Теорія механізмів і машин (ТММ)
ЛЕКЦІЯ №1.
ВСТУП
Теорія механізмів і машин (ТММ) — наука про загальні методи дослідження властивостей механізмів і машин та проектування їхніх схем.
МЕХАНІЗМ: система тіл, призначена для перетворення руху одного чи декількох тіл у необхідні рухи інших тіл.
МАШИНА: пристрій який виконує механічні рухи для перетворення енергії, матеріалів і інформації з метою заміни фізичної чи розумової праці людини.
1.2. РОЛЬ МАШИНОБУДУВАННЯ В ЗДІЙСНЕННІ НАУКОВО-ТЕХНІЧНОГО ПРОГРЕСУ ТА ОСНОВНІ ЗАДАЧІ
Машинобудування - провідна галузь народного господарства, що виробляє машини, механізми та устаткування для цілого ряду галузей.
Від рівня розвитку машинобудування, ступеня досконалості машин, в значній мірі залежить продуктивність суспільної праці і добробут народу.
Задачі перед машинобудуванням стоять дуже складні. Машина повинна бути міцна, надійна в роботі, високопродуктивна, але разом з цим і легка, з мінімальною матеріалоємністю й енерговитратами, не повинна забруднювати навколишнє середовище, відповідати вимогам технічної естетики й ергономіки. Вибір кінематичної схеми (кістяк машини) - перший і основний етап проектування. Вибір розмірів і матеріалів - наступний етап проектування. Вибір методів і засобів виготовлення - завершальний етап. Отже два наступних етапи базуються на першому - визначальному.
Аналіз багатоланкових механізмів, розв’язування задач оптимального синтезу став можливий з використанням електронних обчислювальних машин (ЕОМ), а це вимагає розробки відповідних алгоритмів і програм.
Майже всі галузі промисловості мають потребу в надійних механізмах з безступінчастою зміною передатного відношення. Повинна одержати розвиток теорія механізмів, що здійснюють рухи з зупинками, типу мальтійських, храпових, підоймових і т.д.
Підвищення робочих швидкостей машин призвело збільшення динамічних навантажень на ланки механізмів, до підвищення рівня вібрацій, породжуваного вібрацією шуму, тому проблеми віброзахисту машин і зниження рівня шуму є актуальними, і вивчаються в курсі ТММ.
Подальший розвиток повинна одержати теорія просторових механізмів, які знаходять широке застосування в робототехніці.
Особливого значення набувають експериментальні дослідження машин і механізмів з застосуванням ЕОМ.
1.3. ПРОБЛЕМИ, ЩО ВИМАГАЮТЬ ВИРІШЕННЯ
ПРОБЛЕМИ ТММ можуть бути розподілені на дві групи:
1.3.1. Група проблем, присвячена дослідженню структурних, кінематичних і динамічних властивостей механізмів, тобто АНАЛІЗУ механізмів.
1.3.2. Група проблем, присвячена проектуванню механізмів із заданими структурними, кінематичними і динамічними властивостями, тобто СИНТЕЗУ механізмів.
СТРУКТУРНИЙ і КІНЕМАТИЧНИЙ аналізи мають своєю метою вивчення теорії побудови механізмів, дослідження руху з геометричної точки зору, незалежно від сил, завдяки яким виник цей рух.
ДИНАМІЧНИЙ аналіз механізмів має своєю метою вивчення методів визначення зусиль у тілах, що утворюють механізм, під час руху.
1.4. ЗМІСТ ДИСЦИПЛІНИ ТММ ТА ЇЇ ЗНАЧЕННЯ ДЛЯ ІНЖЕНЕРНОЇ ОСВІТИ. ЗВ’ЯЗОК ТММ З ІНШИМИ ГАЛУЗЯМИ ЗНАНЬ
ТММ розглядає будову і класифікацію механізмів, методи кінематичного та динамічного дослідження, проектування їхніх схем, які є загальними для механізмів і машин різного призначення. Ці знання необхідні інженерам-механікам для створення сучасних машин.
У ТММ обґрунтовується вибір оптимальних параметрів машин і механізмів, визначаються методи їхнього раціонального проектування.
Основні якості нової машини або механізму закладаються на першій стадії їхнього проектування, коли тільки вибирають структурну (принципову) схему й головні кінематичні параметри. Тому доцільніше боротися з першопричинами шкідливих явищ, ніж з їхніми наслідками.
Базою ТММ є курси математики, фізики, хімії, теоретичної механіки, електротехніки, електроніки, вміння використовувати в інженерних розрахунках ЕОМ.
