Исследование асинхронного трёхфазного двигателя с короткозамкнутым ротором
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
"ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ"
Кафедра электрооборудования
А.Н. Шпиганович, К.Д. Захаров
Исследование асинхронного трёхфазного
двигателя с короткозамкнутым ротором
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторной работе № 2 по дисциплине
"Электрические машины"
Для студентов специальности 140610
"Электрооборудование и электрохозяйство предприятий,
организаций и учреждений"
Липецк 2007
УДК 621.31 (07)
Ш 835
Шпиганович А.Н. Исследование асинхронного трёхфазного двигателя с короткозамкнутым ротором [Текст]: методические указания к лабораторной работе №2 по дисциплине "Электрические машины"/А.Н. Шпиганович, К.Д. Захаров. – Липецк: ЛГТУ, 2007. – 36 с.
Методические указания предназначены для студентов 2 и 3 курса очной и 4 курса очно–заочной и заочной форм обучения специальности 140610 "Электрооборудование и электрохозяйство предприятий, организаций и учреждений"
Табл. 1. Ил. 25. Библиогр.: 6 назв.
Рецензент Зацепин Е.П. канд. техн. наук, доцент
© А.Н. Шпиганович, К.Д. Захаров, 2007
© ГОУ ВПО "Липецкий государственный
технический университет, 2007
Исследование асинхронного трёхфазного двигателя с
короткозамкнутым ротором
Цель работы – исследовать свойства асинхронного двигателя с помощью механических и рабочих характеристик.
- Оборудование и приборы
В качестве механической нагрузки на валу двигателя M (рис.1.1) используется электромагнитный тормоз YB. Изменяя ток возбуждения тормоза резистором R , можно изменять момент сопротивления Mс от нуля до номинального момента двигателя Mн. Электрическая мощность Р1 , потребляемая обмотками статора из сети, измеряется трехфазным ваттметром PW. Вольтметром PV и амперметром РА контролируется линейные напряжения Uвс и линейный ток Iв двигателя. Частота вращения ротора измеряется тахометром pn , подключенный к тахогенератору BR , который имеет возбуждение от постоянного магнита.
2. Порядок выполнения работы
2.1. Ознакомиться с лабораторным стендом типа ЭВ4СБI, обратив внимание на электрические машины: на исследуемый асинхронный двигатель и электромагнитный тормоз, расположенные в нижней части стенда за стеклом, а также на измерительные приборы, кнопки управления, сигнальные лампочки, размещенные на вертикальной панели. Изучите мнемоническую схему, расположенную на горизонтальной части стенда, относящуюся к данной работе.
2.2. Записать номинальные данные двигателя типа 4А7IА4У3: число фаз m=3, напряжение Uн =220 В, мощность на валу Pн =550 Вт, частота вращения nн =1470 об/мин, кпд = 70 %, cos =0,7. Дополнительные данные: перегрузочная способность Mm / Mн =2,2; кратность пускового момента Mп / Mн = 2; кратность пускового тока Iп / Iн = 4,5; число пар полюсов p=2.
2.3. На мнемонической панели «Асинхронный двигатель» с помощью вилок (13 шт) собрать схему работы. Предел измерения РА - 7,5 А.
2.4. Включить автоматический выключатель с черной ручкой, находящийся справа под крышкой стола. После этого загорится лампочка «Сеть».
2.5. Включить черную кнопку под лампочку «Сеть», вольтметр покажет подводимое напряжение к схеме. Включить черную кнопку «Включение к сети синхронной и асинхронной машин». Ротор начинает вращаться. Показания приборов записать в табл.1.1 в первой строке. Если пуска двигателя не произойдет, проверить положение кнопки «Агрегат-1». Она должна быть включена.
Таблица 1.1
|
№п/п
|
Экспериментальные данные
|
Расчетные данные
|
|
|
U1 , В
|
I1 ,
А
|
Р1 , Вт
|
n2, об/мин
|
M,
Н м
|
Р2, Вт
|
,
%
|
S1, ВА
|
cos
|
S,
%
|
|
1
|
|
|
|
|
Mхх 0
|
|
|
|
|
|
|
2
|
|
|
|
|
0,6
|
|
|
|
|
|
|
3
|
|
|
|
|
1,2
|
|
|
|
|
|
|
4
|
|
|
|
|
1,8
|
|
|
|
|
|
|
5
|
|
|
|
|
2,4
|
|
|
|
|
|
|
6
|
|
|
|
|
3
|
|
|
|
|
|
2.6. Проверить положение ручки «Регулятор нагрузки». Она должна быть повернута в крайнее левое нулевое положение.
2.7. Включить кнопку нагрузки агрегата №1. Загорается лампочка.
2.8. Плавным поворотом ручки «Регулировка нагрузки» вправо устанавливаем нагрузку на валу асинхронного двигателя, равную 0,6 Н м.
Показания приборов записать в табл.1 во второй строке.
2.9. Увеличить нагрузку на валу до 1,2 Н м, записать показания приборов в табл. 1 в третьей строке. Далее, каждый раз увеличивая нагрузку на 0,6 Н м, снимать показания приборов и записывать в табл.1. В шестой (последней) строке записать данные для наибольшего момента сопротивления, равного 3 Н м.
При этом снимается устойчивая часть механической характеристики. Для построения полной механической характеристики n2 = f (M) двигателя используется его паспортные данные.
2.10. Плавно вывести ручку «Регулировка нагрузки» в крайнее левое положение.
2.11. Выключить нагрузку нажатием крайней кнопки «Регулировка нагрузки». Погаснет лампочка.
2.12. Отключить двигатель от сети нажатием красной кнопки «Выкл». Ротор двигателя остановится.
2.13. выключить автоматический выключатель под крышкой стола. Лампочка «Сеть» погаснет.
3. Обработка результатов и их анализ
По измеренным и вычисленным величинам в единой системе координат построить рабочие характеристики: M = f (P2); I1 = f (P2); =f (P2); cos= f (P2); P1 = f (P2), а в другой координатной системе - механическую характеристику асинхронного двигателя:
n2 = f (M) и M = f (s),
где s – скольжение.
Чтобы построить механические характеристики полностью, необходимо определить частоту вращения идеального холостого хода:
n1 = 60 f / p,
где р - число пар полюсов двигателя, f = 50 Гц - частота тока сети;
Максимальный момент двигателя
Mm =2,2 Mн ,
где Mн - номинальный момент.
Mн =9,55 Рн / nн ,
где номинальная мощность в Вт.
Пусковой момент Mп = 2Mн. Критическое скольжение
sкр = sн (+),
где =Mm / Mн = 2,2 - перегрузочная способность двигателя.
sн = n1-nн / n1.
Коэффициент полезного действия равен отношению мощности на валу двигателя P2 и мощности, потребляемой из сети статорными обмотками P1 :
= (P2 / P1) 100 %; P2 =M n2 / 9550 (кВт),
где M - вращающий момент двигателя (Н м).
Коэффициент мощности двигателя равен отношению потребляемой мощности P1 к полной мощности S1:
cos= P1 / S1 ,
где S1 = U1 I1 . Здесь U1 - линейное напряжение на статорных обмотках, В; I1 – линейный ток статорных обмоток, А.
4. Материал для самоподготовки
4.1.Устройство асинхронной машины
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными. Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики. Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания.
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 4.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия. Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, концы – с4, с5, с6.
Начала и концы фаз выведены на клеммник (рис. 4.2 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 4.2 б) или треугольник (рис. 4.2 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/. Данный двигатель можно включать в сеть с Uл = 660В по схеме звезда или в сеть с Uл =380В – по схеме треугольник. Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора (рис. 4.3 б) набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
Короткозамкнутая обмотка (рис. 4.3) ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её “беличьей клеткой” (рис. 4.3 а). Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
М.О. Доливо-Добровольс кий первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. М.О. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором. На рис. 4.4 приведен вид асинхронной машины с фазным ротором в разрезе: 1 – станина, 2 – обмотка статора, 3 – ротор, 4 – контактные кольца, 5 – щетки.
У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины.
На рис. 4.5 приведен вид асинхронной машины с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал. На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины: Рн – номинальная полезная мощность (на валу); Uн и Iн – номинальные значения линейного напряжения и тока для указанной схемы соединения (например, 380/220, Y/, IнY/Iн); nн – номинальная частота вращения в об/мин.
