Исследование генератора постоянного тока
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
"ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ"
Кафедра электрооборудования
А.Н. Шпиганович, К.Д. Захаров
Исследование генератора постоянного тока
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторной работе № 3 по дисциплине
"Электрические машины"
Для студентов специальности 140610
"Электрооборудование и электрохозяйство предприятий,
организаций и учреждений"
Липецк 2007
УДК 621.31 (07)
Ш 835
Шпиганович А.Н. Исследование генератора постоянного тока [Текст]: методические указания к лабораторной работе №3 по дисциплине "Электрические машины"/А.Н. Шпиганович, К.Д. Захаров. – Липецк: ЛГТУ, 2007. – 37 с.
Методические указания предназначены для студентов 2 и 3 курса очной и 4 курса очно–заочной и заочной форм обучения специальности 140610 "Электрооборудование и электрохозяйство предприятий, организаций и учреждений"
Табл. 3. Ил. 37. Библиогр.: 6 назв.
Рецензент Зацепин Е.П. канд. техн. наук, доцент
© А.Н. Шпиганович, К.Д. Захаров, 2007
© ГОУ ВПО "Липецкий государственный
технический университет, 2007
Исследование генератора постоянного тока
Цель работы – изучение характеристик генератора постоянного тока с независимым возбуждением.
1. Оборудование и приборы
Исследуется генератор со следующими параметрами: номинальная мощность Рн = 0,37 кВт; номинальное напряжение Uн = 110 В; номинальное напряжение возбуждения Uв1 =110 В; номинальная частота вращения якоря nн =1500 об/мин , номинальный ток возбуждения 0,5 А.
Генератор установлен внутри стенда и приводится во вращение асинхронным двигателем, который запускается кнопкой «Включение к сети синхронной и асинхронной машин». Обмотка возбуждения подключается к источнику постоянного напряжения кнопкой «Возбуждение синхронной машины и генератора постоянного тока». Изменение напряжения возбуждения осуществляется ручкой «Регулировка», расположенной рядом с кнопкой. Кнопки и ручка находятся на панели «Синхронная машина».
На панель «Машины постоянного тока» выведена ручка реостата регулировки сопротивления цепи возбуждения генератора. Здесь же находится переключатель «Нагрузка генератора».
В правой части горизонтальной панели стенда находится мнемосхема, на которой с помощью вилок-перемычек собирают необходимую схему. Измерительные приборы находятся в верхней части вертикальной панели и снабжены соответствующими надписями.
2. Порядок выполнения работы
2.1. Ознакомиться с оборудование и приборами на стенде, записать их паспортные данные.
2.2. Собрать схему генератора с независимым возбуждением (рис.1.1).
2.3. Перед началом работы необходимо размагнитить магнитную цепь генератора. Для этого следует гнездо (+110 В) соединить с правым гнездом возбуждения генератора, гнездо (-110 В) с левым гнездом обмоток возбуждения. Ручку реостата цепи возбуждения повернуть против часовой стрелки до упора. Включить стенд, запустить приводной двигатель, включить возбуждение. Увеличивая ток возбуждения, добиться снижения напряжения якоря генератора до нуля. Выключить стенд и восстановить схему генератора.
2.4. Снять характеристику холостого хода E = f (Iв) при увеличении тока возбуждения от 0 до максимального значения (0,5 - 0,6 А) и при снижении тока возбуждения от максимального значения до нуля. Для этого переключатель «Нагрузка генератора» установить в положение 1 (нагрузка отключена), включить стенд, запустить приводной двигатель, повернуть ручку «Регулировка» напряжения возбуждения против часовой стрелки до упора и включить возбуждение. Ток возбуждения измерять амперметром PA1, эдс якоря вольтметром PV1. Данные записать в табл.2.1.
Таблица 2.1
|
Ветвь характеристики |
Восходящая |
Нисходящая |
|
E, В |
||
|
Iв , А |
2.5. Снять внешнюю характеристику генератора U = f (Iя) при номинальном токе возбуждения. Для этого включить стенд, запустить приводной двигатель, включить возбуждение и установить номинальный ток возбуждения. По амперметру PA2 и вольтметру PV1 определить ток якоря и напряжение соответственно при различных положениях переключателя «Нагрузка генератора». Данные записать в табл.2.2.
Таблица 2.2
|
U, В |
|
|
Iя, А |
2.6. Снять регулировочную характеристику генератора Iв= f (Iя) при напряжении U =70-90 В (по заданию преподавателя). Для этого включить стенд, запустить приводной двигатель, включить возбуждение и установить ток возбуждения, при котором напряжение якоря соответствует заданному. Изменяя нагрузку генератора, изменять ток возбуждения таким образом, чтобы U = const.Измеренные значения тока якоря и тока возбуждения записать в табл.2.3.
Таблица 2.3
|
Iя |
|
|
Iв |
3. Обработка результатов и их анализ
3.1. По результатам измерений построить графики характеристик.
3.2. Вычислить изменение напряжения генератора при переходе от холостого хода к номинальной нагрузке:
U = (U0 - Uн / Uн ) 100 % ,
где U0 - напряжение генератора на холостом ходу.
3.3. Объяснить и проанализировать все полученные результаты.
4. Материал для самоподготовки
4.1. Общие сведения о машинах постоянного тока
Схема машины постоянного тока показана на рис. 4.1. Обмотка якоря 2 расположена на роторе и представляет собой замкнутую многофазную обмотку, подключенную к коллектору, состоящему из коллекторных пластин 3, изолированных друг от друга, и щеток А и В. Коллектор связывает обмотку якоря с внешней цепью нагрузки при работе машины генератором или с сетью питания при работе двигателем. Обмотка возбуждения располагается на полюсах статора и присоединяется к независимому источнику постоянного тока или к якорю. Магнитный поток возбуждения Фв этой обмотки неподвижен в пространстве.
При вращении обмотки якоря в неподвижном магнитном поле в ней индуцируется ЭДС с частотой
.
где р – число пар полюсов; n – частота вращения вала двигателя.
Коллектор осуществляет согласование частоты f2 с частотой сети постоянного тока f1=0, т.е. преобразует переменную ЭДС, индуцированную в обмотке якоря, в постоянную ЭДС между щетками А и В коллектора, и во внешней цепи протекает постоянный ток.
При холостом ходе машины магнитный поток создается только обмоткой возбуждения. При работе машины под нагрузкой обмотка якоря создает свой магнитный поток. Реакция якоря машины постоянного тока - воздействие магнитного поля якоря на магнитное поле машины. В результате реакции якоря магнитное поле машины искажается, что ведет к искрению под щетками. Кроме того, под действием реакции якоря магнитный поток машины при насыщенной магнитной цепи уменьшается, что приводит к уменьшению ЭДС по сравнению с ее значением при холостом ходе. Для исключения этого явления делают некоторые изменения в конструкции машины, однако самой действенной мерой является применение компенсационной обмотки, которая располагается в пазах главных полюсов и включается последовательно в цепь якоря таким образом, чтобы ее намагничивающая сила была направлена встречно с намагничивающей силой якоря и компенсировала ее действие. Компенсационная обмотка применяется в машинах средней и большой мощности.
4.1.1. Генераторы постоянного тока. Свойства генераторов зависят от способа питания их обмоток возбуждения, и в зависимости от этого они подразделяются на группы: генераторы последовательного, параллельного и смешанного возбуждений (рис. 4.2).
4.1.2. Двигатели постоянного тока. Свойства двигателей, как и генераторов, различаются в зависимости от способа включения обмотки возбуждения. Применяются двигатели с последовательным возбуждением, с параллельным возбуждением, со смешанным возбуждением. Одними из чаще всего применяемых типов двигателей постоянного тока являются двигатели серии 4П. Они различаются: по регулировочным свойствам - с нормальным регулированием частоты вращения: до 1-5; с широким регулированием - до 1-1000; тяжелым условиям эксплуатации (УХЛЗ и М8), соответствующим работе во вспомогательных механизмах металлургического производства и др. Для большинства двигателей номинальное напряжение - 110 и 220 В, диапазон частот вращения 750-4000 об/мин.
4.1.3. Микромашины. Примером микромашин могут служить универсальные коллекторные двигатели, которые широко применяются в устройствах автоматики и в бытовых машинах. Питание двигателей может осуществляться как от источников переменного однофазного тока, так и от источников постоянного тока. По принципу устройства двигатель сходен с двигателем последовательного возбуждения. Отличие заключается в конструкции магнитной системы и в том, что катушки его обмотки возбуждения состоят из двух секций с промежуточными выводами (рис. 4.3). Секционирование обмотки делается потому, что при работе на переменном токе из-за падения напряжения в индуктивном сопротивлении обмоток частота вращения двигателя оказывается меньше, чем на постоянном токе. Для выравнивания скоростей при работе на постоянном токе включаются все витки обмотки возбуждения, а при работе на переменном токе только часть их.
4.2. Двигатели постоянного тока
4.2.1. Общие сведения о двигателях постоянного тока Назначение: двигатели постоянного тока в основном используются в приводах, требующих регулирования скорости вращения в широком диапазоне. Двигатели имеют большой пусковой момент и могут быть выполнены практически на любую допустимую по механическим соображениям скорость вращения. Их достоинством является возможность экономичного и плавного регулирования.
Недостатки двигателя постоянного тока по сравнению с другими типами двигателей связаны с применением коллектора. Искрение, сопровождаемое подгоранием коллектора, и непостоянство щеточного контакта приводит к нестабильности характеристик и является источником радиопомех. Щеточная пыль загрязняет двигатель, что требует систематического ухода. В системах автоматического регулирования микродвигатели постоянного тока широко используются в качестве исполнительных двигателей.
Области применения. Первыми электрическими машинами были машины постоянного тока. Однако изобретенные М. О. Доливо-Добровольским асинхронные двигатели оказались проще, дешевле и надежнее в работе, поэтому асинхронные двигатели получили преимущественное распространение. Двигатели постоянного тока имеют ряд преимуществ, благодаря которым они сохранили свое значение в автоматике, некоторых областях промышленности и на транспорте. Основным достоинством этих двигателей является возможность плавного и экономичного регулирования скорости вращения в широких пределах. Микромашины постоянного тока широко используются в системах автоматики в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей. Двигатели постоянного тока находят применение на транспорте, для привода металлургических станков, в крановых, подъемно-транспортных и других механизмах. Генераторы постоянного тока применяются главным образом для питания радиостанций, двигателей постоянного тока, зарядки аккумуляторных батарей, сварки, электрохимических низковольтных установок, а также в качестве возбудителей синхронных машин.
4.2.2. Устройство. На рис. 4.4 представлена схема двухполюсной машины постоянного тока. Магнитный поток создается обмотками возбуждения 1, которые представляют собой катушки, надетые на полюсы 2, набранные из листовой электротехнической стали. Полюсы крепятся к магнитопроводящему ярму 3. Другая сторона полюсов заканчивается полюсными наконечниками 4, между которыми находится вращающийся якорь 5. Полюсы представляют собой пакет, набранный из листов электротехнической стали. У микромашин часто полюсы и ярмо штампуются как одно целое из одного листа. В пазах 6 якоря заложены проводники якорной обмотки. Якорь имеет цилиндрическую форму и набран из штампованных листов электротехнической стали. Между полюсными наконечниками и якорем имеется воздушный зазор, величина которого обычно имеет значение от долей миллиметра до нескольких миллиметров. На рис. 4.5 показано устройство микромашины постоянного тока, которая обычно имеет закрытое исполнение.
4.2.3. Обмотка якоря. Основные сведения. В машинах постоянного тока применяется двухслойная обмотка, у которой одна активная сторона каждого витка закладывается в верхнем слое одного паза, другая — в нижнем слое паза, отстоящего от первого приблизительно на расстоянии полюсного деления (рис. 4.5.). Таким образом, в каждом пазу имеется два слоя обмотки, отсюда и название: двухслойная обмотка. Основные составные части машины постоянного тока: 1 - подшипниковые щиты; 2-щетки; 3 - катушка обмотки возбуждения; 4 - корпус; 5 - полюс; 6 - вал; 7 - сердечник якоря; 8 - полюсный наконечник; 9 - обмотка якоря; 10 - коллектор; 11 - подшипник.
Часть обмотки, состоящая из одного или нескольких витков между двумя коллекторными пластинами, следующими друг за другом по схеме обмотки, называется секцией. Концы секций припаиваются к коллекторным пластинам таким образом, чтобы к концу одной секции присоединялось начало следующей. В результате вся обмотка будет состоять из последовательно соединенных секций.
В машинах, мощность которых превышает 0,6 кВт, секции обмотки обычно изготовляются с помощью шаблона. Для этого необходимо, чтобы все секции из верхнего слоя паза шли в нижний слой одного паза (рис. 4.7, а), такая обмотка называется равносекционной. При несоблюдении этого условия обмотка называется ступенчатой (рис. 4.7, б). В микромашинах обмотка закладывается через прорези в пазах якоря. Такая обмотка называется всыпной. Две стороны разных секций, располагающиеся одна над другой в верхнем и нижнем слоях, образуют элементарный паз.
Часто действительные пазы якоря выполняют таким образом, чтобы в них помещалось несколько элементарных пазов (рис. 4.8.). Расстояние, на котором располагаются активные проводники в порядке их следования по схеме обмотки, называются шагами обмотки. Расстояние между первым и вторым активными проводниками одной секции называется первым частичным шагом обмотки и обозначается y1. Расстояние между вторым активным проводником секции и первым активным проводником следующей по схеме обмотки секции называется вторым частичным шагом и обозначается у2.
Расстояние между первыми активными сторонами следующих друг за другом по схеме обмотки секций называется результирующим, или полным шагом обмотки и обозначается у. Полный шаг обмотки получается в результате прохождения первого и второго частичных шагов. Первый частичный, второй частичный и результирующий шаги обмотки измеряются числом элементарных пазов. Расстояние между коллекторными пластинами, к которым присоединяются стороны одной секции, называется шагом обмотки по коллектору или коллекторным шагом и обозначается ук. Коллекторный шаг ук измеряется числом коллекторных пластин.
Число коллекторных пластин всей обмотки обычно обозначается буквой К, число секций - S и число элементарных пазов - Zэ. В обмотках постоянного тока соблюдается равенство
K=S=Zэ.
4.2.4. Схемы и способы регулирование скорости вращения вала двигателя постоянного тока. Схема регулирования скорости вращения «генератор - двигатель». Для регулирования скорости вращения применяют специальные схемы питания двигателя. В случае, когда, двигатель питают отдельным генератором, удобно соединить якори обеих машин накоротко (рис. 4.10). Такая схема называется «генератор - двигатель». С одним концом вала приводного двигателя (дизельного, синхронного или асинхронного) соединен генератор постоянного тока Г, с другим - возбудитель В, который питает обмотки возбуждения генератора Г и двигателя постоянного тока Д. Вал двигателя Д соединен с валом исполнительного механизма ИМ.
Изменяя сопротивления регулировочных реостатов генератора (rвг) и двигателя (rвд), можно экономично изменять скорость вращения двигателя в широких пределах, зависящих от величины нагрузки. В среднем диапазон регулирования скорости вращения можно считать равным 1:10. Изменяя при помощи переключателя П полярность на якорях машины, можно изменять направление вращения двигателя. Часто для сглаживания пиков и толчков нагрузки на вал приводного двигателя ПД насаживают маховик М, который запасает энергию и отдает ее при резком переходе к большим нагрузкам. Сглаживающее действие маховика настолько велико, что мощность приводного двигателя ПД в некоторых случаях может быть меньше мощности двигателя Д. Это, например, практикуется в приводах к прокатным станам. Регулировочная характеристика. Регулировочная характеристика представляет зависимость скорости вращения n от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 4.11). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение. Современные способы регулирования частоты вращения электродвигателей постоянного тока. Принципы регулирования частоты вращения в двигательном режиме реализуются в четырех основных способах регулирования:
- реостатно-контакторное регулирование;
- регулирование по системе «генератор - двигатель»;
- регулирование по системе «управляемый выпрямитель - двигатель»;
- импульсное регулирование.
Подробно эти способы регулирования исследуются в курсах электропривода и теории автоматического регулирования. Здесь же будут рассмотрены только основные положения, имеющие непосредственное отношение к теории электрических машин. Реостатно-контакторное регулирование. В настоящее время это управление широко применяется для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для мощных двигателей.
Обычно при реостатно-контакторном управлении используются два метода регулирования:
- при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления;
- при повышенных частотах вращения изменяют ток возбуждения генератора.
Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой - в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса сопротивления изменяют ступенчато (рис. 4.12) с помощью контакторов. Если требуется точное регулирование, то контакторов должно быть очень много, вся установка становится громоздкой, дорогой и сравнительно малонадежной. Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют с помощью той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы. В связи со сложностью автоматизации и большими расходами на ремонт и эксплуатацию реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
Регулирование по системе «генератор-двигатель». В этой установке (рис. 4.13) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводится во вращение каким-либо первичным двигателем ПД (например, электродвигателем, дизелем) Регулирование частоты вращения осуществляют изменением:
- напряжения на якоре двигателя путем изменения тока возбуждения генератора IГ;
- магнитного потока двигателя путем регулирования тока возбуждения двигателя Iв.д.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двигателя, но при уменьшенном токе возбуждения генератора, т. е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т. е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят переменой полярности подводимого к якорю напряжения, для чего меняют направление тока в обмотке возбуждения генератора.
Система «генератор - двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т. п. Управление легко поддается автоматизации, так как осуществляется путем регулирования сравнительно небольших токов возбуждения.
