Исследование преобразователей “ток-частота” цифровых измерительных приборов летательных аппаратов
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
Кафедра 303
УТВЕРЖДАЮ
Заведующий кафедрой 303
_______________ Осипов В.Г.
«____»__________201__ г.
Лабораторная работа № 20
«Исследование преобразователей “ток-частота” цифровых измерительных приборов летательных аппаратов».
По дисциплине: «Основы проектирования приборов и систем».
Специальность 200103 Авиационные приборы и измерительно-
вычислительные комплексы.
Обсуждено на заседании кафедры «___»________________201__г.
Протокол № ____
МАИ 201 __г.
ОГЛАВЛЕНИЕ:
1. Назначение преобразователя “ток-частота” ………….………………. 3
2. Цель работы ………………………………………………………………... 3
3. Теоретическая часть:
3.1 Описание датчика линейных ускорений …………………………….. 3
3.2 Методы преобразования напряжения или тока в частоту……… 4
3.3 Принцип действия преобразователя “ток-частота” с импульсной обратной связью………………………………………………………………… 5
4. Экспериментальная часть:
4.1 Содержание задания ……………………………………………………..7
4.2 Описание установки .…………………………………….…...……..7
4.3 Методика проведения эксперимента……………………...……...8
4.4 Расчетная часть………………………………………………….….9
5. Требования, предъявляемые к отсчету………………………………….. 9
6. Литература ……………………………………………………….….……….. 9
1 НАЗНАЧЕНИЕ ПРЕОБРАЗОВАТЕЛЯ “ТОК-ЧАСТОТА”
В связи с широким использованием на летательных аппаратах бортовых циф�ровых вы�числительных машин (БЦВМ) возникает необходимость преобразова�ния сигналов датчи�ков первичной информации в цифровую форму. При этом к аналого-цифровым преобра�зователям (АЦП) предъявляют повышенные требо�вания к точности, быстродействию, по�мехоустойчивости и надежности. Таким требованиям удовлетворяют АЦП с промежуточ�ным частотно-временным пре�образованием. В таких устройствах используются датчики первичной информа�ции, в которых воспринимаемая величина вначале представляется в виде на�пряжения или тока, затем преобразуемые в частоту или период следования им�пульсов. Известно, что частота или период электрического сигнала довольно просто реа�лизуется в цифровой код. В данной работе рассматривается пре�образователь выход�ного тока, который может быть получен в частном случае с датчика линейных ускорений, в частоту следования импульсов.
2 ЦЕЛЬ РАБОТЫ
Настоящая работа ставит своей целью изучить назначение, принципы дей�ствия, особен�ности устройства, а так же основные характеристики преобразова�теля тока в частоту сле�дования импульсов. При выполнении работы необходимо также ознакомиться с методами проведения эксперимента, особенностями лабо�раторной установки и снять эксперимен�тальные характеристики, проанализиро�вать погрешности преобразователя и провести их оценки по результатам экспе�римента.
3 ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
3.1 Описание датчика линейных ускорений
Датчики ускорений (акселерометры) предназначены для измерения ускорений лета�тельного аппарата (Л.А.). В инерциальных системах навигации акселеро�метры использу�ются для определения путевой скорости и местоположения Л.А., для чего сигнал, пропорциональный ускорению, интегрируется.
На Л.А. основное применение нашел инерциальный метод измерения ускоре�ний, за�ключающийся в измерении силы, развиваемой инерционной массой при ее движении с ускорением.
В зависимости от способа измерения силы, различают акселерометры пру�жинные и компенсационные. В системах навигации, в которых требуется высо�кая точность, приме�няются только компенсационные акселерометры.
В компенсационных акселерометрах сила, развиваемая инерционной массой, уравно�вешивается обратным преобразованием “ток-сила”.
В качестве выходного сигнала используется ток, поступающий на вход обрат�ного преоб�разователя, или напряжение, развиваемое на эталонном сопротив�лении, включенным в цепь тока.