Тип машины задаётся в виде 4AH315S8 - это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения; 315 – высота оси вращения в мм; S – установочные размеры (они задаются в справочнике); 8 – число полюсов машины.
4.2. Получение вращающегося магнитного поля
Условия получения:
- наличие не менее двух обмоток;
- токи в обмотках должны отличаться по фазе;
- оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д. Трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции:
.
Частота вращения магнитного поля n0 зависит от частоты сети f и числа пар полюсов магнитного поля р:
.
Частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки. При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля 0, которая определяется соотношением:
.
4.3. Электромагнитный момент асинхронной машины
Электромагнитный момент возникает при наличии магнитного поля, создаваемого обмоткой статора, и тока в обмотке ротора. Можно показать, что электромагнитный момент определяется соотношением:
.
Здесь С - конструктивный коэффициент равный:
,
где – скорость вращения магнитного поля; – сдвиг по фазе между ЭДС и током ротора;– активная составляющая тока ротора.
Таким образом, величина электромагнитного момента зависит от результирующего магнитного поля и активной составляющей тока ротора. На рис. 4.6 приведено пояснение влияния на величину электромагнитного момента: а) , (); б) , ().
Как следует из рис.4.6а, если , в создании электромагнитного момента участвуют все проводники обмотки ротора, т.е. момент имеет наибольшее значение. Если 2=90° (рис. 4.6 б), результирующая электромагнитная сила и момент равны нулю. В режиме двигателя при изменении нагрузки на валу изменяется частота вращения ротора, что приводит к изменению скольжения, частоты тока ротора, индуктивного сопротивления ротора и cos2. В результате изменяется вращающий момент. На рис. 4.7 приведено пояснение влияния индуктивного сопротивления ротора на угол 2: а) при S=1 (пуск в ход); при S1 (после разгона). Наибольшие значения ЭДС и частота тока ротора имеют в момент пуска в ход, когда скольжение S=1. При этом f2=f1, X2>>R2, угол 2 близок к 90° (рис. 4.7 а).
За счет малого cos2 в момент пуска в ход асинхронные двигатели имеют ограниченный пусковой момент. Кратность пускового момента (по сравнению с номинальным) у них составляет:
.
Причем, большие цифры относятся к двигателям специальной конструкции с улучшенными пусковыми свойствами. По мере разгона ротора двигателя частота тока ротора падает, уменьшается индуктивное сопротивление ротора Х2S и угол 2 уменьшается (рис. 3.7 б). Это приводит к увеличению вращающего момента и дальнейшему разгону двигателя. Подставим в выражение для электромагнитного момента соотношения для I2, cos2 и Ф, полученные ранее:
; ; ,
тогда:
.
Используя соотношение:
,
где ктр – коэффициент трансформации асинхронной машины.
Выразим Е2=E1/ктр, а Е1 приравняем к напряжению U1, подведенному к обмотке статора (Е1U1). В результате получим другое выражение для электромагнитного момента, которое удобно использовать при анализе работы машины, при построении ее характеристик:
, (*)
Из полученного выражения для электромагнитного момента следует, что он сильно зависит от подведенного напряжения . При снижении, например, напряжения на 10%, электромагнитный момент снизится на 19% . Это является одним из недостатков асинхронных двигателей, так как приводит на производстве к снижению производительности труда и увеличению брака.
4.4. Зависимость электромагнитного момента от скольжения
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от + до - (рис. 4.8). Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Мпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя:
.
Из анализа формулы (*) на максимум можно получить соотношения для Мкр и Sкр:
;
.
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя. Из выражения (*), разделив М на Мкр, можно получить формулу, известную под названием «формула Клосса», удобную для построения M = f(S).
.
Если в эту формулу подставить вместо М и S номинальные значения момента и скольжения (Мн и Sн), то можно получить соотношение для расчета критического скольжения:
.
Участок характеристики (рис. 4.8), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Мн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится. Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
4.5. Механическая характеристика асинхронного двигателя
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f(M). Эту характеристику (рис. 4.9) можно получить, используя зависимость M = f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
Так как S = (n0 - n) / n0, отсюда n = n0(1 - S). Напомним, что n0 = (60f)/p – частота вращения магнитного поля. Участок 1-3 соответствует устойчивой работе, участок 3-4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Мн и nн. Точка 3 соответствует критическому моменту Мкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Мпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1:
,
где: р – число пар полюсов машины; f – частота сети.
Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
,
где Рн – номинальная мощность (мощность на валу).
Точка 3 с координатами Мкр nкр. Критический момент рассчитывается по формуле Мкр=Мн. Перегрузочная способность задается в паспорте двигателя: ; ; – номинальное скольжение.
Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле:
,
где пуск – кратность пускового момента задается в паспорте.
Асинхронные двигатели имеют жесткую механическую характеристику, т.к. частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей. Построенная по паспортным данным двигателя механическая характеристика называется естественной. Если изменять величину подведенного напряжения, активное сопротивление ротора или другие параметры, то можно получить механические характеристики, отличные от естественной, которые называют искусственными.
На рис. 4.10 приведены механические характеристики двигателя при разной величине подведенного напряжения. Как следует из рис. 4.10 при понижении подведенного напряжения частота вращения магнитного поля n0 остается неизменной, а уменьшается критический Мкр и пусковой Мпуск моменты, т.е. снижается перегрузочная способность и ухудшаются пусковые свойства двигателя. При понижении подведенного напряжения механическая характеристика становится мягче.
На рис. 4.11 приведены механические характеристики двигателя при разной величине активного сопротивления ротора. Как следует из рис. 4.11 при увеличении активного сопротивления обмотки ротора за счет введения реостата Rдоб в цепь фазного ротора сохраняется неизменным Мкр, т.е. сохраняется перегрузочная способность двигателя, но происходит увеличение пускового момента. Частота вращения в режиме идеального холостого хода остается неизменной, равной n0. С увеличением активного сопротивления обмотки ротора механические характеристики становятся мягче, т.е. ухудшается устойчивость работы двигателя.
4.6. Режимы работы асинхронной машины
4.6.1 Режим двигателя. Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую. Пусть обмотка статора создаёт магнитное поле, вращающееся с частотой n0 в указанном направлении (рис. 4.12). Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки и показано на рисунке (силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т.е. ротора, относительно магнитного поля). В обмотке ротора появится ток, направление которого примем совпадающим с направлением ЭДС. В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки (силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора). В данном режиме электромагнитная сила создаст вращающий момент, под действием которого ротор начнёт вращаться с частотой n. Направление вращения ротора совпадает с направлением вращения магнитного поля. Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения магнитного поля. Для реверса двигателя нужно изменить порядок чередования фаз подведённого напряжения, т.е. переключить две фазы.
Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n=n0). При этом в обмотке ротора ЭДС E2 будет равна нулю. Ток в обмотке ротора I2=0, электромагнитный момент M тоже станет равным нулю. За счёт этого ротор станет вращаться медленнее, в обмотке ротора появится ЭДС, ток. Возникнет электромагнитный момент. Таким образом, в режиме двигателя ротор будет вращаться несинхронно с магнитным полем. Частота вращения ротора будет изменяться при изменении нагрузки на валу. Отсюда появилось название двигателя – асинхронный (несинхронный). При увеличении нагрузки на валу двигатель должен развивать больший вращающий момент, а это происходит при снижении частоты вращения ротора. В отличие от частоты вращения ротора частота вращения магнитного поля не зависит от нагрузки. Для сравнения частоты вращения магнитного поля n0 и ротора n ввели коэффициент, который назвали скольжением и обозначили буквой S. Скольжение может измеряться в относительных единицах и в процентах:
или .
При пуске в ход асинхронного двигателя n=0, S=1. В режиме идеального холостого хода n=n0, S=0. Таким образом, в режиме двигателя скольжение изменяется в пределах:
0 < S 1.
При работе асинхронных двигателей в номинальном режиме:
Sn = (2-5) %.
В режиме реального холостого хода асинхронных двигателей:
Sхх = (0,2 - 0,7) %.