Установки типа «генератор - двигатель» широко распространены в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем, в промышленности — трехфазным синхронным или асинхронным двигателем. Систему «генератор — двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 МВт и более при диапазоне регулирования частоты вращения 1 : 200 и точности поддержания заданной частоты вращения (погрешности) менее 1%.
В рассматриваемой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала увеличивая ток возбуждения двигателя, а затем, постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть.
Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя. Недостатки системы «генератор - двигатель» - большие масса, габариты, высокая стоимость установки; сравнительно низкий КПД (примерно 0,6-0,7), так как производится трехкратное преобразование энергии.
В последнее время на транспорте (в тепловозах, больших автомобилях, кораблях) вместо генератора постоянного тока в системе «генератор — двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить массу и уменьшить стоимость генератора. В промышленных установках такое усовершенствование обычно не применяется, так как для рекуперативного торможения требуется управляемый выпрямитель-инвертор, в связи с чем выгоднее перейти к схеме «управляемый выпрямитель - двигатель», исключив генератор и первичный двигатель.
Регулирование по системе «управляемый выпрямитель-двигатель». Развитие полупроводниковой техники позволило применить для регулирования частоты вращения двигателя управляемый выпрямитель, выполненный на тиристорах, где одновременно с выпрямлением производится регулирование выпрямленного напряжения (рис. 4.15). Применение системы «управляемый выпрямитель - двигатель» позволяет увеличить КПД и уменьшить массу установки. Если требуется быстрая остановка механизма с последующим реверсированием, то для рекуперативного торможения параллельно с выпрямителем ставят инвертор, т. е. еще один полупроводниковый преобразователь, позволяющий отдавать энергию от машины постоянного тока в сеть переменного тока.
Недостаток системы «управляемый выпрямитель - двигатель» - низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, из-за пульсаций напряжения возникают пульсации тока, что ухудшает работу двигателя: возрастают потери, ухудшается коммутация и т. д. Особенно велики пульсации тока при питании от сети однофазного тока (в электровозах переменного тока), где обеспечение удовлетворительной коммутации - серьезная проблема.
Импульсное регулирование частоты вращения. В последние годы в связи с развитием полупроводниковой техники широко применяют импульсный метод регулирования частоты вращения двигателей постоянного тока, при котором на двигатель с помощью импульсного прерывателя периодически подают импульсы напряжения определенной частоты.
Импульсный преобразователь (рис. 4.16,а) состоит из входного фильтра LС, электронного ключа ТК (транзисторного или тири-сторного), обратного диода Д и индуктивности L. В период времени t, когда электронный ключ замкнут (транзистор или тиристор открыт), питающее напряжение U подается полностью на якорь двигателя, и его ток ia увеличивается (рис. 4.16, б); когда электронный ключ разомкнут (транзистор или тиристор заперт), ток ia продолжает проходить через якорь двигателя и обратный диод Д под действием электромагнитной энергии, запасенной в индуктивностях (La + L) цепи якоря; при этом ток ia уменьшается. Частоты следования импульсов при номинальном режиме обычно составляет 200-400 Гц, вследствие чего период Т примерно на два порядка меньше постоянной времени цепи якоря. Поэтому за время импульса т ток в двигателе не успевает значительно возрасти, а за время паузы (Т) -уменьшиться.
Среднее напряжение, подаваемое на обмотку якоря, где La + L - индуктивность цепи якоря двигателя. Если параметры схемы выбраны так, что пульсация тока не превосходит 5-10%, то работа двигателя обычно удовлетворительна. Скоростные и механические характеристики двигателя 1, 2 и 3, полученные при различных коэффициентах регулирования а в таком режиме работы аналогичны соответствующим характеристикам двигателя при изменении питающего напряжения U. При уменьшении нагрузки двигателя с параллельным возбуждением возрастают пульсации тока якоря, и при некоторой критической нагрузке наступает режим прерывистых токов. Поскольку Iа = 0 при E=U, частота вращения при идеальном холостом ходе 0=n/(сеФ) не зависит от времени t, т. е. от коэффициента регулирования напряжения . Благодаря этому при некоторой критической частоте вращения nкр, когда двигатель переходит в режим изменения тока при работе импульсного прерывателя определяется по приближенной формуле:
. (4.1)
В настоящее время импульсное регулирование двигателей малой мощности и микродвигателей осуществляется с помощью импульсных прерывателей, в которых коммутирующими элементами являются транзисторы. Для регулирования двигателей средней и большой мощностей применяются прерыватели с тиристорами. Так как тиристор, в отличие от транзистора, не полностью управляемый вентиль, то для его запирания применяются различные схемы искусственной коммутации, обеспечивающие прерывание проходящего тока путем подачи на его электроды обратного напряжения. Торможение при импульсном регулировании. При работе двигателя от импульсного прерывателя возможны его рекуперативное и динамическое торможения. Наиболее интересная особенность рекуперативного торможения при импульсном регулировании - возможность осуществления его при ЭДС двигателя, меньшей напряжения сети. В связи с этим рекуперативное торможение может осуществляться почти до полной остановки.
При рекуперативном торможении импульсный прерыватель ИП включают параллельно якорю двигателя, диод Д - между якорем и питающей сетью (рис. 4.17, а). При отпирании прерывателя ИП якорь машины вместе с индуктивностью L замыкается накоротко. При этом увеличивается ток ia и накапливается электромагнитная энергия в индуктивностях (L + La), а возникающая ЭДС самоиндукции eL уравновешивает ЭДС машины Е (рис. 4.17, б). При запирании прерывателя ИП ток ia под действием ЭДС самоиндукции проходит через диод Д и накопленная энергия отдается в сеть. Среднее значение тока, отдаваемого в сеть, определяется разностью между средней ЭДС якоря Е и напряжением сети U.
Следовательно, при уменьшении частоты вращения якоря ток Iа, отдаваемый в сеть, уменьшается, хотя может оставаться постоянным, а, следовательно, и тормозящий электромагнитный момент. По мере снижения частоты вращения и ЭДС Е для поддержания требуемого значения тока Iа увеличивают частоту тока при частотно-импульсном регулировании или длительность импульса t при широтно-импульсном. При малой частоте вращения, когда растет до единицы, якорь машины остается все время замкнутым накоротко и отдача энергии в сеть прекращается. Однако ток Iа проходит через якорь, и режим торможения осуществляется практически до полной остановки. Динамическое торможение осуществляется аналогично, однако в схеме вместо сети и фильтра Сф включается реостат, в котором гасится энергия, отдаваемая машиной. Импульсное регулирование широко применяется при питании двигателей от сети постоянного тока, а также в автономных устройствах, где необходимо использовать аккумуляторы электрической энергии.
В схеме «управляемый выпрямитель - двигатель» и при импульсном регулировании в цепи якоря находится быстродействующий регулятор напряжения, благодаря чему могут быть существенно улучшены переходные процессы в двигателе, возникающие при резких колебаниях нагрузки, напряжения питающей сети и по другим причинам.
4.2.5. Механические характеристики двигателей. Механические характеристики n=f(M), показывающие связь между частотой вращения и моментом - основные характеристики двигателей.
M = cMФIa = cMkФIa2 = k2Ia2. (4.2)
В двигателе с параллельным возбуждением уравнение скоростной характеристики можно легко преобразовать в уравнение механической характеристики: т. е. скоростная характеристика превращается в механическую путем изменения масштаба по оси абсцисс (рис. 4.18, кривая 1).
Сравнение механических характеристик, показывает, что при изменении момента сопротивления на валу двигателя параллельного возбуждения со значения M1 до М2 скорость двигателя меняется незначительно. Такая характеристика называется жесткой. У двигателя с последовательным возбуждением при таком же изменении нагрузки на валу (от M1 до М2) скорость изменяется значительно - примерно в 1,5 раза. Такую характеристику называют мягкой.
Вид механической характеристики определяет устойчивость работы двигателя под нагрузкой. Анализ устойчивости работы проводят исходя из уравнения механики о равенстве моментов, приложенных к валу:
Мс=Jd/dt,
где Мс - статический момент нагрузки (учитывающий внутренние силы торможения); J - момент инерции вращающихся масс;
На рис. 4.19 показаны типичные зависимости статического момента от угловой скорости:
. (4.3)
- кривая 1- увеличение момента с увеличением скорости; типично для вентиляторов, насосов;
- кривая 2 - уменьшение момента с увеличением скорости; типично для транспортеров, бетономешалок, прокатных станов;
- кривая 3 - момент почти не зависит от скорости; типично для грузоподъемных механизмов, тяговых двигателей.
Исследуем устойчивость работы двигателя параллельного возбуждения при постоянном статическом моменте. Этот режим соответствует точке пересечения механической характеристики двигателя с кривой статического момента. Пусть на двигатель, работающий в точке А (рис.4.20), подействовала какая-то кратковременная сила, приведшая к небольшому снижению скорости. При этом вращающий момент двигателя возрастает и возникает избыточный ускоряющий момент МА, который приводит к увеличению скорости
Ml = M - MА= Jd/dt. (4.3)
вследствие чего устанавливается исходный режим, соответствующий точке А. Если кратковременная внешняя сила увеличивает скорость двигателя, то электромагнитный момент становится меньше статического, вследствие чего ротор замедляет вращение и возвращается в исходную точку А. Таким образом, работа двигателя в точке А устойчива: случайные причины, вызывающие небольшие отклонения от установившегося режима, не вызывают больших изменений в режиме работы, и после того, как эти причины исчезают, двигатель сам возвращается в исходный режим.
Аналогично считая, что имеются кратковременные небольшие возмущения, можно доказать, что двигатель с параллельным возбуждением, имеющий падающую механическую характеристику, работает устойчиво и при других типичных нагрузках.
4.3. Универсальные коллекторные двигатели
Общие сведения. Универсальным двигателем называется однофазный коллекторный двигатель последовательного возбуждения, предназначенный для работы от сети переменного или постоянного тока. В режиме номинальной нагрузки двигатель имеет одинаковую скорость вращения при работе на переменном и постоянном токах. Машина постоянного тока с самовозбуждением принципиально может работать от сети переменного тока, так как при изменении направления тока якоря изменяется направление потока обмотки возбуждения, вследствие чего вращающий момент действует в ту же сторону. Однако такая машина имела бы большие магнитные потери и малый вращающий момент. Для получения меньшего сдвига по фазе между током якоря и потоком возбуждения универсальный коллекторный двигатель выполняется только с последовательным возбуждением.
Якорь универсального двигателя идентичен якорю машин постоянного тока. Для уменьшения магнитных потерь вся магнитная система универсального двигателя, включая полюса и ярмо, набирается из изолированных листов электротехнической стали. Обычно обмотка возбуждения ОВ имеет отпайку (рис. 4.21), позволяющую при работе от сети переменного тока уменьшать число витков. Двигатели не имеют дополнительных полюсов и компенсационной обмотки. Для подавления радиопомех предусматриваются фильтры, обычно в виде конденсаторов, включаемых между токопроводящими зажимами и корпусом машины. Универсальные двигатели дают возможность при питании от сети переменного тока получить весьма высокую скорость вращения и позволяют плавно ее регулировать. Двигатели выполняются на скорости вращения до 40000 об/мин. Вследствие быстроходности они имеют малые размеры и вес. Пусковой момент двигателей большой, так как их обмотка возбуждения является последовательной.
Векторная диаграмма при работе от сети переменного тока. Временная векторная диаграмма показывает значение и фазу синусоидально изменяющихся во времени величин, характеризующих установившийся рабочий процесс. Модуль вектора диаграммы численно равен амплитуде величины, которую он представляет. Принято считать, что все векторы диаграммы вращаются против часовой стрелки с угловой скоростью . Проекция вектора на вертикальную ось дает мгновенное значение синусоидальной величины, которую изображает вектор. В некоторых случаях удобно считать векторы неподвижными, а ось вращающейся.
4.4. Генераторы постоянного тока
4.4.1. Общие сведения о генераторах постоянного тока. Назначение. Микромашины постоянного тока используются в качестве генераторов в различных установках радио- и проводной связи, на самолетах, автомашинах и др. Большое распространение в измерительной технике получили тахогенераторы постоянного тока.
Современные электрические станции вырабатывают энергию в форме трехфазного переменного тока. Значительная ее часть используется без преобразования в другие виды энергии. Однако на транспорте, в металлургической промышленности, в телефонной связи, для сварки, в некоторых схемах автоматического регулирования и т. д. необходимо или предпочтительнее использование постоянного тока. В этих случаях для выработки энергии часто используют электромашинные генераторы постоянного тока. Кроме того, генераторы постоянного тока применяют как возбудители синхронных генераторов, для питания радиостанций, электролиза и зарядки аккумуляторных батарей.
Уравнения напряжений и моментов. В обмотке якоря индуктируется э. д. с. Если по обмотке проходит ток Iа, то имеет место падение напряжения в сопротивлении rа цепи якоря, которое складывается из сопротивлений щеточного контакта и обмоток: якоря, дополнительных полюсов и компенсационной. В переходных режимах возникает также падение напряжения на индуктивности La якоря, согласно второму закону Кирхгофа:
. (4.4)
где u - напряжение на зажимах якоря.
Это выражение называют уравнением напряжения генератора. Оно показывает, что в любой момент времени э. д. с. генератора уравновешивается напряжением и падением напряжения в якоре.
При вращении якоря, даже в случае холостого хода, имеет место момент сопротивления М0 вращению, который обуславливается потерями в машине на трение, на вихревые токи и гистерезис. Этот момент называют моментом холостого хода. При нагрузке в результате взаимодействия тока якоря с магнитным потоком генератора возникает тормозной электромагнитный момент М. При всяком нарушении постоянства скорости вращения возникает динамический момент.
, (4.5)
где J — момент инерции якоря; — угловая скорость вращения, рад /сек.
В генераторном режиме эти моменты уравновешиваются механическим моментом Ммех приводного двигателя:
Ммех = М0 + М + МJ. (4.6)
Это выражение называют уравнением моментов генератора. Уравнение показывает, что в любой момент времени в генераторном режиме механический момент приводного двигателя уравновешивается моментами холостого хода, электромагнитным и динамическим.
Классификация по способу возбуждения. На рис. 4.22 дана классификация электрических машин по способу возбуждения. При электромагнитном возбуждении поток полюсов создается обмотками возбуждения, питаемыми постоянным током. В машинах с независимым возбуждением обмотки возбуждения питаются от постороннего источника тока. В машинах с самовозбуждением обмотка возбуждения питается током от якоря этой же машины. Самовозбуждение может осуществляться при параллельном соединении с якорем обмотки возбуждения, при последовательном соединении и при смешанном, когда одна обмотка возбуждения соединена параллельно с якорем, а другая последовательно. Машины с таким соединением обмоток соответственно называются машинами параллельного, последовательного и компаундного (смешанного) возбуждения.
4.2. Генераторы независимого возбуждения
Свойства генераторов анализируются с помощью характеристик, которые устанавливают зависимости между основными величинами, определяющими работу генераторов.
Такими основными величинами являются:
- напряжение на зажимах U;
- ток возбуждения Iв;
- ток якоря Iа или ток нагрузки I;
- скорость вращения n.
Обычно генераторы работают при n = const. Поэтому основные характеристики генераторов определяются при n = nн = const.
Существует пять основных характеристик генераторов:
- холостого хода;
- короткого замыкания;
- внешняя;
- регулировочная;
- нагрузочная.
Все характеристики могут быть определены как экспериментальным, так и расчетным путем. Рассмотрим основные характеристики генератора независимого возбуждения. Характеристика холостого хода (х. х. х.) U=f(iв) при I=0 и n=const определяет зависимость напряжения U или э. д. с. якоря Еа от тока возбуждения при холостом ходе (I=0, Р2=0). Характеристика снимается экспериментально.
Снятие характеристики целесообразно начать с максимального значения тока возбуждения и максимального напряжения (U = (1,15-1,25) UH (точка а кривой на рис. 4.23). При уменьшении iв напряжение уменьшается по нисходящей ветви аб характеристики сначала медленно ввиду насыщения магнитной цепи, а затем быстрее. При iв = 0 генератор развивает некоторое напряжение U00, обычно равное 2—3% от Uн, вследствие остаточной намагниченности полюсов и ярма индуктора. Если затем изменить полярность возбуждения и увеличить iB в обратном направлении, начиная с iB = 0, то при некотором iВ < 0 напряжение упадет до нуля (точка в, рис. 4.22), а затем U изменит знак и будет возрастать по абсолютной величине по ветви вг характеристики х. х. Когда ток iB и напряжение U достигнут в точке г такого же абсолютного значения, как и в точке а, ток iB уменьшаем до нуля (точка д), меняем его полярность и снова увеличиваем, начиная с iB = 0. При этом U меняется по ветви деа х. х. х. В итоге вернемся в точку а характеристики х. х. х. имеет вид неширокой гистерезиснои петли вследствие явления гистерезиса в магнитной цепи индуктора.
При снятии х. х. х. ток iB необходимо менять только в направлении, указанном на рис. 4.23 стрелками, так как в противном случае точки не будут ложиться на данную гистерезисную петлю, а будут рассеиваться.
Средняя штриховая х. х. х. на рис. 4.23 представляет собой расчетную х. х. х., которая в определенном масштабе повторяет магнитную характеристику генератора, и по ней можно определить коэффициент насыщения машины k. Характеристика холостого хода позволяет судить о насыщении магнитной цепи машины при номинальном напряжении, проверять соответствие расчетных данных экспериментальным и составляет основу для исследования эксплуатационных свойств машины.
