АНАЛІТИЧНІ МЕТОДИ КІНЕМАТИЧНОГО ДОСЛІДЖЕННЯ МЕХАНІЗМІВ
ЛЕКЦІЯ N10
АНАЛІТИЧНІ МЕТОДИ КІНЕМАТИЧНОГО ДОСЛІДЖЕННЯ МЕХАНІЗМІВ
- АНАЛОГИ ШВИДКОСТЕЙ І ПРИСКОРЕНЬ
Аналітичне дослідження кінематики механізмів зручно вести з використанням аналогів швидкостей і прискорень. Це пояснюється тим, що для заданої кінематичної схеми механізму аналоги швидкостей і прискорень залежать тільки від узагальненої координати і не залежать від швидкості руху початкової ланки. Важливо зазначити, що аналоги швидкостей і прискорень дають змогу легко порівнювати закони руху ланок, а звідси й вибрати оптимальний варіант механізму для забезпечення заданих умов роботи.
Якщо кут повороту якої-небудь k-ї ланки задано як функція
(1)
де - кут повороту початкової ланки, то кутова швидкість k цієї ланки може бути представлена так:
(2)
де, - кутова швидкість початкової ланки [ ];
- безрозмірна кутова швидкість ланки (аналог кутової швидкості) чи передатна функція кутової швидкості.
Отже, дійсна кутова швидкість k дорівнює добутку кутової швидкості початкової ланки на аналог кутової швидкості ланки к.
Диференціюючи рівняння (2) за часом t маємо величину кутового прискорення ланки к:
(3)
де - аналог (передатна функція) кутового прискорення.
Аналогічно можуть бути отримані рівняння для швидкості і прискорення якої-небудь точки ланки k.
Нехай rm є радіус-вектор, який визначає положення точки m. Тоді швидкість точки m
, (4)
де, - аналог швидкості точки m (має розмірність одиниць довжини).
Таким чином, дійсна швидкість точки m дорівнює добутку кутової швидкості початкової ланки на аналог швидкості точки m.
Диференціюючи вираз (4) за часом маємо величину прискорення а точки m:
де, - аналог прискорення точки m (має розмірність одиниці довжини). Рух початкової ланки механізму при a = const називається перманентним чи основним рухом механізму. При цьому = 0, тоді: ; (10)
; (11)
; (12)
. (13)
Якщо в рівностях (2 - 5) прийняти кутову швидкість =0, то кутові і лінійні швидкості ланок також дорівнюють нулю, а кутові і лінійні прискорення визначаємо за формулами:
(14)
(15)
Рух ланки, описаний рівняннями (10), (11) називається початковим.
2. АНАЛІТИЧНЕ ДОСЛІДЖЕННЯ КІНЕМАТИКИ ЧОТИРИЛАНКОВОГО МЕХАНІЗМУ З ДВОПОВОДКОВОЮ СТРУКТУРНОЮ ГРУПОЮ II КЛАСУ 2 ПОРЯДКУ 1 ВИДУ
Розглянемо схему кривошипно-коромислового механізму.
Механізм може мати 2 схеми зібрання (рис.1, а, б) і утворюється вхідною ланкою АВ і структурною групою першого виду з трьома обертальними кінематичними парами В,С,D.