4.6.2. Режим генератора. Этот режим служит для преобразования механической энергии в электрическую, т.е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n>n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n>n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 4.13). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т.е. направление передачи электрической энергии). При n > n0, S = 0. При n +, S -. Таким образом, в режиме генератора скольжение изменяется в пределах 0 > S > -.
4.6.3. Режим электромагнитного тормоза. Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Согласно рис.4.14 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс. В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины. При n = n0, S = 1. При n -, S +. Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах: 0 < S < .
4.7. Процессы в асинхронной машине
4.7.1. Процессы в цепи статора. ЭДС статора. Магнитное поле, создаваемое обмоткой статора, вращается относительно неподвижного статора с частотой n0=(60f)/p и будет наводить в обмотке статора ЭДС. Действующее значение ЭДС, наводимой этим полем в одной фазе обмотки статора определяется выражением:
,
где: k1=0.920.98 – обмоточный коэффициент; f1=f – частота сети; w1 – число витков одной фазы обмотки статора; Ф – результирующее магнитное поле в машине.
Уравнение электрического равновесия фазы обмотки статора. Это уравнение составлено по аналогии с катушкой с сердечником, работающей на переменном токе:
,
где и – напряжение сети и напряжение, подведённое к обмотке статора; R1 – активное сопротивление обмотки статора, связанное с потерями на нагрев обмотки; x1 – индуктивное сопротивление обмотки статора, связанное с потоком рассеяния; z1 – полное сопротивление обмотки статора; 1 – ток в обмотке статора.
При анализе работы асинхронных машин часто принимают I1 z1 = 0. Тогда можно записать:
.
Из этого выражения следует, что магнитный поток Ф в асинхронной машине не зависит от её режима работы, а при заданной частоте сети зависит только от действующего значения приложенного напряжения U1. Аналогичное соотношение имеет место и в другой машине переменного тока – в трансформаторе.
4.7.2. Процессы в цепи ротора. Частота ЭДС и тока ротора. При неподвижном роторе частота ЭДС f2 равна частоте сети f:
.
При вращающемся роторе частота ЭДС ротора зависит от частоты вращения магнитного поля относительно вращающегося ротора, которая определяется соотношением:
n' = n0 - n.
Тогда частота ЭДС вращающегося ротора:
.
Частота ЭДС ротора изменяется пропорционально скольжению и в режиме двигателя имеет наибольшее значение в момент пуска в ход. Пусть при f=50Гц, номинальное скольжение Sн=2%. Тогда при номинальной частоте вращения ротора f2=fSн=1Гц. Таким образом, в обмотке ротора асинхронной машины частота наводимой ЭДС зависит от частоты вращения ротора. ЭДС ротора. При неподвижном роторе f2=f и действующее значение ЭДС определяется по аналогии с E1:
,
где: w2 и k2 – соответственно число витков и обмоточный коэффициент обмотки ротора.
Если ротор вращается, то f2=fSн и ЭДС вращающегося ротора определяется соотношением:
.
ЭДС, наводимая в обмотке ротора, изменяется пропорционально скольжению и в режиме двигателя имеет наибольшее значение в момент пуска в ход. Отношение ЭДС статора к ЭДС неподвижного ротора называется коэффициентом трансформации асинхронной машины:
.
Ток ротора. Запишем уравнение равновесия для одной фазы короткозамкнутого ротора. При неподвижном роторе:
,
где: x2=2fL2 – индуктивное сопротивление обмотки неподвижного ротора, связанное с потоком рассеяния; R2 – активное сопротивление обмотки ротора, связанное с потерями на нагрев обмотки.
При вращающемся роторе:
,
где: – индуктивное сопротивление обмотки вращающегося ротора.
Для тока ротора в общем случае можно получить такое соотношение:
.
Отсюда следует, что ток ротора зависит от скольжения и возрастает при его увеличении, но медленнее, чем ЭДС.
Поле ротора. Обмотка ротора, как и обмотка статора, является многофазной и при появлении в ней тока создаёт своё вращающееся магнитное поле. Обозначим через n2 частоту вращения магнитного поля ротора относительно ротора:
,
где p – число пар полюсов обмотки ротора, оно всегда равно числу пар полюсов обмотки статора.
Относительно статора магнитное поле ротора вращается с частотой:
.
Из полученного соотношения следует, что магнитное поле ротора относительно статора вращается с той же частотой, что и магнитное поле статора. Таким образом, магнитные поля ротора и статора относительно друг друга неподвижны. Поэтому при анализе работы асинхронной машины можно применить те же соотношения, что и трансформаторе.
4.7.3. Ток статора. Так как результирующее магнитное поле асинхронной машины не зависит от её режима работы, можно составить для одной фазы уравнение магнитодвижущих сил, приравняв магнитодвижущую силу в режиме холостого хода к сумме магнитодвижущих сил в режиме нагрузки:
,
отсюда:
,
где I0 – ток в обмотке статора в режиме идеального холостого хода, – составляющая тока статора, которая компенсирует действие магнитодвижущей силы обмотки ротора. Полученное выражение для тока статора отражает свойство саморегулирования асинхронной машины. Чем больше ток ротора, тем больше ток статора. В режиме холостого хода ток статора минимальный. В режиме нагрузки ток статора возрастает. Ток реального холостого хода асинхронной машины и значительно больше по сравнению с номинальным током, чем у трансформатора. Это объясняется тем, что величина тока I0 зависит от магнитного сопротивления среды, в которой создаётся магнитное поле. У асинхронной машины, в отличие от трансформатора, есть воздушный зазор, который создаст большое сопротивление магнитному полю.
4.8. Совместная работа асинхронного двигателя с нагрузкой на валу
На рис. 4.15 рассматривается совместная работа асинхронного двигателя с нагрузкой на валу. Нагрузочный механизм (рис. 4.15, а) соединяется с валом двигателя и при вращении создает момент сопротивления (момент нагрузки).
При изменении нагрузки на валу автоматически изменяется частота вращения ротора, токи в обмотках ротора и статора и потребляемый из сети ток. Пусть двигатель работал с нагрузкой Мнагр 1 в точке 1 (рис. 4.15). Если нагрузка на валу увеличится до значения Мнагр 2, рабочая точка переместится в точку 2. При этом частота вращения ротора снизится (n2<n1), а возрастет вращающий момент (М2>М1). Снижение частоты вращения ротора приводит к увеличению скольжения, увеличению токов в обмотках ротора и статора, т.е. к увеличению потребляемого из сети тока.
4.9. Пуск асинхронного двигателя
4.9.1. Прямое включение в сеть (прямой пуск). В момент пуска в ход n=0, т.е. скольжение S=1. Т.к. токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 8 раз больше его номинального тока:
.
Как рассматривалось ранее, из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент:
.
Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента.
Прямое включение в сеть- это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, если мощность двигателя не превышает 5% от мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25% от мощности трансформатора.
4.9.2. Пуск при пониженном напряжении. Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети.
Понижение напряжения производят с целью уменьшения пускового тока, но одновременно, происходит уменьшение пускового момента. Если напряжение при пуске понизить в раз, пусковой момент понизится в 3 раза. Поэтому этот способ пуска можно применять только при отсутствии нагрузки на валу, т.е. в режиме холостого хода. Если, согласно паспортным данным, двигатель должен включаться в сеть по схеме треугольник, то для снижения пускового тока на время пуска в ход обмотку статора включают по схеме звезда. Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
4.9.3. Реостатный пуск. Этот способ применяют при тяжелых условия пуска, т.е. при большой нагрузке на валу. Для реостатного пуска используют асинхронные двигатели с фазным ротором, в цепь ротора включается пусковой реостат. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко.
На рис. 4.16. приведена схема реостатного пуска (рис. 4.16, а) и механические характеристики (рис 4.16,б) при этом пуске. В момент пуска в ход (рис. 4.16, а) в цепь ротора введен полностью пусковой реостат (Rпуск3=Rпуск1+Rпуск2), для чего контакты реле к1 и к2 разомкнуты. При этом двигатель будет запускаться по характеристике 3 (рис. 4.16) под действием пускового момента Мпуск. При заданной нагрузке на валу и введенном реостате Rпуск3 разгон закончится в точке А. Для дальнейшего разгона двигателя нужно замкнуть контакты к1, при этом сопротивление пускового реостата снизится до Rпуск2 и разгон будет продолжаться по характеристике 2 до точки В. При замыкании контактов к2, пусковой реостат будет полностью выведен (Rпуск=0) и окончательный разгон двигателя будет продолжаться по его естественной механической характеристике 1 и закончится в точке С. Критическое скольжение равно для естественной характеристики:
,
для искусственной характеристики:
.