Характеристика короткого замыкания (х. к. з.) I = f (iB) при U = 0 и n=const снимается при замыкании выходных зажимов цепи якоря генератора накоротко. Так как U = 0, то, Еа = IaRa, и поскольку Ra мало, то в условиях опыта э. д. с. Еа также должна быть мала. Поэтому необходимо проявлять осторожность и начинать снятие х. к. з. с минимальных значений iB, чтобы ток якоря не получил недопустимо большого значения. Обычно снимают х. к. з. до I = (1,25-1,5) Iн. Так как при снятии х. к. з. электродвижущая сила мала и поэтому поток мал и машина не насыщена, то зависимость I = f (iB) практически прямолинейна (рис. 4.23). При iB = 0 из-за наличия остаточного магнитного потока ток I 0 и в крупных машинах близок к номинальному току или даже больше его. Поэтому перед снятием х. к. з. такую машину целесообразно размагнитить, питая на холостом ходу обмотку возбуждения таким током возбуждения обратного направления, при котором будет U = 0. В размагниченной машине х.к.з. начинается с нуля (штриховая линия на рис. 4.24). Если х. к. з. снята без предварительного размагничивания машины (сплошная линия на рис. 4.24), то ее также целесообразно перенести параллельно самой себе в начало координат (штриховая линия на рис. 4.24).
4.3. Генераторы параллельного возбуждения
Самовозбуждение генератора параллельного возбуждения происходит при соблюдении следующих условий:
- наличия остаточного магнитного потока полюсов;
- правильного подключения концов обмотки возбуждения или правильного направления вращения.
Кроме того, сопротивление цепи возбуждения RB при данной скорости вращения n должно быть ниже некоторого критического значения или скорость вращения при данном RB должна быть выше некоторой критической величины. Для самовозбуждения достаточно, чтобы остаточный поток составлял 2-3% от номинального. Остаточный поток такой величины практически всегда имеется в уже работавшей машине. Вновь изготовленную машину или машину, которая по каким-либо причинам размагнитилась, необходимо намагнитить, пропуская через обмотку возбуждения ток от постороннего источника.
При соблюдении необходимых условий процесс самовозбуждения протекает следующим образом. Небольшая э. д. с, индуктируемая в якоре остаточным магнитным потоком, вызывает в обмотке возбуждения малый ток iB. Этот ток вызывает увеличение потока полюсов, а следовательно увеличение э. д. с, которая в свою очередь обусловливает дальнейшее увеличение iB, и т. д. Такой лавинообразный процесс самовозбуждения продолжается до тех пор, пока напряжение генератора не достигнет установившегося значения.
Если подключение концов обмотки возбуждения или направление вращения неправильны, то возникает ток I обратного направления, вызывающий ослабление остаточного потока и уменьшение э. д. с, вследствие чего самовозбуждение невозможно. Тогда необходимо переключить концы обмотки возбуждения или изменить направление вращения. В соблюдении этих условий можно убедиться, следя с помощью вольтметра с малым пределом измерения за напряжением якоря при замыкании и размыкании цепи возбуждения.
Полярность зажимов генератора при самовозбуждении определяется полярностью остаточного потока. Если при заданном направлении вращения полярность генератора необходимо изменить, то следует перемагнитить машину путем подачи тока в обмотку возбуждения от постороннего источника.
4.4. Генераторы последовательного возбуждения
В генераторах последовательного возбуждения iв = Iа = I и поэтому при n = const имеются только две независимые переменные: U и I. Вследствие этого такой генератор имеет только одну характеристику, а именно внешнюю U = f (I) при n = const (рис. 4.25, кривая 1). При увеличении I растет поток Ф и э. д. с. Еа. Поэтому в соответствии с равенствами с ростом I сначала U растет линейно, а при достижении насыщения рост U замедляется. При весьма больших I напряжение будет снова уменьшаться вследствие большой реакции якоря и большого падения напряжения RaI.
Характеристики холостого хода, короткого замыкания и другие могут быть сняты только при отсоединении обмотки возбуждения от якоря и питании ее от постороннего источника тока, как у генератора независимого возбуждения, причем источник должен иметь низкое напряжение и быть рассчитанным на большой ток. По данным этих характеристик можно построить характеристический треугольник, и тогда внешнюю характеристику можно построить по х. х. х. (кривая 2, рис. 4.26) и характеристическому треугольнику. Для этого треугольник нужно передвигать параллельно самому себе так, чтобы его вершина а скользила по х. х. х., и одновременно изменять его размеры пропорционально I. Тогда вершина б очертит внешнюю характеристику 1.
При коротком замыкании генератора последовательного возбуждения возникает чрезвычайна большой ток. Так как напряжение генератора последовательного возбуждения сильно изменяется с изменением нагрузки, то он не пригоден для питания большинства потребителей и применяется только в некоторых специальных установках.
4.5. Генераторы смешанного возбуждения
Генератор смешанного возбуждения самовозбуждается так же, как и генератор параллельного возбуждения и их х. х. х. аналогичны. Характеристику короткого замыкания генератора смешанного возбуждения можно снять только при питании параллельной обмотки возбуждения от постороннего источника, если действие последовательной обмотки является встречным, так как при согласном действии обмоток возбуждения возникает недопустимо большой ток короткого замыкания.
Если снять характеристики короткого замыкания при встречном включении последовательной обмотки и при отключении этой обмотки, то можно определить н. с. последовательной обмотки возбуждения в масштабе тока параллельной обмотки возбуждения. Тогда можно построить характеристический треугольник и для случая согласного включения последовательной обмотки возбуждения.
Снятие внешней, регулировочной и нагрузочной характеристик генератора смешанного возбуждения производится так же, как и у генератора параллельного возбуждения.
Нагрузочная характеристика представляет собой зависимость напряжения U от тока параллельной обмотки возбуждения, поэтому при согласном включении последовательной обмотки нагрузочная характеристика генератора смешанного возбуждения будет расположена выше нагрузочной характеристики генератора независимого или параллельного возбуждения. На рис. 4.27 кривая 1 представляет собой нагрузочную характеристику генератора смешанного возбуждения, кривая 2 - х. х. х. и кривая 3 - нагрузочную характеристику генератора независимого или параллельного возбуждения. На рис. 4.27 отрезок Ов равен суммарной н. с. возбуждения Fs, которая требуется для создания номинального напряжения при номинальном токе якоря, отрезок Оа равен FB - н. с. параллельной обмотки и отрезок ав равен Fс - н. с. последовательной обмотки возбуждения. Катет еж = бв определяет размагничивающее действие реакции якоря Fpя в масштабе н. с. возбуждения. Так как н. с. Fc и Fpя пропорциональны току якоря, можно рассматривать их совместное действие, т. е. определить н. с. F=Fc-Fp.я; гж = ав - бв = аб = де. В этом случае говорят, что при согласном включении последовательной обмотки ее действие аналогично намагничивающей реакции якоря и характеристический треугольник генератора имеет вид треугольника дег. Построение внешней характеристики генератора с помощью х. х. х. и характеристического треугольника производится в принципе так же, как и у генератора параллельного возбуждения.
На рис. 4.28 проведено сопоставление внешних и регулировочных характеристик генераторов различных типов. Генератор смешанного возбуждения с согласным включением последовательной обмотки возбуждения имеет самую благоприятную внешнюю характеристику. Его напряжение при надлежащем выборе н. с. последовательной обмотки мало изменяется с изменением нагрузки. У генератора смешанного возбуждения с встречным включением последовательной обмотки возбуждения действие последней эквивалентно увеличению размагничивающего действия реакции якоря. Вследствие этого с увеличением нагрузки напряжение генератора сильно падает. Поэтому этот генератор применяется редко.
4.6. Параллельная работа генераторов постоянного тока
Рассмотрим параллельную работу генератора, имеющего параллельное или независимое возбуждение, с сетью бесконечно большой мощности, т. е. при условии, что напряжение сети U = const.
Для подключения генератора (рис. 4.29) на параллельную работу с сетью необходимо привести якорь генератора во вращение с номинальной частотой, проверить соответствие полярности щеток генератора и проводов сети и установить такой ток возбуждения, при котором напряжение генератора Uг0=Е0 равно напряжению сети U. При обеспечении этих условий включение генератора не сопровождается броском тока. Условие Ur0= U проверяют с помощью нулевого вольтметра V.
Нагрузка генератора, подключенного к сети, регулируется изменением его ЭДС. Это можно сделать путем увеличения частоты вращения якоря или тока возбуждения. Удобнее, однако, воздействовать на ток возбуждения. Ток нагрузки Iн << Iа при заданном токе возбуждения можно определить графически по внешним характеристикам генератора 1 и 2, построенным при различных токах возбуждения (рис. 4.30). Например, при некотором токе возбуждения IВ (кривая 1) равенство напряжений генератора Uг и сети U имеет место в точке А при токе нагрузки Iн = 0. При токе возбуждения iв2 внешняя характеристика генератора (кривая 2) пересекается с линией U = const в точке В, соответствующей некоторому установившемуся значению Iн2 тока нагрузки. Работа генератора в этой точке устойчива: при случайном изменении тока нагрузки. Генератор с последовательным возбуждением. Устойчиво работать параллельно с сетью он не может, так как его напряжение U увеличивается при возрастании тока нагрузки Iн. Поэтому при случайном отклонении тока якоря от некоторого установившегося значения Iн (точка А), машина сбрасывает нагрузку или переходит в режим работы, соответствующий очень большому току.
Генератор со смешанным возбуждением имеет две точки пересечения с прямой U=const. Точка А соответствует неустойчивому режиму работы, а точка В - устойчивому. Однако и генератор со смешанным возбуждением для параллельной работы с сетью применяют редко, так как для него характерны броски тока при переходе из неустойчивого режима в устойчивый.
Иногда необходима параллельная работа двух одинаковых (или соизмеримой мощности) генераторов на общую нагрузку. Для генераторов параллельного возбуждения этот случай не представляет каких-либо затруднений и регулирование нагрузки сходно с описанным выше. Недостаток схемы с уравнительным проводом заключается в том, что при значительном расстоянии между генераторами сопротивление уравнительного провода становится соизмеримым с сопротивлением обмотки возбуждения, что влияет на распределение нагрузки генераторов.
От этого недостатка свободна схема с перекрестным включением обмоток возбуждения. В этой схеме IB1 = IВ2 - если по каким-либо причинам ток якоря одного генератора увеличится, а другого - уменьшится, то у них произойдет противоположное изменение токов возбуждения и ЭДС. Вследствие этого произойдет выравнивание токов якорей. Два генератора смешанного возбуждения, включенные на общую нагрузку, также требуют уравнительного провода между последовательными обмотками возбуждения (рис. 4.33).
4.7. Гашение поля в генераторах
Наиболее характерным аварийным режимом генератора постоянного тока является внезапное короткое замыкание в цепи якоря. При этом происходит резкое увеличение тока якоря и расстройство коммутации машины. Из-под щеток вылетает сноп искр, представляющий раскаленные частицы щетки. После отключения автоматом места короткого замыкания на якоре машины резко возрастает напряжение по двум причинам:
- отсутствует падение напряжения в якоре, так как ток становится равным нулю;
- при резком уменьшении тока якоря возникает ЭДС самоиндукции, которая складывается с ЭДС вращения.
Эти причины могут вызвать появление кругового огня на коллекторе: возрастает напряжение между смежными коллекторным пластинами и из-за осколков щеток ухудшается «санитарное» состояние коллектора. Возникший круговой огонь является внутренним коротким замыканием и существует до тех пор, пока существует ЭДС якоря. Важно подчеркнуть, что автомат защиты в данном случае не может прекратить круговой огонь, каким бы быстродействующим он ни был. Единственное средство для уменьшения повреждений от кругового огня - «гашение поля», т. е. - уменьшение магнитного потока. Быстродействующий выключатель в цепи обмотки возбуждения не может полностью решить вопрос, так как из-за большой индуктивности обмотки возбуждения возможно появление перенапряжений и повреждение изоляции.
Быстрое уменьшение тока возбуждения с ограничением уровня напряжения возможно при использовании схемы, представленной на рис. 4.34. Разрыв цепи обмотки возбуждения производится двухполюсным выключателем, а для снятия перенапряжений установлены два полупроводниковых диода. После отключения автомата ток в обмотке возбуждения продолжает проходить по ней в прежнем направлении, но через диоды он отдается в сеть, от которой питалась обмотка возбуждения. Таким образом, напряжение сети направлено встречно к току возбуждения и ток быстро уменьшается до нуля, после чего прекращается, так как его протеканию препятствуют диоды.
Приближенно время спада тока до нуля можно определить из уравнения:
, (4.7)
которое справедливо после размыкания контактов быстродействующего автомата. Более точно определить время гашения поля, с учетом нелинейности кривой намагничивания и действия вихревых токов, можно одним из численных методов расчета с применением ЭВМ.
4.8. Исполнительные двигатели и тахогенераторы
Общие положения. Исполнительными двигателями называются двигатели, которые применяются в системах автоматического управления и регулирования различных автоматизированных установок и предназначены для преобразования электрического сигналу (напряжение управления), получаемого от какого-либо измерительного органа, в механическое перемещение (вращение) вала с целью воздействия на соответствующий регулирующий или управляющий аппарат. Если напряжение и мощность сигнала малы для управления исполнительным двигателем, то применяются промежуточные усилители мощности (магнитные, электронные, полупроводниковые).
Номинальная мощность исполнительных двигателей обычно мала - от долей ватта до 500-600 Вт. К этим двигателям предъявляются большие требования по точности работы и быстродействию. Обычно требуется, чтобы зависимости момента М и скорости вращения n от напряжения сигнала (управления) Uу были по возможности линейными.
Существует ряд разновидностей исполнительных двигателей постоянного и переменного тока. Ниже кратко рассматриваются исполнительные двигатели постоянного тока.
Исполнительные двигатели нормальной конструкции по своему устройству аналогичны нормальным машинам постоянного тока. При якорном управлении ток возбуждения iB = const, а на якорь. Подается напряжение управления (Uу). Характеристики М = f (Uy) и n = f (Uy) при этом получаются практически линейными. При полюсном управлении на якорь подается напряжение Uа = const, а напряжение управления Uу подается на обмотку возбуждения. При этом требуется меньшая мощность управления, однако характеристика n = I (Uy) не будет линейной. Поэтому обычно применяется якорное управление.
Магнитоэлектрические машины. В связи с разработкой сплавов алии (Al - Ni), алнико (А1 - Ni - Со), а также ряда других сплавов, обладающих высокими магнитными свойствами, стало возможным изготовление машин без обмотки возбуждения, с постоянными магнитами на индукторе. В частности, с постоянными магнитами изготовляются исполнительные двигатели с якорным управлением мощностью до 50-100 Вт. С постоянными магнитами можно строить также генераторы и двигатели общего назначения мощностью до 5-10 кВт. Однако вследствие дороговизны указанных сплавов такие машины не получили до сих пор большого распространения.
Исполнительные двигатели с полым немагнитным якорем (рис. 4.35) вследствие малой инерции якоря обладают большим быстродействием. Полый якорь в виде стаканчика изготовляется из пластмассы, и на нем размещается и укрепляется якорная обмотка обычного типа, соединенная с коллектором. Внутренний неподвижный ферромагнитный сердечник (статор) при якорном управлении может быть массивным. Из-за наличия большого немагнитного зазора между внешним и внутренним статорами требуется сильная обмотка возбуждения, габариты машины увеличиваются, а к. п. д. уменьшается. Подобные двигатели выпускаются мощностью до 10-15 Вт.
Основные детали и узлы (рис.4.36): 1 - передний щит; 2 - щеткодержатель; 3 - крышка смотрового люка; 4 - коллектор; 6 - обмотка возбуждения; 7 - полюс; 8 - полый якорь; 9 - внутренний статор; 10 - задний щит.
Двигатели с печатной обмоткой якоря (рис. 4.36) также обладают малой инерцией. Якорь этого двигателя имеет вид тонкого диска из немагнитного материала (текстолит, стекло и т. д.), на обеих сторонах которого расположены медные проводники обмотки якоря. Проводники выполняются путем гальванического травления листов медной фольги, наклеенных на диск якоря, либо гальваническим осаждением или переносом меди. Обмотка, изготовляемая таким способом, получила название печатной. Схема обмотки якоря обычная, двухслойная, причем проводники отдельных слоев расположены на разных сторонах диска и соединяются электрически между собой через отверстия в диске. Серебряно-графитные щетки скользят по неизолированной поверхности элементов обмотки якоря, как по коллектору.
Возбуждение осуществляется с помощью постоянных магнитов или обмотки возбуждения. Напряжение таких машин составляет 6-50 В. Ввиду хороших условий охлаждения допустимы большие плотности тока в обмотке якоря (до 30-40 A/мм2 при продолжительном режиме работы). В случае необходимости быстрого торможения после снятия напряжения сигнала диск якоря изготовляется из алюминия.
Тахогенераторы представляют собой маломощные электрические генераторы (обычно до Ps= 10 - 50 Вт), которые служат в системах автоматики для преобразования скорости вращения в электрический сигнал (напряжение Uc). От тахогенераторов требуется линейная зависимость Iс = I (n) с точностью до 0.2-0,5%, а иногда с точностью до 0,01%. В маломощных тахогенераторах при n = 1000 об/мин напряжение ic = 3-5 А.
Большинство тахогенераторов имеет обычную конструкцию машин постоянного тока с независимым возбуждением при iB - const или с постоянными магнитами. 1 - диск якоря с обметкой, 2 - вал, 3 - втулка, 4 - щетки и щеткодержатель, 5 - постоянные магниты (полюсы), 6 - полюсные наконечники, 7 и 8 - диски из магнитно-мягкой стали (см. рис. 4.36). При необходимости уменьшения механической инерции и устранения зубцовых пульсаций напряжения применяют конструкцию с полым якорем.