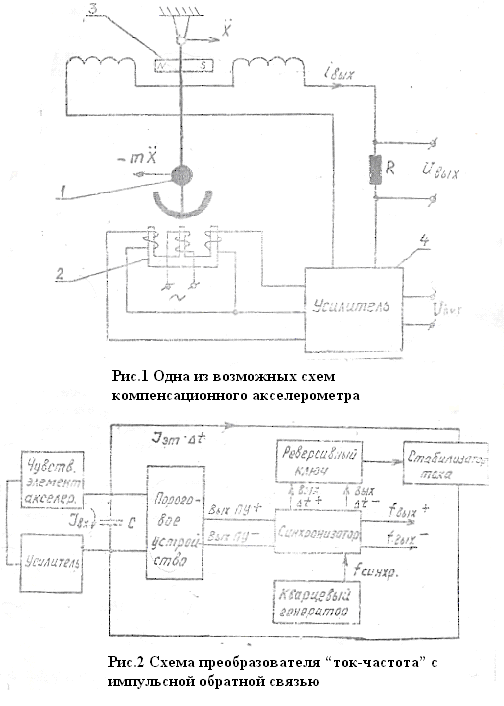
На рис.1 приведена одна из возможных схем компенсационного акселеро�метра маят�никового типа.
Отклонение маятника 1 под действием ускорения преобразуется индуктивным преобра�зователем 2 в электрический сигнал. Этот сигнал после усиления и вы�прямления подается на обмотки моментного магнитоэлектрического преобразо�вателя 3, который развивает компенсационный момент. Электрический ток на выходе усилителя 4, а, следовательно, и падение напряжения созда�ваемое этим током на добавочном сопротивлении, пропорциональны измеряе�мому ускорению.
В современных Л.А. информация об ускорении требуется, как правило, в цифровом коде, удобном для ЦВМ.
Теоретически информацию об измеряемом ускорении можно было бы полу�чить, исполь�зуя преобразователь типа “ток-код” или “напряжение-код”. Однако практически такое реше�ние реализовать невозможно из-за слишком большого () диапазона измерения тока или напряжения, которые необходимо преобразовать в код.
Создание аналого-цифровых преобразователей на такой диапазон сопряжено с прин�ципиальными трудностями. Поэтому на практике нашел широкое приме�нение метод пре�образования ускорения в код скорости с помощью, так назы�ваемых, интегрирующих преоб�разователей. Основой таких преобразователей является “ток-частота”.
3.2 Методы преобразования напряжения или тока в частоту
Преобразователи напряжения или тока в код (ПНК) являются самыми распро�странен�ными среди всех видов аналого-цифровых преобразователей (АЦП). Причем в су�ществующих ПНК используются все три классических метода преоб�разования: последова�тельного счета, поразрядного кодирования и считывания.
Наиболее простым являются ПНК, построенные по методу последовательного счета. Классическим примером этого метода является ПНК со ступенчатым пи�лообразным на�пряжением, которое вырабатывается обратным преобразовате�лем код-напряжение и сравнивается с преобразуемым напряжением . Схема сравнения напряжений управ�ляет поступлением импульсов на счетчик, который своим выходом связан с ПНК. Однако, такие преобразователи напряжения в код в виду их малого быстродействия используется в основном в многоканальных системах. Остальные виды ПНК последовательного счета используют промежу�точное преобразование напряжения или тока в другую величину: чаще всего во временной интервал, период или частоту электрического сигнала.
Широкое распространение нашли ПНК с промежуточным преобразованием напряжения во временной интервал. Основными узлами такого преобразова�теля являются генератор напряжения (ГПН) и схема сравнения (СС). Импульс запуска поступает на ГПН, который начинает вырабатывать пилообразное на�пряжение. Одновременно счетчик начинает счи�тать импульсы, поступающие с генератора импульсов ГИ. В момент, когда пилообразно�возрастающее напряже�ние ГПН станет равным, срабатывает схема сравнения СС, ко�торая остано�вит счетчик импульсов. Количество импульсов, подсчитанное счетчиком, будет пропорционально времени от запуска ГПН до момента равенства его линейно воз�растающего напряжения и . В свою очередь это время линейно зависит от .
Рассмотрим ПНК с промежуточным преобразованием в частоту, так как в на�стоящей ра�боте представлен один из видов этих устройств.
Большую группу преобразователей постоянного напряжения в частоту пред�ставляют устройства типа релаксационного или гармонического генератора, час�тота которого опре�деляется параметрами частотно-зависимой цепи.