Пусковой момент для искусственной характеристики можно рассчитать по формуле Клосса:
.
Задаваясь необходимой величиной пускового момента, можно вычислить Sкр3 и величину пускового сопротивления:
.
4.9.4. Использование двигателей с улучшенными пусковыми свойствами. Стремление совместить достоинства асинхронных двигателей с короткозамкнутым ротором (высокая надежность) и фазным ротором (большой пусковой момент) привело к созданию этих двигателей. Они имеют короткозамкнутую обмотку ротора специальной конструкции. Различают двигатели с обмоткой ротора в виде двойной «беличьей клетки» (рис. 4.17,а) и с глубоким пазом (рис. 4.17, б).
У двигателя с двойной «беличьей клеткой» на роторе закладывается две короткозамкнутые обмотки. Обмотка выполняет роль пусковой, а обмотка является рабочей. Для получения повышенного пускового момента пусковая обмотка должна обладать большим активным сопротивлением, чем рабочая обмотка. Поэтому обмотка выполняется из материала с повышенным удельным сопротивлением (латунь), чем обмотка (медь). Сечение проводников, образующих пусковую обмотку, меньше, чем у рабочей обмотки. За счет этого повышается активное сопротивление пусковой обмотки.
Рабочая обмотка, расположенная глубже, охватывается большим магнитным потоком, чем пусковая. Поэтому индуктивное сопротивление рабочей обмотки значительно больше, чем пусковой. За счет этого в момент пуска в ход, когда частота тока ротора имеет наибольшее значение, ток в рабочей обмотке, как следует из закона Ома, будет небольшим, и в создании пускового момента будет участвовать в основном пусковая обмотка, имеющая большое активное сопротивление. По мере разгона двигателя частота тока ротора падает, уменьшается и индуктивное сопротивление обмоток ротора, это приводит к увеличению тока в рабочей обмотке, за счет этого в создании вращающего момента будет участвовать, в основном, рабочая обмотка. Т.к. она обладает малым активным сопротивлением, естественная механическая характеристика двигателя будет жесткой.
Аналогичная картина наблюдается у двигателя с глубоким пазом. Глубокий стержень обмотки можно представить в виде нескольких проводников, расположенных по высоте паза. За счет высокой частоты тока в обмотке ротора в момент пуска в ход происходит «вытеснение тока к поверхности проводника». За счет этого в создании пускового момента участвует только верхний слой проводников обмотки ротора. Сечение верхнего слоя значительно меньше сечения всего проводника. Поэтому при пуске в ход обмотка ротора обладает повышенным активным сопротивлением, двигатель развивает повышенный пусковой момент. По мере разгона двигателя плотность тока по сечению проводников обмотки ротора выравнивается, сопротивление обмотки ротора снижается.
В целом эти двигатели имеют жесткие механические характеристики, повышенный пусковой момент и меньшую кратность пускового тока, чем двигатели с короткозамкнутым ротором обычной конструкцией.
4.10. Регулирование скорости асинхронного двигателя
4.10.1. Регулирование скорости изменением скольжения. Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
.
В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 4.18). На рис. 4.18 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3>Rр2>0, Rр1=0.
Как следует из рис. 4.18 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
- из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный;
- механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя;
- невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
4.10.2. Изменение числа пар полюсов. Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели.
На рис. 4.19 показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток.
У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов. У четырехскоростного двигателя на статоре должно размещаться две независимые обмотки с разным числом пар полюсов. Каждая из обмоток позволяет в два раза изменять число пар полюсов. Например, у двигателя, работающего от сети c частотой f=50 Гц, со следующими частотами вращения 3000/1500/1000/500 [об/мин] с помощью одной из обмоток статора можно получить частоту вращения 3000 об/мин и 1500 об/мин (при этом р=1 и р=2). С помощью другой из обмоток можно получить частоту вращения 1000 об/мин и 500 об/мин (при этом р=3 и р=6). При переключении числа пар полюсов изменяется и магнитный поток в зазоре, что приводит к изменению критического момента Мкр. Если при изменении числа пар полюсов одновременно изменять и подведенное напряжение, то критический момент может остаться неизменным. Поэтому при этом способе регулирования могут быть получены два вида механических характеристик.Достоинства этого способа регулирования: сохранение жесткости механических характеристик, высокий К.П.Д. Недостатки: ступенчатое регулирование, большие габариты и большая стоимость двигателя.
4.10.3. Изменение частоты источника питания. В качестве таких источников питания в настоящее время начали находить применение преобразователи частоты (ПЧ), выполняемые на мощных полупроводниковых приборах – тиристорах. Из уравнения трансформаторной ЭДС U1 = 4,44 w1 k1 f Ф следует, что для сохранения неизменным магнитного потока, т.е. для сохранения перегрузочной способности двигателя, необходимо вместе с частотой изменять и действующее значение подведенного напряжения. При выполнении соотношения , критический момент не изменяется и получается семейство механических характеристик, представленное на рис. 4.20.
Достоинства этого способа: плавное регулирование, возможность повышать и понижать частоту вращения, сохранение жесткости механических характеристик, экономичность. Основной недостаток – требуется преобразователь частоты, т.е. дополнительные капитальные вложения.
4.11.Тормозные режимы асинхронных машин
4.11.1. Генераторное торможение. При работе многих производственных механизмов возникает необходимость в быстрой остановке (торможении) двигателя. Для этой цели широко используются механические тормоза, но асинхронная машина может сама выполнять функции тормозного устройства, работая в одном из тормозных режимов. При этом механические тормоза используются как запасные или аварийные, а также для удержания механизма в неподвижном состоянии.
В режиме генераторного торможения машина переходит в режим генератора, если n > n0, т.е. если ротор вращается быстрее магнитного поля. Этот режим может наступить при регулировании скорости вращения увеличением числа пар полюсов или уменьшением частоты источника питания, а также в подъемно-транспортных машинах при опускании груза, когда под действием силы тяжести груза ротор начинает вращаться быстрее магнитного поля.
В режиме генератора изменяется направление электромагнитного момента, т.е. он становится тормозным, под действием чего происходит быстрое снижение скорости вращения. Одновременно изменяется фаза тока в обмотке статора, что приводит к изменению направления передачи электрической энергии. В режиме генератора происходит возврат энергии в сеть. На рис. 4.21 представлены механические характеристики при генераторном торможении за счет опускания груза (а) и понижении частоты источника питания (б). Пусть двигатель с заданной нагрузкой на валу работал в точке А (рис. 4.21). Если под действием опускаемого груза ротор начнет вращаться быстрее магнитного поля и рабочая точка попадает в точку В, то nв > n0, машина будет развивать тормозной момент и частота вращения снизится до величины меньшей n0. Одно из достоинств генераторного торможения у асинхронных машин заключается в том, что переход в режим генератора происходит автоматически, как только ротор начинает вращаться быстрее магнитного поля. Это защищает асинхронные двигатели от аварийной ситуации, которая может наступить у двигателей постоянного тока. Асинхронные двигатели не могут пойти в разнос. Максимальная частота вращения ротора ограничивается частотой вращения магнитного поля.
Пусть двигатель работает с заданной нагрузкой на валу в точке А характеристики (рис. 4.22). При снижении частоты источника питания рабочая точка должна перейти в точку C характеристики. Но если nА окажется больше новой пониженной частоты вращения магнитного поля n02, то машина из точки А переходит в точку В, работая на участке В – n02 в режиме генератора. За счет этого происходит быстрое снижение частоты вращения. На участке n02 – С машина работает в режиме двигателя, но происходит дальнейшее уменьшение частоты вращения ротора, пока вращающий момент не станет равным моменту нагрузки (т.С). Новое состояние равновесия с заданной нагрузкой наступает в точке С. Генераторное торможение является самым экономичным режимом, т.к. происходит преобразование механической энергии в электрическую и возврат энергии в сеть. Одним из достоинств этого тормозного режима является его самопроизвольное появление, т.е. не требуется никакая контролирующая аппаратура.