Рівняння замкненого векторного контуру, що утворений ланками механізму, має такий вигляд:
. (16)
Проектуючи рівняння (4.1) на осі нерухомої системи координат ОХУ і враховуючи, що , маємо:
; (17)
.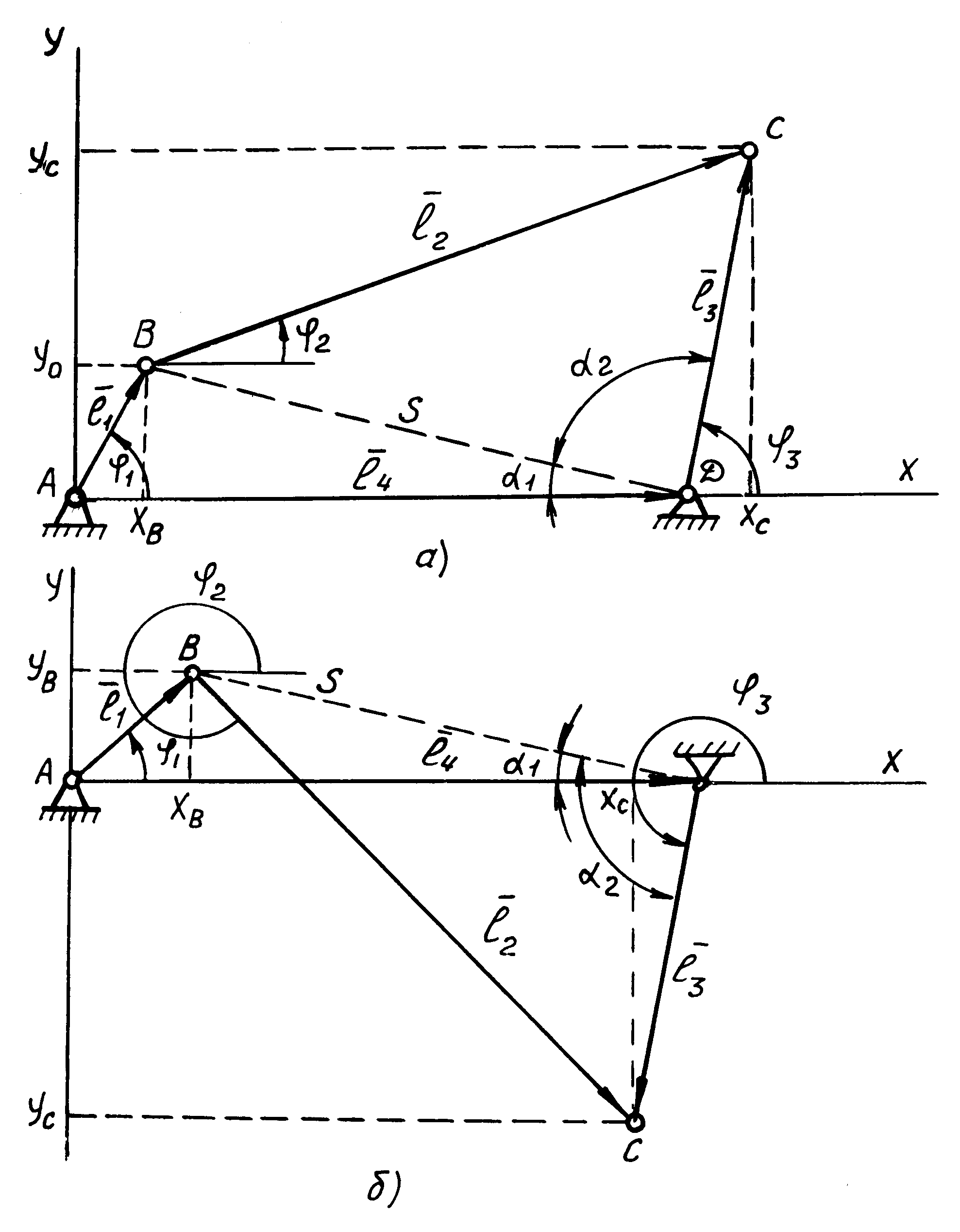
Рис.4.1 Схема кривошипно-коромислового механізму.
Координати точки В:
; (18)
. (19)
Задачу визначення положень механізму розв’язуємо поділом замкненого контуру АВСD на 2 трикутники: АВD і ВСD.
Розглянемо АВD і ВСD для яких будуть справедливими такі залежності:
;
;
1= (20)
;
;
;
S = (21)
Напівпериметр ВСD:
. (22)
Радіус кола вписаного в ВСD:
. (23)
Допоміжний кут:
.
Кутова координата ланки DС:
, для схеми (рис. 4.1 а); (24)
, для схеми (рис. 4.1 б), (25)
тоді координати точки С:
; (26)
. (27)
Кут 2 визначаємо через координати точок С і В:
(сх. 1);
(сх. 1,2);
2 = (сх. 2); (28)
(сх. 2);
(сх. 2).
Для визначення аналогів швидкостей продиференціюємо систему (17) по узагальненій координаті 1:
; (29)
.
Позначимо: ,
де, - аналоги кутових швидкостей відповідно 2 і 3 ланок, тоді систему (4.14) запишемо у такому вигляді:
; (30)
. (31)
Від кутів, які входять у рівняння (4.15) віднімаємо спільний кут 2 , що рівнозначно повороту системи координат ХАY на кут 2:
, (32)
звідки:
. (33)
Після аналогічного перетворення рівняння (30) поворотом координатних осей на кут 3 маємо:
, (34)
звідки:
. (35)
Для аналогів кутової швидкості можна записати:
; (36)
, (37)
тоді кутові швидкості другої і третьої ланок:
; (38)
. (39)
Лінійні швидкості точок:
; (40)
. (41)
Для визначення кутових прискорень ланок 2 і 3 диференціюємо систему (30-31) по узагальненій координаті 1:
; (42)
, (43)
де - аналоги кутових прискорень, які визначимо, якщо виконати перетворення координат послідовним поворотом їх осей на кути -2, -3.
