Динамический режим систем автоматического управления
Лекция 3. Динамический режим систем автоматического управления
3.1. Динамический режим САУ.
Уравнение динамики
Установившийся режим не является характерным для САУ. Обычно на управляемый процесс действуют различные возмущения, отклоняющие управляемый параметр от заданной величины. 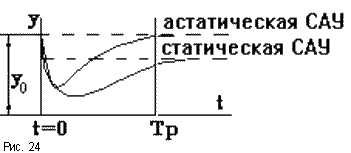
Процесс установления требуемого значения управляемой величины называется регулированием. Ввиду инерционности звеньев регулирование не может осуществляться мгновенно.
Рассмотрим САР, находящуюся в установившемся режиме, характеризующемся значением выходной величины y = yo. Пусть в момент t = 0 на объект воздействовал какой - либо возмущающий фактор, отклонив значение регулируемой величины. Через некоторое время регулятор вернет САР к первоначальному состоянию (с учетом статической точности) (рис.24). Если регулируемая величина изменяется во времени по апериодическому закону, то процесс регулирования называется апериодическим.
При резких возмущениях возможен колебательный затухающий процесс (рис.25а). Существует и такая вероятность, что после некоторого времени Тр в системе установятся незатухающие колебания регулируемой величины - незатухающий колебательный процесс (рис.25б). Последний вид - расходящийся колебательный процесс (рис.25в).
Таким образом, основным режимом работы САУ считается динамический режим, характеризующийся протеканием в ней переходных процессов. Поэтому второй основной задачей при разработке САУ является анализ динамических режимов работы САУ.
Поведение САУ или любого ее звена в динамических режимах описывается уравнением динамики y(t) = F(u,f,t), описывающее изменение величин во времени. Как правило, это дифференциальное уравнение или система дифференциальных уравнений. Поэтому основным методом исследования САУ в динамических режимах является метод решения дифференциальных уравнений. Порядок дифференциальных уравнений может быть довольно высоким, то есть зависимостью связаны как сами входные и выходные величины u(t), f(t), y(t), так и скорости их изменения, ускорения и т.д. Поэтому уравнение динамики в общем виде можно записать так:
F(y, y’, y”,..., y(n), u, u’, u”,..., u(m), f, f ’, f ”,..., f(k)) = 0.
3.2. Линеаризация уравнения динамики
В общем случае уравнение динамики оказывается нелинейным, так как реальные звенья САУ обычно нелинейны. В целях упрощения теории нелинейные уравнения заменяют линейными, которые приблизительно описывают динамические процессы в САУ. Получаемая при этом точность уравнений оказывается достаточной для технических задач. Процесс преобразования нелинейных уравнений в линейные называется линеаризацией уравнений динамики. Рассмотрим сначала геометрическое обоснование линеаризации.
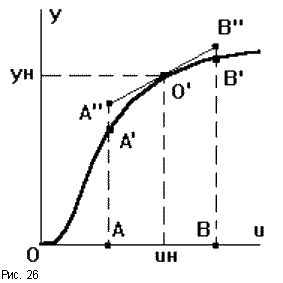
В нормально функционирующей САУ значение регулируемой и всех промежуточных величин незначительно отличается от требуемых. В пределах малых отклонений все нелинейные зависимости между величинами, входящими уравнение динамики, могут быть приближенно представлены отрезками прямых линий. Например, нелинейная статическая характеристика звена на участке АВ (рис.26) может быть представлена отрезком касательной в точке номинального режима А"В". Начало координат переносится в точку О’, и в уравнениях записываются не абсолютные значения величин y,u,f, а их отклонения от номинальных значений: y = y - yн, u = u - uн, f = f - fн. Это позволяет получить нулевые начальные условия, если считать, что при t 0 система находилась в номинальном режиме в состоянии покоя.
Математическое обоснование линеаризации состоит в том, что если известно значение f(a) какой - либо функции f(x) в любой точке x = a, а также значения производных от этой функции в данной точке f’(a), f”(a), ..., f(n)(a), то в любой другой достаточно близкой точке x + x значение функции можно определить, разложив ее в окрестности точки a в ряд Тейлора:
Аналогично можно разложить и функцию нескольких переменных. Для простоты возьмем упрощенный, но наиболее характерный вариант уравнения динамики САУ: F(y,y',y",u,u') = f. Здесь производные по времени u',y',y" также являются переменными. В точке, близкой к номинальному режиму: f = fн + f и F = Fн + F. Разложим функцию F в ряд Тейлора в окрестности точки номинального режима, отбрасывая члены ряда высоких порядков малости:
.