В последнее время разрабатываются также униполярные тахогенераторы с электромагнитным возбуждением или с постоянными магнитами При этом отсутствуют коллекторные пульсации напряжения, однако Uc мало. Исполнительные двигатели и тахогенераторы нормальной конструкции и с постоянными магнитами выпускаются серийно. Широко применяются также исполнительные двигатели и тахогенераторы переменного тока.
5. Контрольные вопросы
5.1. Устройство машин постоянного тока.
5.2. Устройство обмотки якоря машин постоянного тока.
5.3. Формулы ЭДС и электромагнитного момента машин постоянного тока.
5.4. Что такое реакция якоря?
5.5. Пояснить схему работы «генератор-двигатель».
5.6. Приведите схемы генератора с независимым, последовательным и смешанным возбуждением.
5.7. Основные характеристики генератора.
5.8. Генераторы независимого возбуждения.
5.9. Генераторы параллельного возбуждения.
5.10. Генераторы последовательного возбуждения.
5.11. Генераторы смешанного возбуждения.
5.12. Параллельная работа генераторов постоянного тока.
5.13. Гашение поля в генераторах.
5.14. Тахогенераторы.
5.15. Процесс самовозбуждения в машинах постоянного тока.
5.16. Процесс коммутации в машинах постоянного тока.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Кацман, М.М. Электрические машины [Текст]/ М.М. Кацман. – М.: Академия, 2003. – 496 с.:ил.
2. Пиотровский, Л.М. Электрические машины [Текст]/ Л. М. Пиотровский. – Л.: Энергия, 1972. – 504 с.: ил.