4.11.2. Динамическое торможение. Этот тормозной режим используется для точной остановки мощных двигателей. На время торможения обмотка статора отключается от сети переменного напряжения и подключается и источнику с постоянным напряжением. При этом обмотка статора будет создавать постоянное неподвижное магнитное поле. При вращении ротора относительно этого магнитного поля изменяется направление ЭДС и тока ротора, что приведет к изменению направления электромагнитного момента, т.е. он станет тормозным. Под действием этого момента происходит торможение. Изменяя величину подведенного к обмотке статора напряжения, можно регулировать время торможения. Основным достоинством этого тормозного режима является точная остановка. Постоянное напряжение можно подводить к обмотке статора только на время торможения. После остановки двигатель нужно отключить от сети постоянного тока.
На рис. 4.22 показаны схемы включения асинхронного двигателя и механические характеристики при динамическом торможении. Пусть двигатель работает с нагрузкой в точке А. При подаче на обмотку статора постоянного напряжения рабочая точка перейдет из точки А в точку В тормозной характеристики 2. Под действием тормозного электромагнитного момента будет происходить снижение частоты вращения до полной остановки (точка 0). Основные недостатки динамического торможения: необходим источник постоянного тока и неэкономичность.
4.11.3. Торможение противовключением. Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя. На рис. 4.23 представлены механические характеристики асинхронного двигателя при торможении противовключением для прямого (1) и обратного (2) порядка чередования фаз. Пусть двигатель с нагрузкой на валу работал в точке А. Для торможения двигателя нужно изменить порядок чередования фаз, т.е. переключить две фазы. При этом рабочая точка перейдет в точку В. На участке ВС машина работает в режиме электромагнитного тормоза, развивая тормозной момент, под действием которого происходит быстрое снижение скорости до нуля. В точке С двигатель нужно отключить от сети, иначе произойдет реверс.