Наибольшее распространение получили ПНК частотного преобразования, принцип дей�ствия которых основан на методе аналогового интегрирования. После импульса запуска напряжение их подается на вход линейного интегра�тора, а затем производится сравнение напряжения на выходе интегратора с не�которым постоянным напряжением. В момент ра�венства сравниваемых напря�жений устройство сравнения выдает импульс, который воз�вращает интегратор в исходное состояние. Управляемый триггер меняет каждый раз свое состояние в моменты прихода сигнала со схемы сравнения. Частота переключения три�ггера будет обратно пропорциональна периоду интегрирования и прямо пропорцио�нальна измеряемому напряжению :
или ; ; где -опорное напряжение, -постоянная интегрирования.
Для устранения влияния обратного хода интегратора, используют схему с двумя работающими интеграторами. Интегрирующие ПНК обладают высокой помехоустойчивостью и точностью. При аналоговом интегрировании ввиду раз�личных статических характеристик сигнала и шума растет отношение сигнал/шум. Кроме того, используя интегрирующие ПНК, можно получать функциональную, например квадратичную, зависимость выходной час�тоты от входного напряже�ния.
Значительно более совершенным является метод компенсационного интегри�рования, обладающий высокой точностью. В этих преобразователях вначале идет интегрирова�ние входного сигнала , от исходного значения в течение не�которого времени, которое фиксируется переполнением счетчика:. Затем в течение некоторого времени происходит уменьшение напряжения с выхода интегратора до значения за счет интегрирования эталонного напряже�ния , имеющего противоположную полярность: . За время в счет�чике будет зафиксирован код: , где -частота генератора им�пульсов ГИ. Если принять, что и , , то, и. Отсюда, т.е. - пропорционально входному на�пряжению.
Разновидностью преобразователя с компенсационным интегрированием яв�ляется пре�образователь напряжения в частоту с импульсной обратной связью. Такой тип преобразо�вателя, рассмотренный в настоящей работе, является наи�более перспективным.
3.3 Принцип действия преобразователя “ток-частота” с импульсной обратной связью.
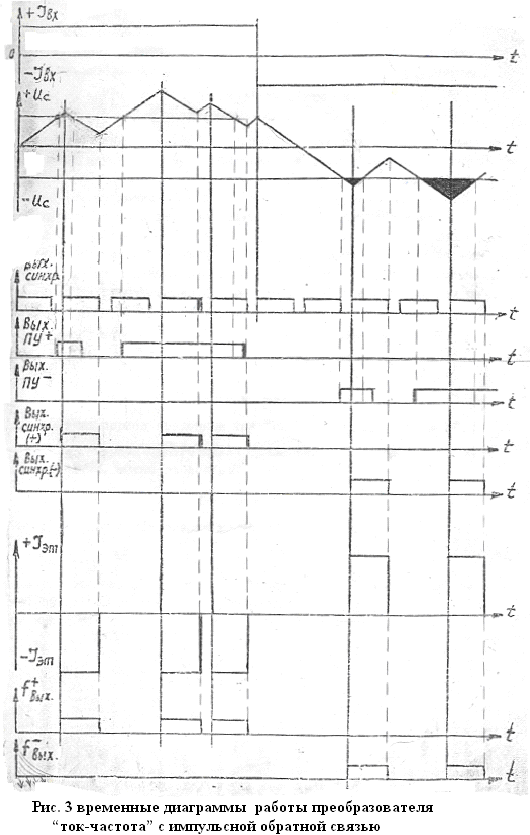
На рис.2 приведена схема преобразователя “ток-частота” с импульсной обрат�ной связью, а на рис.3 приведены временные диаграммы его работы.
Процесс работы преобразователя описывается следующим образом. Преоб�разуемый ток , протекая через интегрирующий конденсатор, заряжает его. Когда напряжение на конденсаторе , достигнет величины срабатывания од�ного из пороговых устройств, имеющих разные уровни, последнее формирует выходной сигнал, поступающий на сиг�нальный вход соответствующего синхро�низатора. При этом очередной синхроимпульс эта�лонной длительности , посту�пающий на такой вход синхронизатора, формирует на его вы�ходе сигнал той же длительности, управляющий реверсивным ключом. Реверсивный ключ откры�вается, и в течение интервала времени через интегрирующий конденсатор про�те�кает эталонный ток, уровень которого поддерживается стабилизатором тока, а направление - противоположно преобразуемому току .