3. Кацман, М.М. Лабораторные работы по электрическим машинам и электроприводу [Текст]/ М.М. Кацман. – М.: Академия, 2003. – 256 с.:ил.
4. Электротехнический справочник. Под общей редакцией П. Г. Грудинского. Изд. 5-е, испр.[Текст] - М.: Энергия, 1975. – 776 с.: ил.
5. Вольдек, А.И. Электрические машины. Учебник для студентов высших учебных заведений [Текст] / А.И. Вольдек. – Л.: Энергия, 1978. – 832с.
6. Кулик, Ю.А. Электрические машины [Текст] / Ю.А. Кулик. – М.: Высшая школа, 1966. – 528с.
Александр Николаевич Шпиганович
Кирилл Дмитриевич Захаров
Исследование генератора постоянного тока
Методические указания к лабораторной работе №3 по дисциплине
"Электрические машины"
Издаётся в авторской редакции
Подписано в печать Формат 60х84 1/16 Бумага офсетная.
Ризография. Печ. л. 2,3 Тираж 100 экз. Заказ №
Липецкий государственный технический университет
398600 Липецк, ул. Московская, 30
Типография ЛГТУ, 398600 Липецк, ул. Московская, 30
EMBED Visio.Drawing.11 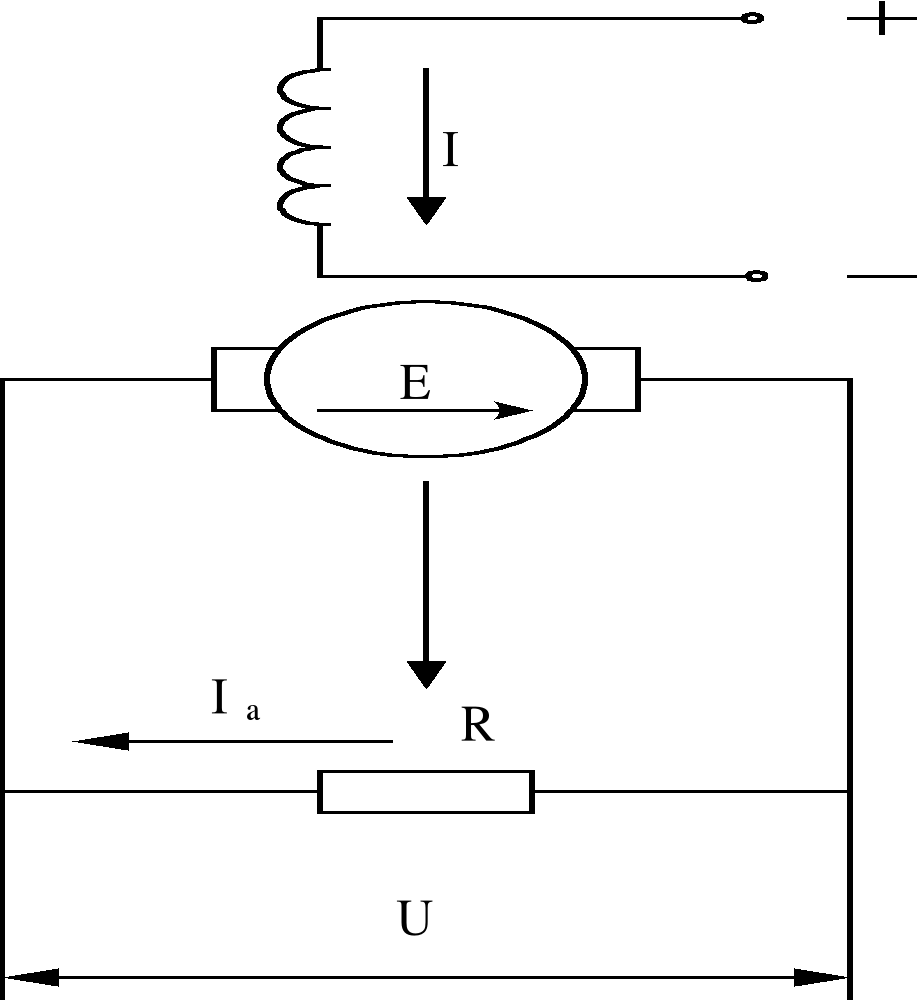
EMBED Visio.Drawing.11 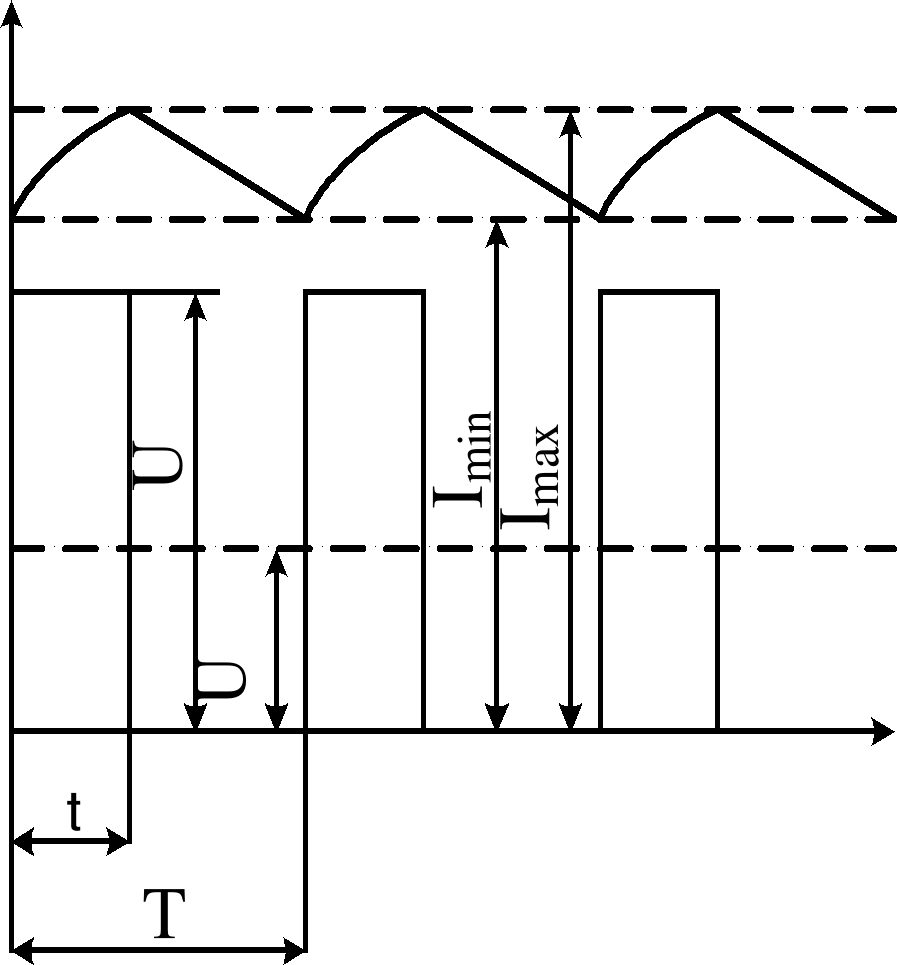
EMBED Visio.Drawing.11 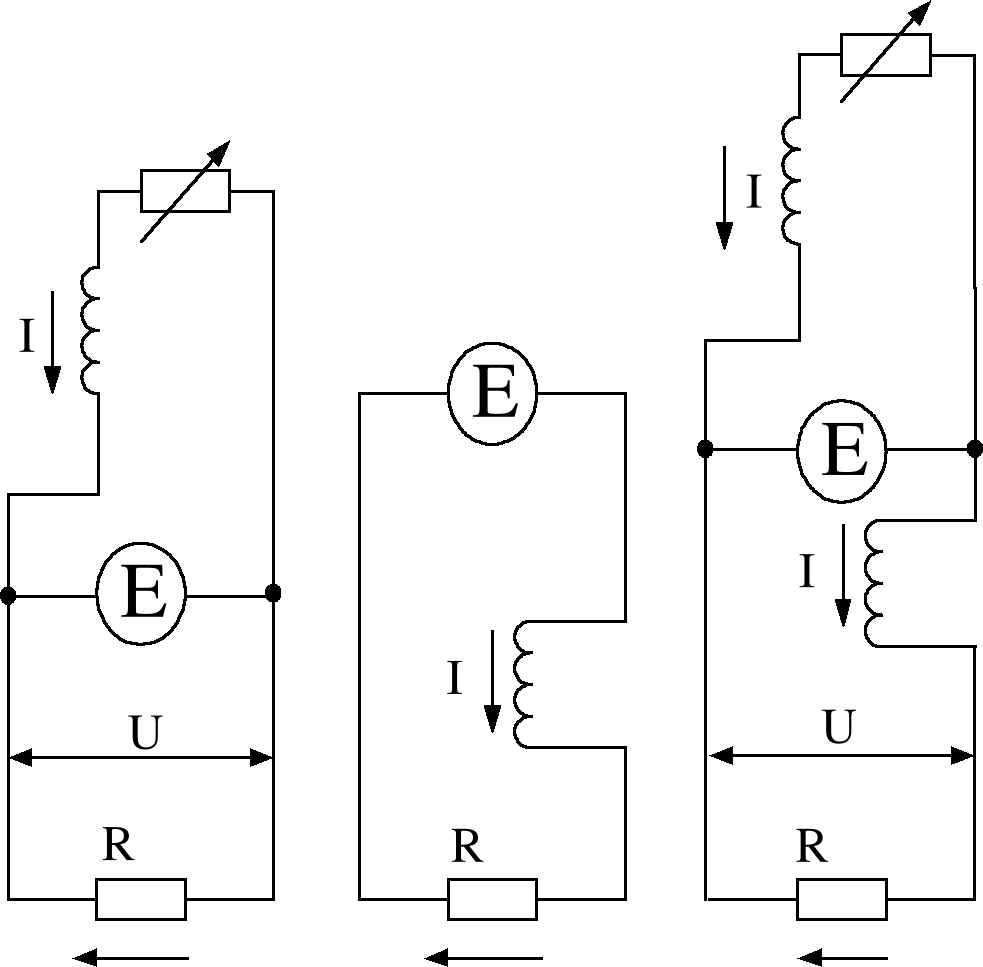
Рис.4.2. Схема возбуждения генераторов с параллельным, последовательным и смешанным возбуждением
Рис. 4.9. Схема простой петлевой обмотки:
а - схема обмотки; б -таблица схемы
EMBED Visio.Drawing.11 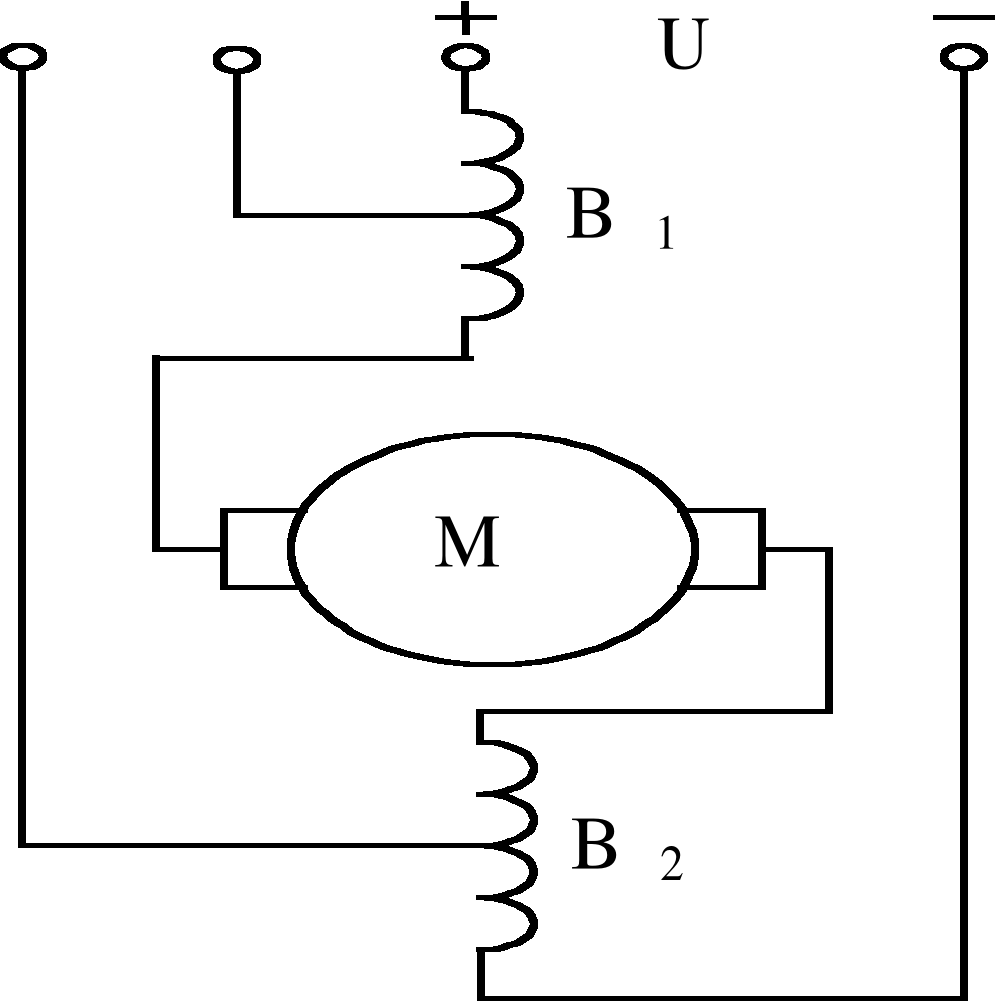
Рис. 4.3. Схема универсального коллекторного микродвигателя