Достоинством этого тормозного режима является быстрое торможение, т.к. тормозной момент действует на всем тормозном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
4.12. Коэффициент мощности асинхронного двигателя
Коэффициент мощности определяется соотношением:
,
где: Р1, Q1, S1 – активная, реактивная и полная мощность двигателя.
,
где: Р2 – мощность на валу (полезная мощность); P – мощность потерь.
,
где: Pэл – электрические потери (потери на нагрев обмоток); Pст – потери в стали (потери на нагрев сердечника); Pмех – механические потери.
Электрические потери Pэл зависят от токов в обмотках и возрастают при увеличении нагрузки на валу. Потери в стали не зависят от нагрузки на валу, а зависят от подведенного к обмотке статора напряжения.
Механические потери относятся к постоянным потерям.
В номинальном режиме cosн=0,75-0,95, cosхх= =0,08-0,15.
Снижение cosхх объясняется тем, что активная мощность мала , а реактивная мощность Q1 остается такой же, как и в номинальном режиме.
На рис. 4.24 показана зависимость коэффициента мощности асинхронного двигателя от нагрузки на валу. При большой недогрузке асинхронного двигателя он имеет низкий коэффициент мощности, что экономически невыгодно. Для повышения cos при малой нагрузке рекомендуется понижать подведенное к двигателю напряжение. При этом уменьшается реактивная мощность, а коэффициент мощности повышается.
5. Контрольные вопросы
5.1. Устройство асинхронной машины.
5.2. Получение вращающегося поля в асинхронной машине.
5.3. Электромагнитный момент асинхронной машины.
5.4. Зависимость электромагнитного момента от скольжения.
5.5. Механическая характеристика асинхронного двигателя.
5.6. Режимы работы асинхронной машины.
5.7. Процессы в асинхронной машине.