(44)
. (45)
Кутові прискорення ланок:
; (46)
, (47)
де - задані кутова швидкість і кутове прискорення початкової ланки .
Прискорення точки С визначимо за формулою:
. (48)
3. ЧОТИРИЛАНКОВИЙ МЕХАНІЗМ З ДВОПОВОДКОВОЮ СТРУКТУРНОЮ ГРУПОЮ ДРУГОГО ВИДУ( КРИВОШИПНО-ПОВЗУННИЙ МЕХАНІЗМ)
Механізм (рис. 9.3.).складається з початкової ланки 1 (кривошип) і двоповoдкової структурної групи 2 виду, яка включає ланки 2 (шатун) і 3 (повзун).
Рівняння замкненого векторного контуру механізму:
. (49)
Проектуючи рівняння (4.34) на осі координат, отримуємо систему алгебраїчних рівнянь:
; (50)
.
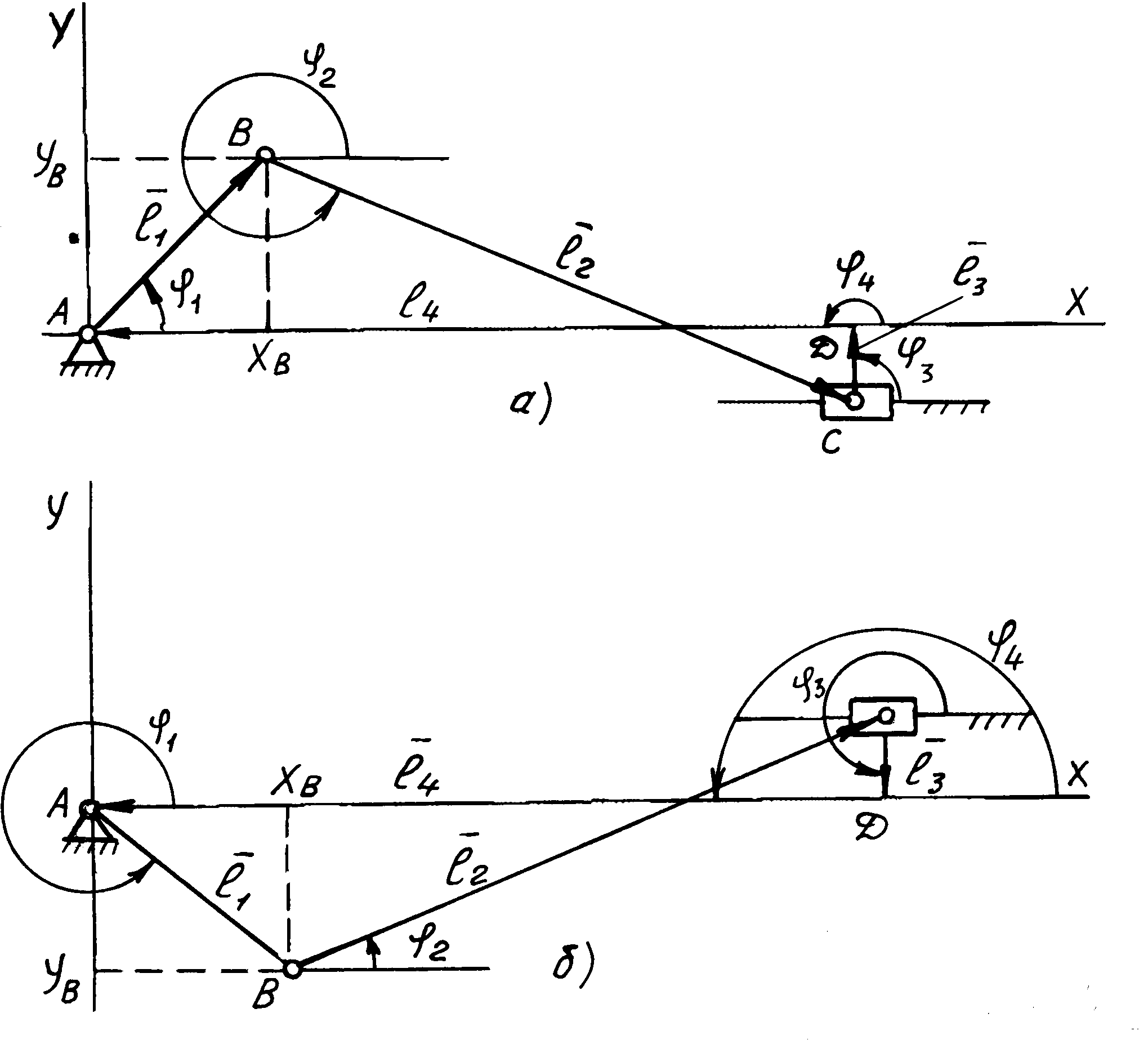
Рис. 9.3. Схема кривошипно-повзунного механізму.