EMBED Visio.Drawing.11 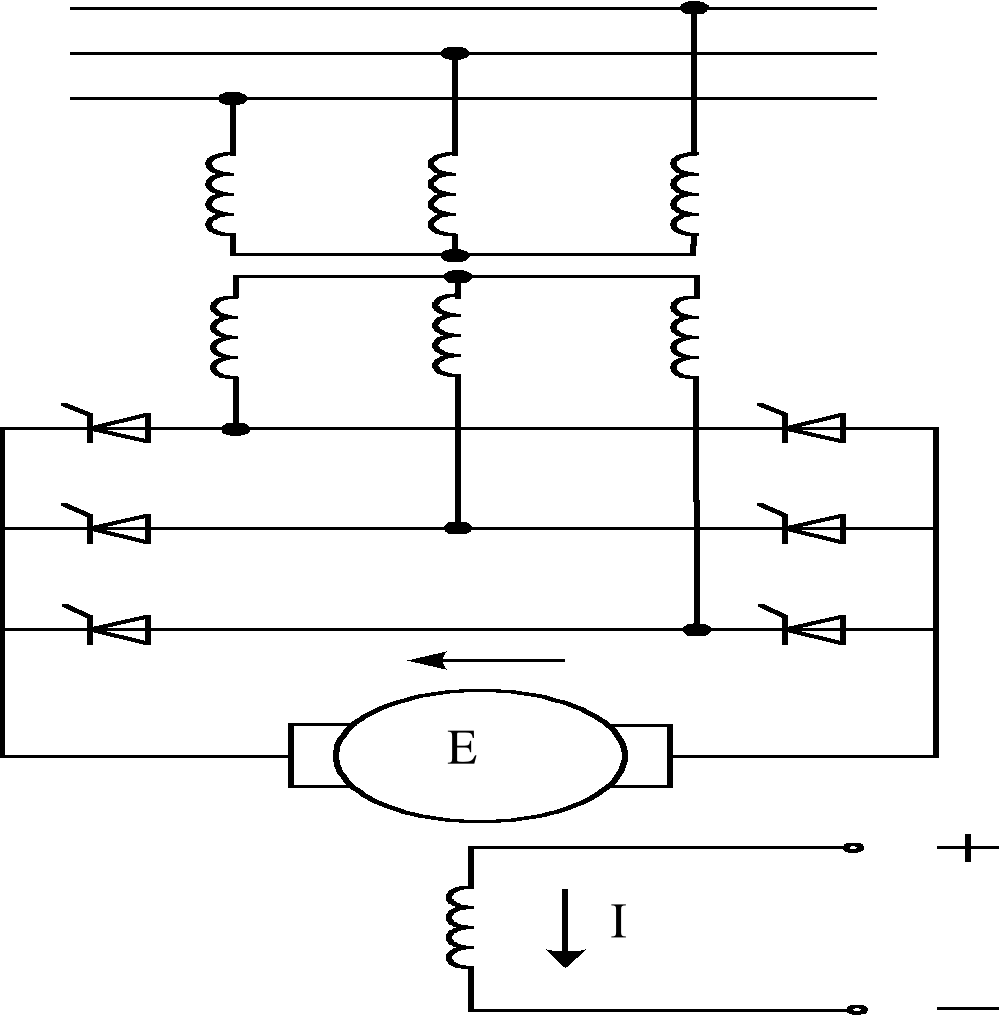
EMBED Visio.Drawing.11 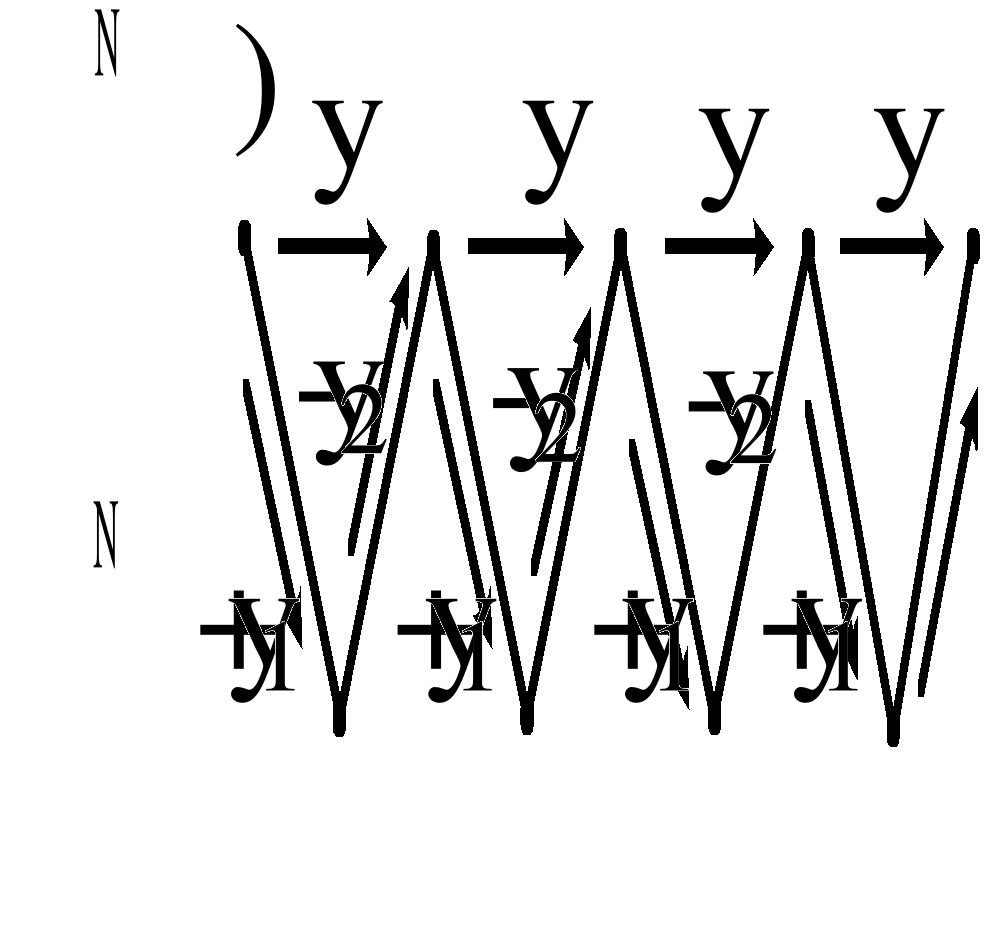
Рис. 4.4. Устройство машины постоянного тока
Рис. 4.5. Машина постоянного тока
Рис. 4.8. Действительные и элементарные пазы
Рис. 4.7. Расположение секций обмоток
в пазах якоря:
а - равносекционная обмотка;
б - ступенчатая
обмотка
Рис. 4.6. Расположение витков двухслойной обмотки
EMBED Visio.Drawing.11 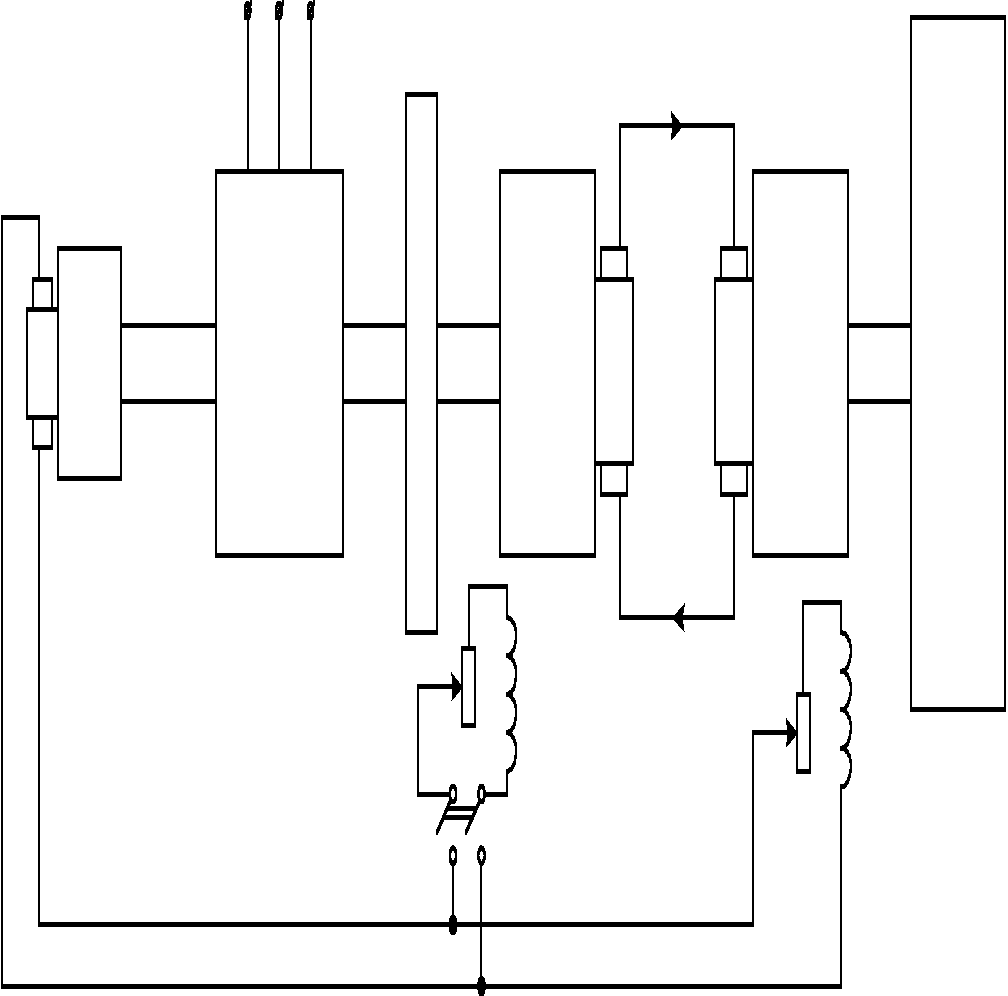
Рис. 4. 10. Схема «генератор-двигатель»
Рис. 4.11. Регулировочная
характеристика двигателя
Рис. 4.12. Скоростные характеристики
EMBED Visio.Drawing.11 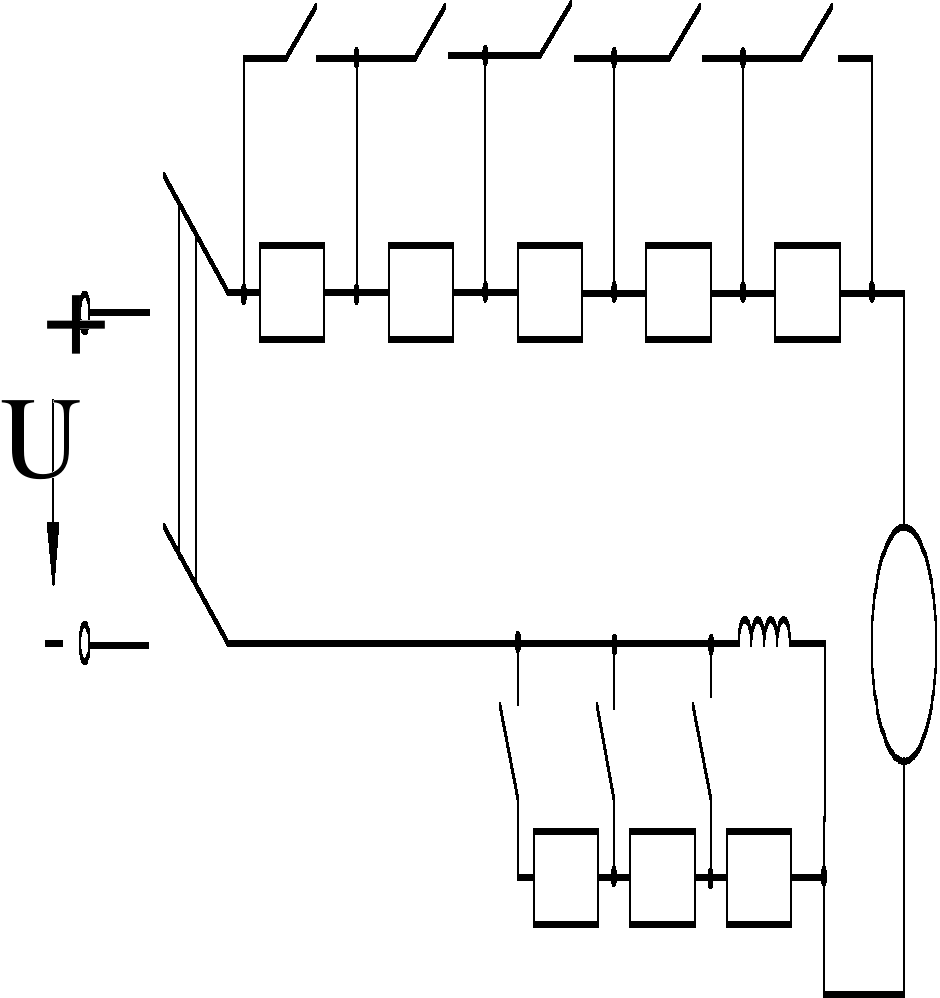
Рис. 4.13. Схема реостатно-контакторного регулирования частоты вращения двигателя с последовательным возбуждением
EMBED Visio.Drawing.11 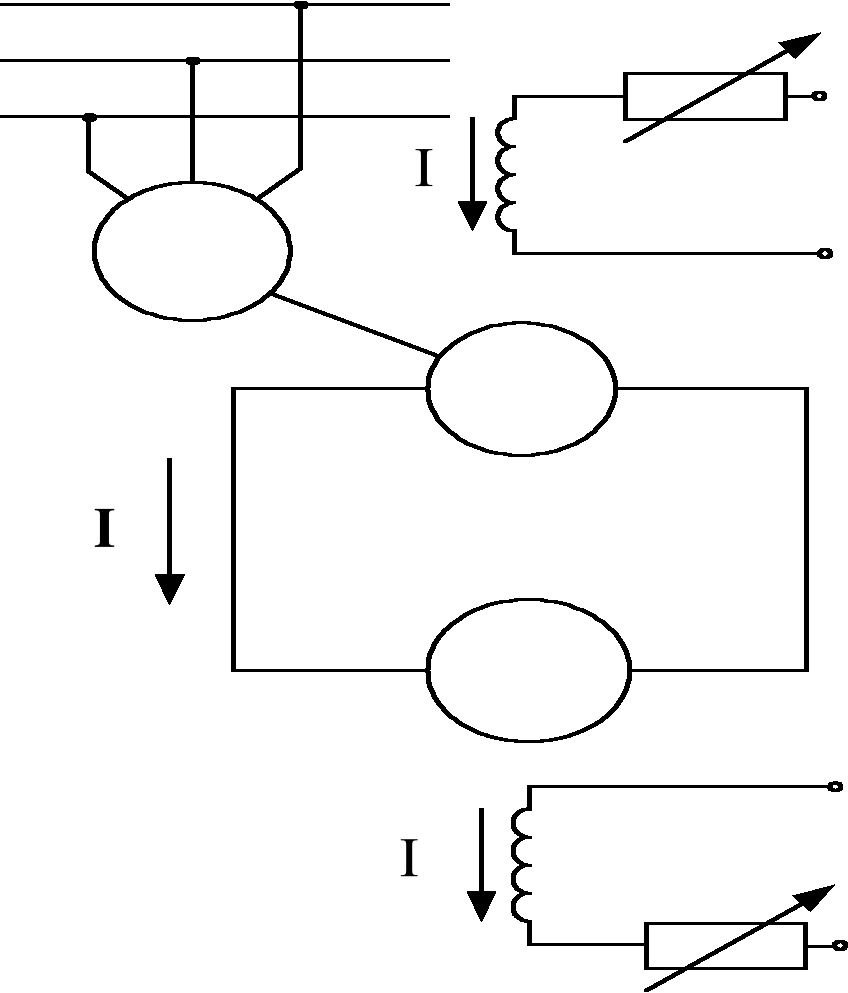
Рис. 4.14. Схема «генератор-двигатель»
EMBED Visio.Drawing.11 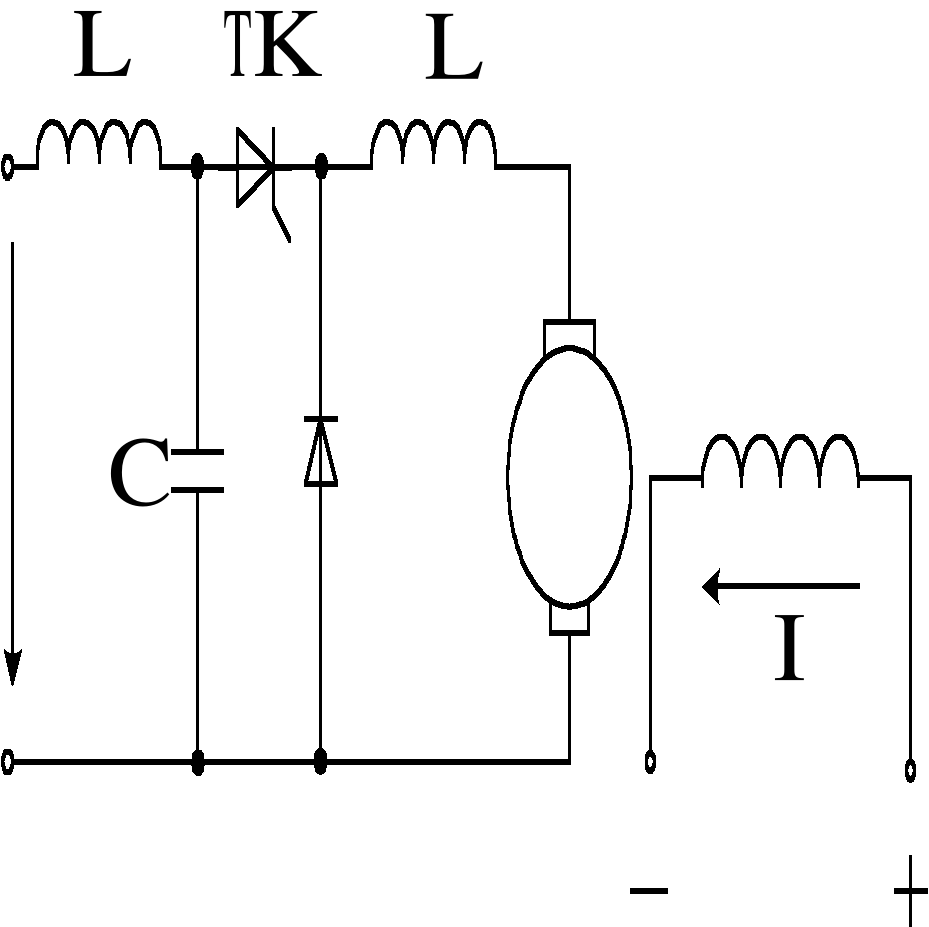
Рис. 4.16. Импульсный преобразователь:
а) схема подсоединения; б) изменение тока при включении и отключении контакторов
EMBED Visio.Drawing.11 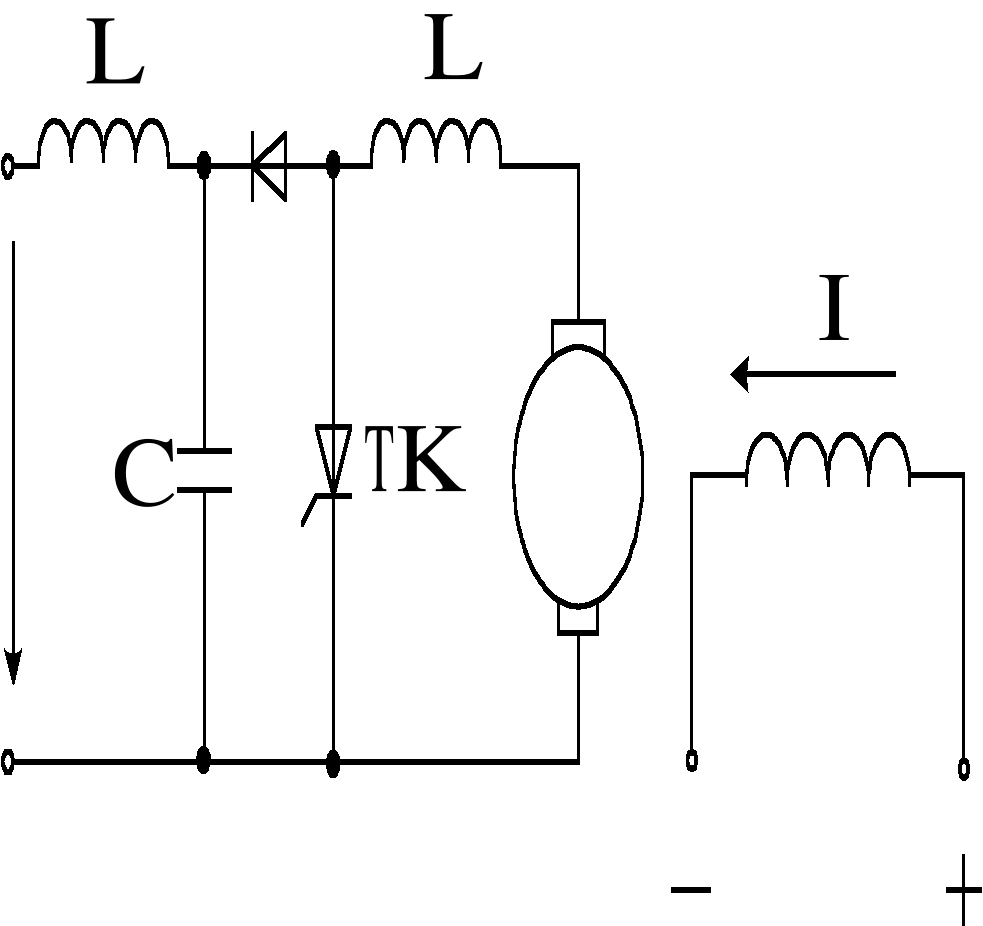
EMBED Visio.Drawing.11 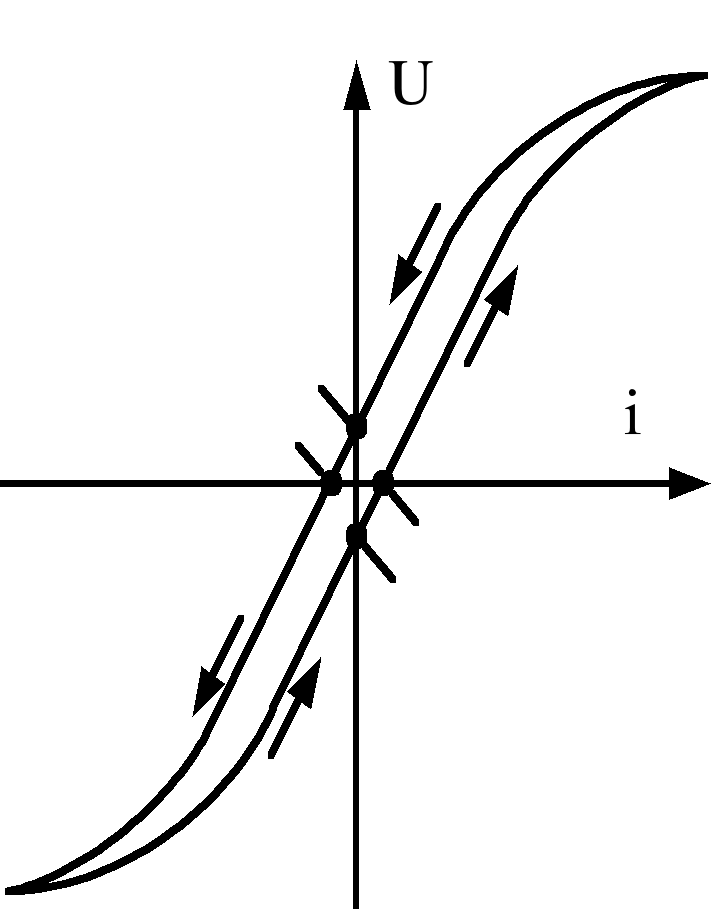
Рис. 4.19. Типичные кривые Mcт=f(n)
Рис. 4.26. Внешняя характеристика генератора последовательного возбуждения
EMBED Visio.Drawing.6 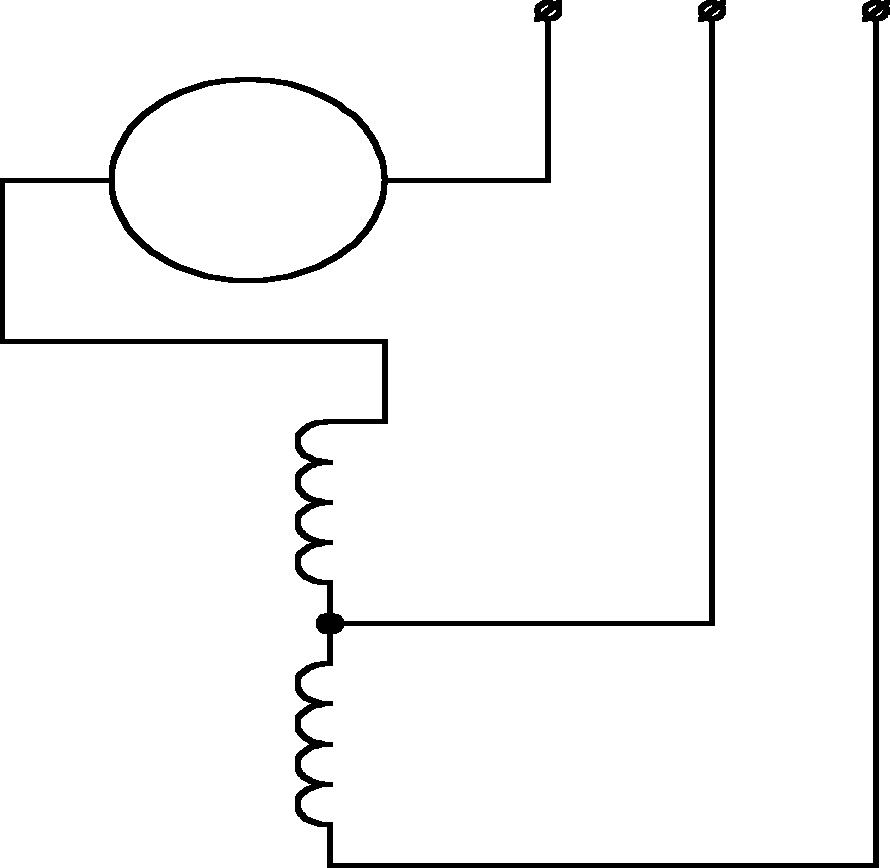
Рис. 4.21. Схема универсального коллекторного двигателя.
