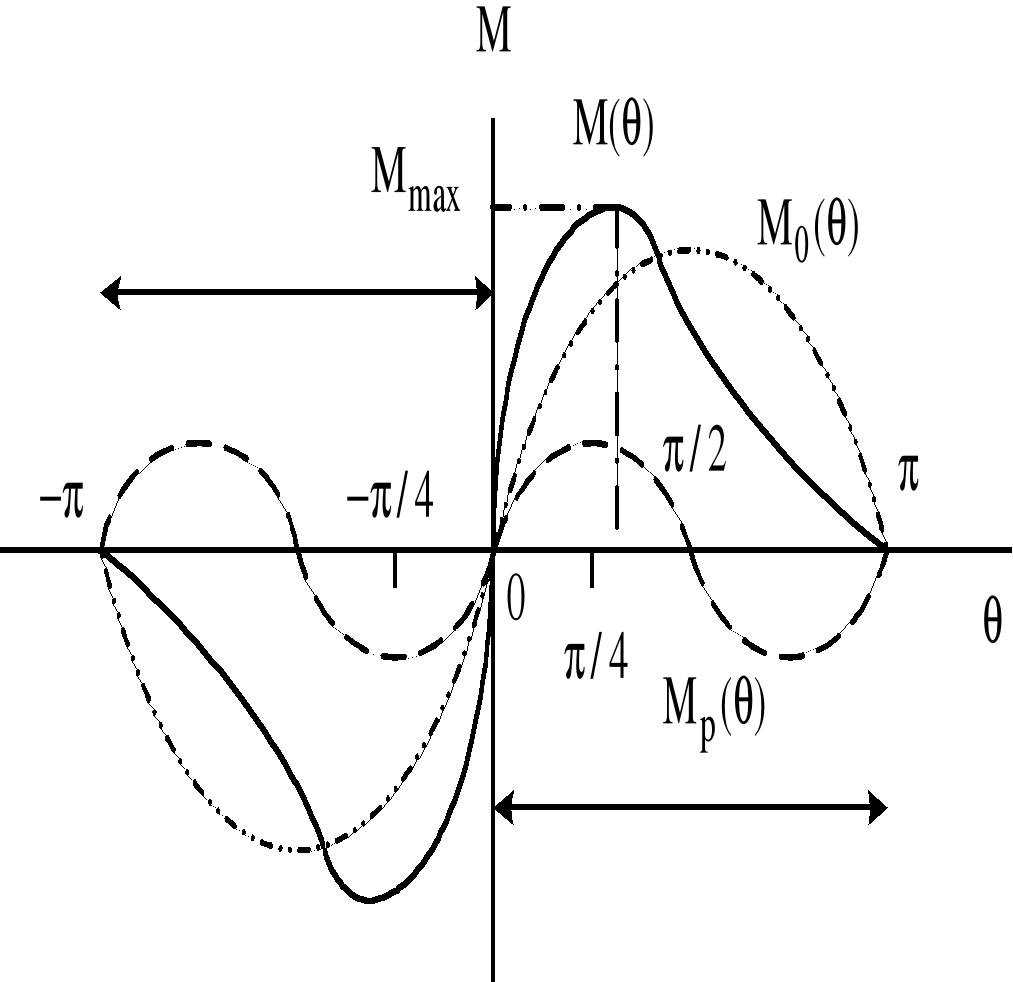
EMBED Visio.Drawing.11 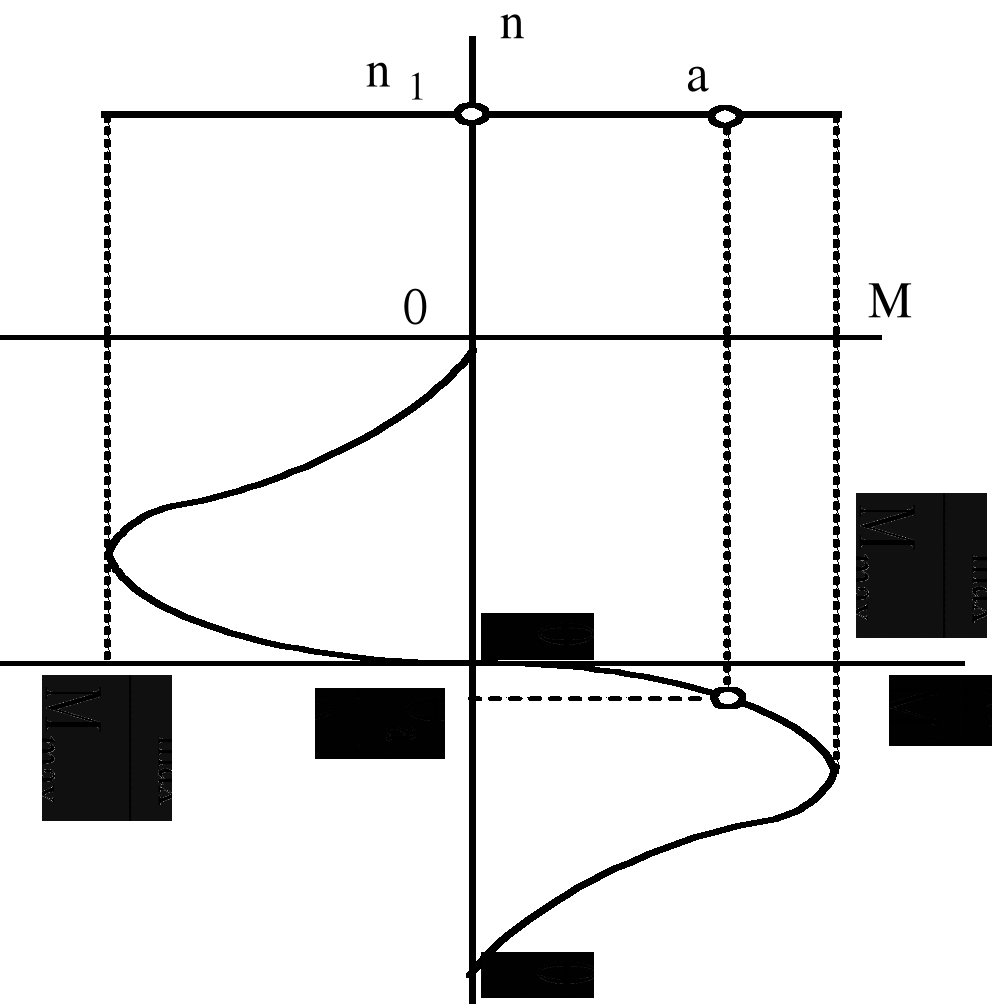
1695
Рис.1.1. Схема исследования синхронной машины
Исследование синхронной машины в генераторном и двигательном режимах