В номинальном режиме, когда все отклонения и их производные по времени равны нулю, получаем частное решение уравнения: Fн = fн. Учитывая это и вводя обозначения получим:
aoy” + a1y’ + a2y = bou’ + b1u + cof.
Отбрасывая все знаки , получим:
aoy” + a1y’ + a2y = bou’ + b1u + cof.
Отбрасывая все знаки , получим:
В более общем случае:
aoy(n) + a1y(n-1) + ... + an - 1y’ + any = bou(m) + ... + bm - 1u’ + bmu + cof.
При этом всегда нужно помнить, что в данном уравнении используются не абсолютные значения величин y, u, f их производных по времени, а отклонения этих величин от номинальных значений. Поэтому полученное уравнение будем называть уравнением в отклонениях.
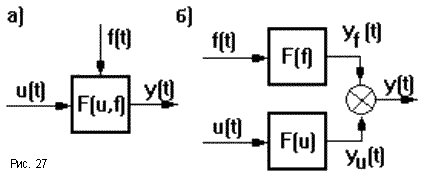
К линеаризованной САУ можно применить принцип суперпозиции: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис.27). Поэтому в дальнейшем мы ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:
aoy(n) + a1y(n-1) + ... + an - 1y’ + any = bou(m) + ... + bm - 1u’ + bmu.
Это уравнение описывает САУ в динамическом режиме лишь приближенно с той точностью, которую дает линеаризация. Однако следует помнить, что линеаризация возможна только при достаточно малых отклонениях величин и при отсутствии разрывов в функции F в окрестностях интересующей нас точки, которые могут быть созданы различными выключателями, реле и т.п.
Обычно n m, так как при n < m САУ технически нереализуемы.
3.3. Передаточная функция
В ТАУ часто используют операторную форму записи дифференциальных уравнений. При этом вводится понятие дифференциального оператора p = d/dt так, что, dy/dt = py, а pn = dn/dtn. Это лишь другое обозначение операции дифференцирования. Обратная дифференцированию операция интегрирования записывается как 1/p. В операторной форме исходное дифференциальное уравнение записывается как алгебраическое:
aop(n)y + a1p(n-1)y + ... + any = (aop(n) + a1p(n-1) + ... + an)y = (bop(m) + b1p(m-1) + ... + bm)u
Не надо путать эту форму записи с операционным исчислением хотя бы потому, что здесь используются непосредственно функции времени y(t), u(t) (оригиналы), а не их изображения Y(p), U(p), получаемые из оригиналов по формуле преобразования Лапласа. Вместе с тем при нулевых начальных условиях с точностью до обозначений записи действительно очень похожи. Это сходство лежит в природе дифференциальных уравнений. Поэтому некоторые правила операционного исчисления применимы к операторной форме записи уравнения динамики. Так оператор p можно рассматривать в качестве сомножителя без права перестановки, то есть pyyp. Его можно выносить за скобки и т.п.
Поэтому уравнение динамики можно записать также в виде:
Дифференциальный оператор W(p) называют передаточной функцией. Она определяет отношение выходной величины звена к входной в каждый момент времени: W(p) = y(t)/u(t), поэтому ее еще называют динамическим коэффициентом усиления. В установившемся режиме d/dt = 0, то есть p = 0, поэтому передаточная функция превращается в коэффициент передачи звена K = bm/an.
Знаменатель передаточной функции D(p) = aopn + a1pn - 1 + a2pn - 2 + ... + an называют характеристическим полиномом. Его корни, то есть значения p, при которых знаменатель D(p) обращается в ноль, а W(p) стремится к бесконечности, называются полюсами передаточной функции.
Числитель K(p) = bopm + b1pm - 1+ ... + bm называют операторным коэффициентом передачи. Его корни, при которых K(p) = 0 и W(p) = 0, называются нулями передаточной функции.
Звено САУ с известной передаточной функцией называется динамическим звеном. Оно изображается прямоугольником, внутри которого записывается выражение передаточной функции. То есть это обычное функциональное звено, функция которого задана математической зависимостью выходной величины от входной в динамическом режиме. Для звена с двумя входами и одним выходом должны быть записаны две передаточные функции по каждому из входов. Передаточная функция является основной характеристикой звена в динамическом режиме, из которой можно получить все остальные характеристики. Она определяется только параметрами системы и не зависит от входных и выходных величин. Например, одним из динамических звеньев является интегратор. Его передаточная функция Wи(p) = 1/p. Схема САУ, составленная из динамических звеньев, называется структурной.