Рис. 4.24. Характеристика короткого замыкания генератора
EMBED Visio.Drawing.11 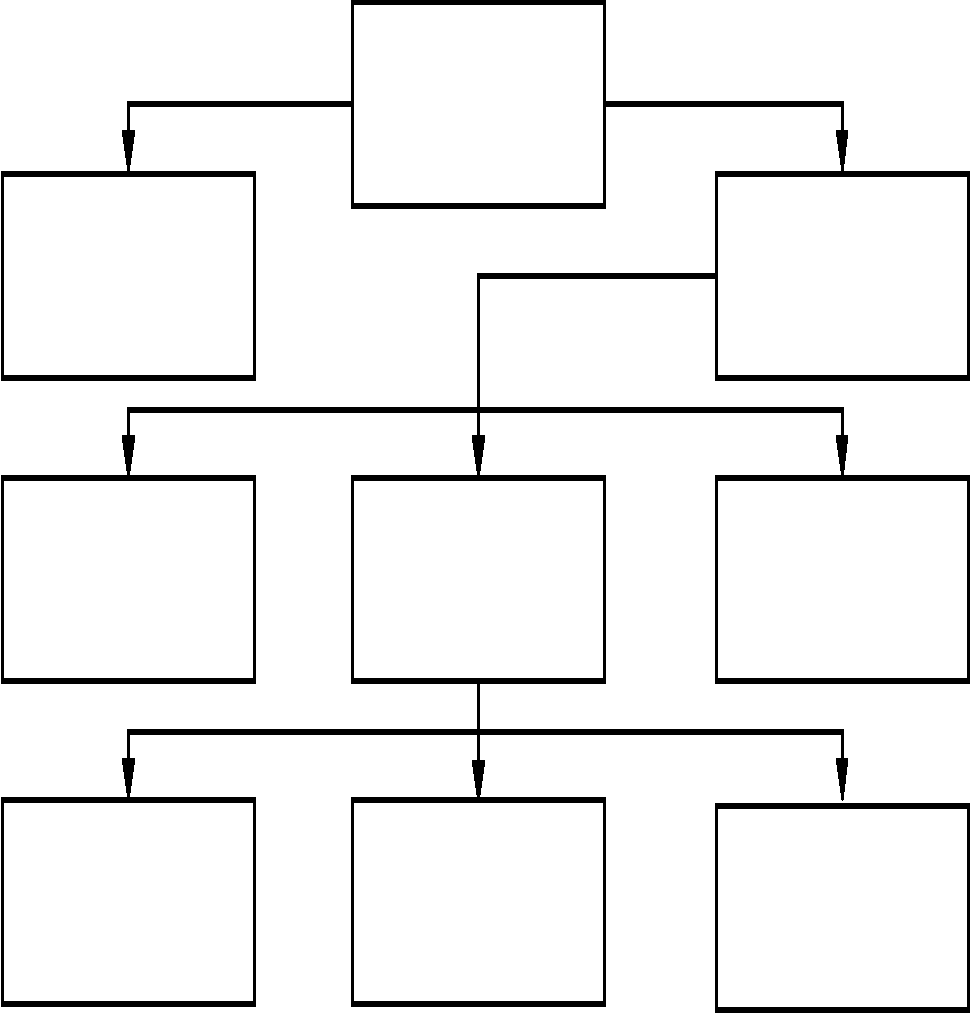
Рис. 4.22. Схема классификации электрических машин по способу возбуждения
Рис. 4.23. Характеристика холостого хода генератора независимого возбуждения
EMBED Visio.Drawing.11 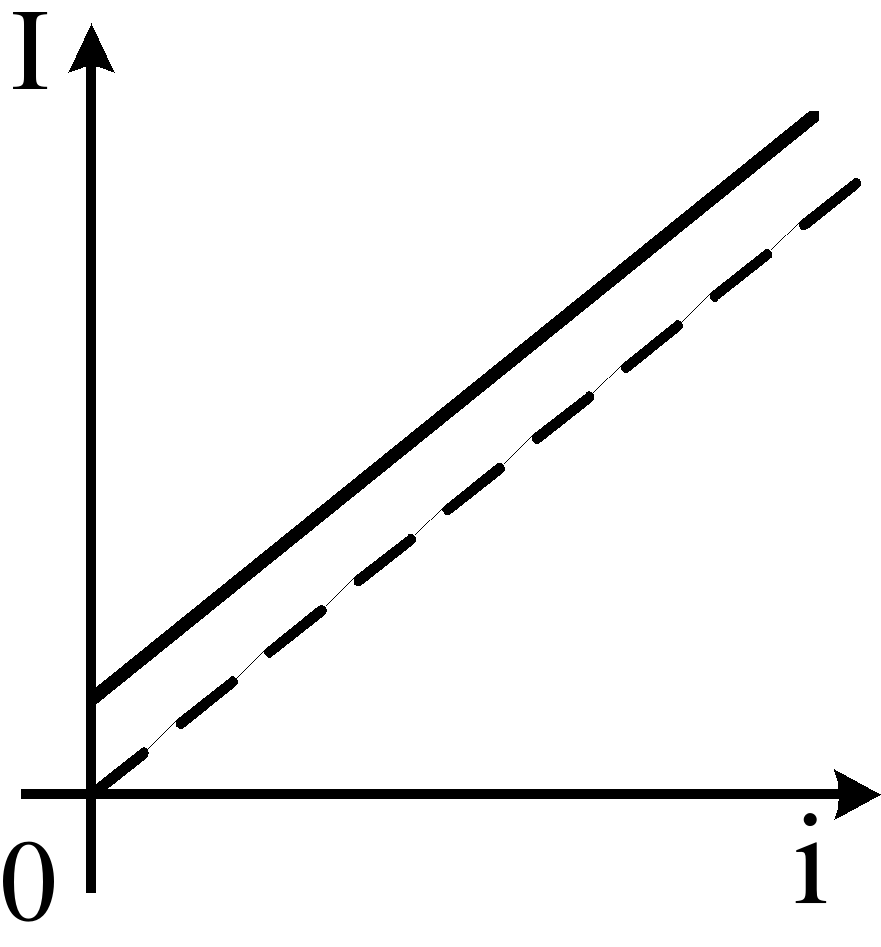
Рис. 4.25. Характеристика холостого хода генератора параллельного возбуждения
EMBED Visio.Drawing.11 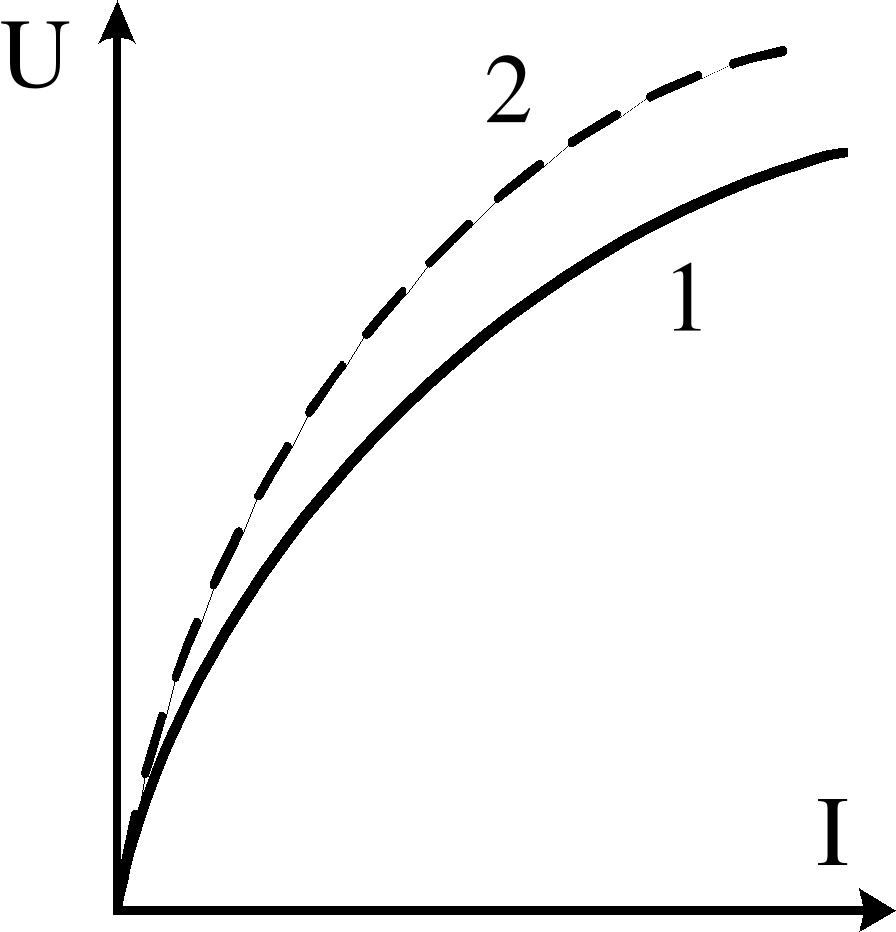
Рис. 4.27. Построение внешней характеристики генератора смешанного возбуждения с помощью характеристики холостого хода и характеристического треугольника
Рис.4.28. Сравнение внешних (а) и регулировочных (б) характеристик генераторов независимого (1), параллельного (2), смешанного возбуждения с согласным (3) и встречным (4) включением
Рис. 4.29. Схема подключения генератора
с параллельным
возбуждением к сети
ис 4.31. Включение двух генераторов последовательного возбуждения на общую нагрузку
EMBED Visio.Drawing.11 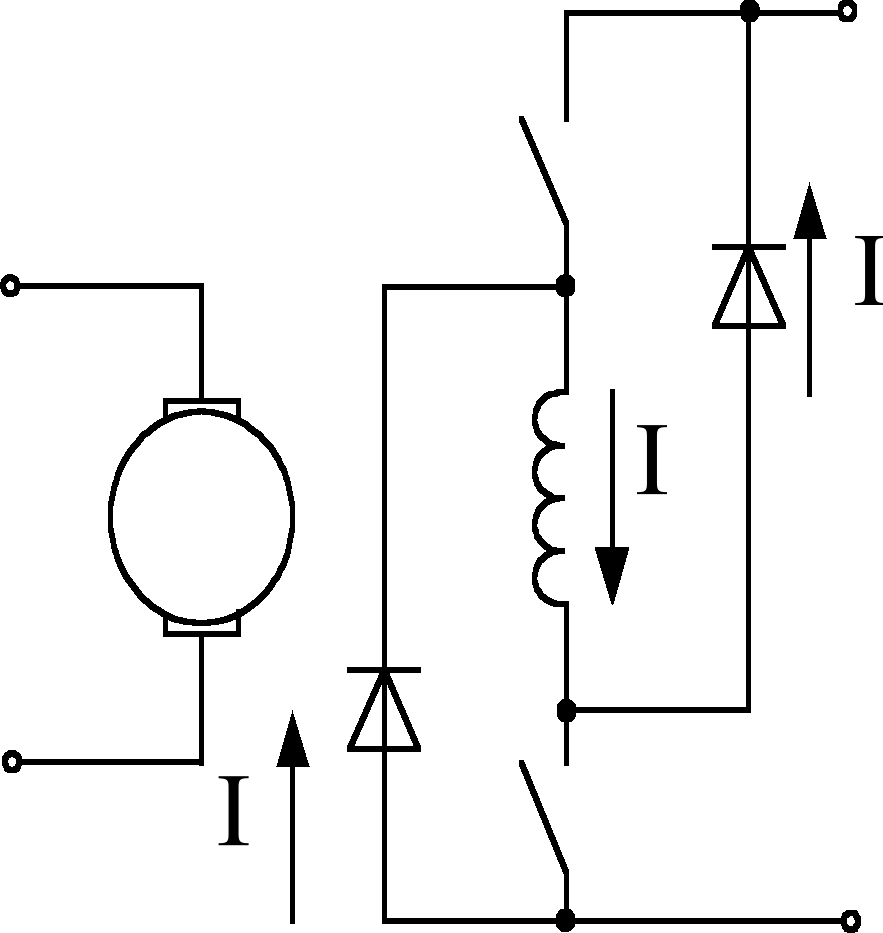
Рис. 4.35. Исполнительный двигатель постоянного тока с полым немагнитным якорем
Рис 4.36. Двигатель постоянного тока с
печатной обмоткой якоря:
а - разрез двигателя, б - обмотка якоря
Рис. 4.1. Схема машины постоянного тока:
Рис.4.15.Схема
«управляемый
выпрямитель-двигатель»
Рис. 4.17. Схема рекуперативного торможения двигателя постоянного тока при импульсном регулировании