1.5. ДЕЯКІ ВІДОМОСТІ З ІСТОРІЇ РОЗВИТКУ НАУКИ ПРО МЕХАНІЗМИ ТА МАШИНИ. РОЛЬ ВІТЧИЗНЯНИХ ВЧЕНИХ В СТВОРЕННІ НАУКОВИХ ШКІЛ
Найстародавніша праця про механізми і машини, яка дійшла до нашого часу, — це "Механічні проблеми" Арістотеля (384—322 до н. е.), де описано важіль, криничний журавель, кривошип, колесо, коток, поліспаст, гончарний верстат, центрифуги, зубчасті колеса та ваги.
Значна роль у створенні машин відводиться видатному давньогрецькому математику і механіку Архімеду (287—212 до н. е.), який на основі своїх знань запропонував конструювання різних машин і споруд.
Великим ученим епохи Відродження був Леонардо да Вінчі (1452—1519), створив багато нових механізмів, різні конструкції ткацьких верстатів, деревообробних машин, ряд проектів вантажопідіймальних машин та інших винаходів.
Одним з перших теоретиків вчення про машини був італійський вчений Джероламо Кардана (1506—1576), який описав зубчасті передачі, передачі гнучкою ниткою, сформулював правила побудови годинникових механізмів, дав опис годинникових пружин і балансиру. Інший італійський вчений Галілео Галілей (1564—1642) розробив основи сучасної механіки, вперше сформулював основні кінематичні поняття (швидкість і прискорення), висунув ідею про відносний рух, вивів закон вільного падіння і коливання маятника.
Англійський вчений Ісаак Ньютон (1643—1717) сформулював закони механіки, встановив поняття маси та сили. Він фактично створив сучасну класичну механіку, на основі якої розвивається теорія механізмів і машин.
Значний внесок у розвиток практичної механіки у Росії зробив геніальний вчений-енциклопедист М. В. Ломоносов (1711 — 1765), який розробив конструкції машин для виробництва скла і випробування матеріалів.
Геніальний математик і механік Леонардо Ейлер (1707—1783), автор 850 наукових праць, розв'язав ряд задач з кінематики і динаміки твердого тіла, дослідив коливання і стійкість пружних тіл, займався питанням теорії плоского зачеплення і запропонував евольвентний профіль зубців. Ці дослідження слугували основою для створення французом Т. Олів'є (1793—1858) загальної теорії просторового зачеплення.
Російський винахідник І. І. Ползунов (1728— 1766), уперше розробив проект парового двигуна, І. П. Кулібін (1735—1818), створив годинник-автомат, самокат з педальним приводом (прототип сучасного автомобіля).
Батько і син Черепанови побудували перший у Росії паровоз і запустили першу в Росії залізницю на паровій тязі; у 1712 р. талановитий російський інженер А. К. Нартов (1693—1756) побудував токарно-гвинторізний верстат оригінальної конструкції.
Велику роль у дослідженнях різних питань механіки відіграли іспанський інженер А. Бетанкур (1758—1824), який 17 років працював у Росії; французький вчений Г. Коріоліс (1792—1843); німецький машинознавець Ф.Рело (1829—1905) та ін.
Основоположником російської школи ТММ вважається видатний математик і механік П. Л. Чебишов (1821 — 1894), який виконав ряд досліджень механізмів, дослідив структуру плоских механізмів, створив понад 40 оригінальних механізмів.
Велика роль у створенні школи механіки машин належить видатному математику і механіку М. В. Остроградському (1801 — 1861) — одному з основоположників аналітичної механіки. Його учень І.О.Вишнеградський (1831 — 1895) вважається основоположником теорії автоматичного регулювання.
Розвитку механіки машин сприяли роботи М. Р. Петрова (1836—1920), який заклав основи гідродинамічної теорії тертя у підшипниках.
Значний внесок у динаміку машин зробив М. Є. Жуковський (1847-1921), основоположник сучасної аеродинаміки, автор ряду робіт з прикладної механіки і теорії регулювання ходу машин.
Основоположник теорії просторових механізмів М. І. Мерцалов (1866-1948) запропонував новий метод розрахунку маховика.
Професор Петербурзького політехнічного інституту Л. В. Ассур (1878—1920), створив класифікацію плоских механізмів залежно від їхньої структури.
У розвиток ТММ значний внесок зробили й німецькі вчені. Ф. Грасгоф (1826—1893) математично сформулював умови існування кривошипа у плоскому важільному механізмі.
Метод планів швидкостей і прискорень розробили О. Мор (1835—1918) і Р. Мемке (1857—1927). Теоретичні основи геометричного синтезу механізмів розробив видатний німецький вчений Л. Бурместер (1840—1927), а основи графічної динаміки — австрійський вчений Ф. Віттенбауер (1857—1922).
В Англії математики Д. Сільвестр (1814—1897) і С. Робертс (1827—1913) розробили теорію важільних механізмів для перетворення кривих (пантографів). Р. Вілліс (1800—1875) - автор праці про машини "Принципи механізмів". Він зробив значний внесок у розвиток теорії зубчастих механізмів.