3.4. Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо от исполнения может быть описана одинаковыми по форме дифференциальными уравнениями не более второго порядка. Такие элементы называют элементарными динамическими звеньями. Передаточная функция элементарного звена в общем виде задается отношением двух полиномов не более чем второй степени:
Wэ(p) = .
Известно также, что любой полином произвольного порядка можно разложить на простые сомножители не более, чем второго порядка. Так по теореме Виета можно записать
D(p) = aopn + a1pn - 1 + a2pn - 2 + ... + an = ao(p - p1)(p - p2)...(p - pn),
где p1, p2, ..., pn - корни полинома D(p). Аналогично
K(p) = bopm + b1pm - 1+ ... + bm = bo(p - p~1)(p - p~2)...(p - p~m),
где p~1, p~2, ..., p~m - корни полинома K(p). То есть
Корни любого полинома могут быть либо вещественными pi = ai , либо комплексными попарно сопряженными pi = ai ± ji . Любому вещественному корню при разложении полинома соответствует сомножитель (p - ai ). Любая пара комплексно сопряженных корней соответствует полиному второй степени, так как
(p - ai + ji )(p - ai - ji ) = (p - ai)2 + i 2 = p2 - 2pai + (ai 2 + i 2).
То есть
Поэтому любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных функций элементарных звеньев. Каждому такому звену в реальной САУ, как правило, соответствует какой - то отдельный узел. Зная свойства отдельных звеньев можно судить о динамики САУ в целом.
В теории удобно ограничиться рассмотрением типовых звеньев, передаточные функции которых имеют числитель или знаменатель, равный единице, то есть W(p) = , W(p) = , W(p) = 1/p, W(p) = p, W(p) = Tp + 1, W(p) = k. Из них могут быть образованы все остальные звенья. Звенья, у которых порядок полинома числителя больше порядка полинома знаменателя, технически нереализуемы.
Вопросы
- Какой режим САУ называется динамическим?
- Что называется регулированием?
- Назовите возможные виды переходных процессов в САУ. Какие из них являются допустимыми для нормальной работы САУ?
- Что называется уравнением динамики? Каков его вид?
- Как провести теоретическое исследование динамики САУ?
- Что называется линеаризацией?
- В чем геометрический смысл линеаризации?
- В чем состоит математическое обоснование линеаризации?
- Почему уравнение динамики САУ называется уравнением в отклонениях?
- Справедлив ли для уравнения динамики САУ принцип суперпозиции? Почему?
- Как звено с двумя и более входами представить схемой, состоящей из звеньев с одним входом?
- Запишите линеаризованное уравнение динамики в обычной и в операторной формах?
- В чем смысл и какими свойствами обладает дифференциальный оператор p?
- Что называется передаточной функцией звена?
- Запишите линеаризованное уравнение динамики с использованием передаточной функции. Справедлива ли эта запись при ненулевых начальных условиях? Почему?
- Напишите выражение для передаточной функции звена по известному линеаризованному уравнению динамики: (0.1p + 1)py(t) = 100u(t).
- Что называется динамическим коэффициентом усиления звена?
- Что называется характеристическим полиномом звена?
- Что называется нулями и полюсами передаточной функции?
- Что называется динамическим звеном?
- Что называется структурной схемой САУ?
- Что называется элементарными и типовыми динамическими звеньями?
- Как сложную передаточную функцию разложить на передаточные функции типовых звеньев?
Лекция 4. Структурные схемы САУ
4.1. Эквивалентные преобразования структурных схем
Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Но несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем. Рассмотрим возможные способы преобразований.
1. Последовательное соединение (рис.28) - выходная величина предшествующего звена подается на вход последующего. При этом можно записать:
y1 = W1yo; y2 = W2y1; ...; yn = Wnyn - 1 = >
yn = W1W2.....Wn.yo = Wэквyo,
где.
То есть цепочка последовательно соединенных звеньев преобразуется в эквивалентное звено с передаточной функцией, равной произведению передаточных функций отдельных звеньев.
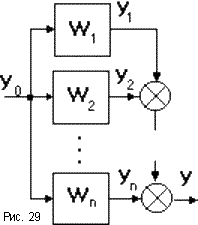
2. Параллельно - согласное соединение (рис.29) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются. Тогда:
y = y1 + y2 + ... + yn = (W1 + W2 + ... + W3)yo = Wэквyo,
где .