EMBED Visio.Drawing.11 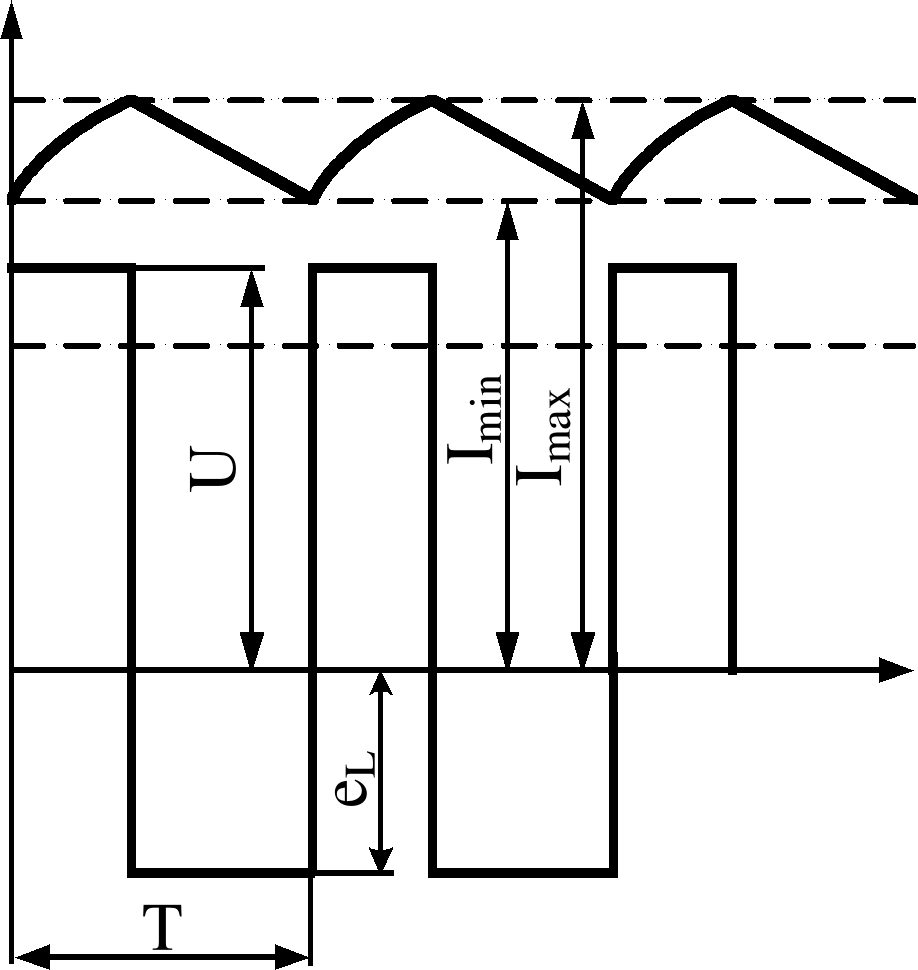
EMBED Visio.Drawing.11 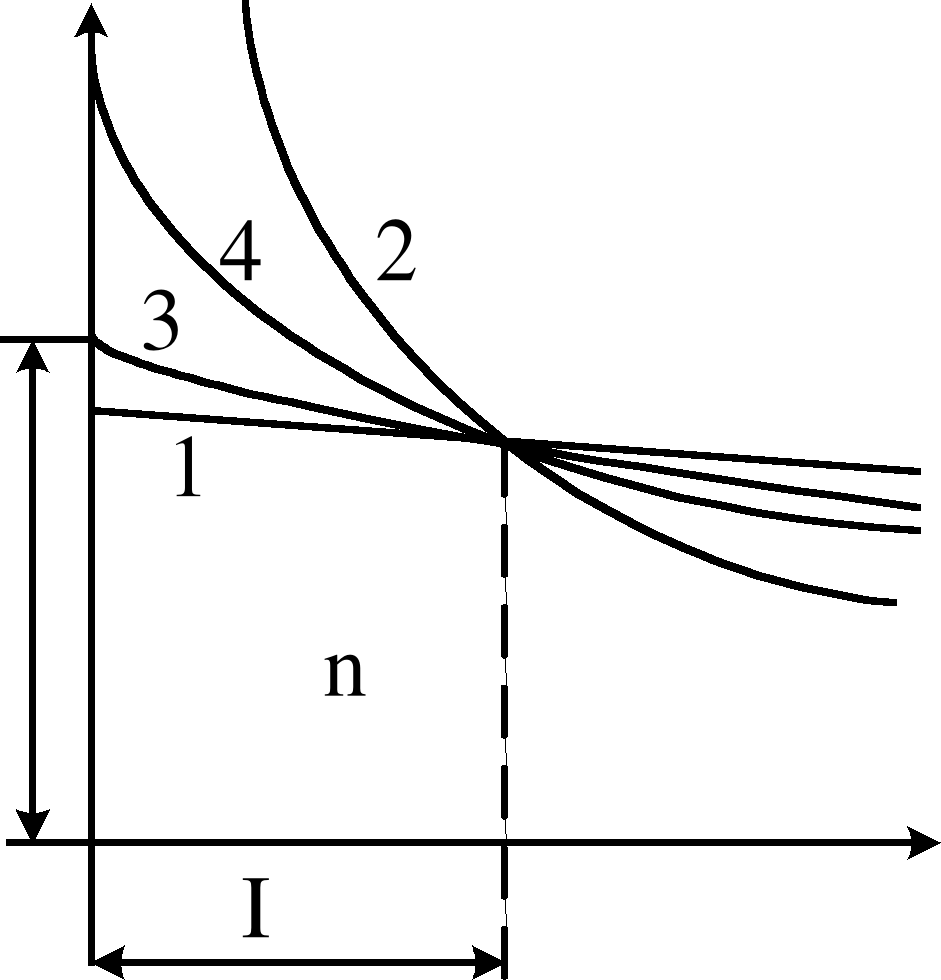
Рис. 4.18. Механические
характеристики двигателей
постоянного тока
EMBED Visio.Drawing.11 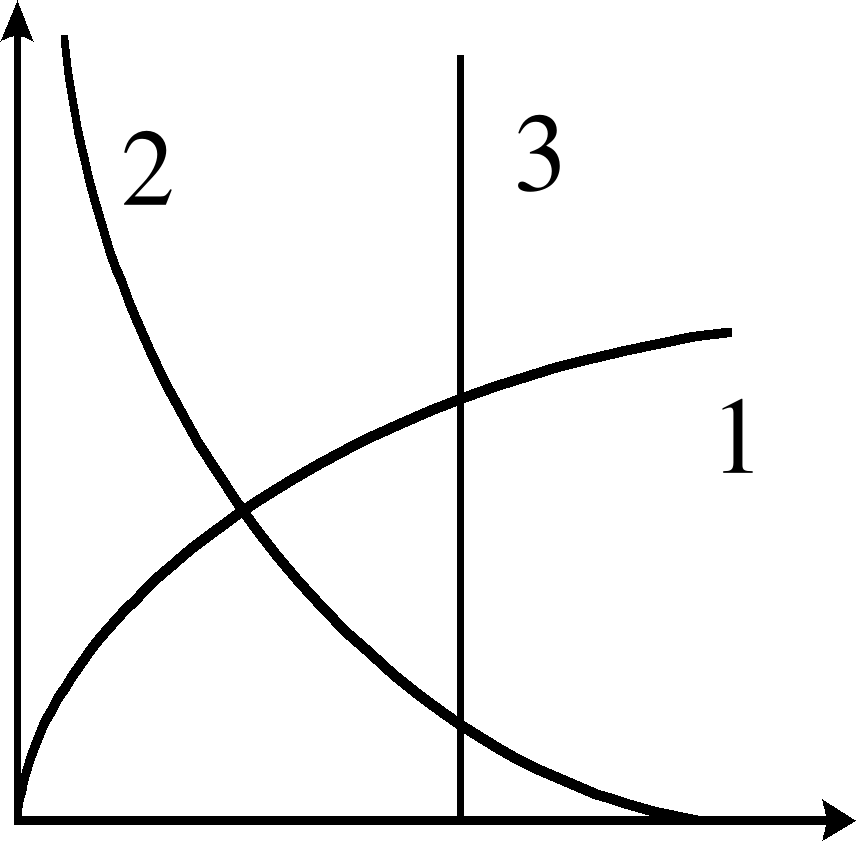
Рис. 4.20. Анализ устойчивости работы двигателя с параллельным возбуждением: а — обычная характеристика двигателя, б — характеристика при сильном размагничивающем действии якоря
EMBED Visio.Drawing.11 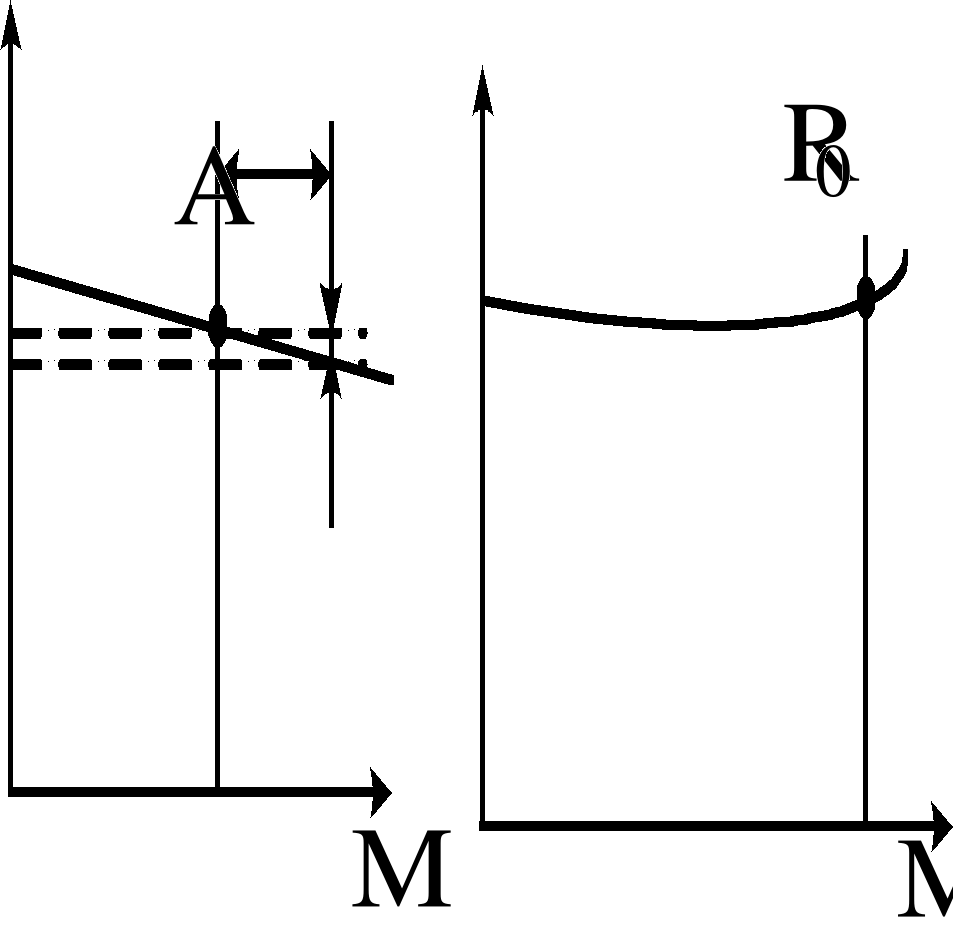
EMBED Visio.Drawing.11 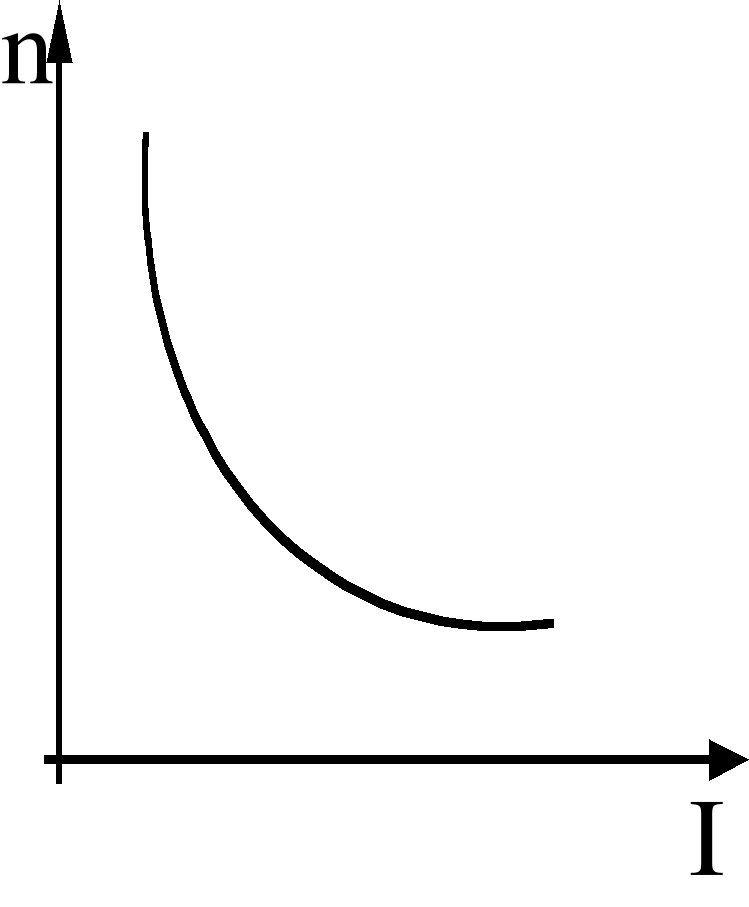
EMBED Visio.Drawing.11 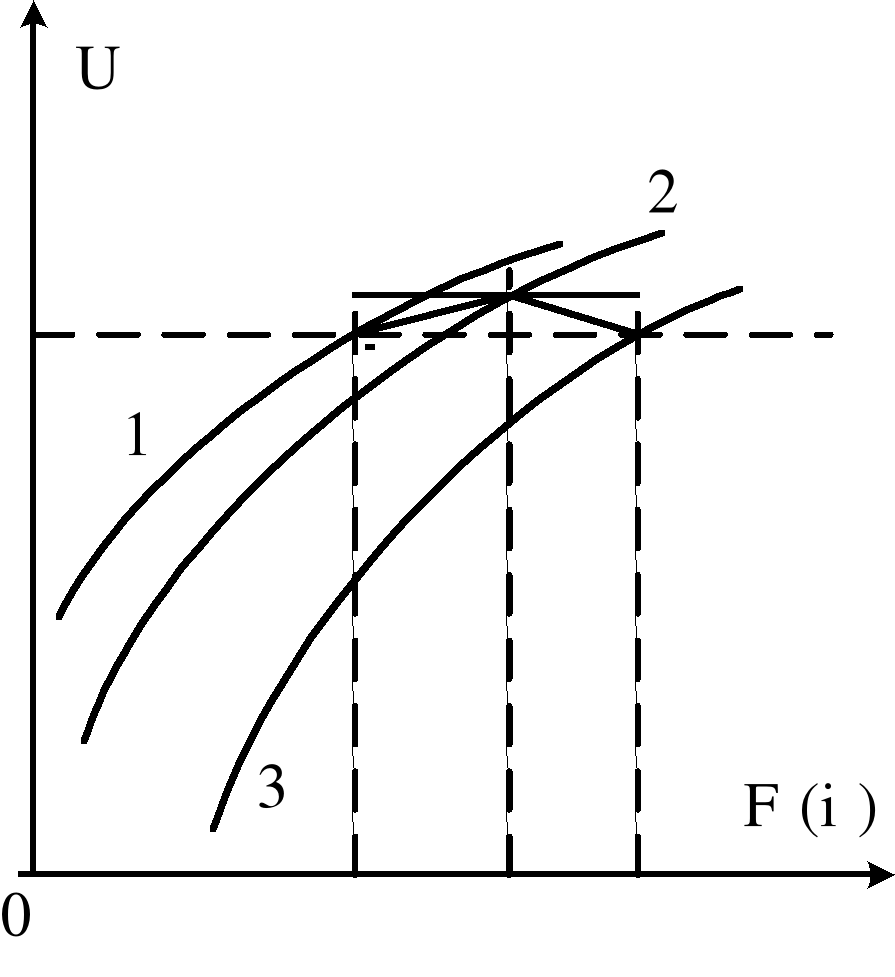
EMBED Visio.Drawing.11 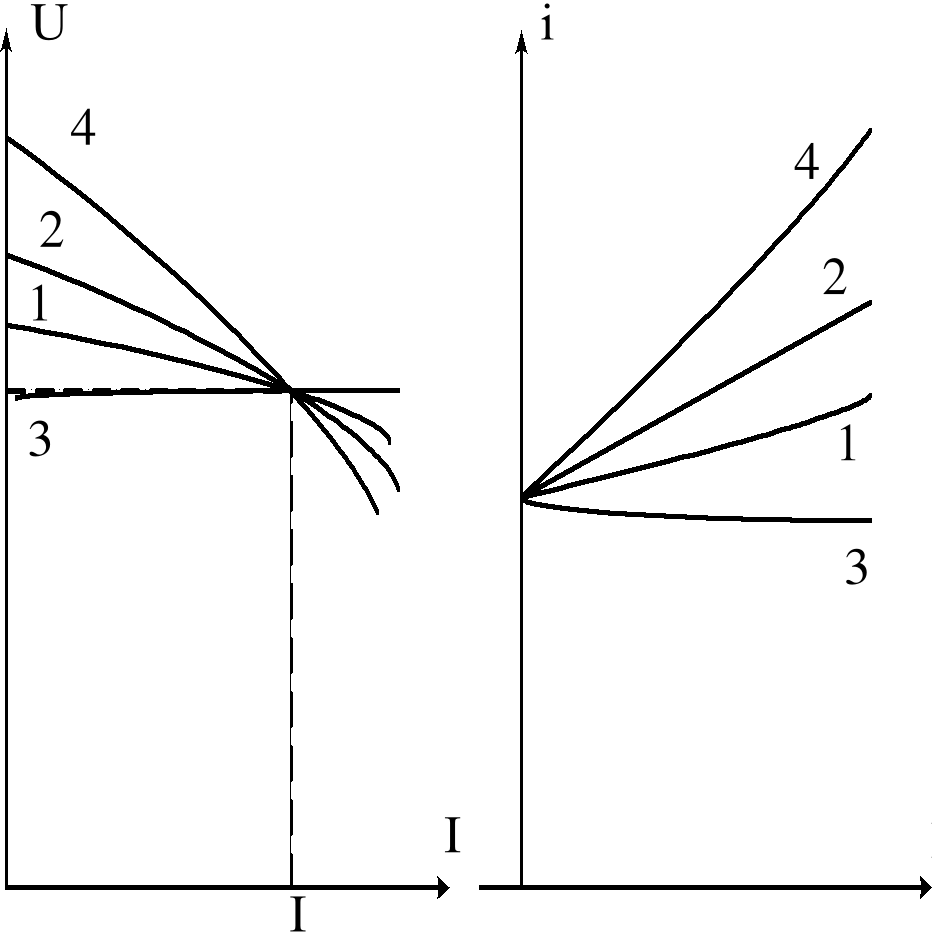
EMBED Visio.Drawing.11 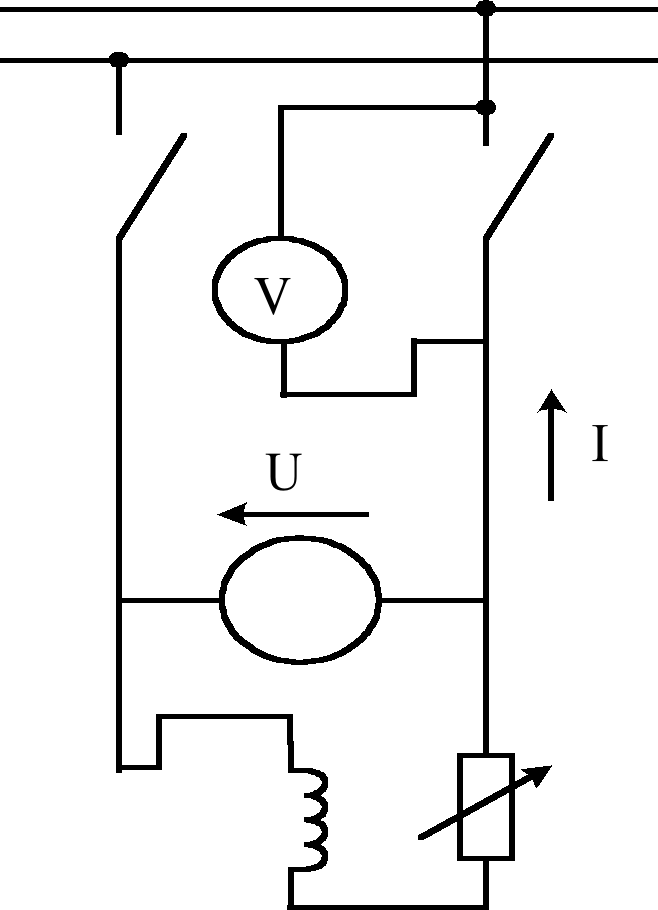
EMBED Visio.Drawing.11 
EMBED Visio.Drawing.11 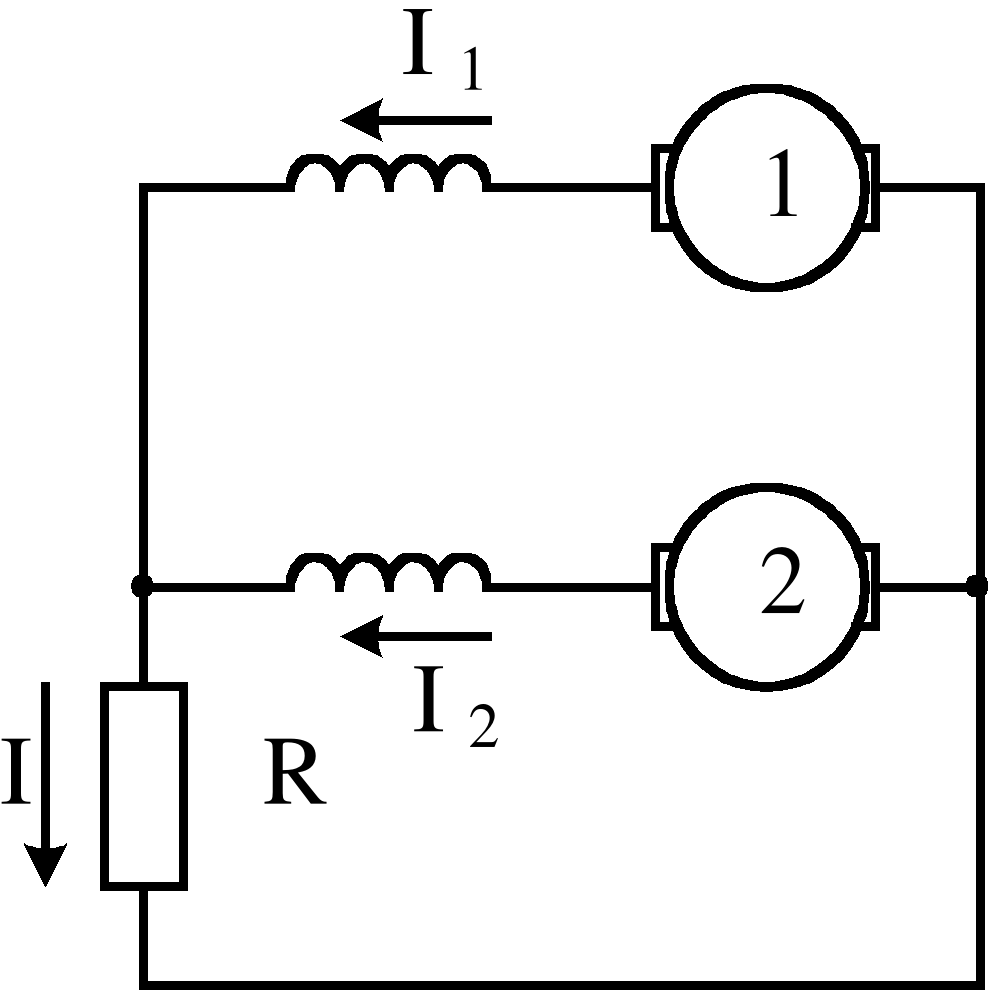
EMBED Visio.Drawing.11 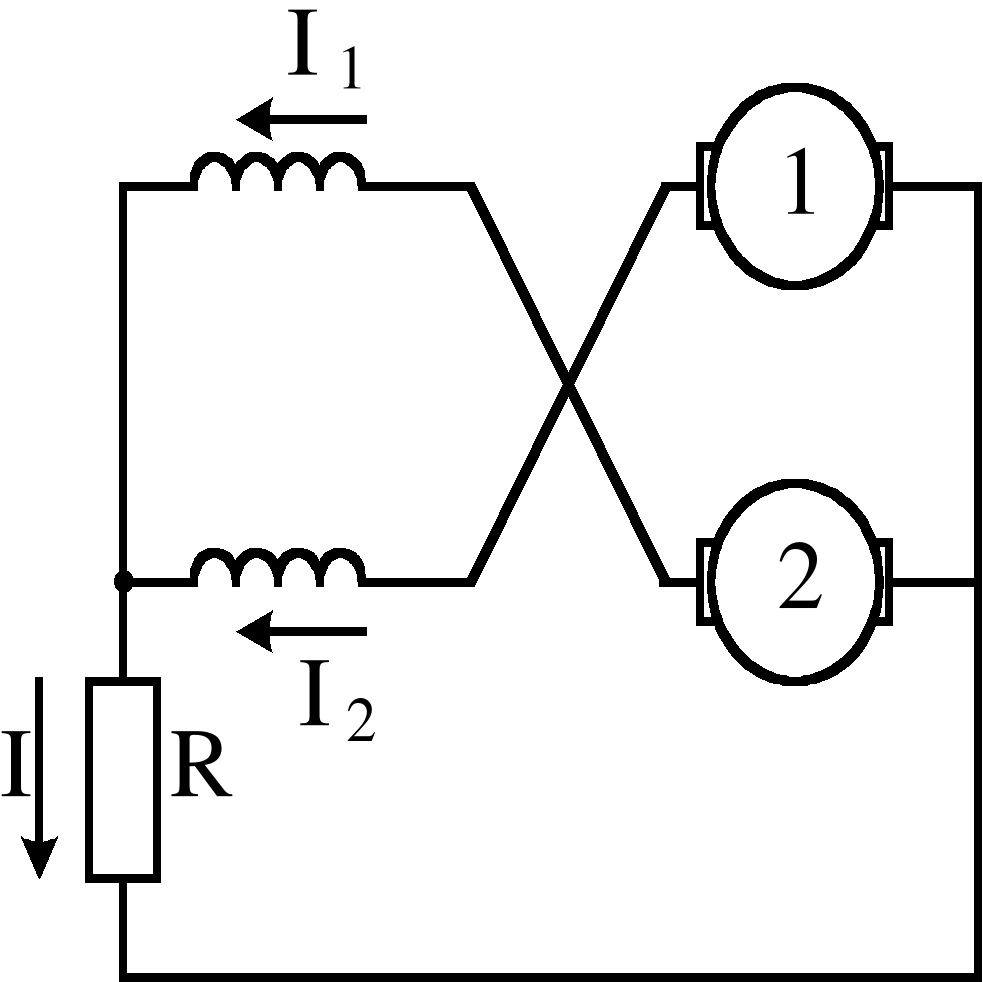
EMBED Visio.Drawing.11 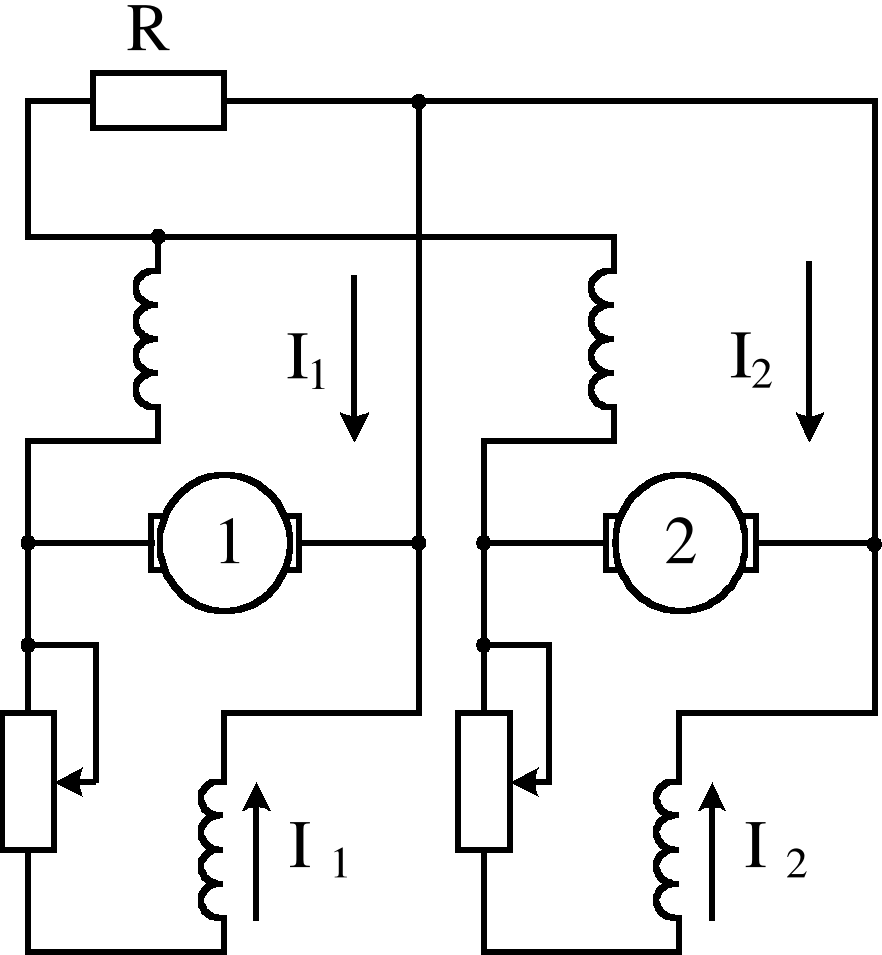
Рис. 4.34. Схема для ограничения перенапряжений при гашении поля
EMBED Visio.Drawing.11 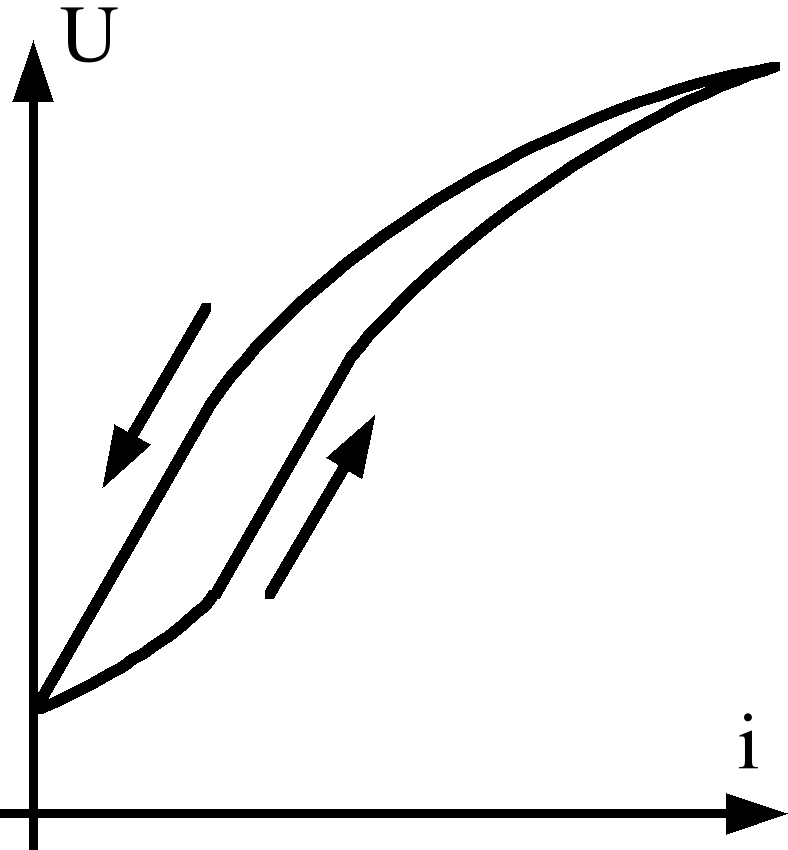
4.30.Определение тока нагрузки генератора по внешним характеристикам
Рис 4.32. Включение двух генераторов последовательного возбуждения на общую нагрузку
Рис 4.33. Включение двух генераторов последовательного возбуждения на общую нагрузку
1691
EMBED Visio.Drawing.11 
Рис.1.1. Схема генератора с независимым возбуждением
Исследование генератора постоянного тока