5.8. Совместная работа асинхронного двигателя с нагрузкой на валу.
5.9. Пуск асинхронного двигателя.
5.10. Регулирование скорости асинхронного двигателя.
5.11. Тормозные режимы асинхронных машин.
5.12. Коэффициент мощности асинхронного двигателя.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Кацман, М.М. Электрические машины [Текст]/ М.М. Кацман. – М.: Академия, 2003. – 496 с.:ил.
2. Пиотровский, Л.М. Электрические машины [Текст]/ Л. М. Пиотровский. – Л.: Энергия, 1972. – 504 с.: ил.
3. Кацман, М.М. Лабораторные работы по электрическим машинам и электроприводу [Текст]/ М.М. Кацман. – М.: Академия, 2003. – 256 с.:ил.
4. Электротехнический справочник. Под общей редакцией П. Г. Грудинского. Изд. 5-е, испр.[Текст] - М.: Энергия, 1975. – 776 с.: ил.
5. Вольдек, А.И. Электрические машины. Учебник для студентов высших учебных заведений [Текст] / А.И. Вольдек. – Л.: Энергия, 1978. – 832с.
6. Кулик, Ю.А. Электрические машины [Текст] / Ю.А. Кулик. – М.: Высшая школа, 1966. – 528с.
Александр Николаевич Шпиганович
Кирилл Дмитриевич Захаров
Исследование асинхронного трёхфазного двигателя
с короткозамкнутым ротором
Методические указания к лабораторной работе №2 по дисциплине
"Электрические машины"
Издаётся в авторской редакции
Подписано в печать Формат 60х84 1/16 Бумага офсетная.
Ризография. Печ. л. 2,3 Тираж 100 экз. Заказ №
Липецкий государственный технический университет
398600 Липецк, ул. Московская, 30
Типография ЛГТУ, 398600 Липецк, ул. Московская, 30
Рис.4.1. Сердечник статора в сборе
Рис.4.2. Схемы соединения обмотки
статора
Рис.4.3. Сердечник ротора
Рис.4.4. Асинхронная машина с фазным ротором
Рис.4.5. Асинхронная машина с
короткозамкнутым ротором
Рис 4.6. Влияние cos2 на величину электромагнитного момента
Рис. 4.7. Пояснение влияния
индуктивного сопротивления ротора на угол 2
Рис. 4.8. Механическая характеристика асинхронного двигателя М=f(S)