То есть цепочка звеньев, соединенных параллельно - согласно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.
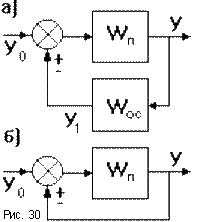
3. Параллельно - встречное соединение (рис. 30а) - звено охвачено положительной или отрицательной обратной связью. Участок цепи, по которому сигнал идет в противоположном направлении по отношению к системе в целом (то есть с выхода на вход) называется цепью обратной связи с передаточной функцией Wос. При этом для отрицательной ОС:
y = Wпu; y1 = Wосy; u = yo - y1,
следовательно
y = Wпyo - Wпy1 = Wпyo - WпWocy = >
y(1 + WпWoc) = Wпyo = > y = Wэквyo,
где .
Аналогично: - для положительной ОС.
Если Woc = 1, то обратная связь называется единичной (рис.30б), тогда Wэкв = Wп /(1 ± Wп).
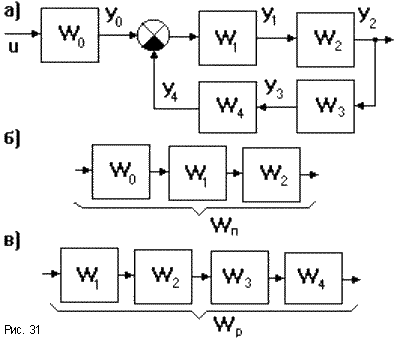
Замкнутую систему называют одноконтурной, если при ее размыкании в какой либо точке получают цепочку из последовательно соединенных элементов (рис.31а). Участок цепи, состоящий из последовательно соединенных звеньев, соединяющий точку приложения входного сигнала с точкой съема выходного сигнала называется прямой цепью (рис.31б, передаточная функция прямой цепи Wп = WoW1W2). Цепь из последовательно соединенных звеньев, входящих в замкнутый контур называют разомкнутой цепью (рис.46в, передаточная функция разомкнутой цепи Wp = W1W2W3W4). Исходя из приведенных выше способов эквивалентного преобразования структурных схем, одноконтурная система может быть представлена одним звеном с передаточной функцией: Wэкв = Wп/(1 ± Wp) - передаточная функция одноконтурной замкнутой системы с отрицательной ОС равна передаточной функции прямой цепи, деленной на единицу плюс передаточная функция разомкнутой цепи. Для положительной ОС в знаменателе знак минус. Если сменить точку снятия выходного сигнала, то меняется вид прямой цепи. Так, если считать выходным сигнал y1 на выходе звена W1, то Wp = WoW1. Выражение для передаточной функции разомкнутой цепи не зависит от точки снятия выходного сигнала.
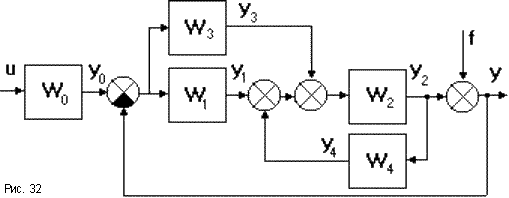
Замкнутые системы бывают одноконтурными и многоконтурной (рис.32).Чтобы найти эквивалентную передаточную функцию для данной схемы нужно сначала осуществить преобразование отдельных участков.
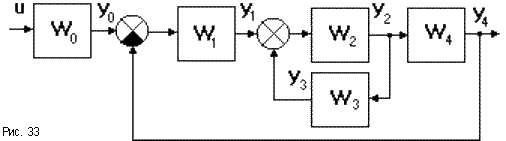
Если многоконтурная система имеет перекрещивающиеся связи (рис.33), то для вычисления эквивалентной передаточной функции нужны дополнительные правила:
4. При переносе сумматора через звено по ходу сигнала необходимо добавить звено с передаточной функцией того звена, через которое переносится сумматор. Если сумматор переносится против хода сигнала, то добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим сумматор (рис.34).
Так с выхода системы на рис.34а снимается сигнал
y2 = (f + yoW1)W2.
Такой же сигнал должен сниматься с выходов систем на рис.34б:
y2 = fW2 + yoW1W2 = (f + yoW1)W2,
и на рис.34в:
y2 = (f(1/W1) + yo)W1W2 = (f + yoW1)W2.
При подобных преобразованиях могут возникать неэквивалентные участки линии связи (на рисунках они заштрихованы).