І. І. Артоболевський (1905—1977) — організатор радянської школи теорії механізмів і машин. Ним написано численні праці з структури, кінематики та синтезу механізмів, динаміки машин і теорії машин-автоматів.
А. П. Малишев (1879—1962) розробив методи структурного аналізу та синтезу механізмів. У 1923 р. він вивів структурну формулу для просторових механізмів.
Великий внесок у теорію механізмів і машин зробили Г. Г. Баранов (1899—1968) — автор праці із кінематики просторових механізмів, а також С. М. Кожевников, який розробив загальні методи динамічного дослідження механізмів з пружними ланками і механізмів важковантажних машин.
Професор Л. П. Смирнов (1877—1954) дав розв'язок ряду задач динамічних досліджень машин, його учень В.А.Гавриленко (1899—1977) розробив питання теорії евольвентних зубчастих передач.
У 1994 р. створено Національний комітет України з ТММ.
Складні і відповідальні задачі стоять перед сучасними вченими, інженерами, винахідниками, їм необхідно створити нові, досконаліші машини, автоматичні лінії, які б дозволили нашій країні бути на рівні сучасних вимог.
1.6. ОСНОВНІ ПОНЯТТЯ І ВИЗНАЧЕННЯ.
Кожний механізм або машина складається з окремих деталей. Деталлю називають ту частину механізму або машини, яка виготовлена без складальних операцій.
Кожна рухома деталь або група деталей, які утворюють одну жорстку рухому систему тіл, має назву рухомої ланки механізму або машини.
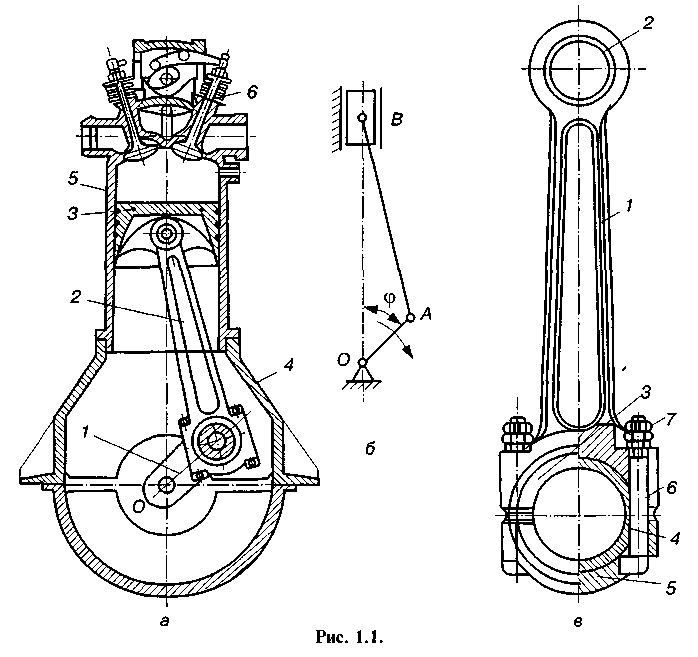
Наприклад, шатун двигуна (рис. 1.1, в) буде однією рухомою ланкою, хоч він може складатися з ряду деталей.
Усі нерухомі деталі утворюють одну нерухому систему тіл, яка називається нерухомою ланкою або стояком. Наприклад, корпус двигуна, підшипники корінного вала тощо разом утворюють одну нерухому ланку, або стояк.
Таким чином, у будь-якому механізмі або машині маємо одну нерухому ланку і одну або декілька рухомих ланок.
У механізмах або машинах ланки з'єднуються одна з одною так, що завжди забезпечується можливість їхнього відносного руху. Рухоме з'єднання двох ланок, які стикаються, називається кінематичною парою.
Рух ланок відносно одна одної визначається формою елементів ланок, якими вони стикаються. Сукупність поверхонь, ліній або точок, які належать ланкам і які стикаються при відносному русі ланок, називають елементами кінематичних пар.
Зв'язана система ланок, що входять у кінематичні пари, утворює кінематичний ланцюг.
Механізм. В основі кожного механізму або машини лежить кінематичний ланцюг. Виходячи з цього, механізму можна дати таке визначення. Механізм є кінематичний ланцюг з однією нерухомою ланкою, призначений виконувати цілком визначені доцільні рухи.
Механізми є гідравлічні, пневматичні, електричні тощо. Тепер дамо більш загальне визначення механізму.
Механізмом називають систему тіл, призначену для перетворення руху одного або кількох тіл у потрібні рухи інших тіл.
З точки зору конструкції механізми поділяють на: важільні, кулачкові, зубчасті, зірчасті (цівкові), мальтійські, храпові, гвинтові, клинові, фрикційні, пасові, ланцюгові, гідравлічні, пневматичні й електричні. Широко використовуються комбіновані механізми: зубчасто-важільні, кулачково-зубчасті, кулачково-важільні тощо.