Рис.4.9. Механическая характеристика асинхронного двигателя
Рис. 4.10. Механические характеристики двигателя при разной величине
подведенного напряжения
Рис. 4.11. Механические
характеристики двигателя при разной величине активного сопротивления ротора
Рис. 4.12. Магнитное поле обмотка статора
Рис. 4.13. Тормозной момент на валу
Рис. 4.14. Режим электромагнитного тормоза
Рис. 4.15. Совместная работа
асинхронного двигателя с нагрузкой
на валу
Рис. 4.16. Схема реостатного
пуска
Рис. 4.17. Двигатели с различными обмотками ротора
Рис. 4.18. Механические
характеристики асинхронного
двигателя
Рис. 4.23. Механические характеристики асинхронного двигателя при торможении противовключением
EMBED Visio.Drawing.11 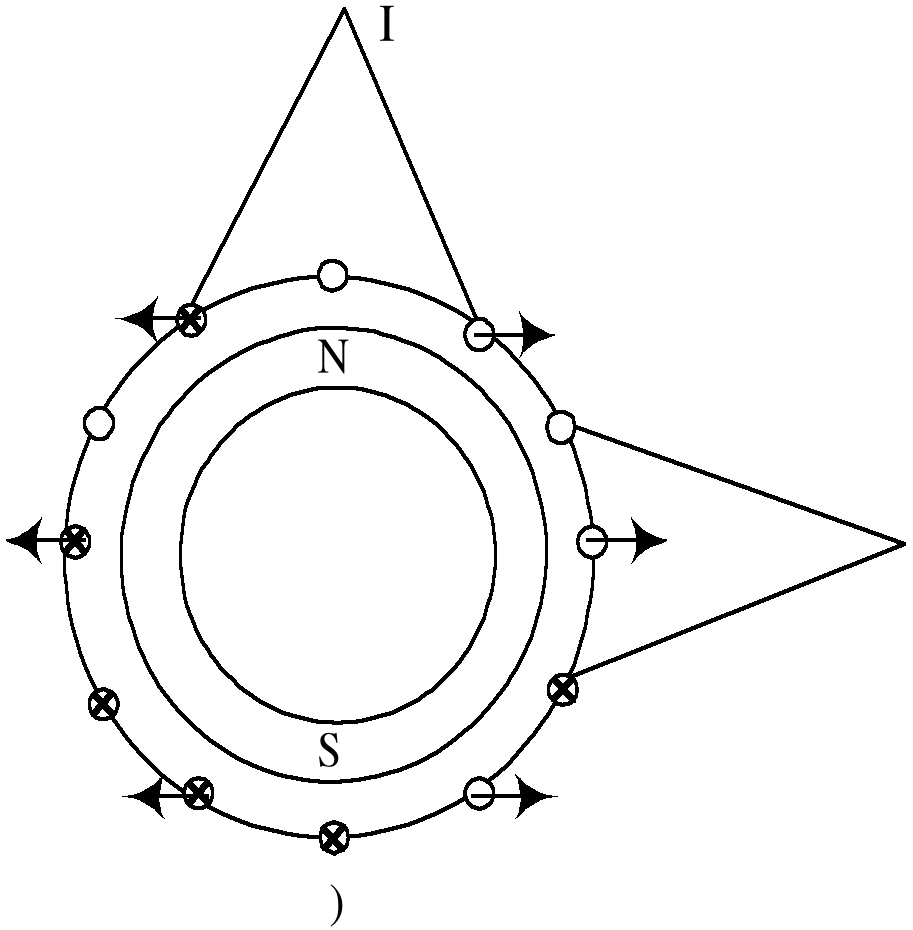
EMBED Visio.Drawing.11 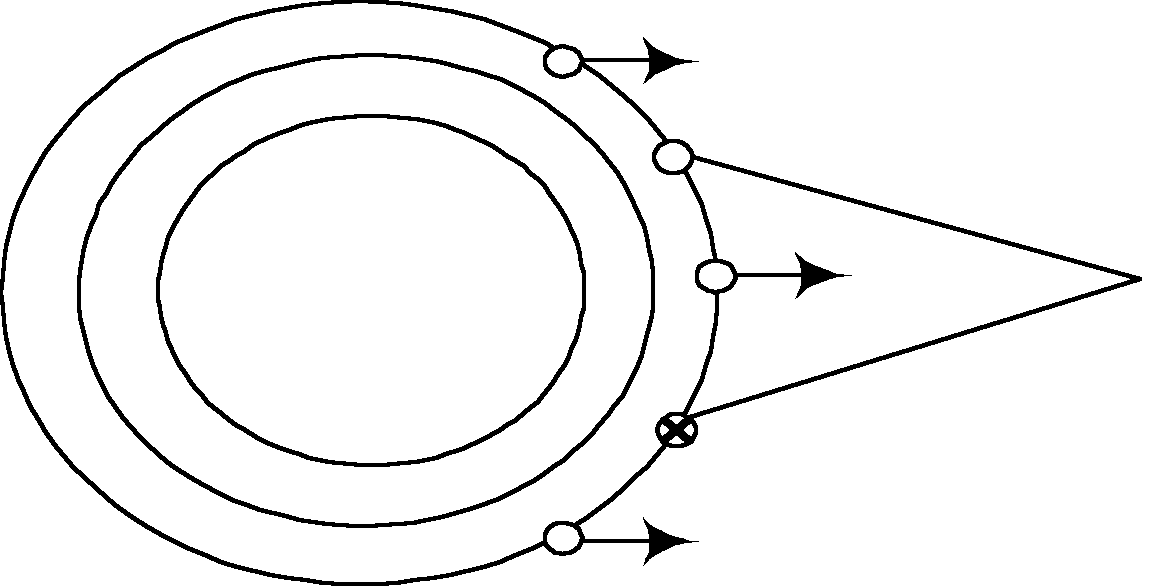
EMBED Visio.Drawing.11 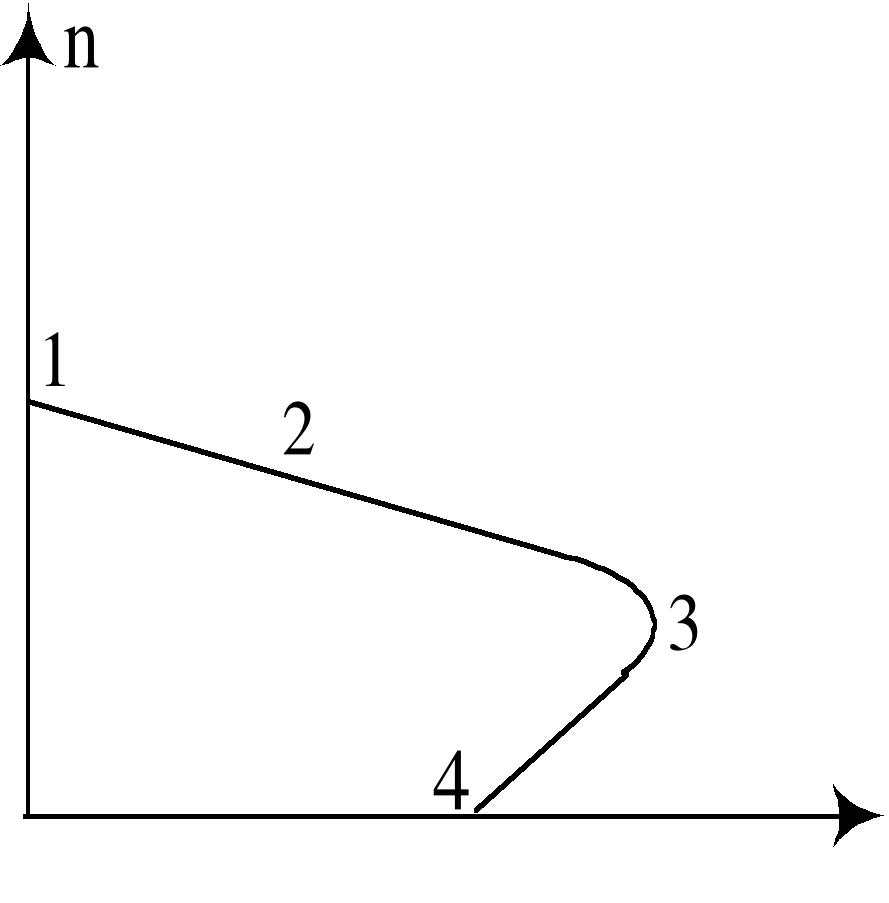
EMBED Visio.Drawing.11 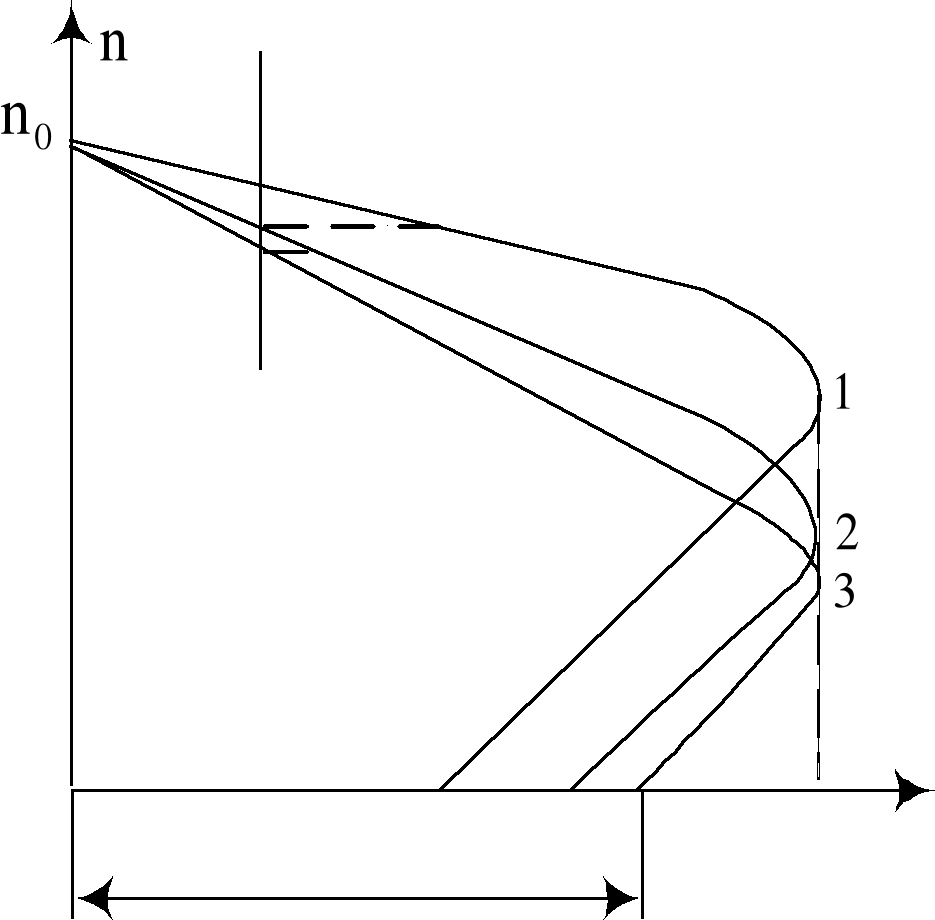
EMBED Visio.Drawing.11 
EMBED Visio.Drawing.11 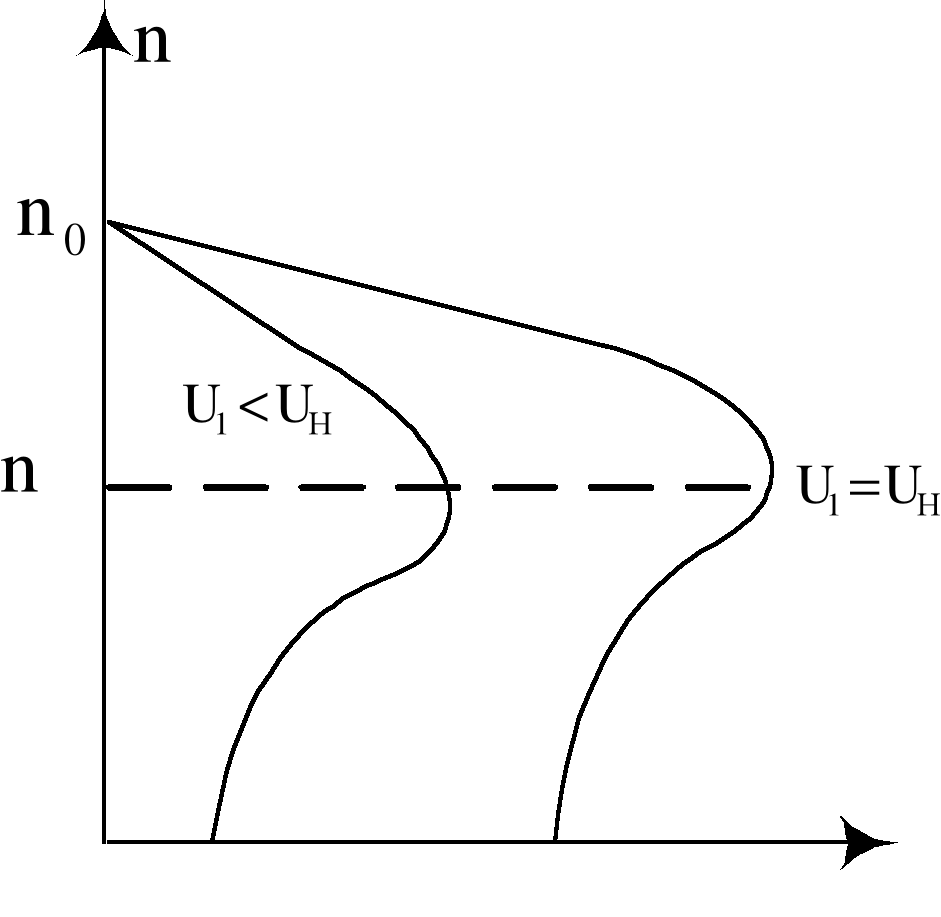
EMBED Visio.Drawing.11 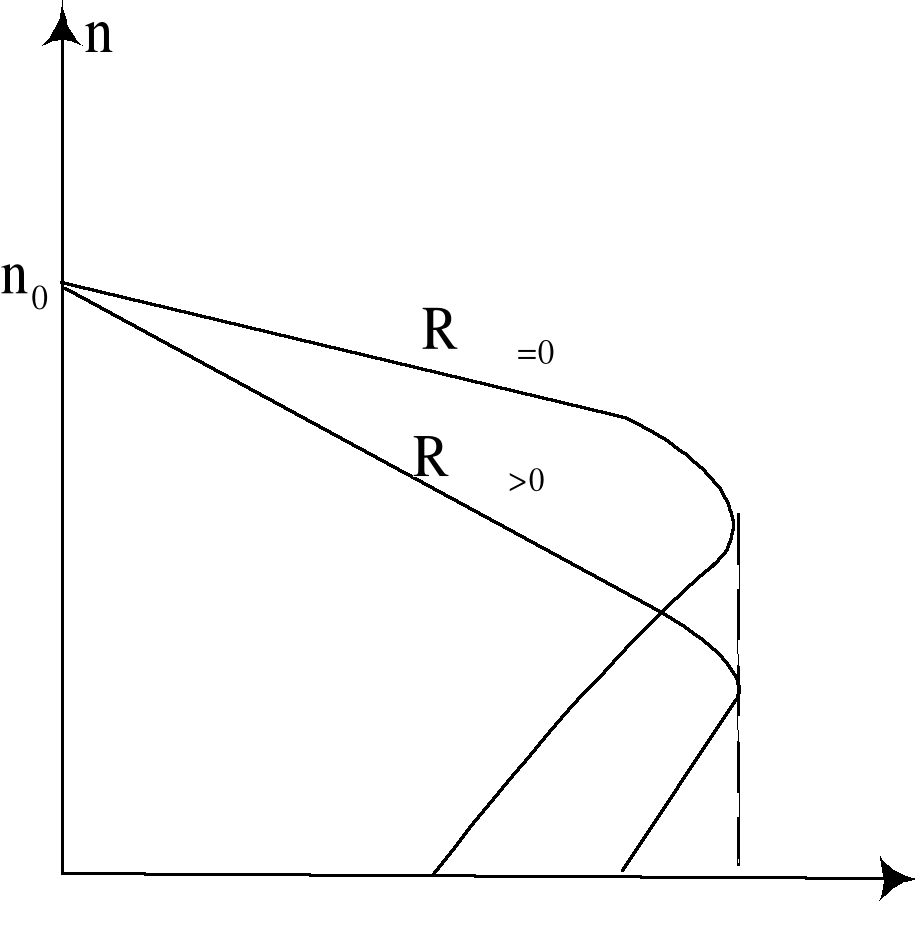
EMBED Visio.Drawing.11 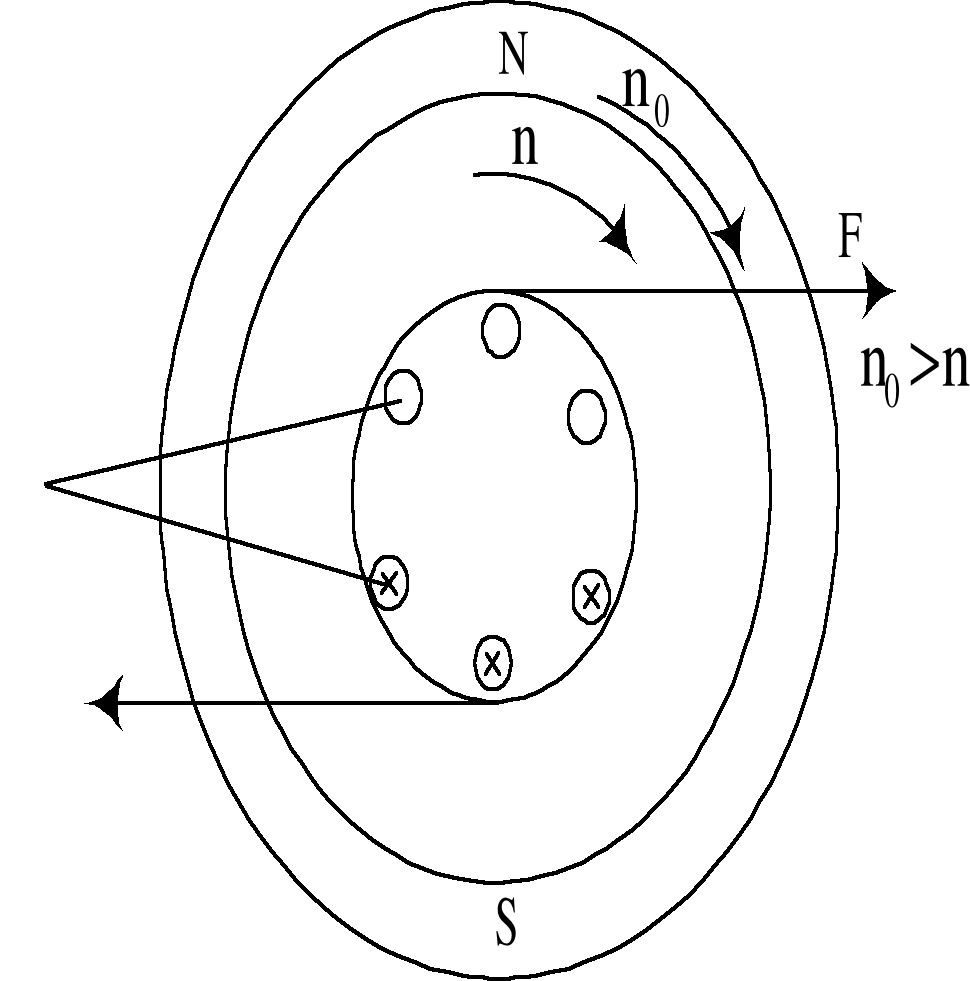
1690
EMBED Visio.Drawing.11 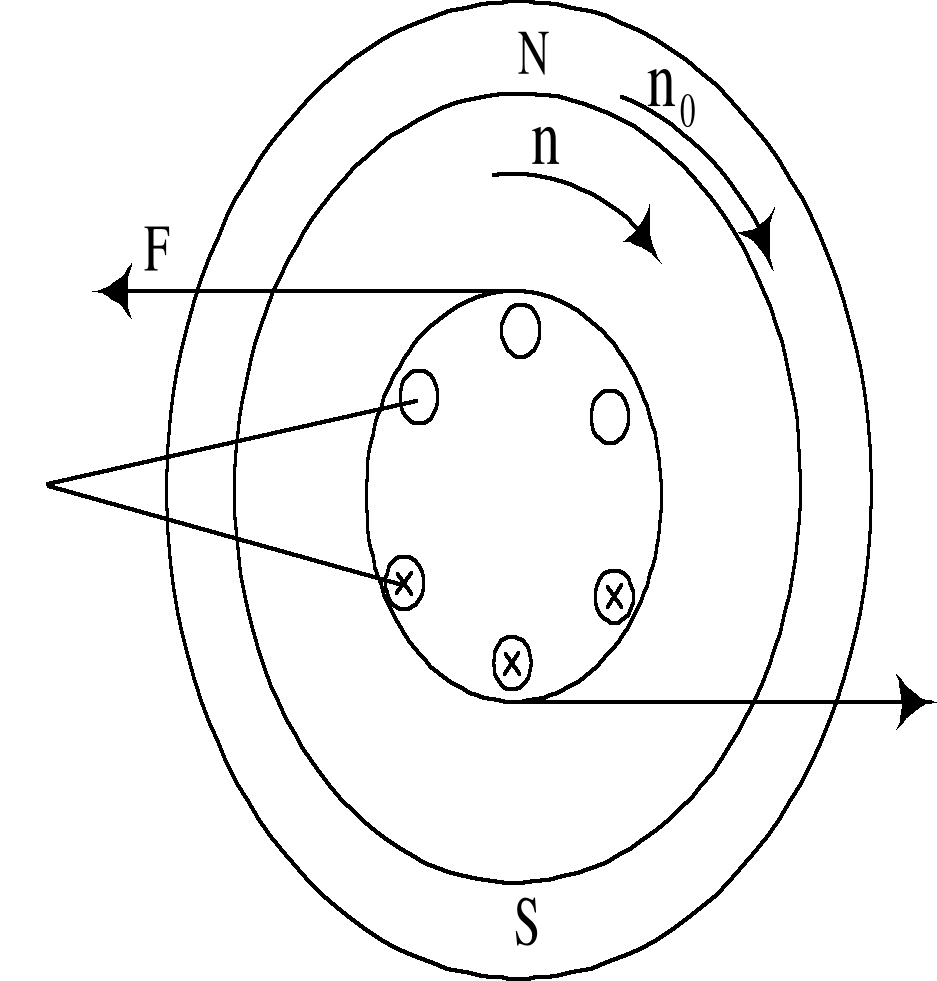
EMBED Visio.Drawing.11 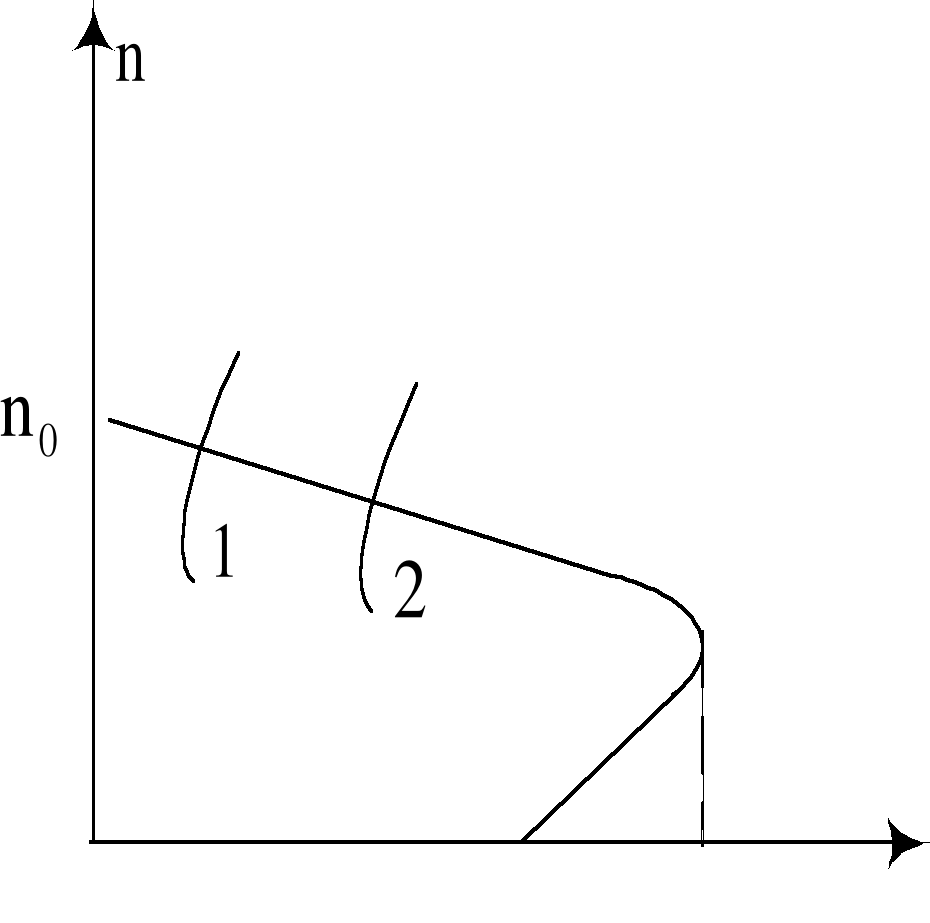
Рис. 4.20. Механические характеристики при изменении числа пар
полюсов
Рис. 4.20. Механические характеристики при частотном регулировании
Рис. 4.21. Механические характеристики при генераторном торможении
Рис. 4.22. Схемы включения асинхронного двигателя и механические характеристики при
динамическом торможении
Рис. 4.24. Зависимость коэффициента мощности асинхронного двигателя от нагрузки на валу
Рис. 4.19. Схема соединения и магнитное поле статора двигателя
Рис.1.1. Схема исследования асинхронного
трехфазного двигателя с короткозамкнутым ротором
Исследование асинхронного трёхфазного двигателя с короткозамкнутым ротором