5. При переносе узла через звено по ходу сигнала добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим узел. Если узел переносится против хода сигнала, то добавляется звено с передаточной функцией звена, через которое переносится узел (рис.35). Так с выхода системы на рис.35а снимается сигнал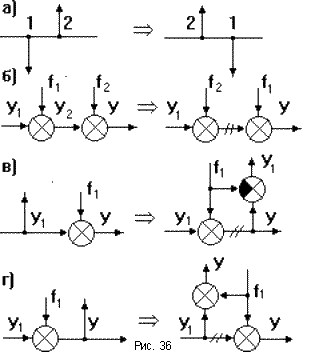
y1 = yoW1.
Такой же сигнал снимается с выходов рис.35б:
y1 = yoW1W2/W2 = yoW1
и рис.35в:
y1 = yoW1.
6. Возможны взаимные перестановки узлов и сумматоров: узлы можно менять местами (рис. 36а); сумматоры тоже можно менять местами (рис.36б); при переносе узла через сумматор необходимо добавить сравнивающий элемент (рис.36в: y = y1 + f1 = > y1 = y - f1) или сумматор (рис.36г: y = y1 + f1).
Во всех случаях переноса элементов структурной схемы возникают неэквивалентные участки линии связи, поэтому надо быть осторожным в местах съема выходного сигнала.
При эквивалентных преобразованиях одной и той же структурной схемы могут быть получены различные передаточные функции системы по разным входам и выходам. Так на рис.48 имеется два входа: по управляющему воздействию u и возмущению f при одном выходе y. Такая схема может быть преобразована к одному звену с двумя передаточными функциями Wuy и Wfy.
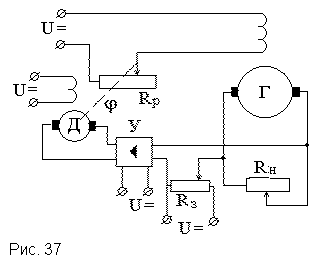
4.2. САР напряжения генератора постоянного тока
Для примера рассмотрим схему САР напряжения генератора постоянного тока (рис.37).
Выведем дифференциальное уравнение исполнительного двигателя постоянного тока. Его схема замещения изображена на рис. 38.
Для якорной цепи справедливо уравнение
.
Если принять, что , гдеj – угол поворота вала двигателя, то
,
то есть
,
где – постоянная времени якорной цепи; , – коэффициенты пропорциональности.
Если учесть, что , где J – момент инерции якоря, M - электромагнитный момент, Мс – момент сторонних сил, то получим
.
Следовательно
= >
= >
= >
= >
= >
.
Здесь – электромеханическая постоянная времени;
; ; ; – коэффициенты пропорциональности;
, – передаточные функции по напряжению и моменту сторонних сил.
Структурная схема двигателя постоянного тока показана на рис.39.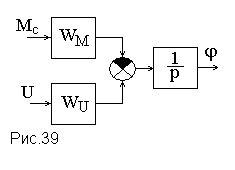
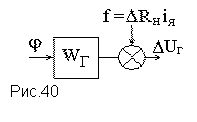
Аналогичным образом выводится передаточная функция генератора постоянного тока, которая с учетом пренебрежения индуктивностью обмотки якоря имеет вид, показанный на рис.40, где
.
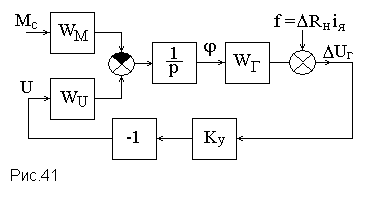
Усилитель можно представить пропорциональным звеном с коэффициентом усиления Kу. В окончательном виде структурная схема САР напряжения генератора постоянного тока показана на рис.41.
Вопросы
- Перечислите типичные схемы соединения звеньев САУ?
- Как преобразовать цепь последовательно соединенных звеньев к одному звену?
- Как преобразовать цепь параллельно соединенных звеньев к одному звену?
- Как преобразовать обратную связь к одному звену?
- Что называется прямой цепью САУ?
- Что называется разомкнутой цепью САУ?
- Как перенести сумматор через звено по ходу и против движения сигнала?
- Как перенести узел через звено по ходу и против движения сигнала?
- Как перенести узел через узел по ходу и против движения сигнала?
- Как перенести сумматор через сумматор по ходу и против движения сигнала?
- Как перенести узел через сумматор и сумматор через узел по ходу и против движения сигнала?
- Что называется неэквивалентными участками линий связи в структурных схемах?
- Каково назначение САР напряжения генератора постоянного тока?
Динамический режим систем автоматического управления