За функціональним призначенням є механізми [4]:
а) двигунів і перетворювачів;
б) передавальні;
в) виконавчі;
г) керування, контролю і регулювання;
д) подачі, транспортування, живлення і сортування об'єктів,
які обробляються.
Машина. Машина є пристрій, який виконує механічний рух для перетворення енергії, матеріалів та інформації з метою заміни або полегшення фізичної або розумової праці людини.
Залежно від того, які функції виконують машини, їх можна розділити на: а) енергетичні; б) транспортні; в) технологічні; г) контрольно-керуючі; д) математичні; е) кібернетичні.
Прикладом енергетичних машин є електродвигуни, парові машини, двигуни внутрішнього згоряння, турбіни, генератори електричного струму тощо.
Транспортною називають машину, що призначена для зміни положення оброблюваного матеріалу, предметів або людей. До транспортних машин належать крани, транспортери, автокари, автомобілі, тепловози, трактори, ліфти, літаки тощо.
Технологічною називають машину, у якій змінюються властивості, стан, форма оброблюваного матеріалу або об'єкта (металорізальні верстати, прокатні стани, та ін. )
Машина, в якій перетворення енергії, матеріалів та інформації відбувається без втручання людини, називається машиною-автоматом.
1.3.СТРУКТУРНИЙ АНАЛІЗ МЕХАНІЗМІВ
1.3.1. КІНЕМАТИЧНІ ПАРИ І ЇХНЯ КЛАСИФІКАЦІЯ
КІНЕМАТИЧНА ПАРА (КП), - рухоме з'єднання двох ланок. ЕЛЕМЕНТИ ПАРИ - сукупність поверхонь, ліній, точок ланки, що входять у контакт з іншою ланкою.
Кінематичні пари поділяються на НИЖЧІ і ВИЩІ. КП, утворені елементами ланок, що контактують по поверхні, називають НИЖЧИМИ. У ВИЩІЙ КП елементи ланок контактують по точці чи лінії.
Для того щоб елементи пари знаходилися в постійному зіткненні, пара повинна бути замкнена ГЕОМЕТРИЧНИМ чи СИЛОВИМ способом. (геометрично - за рахунок конструктивної форми, силовий - за рахунок сили ваги, пружності і т.п.)
У такий спосіб на відносний рух кожної ланки КП накладаються обмеження, що залежать від способу з'єднання ланок пари. Ці обмеження будемо називати УМОВАМИ ЗВ'ЯЗКУ в КП.
У загальному випадку тверде тіло має в просторі 6 видів незалежних можливих рухів: трьома обертаннями навколо осей X,Y,Z і трьома поступальними рухами вздовж тих же осей.
Позначимо: S - число умов зв'язку. H - число ступенів вільності.
S може приймати значення:
1 <= S <= 5.
Тоді число ступенів вільності H ланки КП у ВІДНОСНОМУ русі:
H = 6 - S (1)
З (1) випливає, що H також може приймати значення:
1 <= H <= 5.
Усі кінематичні пари - поділяють на КЛАСИ залежно від числа умов зв'язку, що зумовлюють відносний рух їх ланок. Так як S = 1,..5, то число класів КП дорівнює 5. Отже маємо КП 1,2,3,4,5 класів. КЛАС КП може бути визначений з (1):
S = 6 – H . (2)
Отже, необхідно підрахувати число незалежних рухів, які може мати ланка КП у відносному русі і відняти отримане число від 6.
Приклади КП представлені на рис.1.4,...1.9 (у правій частині рисунків показані умовні позначення відповідних КП на схемах).
1. Куля 1 перекочується з ковзанням по площині 2. Для цієї КП можливі 5 ступенів вільності ( 5 відносних, незалежних переміщень, Н = 5 ). Тоді число умов зв'язку:
S = 6 - H = 6 - 5 = 1.
Отже, це кінематична пара 1-го класу.
2. Циліндр 1 перекочується з ковзанням по площині 2 (рис. 1.3).
Для цієї КП можливі 4 ступені вільності (4 відносних незалежних переміщень, Н = 4 ). Число умов зв'язку:
S = 6 - H = 6 - 4 = 2.
Отже, це кінематична пара 2-го класу.
3. Сферичний палець 1 (pис. 1.4.) oбертається усередині сферичної обойми 2. Для цієї КП можливі 3 ступені вільності ( 3 обертань навколо ординатних осей, OY, OX, OZ), H = 3.
Число умов зв'язку: S = 6 - H = 6 - 3 = 3. Отже, це кінематична пара 3-го класу.
4. Циліндрична втулка 1 (рис.1.5) переміщається й обертається по циліндричному пальцю 2 ( 2 ступені вільності, H = 2).