Кути 1 вимірюються від позитивного напрямку осі АХ до позитивного напрямку відповідного вектора проти годинникової стрілки.
Для схеми (рис. 4.3,а) 3 = 90, 4 = 180; для схеми (рис. 4.3,б) 3 = 270,
4 = 180, тоді система рівнянь (51) матиме вигляд:
;
. (51)
Координати точки В:
; (52)
.
Для визначення координат точки С попередньо запишемо значення кута 2:
, (53)
тоді:
; (54)
.
Для визначення швидкостей, кутової ланки 2, та лінійної точки С диференціюємо систему рівнянь (51) по узагальненій координаті 1:
; (55)
.
Позначимо: ,
де - аналоги кутової та лінійної швидкостей відповідно 2 та 3 ланок. Тоді система (55) матиме вигляд:
; (56)
. (57)
З рівняння (57) визначаємо:
, (58)
а з рівняння (56):
. (59)
Аналогічно залежностям (36, 37) маємо:
; (60)
.
Тоді кутова швидкість другої ланки
. (61)
Лінійна швидкість точки С третьої ланки:
. (62)
Для визначення лінійного прискорення точки С і кутового прискорення другої ланки продиференціюємо рівняння (56, 57) по узагальненій координаті 1:
(63)
Позначимо і перепишемо систему (4.48):
; (64)
(65)
З рівняння (4.50) визначаємо :
, (66)
. (67)
Аналогічно залежностям (4.31, 4.33) кутове прискорення другої ланки:
. (68)
Лінійне прискорення точки С другої ланки:
. (69)
4. КУЛІСНИЙ МЕХАНІЗМ
Кулісний механізм (рис. 4.5) складається з вхідної ланки 1, яка утворює обертальну кінематичну пару з кулісним каменем 2. Кулісний камінь утворює поступальну кінематичну пару з кулісою 3. Вхідна ланка 1 і куліса 3 з’єднані зі стояком обертальними кінематичними парами А, С.
Розглянемо кулісний механізм у вигляді замкненого векторного контуру АВС, вектори якого утворені ланками 1, 2, 3.
Рівняння замкненого векторного контуру:
. (70)
Cпроектувавши рівняння (4.55) на координатні осі YСХ, одержуємо систему алгебраїчних рівнянь:
; (71)
. (72)
Для визначення напрямного кута 3 розділимо рівняння (72) на (71), тоді маємо:
. (73)
Визначимо довжину третьої ланки (куліси):
. (74)
Для визначення швидкостей ланок механізму диференціюємо систему (71-72) по узагальненій координаті 1:
; (75)
. (76)
Позначимо ,
де - аналог швидкості точки B3 відносно В2;
- аналог кутової швидкості ланки 3.
Рис. 4.5. Схема кулісного механізму.
Для визначення аналогів швидкостей від кутів, які входять в рівняння (75, 76) віднімаємо кут 3, що еквівалентно повороту системи координат на такий самий кут:
;
.
Аналогічно залежностям (62, 63) маємо:
(77)
(78)
Для визначення аналогів кутових і лінійних прискорень ланок і точок механізму рівняння (75, 76), з урахуванням прийнятих позначень, диференціюємо по узагальненій координаті 1:
(79)
(80)
де, - аналог кутового прискорення ланки 3;
- аналог лінійного прискорення точки B3 відносно B2.
Віднімаємо від кутів, які входять в рівняння (79, 80) загальний кут 3:
; (81)
, (82)
звідки:
;
.
Аналогічно залежності (69) визначаємо відносне (релятивне) прискорення :
. (83)
Прискорення Коріоліса визначаємо за формулою:
. (84)
Кутове прискорення третьої ланки визначимо з рівняння (82):
. (85)
Тоді лінійне прискорення точки В3 визначимо аналогічно (48):
(86)
PAGE 3
EMBED Equation.3
EMBED Equation.3
EMBED Equation.3
EMBED Equation.3
(5)
EMBED Equation.3 
АНАЛІТИЧНІ МЕТОДИ КІНЕМАТИЧНОГО ДОСЛІДЖЕННЯ МЕХАНІЗМІВ