При обеспечении условия заряд и, следовательно, напряжение на кон�денсаторе начинают уменьшаться со скоростью, пропорциональной разности , возвращая порого�вое устройство в исходное состояние. В конце интервала в исходное состояние возвра�щаются синхронизатор и реверсивный ключ, а на�пряжение на конденсаторе вновь начинает возрастать до уровня срабатывания порогового устройства.
Выходные импульсы формируются синхронизатором каждый раз одно�временно с подачей управляющего сигнала на реверсивный ключ.
Рассмотрим один цикл работы преобразователя в установившемся режиме между двумя соседними моментами и срабатывания порогового устройства, идеализируя работу узлов схемы и считая, что в течение рассматриваемого времени преобразуемый ток и уровни срабатывания пороговых устройств и ве�личина емкости интегрирующего конденса�тора остаются постоянными; эквива�лентное сопротивление утечки конденсатора и гальва�нически связанных с ним участков схемы равны бесконечности; значение и длительность обратной связи постоянны; между моментом срабатывания порогового устройства и от�крытием реверсивного ключа не существует задержки.
За время одного цикла преобразуемый ток вносит в интегрирующую емкость заряд, равный , где -продолжительность цикла.
За этот же период эталонный ток “спишет” заряд, равный .
Так как за время одного цикла суммарный заряд емкости остается неизмен�ным, можно записать:
Отсюда частота следования циклов равна:
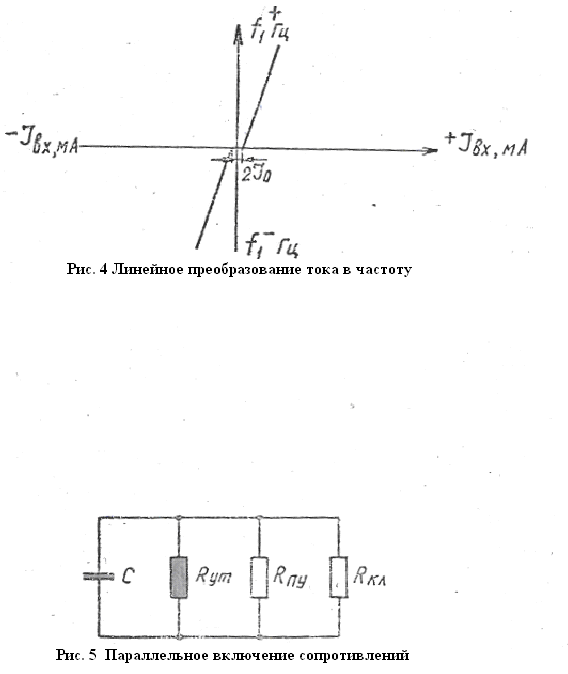
Таким образом, преобразователь, построенный на рассматриваемой схеме, обеспечи�вает линейное преобразование тока в частоту следования импульсов, т.е. имеем характеристику: (рис. 4)
Как видим из характеристики в преобразователе имеется зона нечувствитель�ности , величина которой в первом приближении равна току, протекающим через - эквива�лентное сопротивление, шунтирующее конденсатор C при на�пряжении на конденсаторе, равным порогу срабатывания порогового уст�ройства.
где - напряжение срабатывания порогового устройства;
- эквивалентное сопротивление, шунтирующее конденсатор.
Эквивалентная схема шунтирования конденсатора будет состоять из парал�лельного включения (рис.5) сопротивлений:
- сопротивление утечки конденсатора;
- сопротивление утечки порогового устройства;
- сопротивление утечки реверсивного ключа.
Основные погрешности преобразователя следующие:
-погрешность за счет утечек интегратора, ;
-погрешность за счет нестабильности стабилизатора,;
-погрешность за счет нестабильности длительности импульса, .
4. ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ.
4.1 Содержание задания.
1) Снять характеристику преобразователя в диапазоне входных токов 4-40 мА при крутизне преобразования:
2) Определить относительную погрешность преобразования в заданных точках.
3) Построить зависимость для каждого заданного значения с учетом зоны не�чувствительности.
4) Построить зависимости для каждого заданного значения
5) Сделать выводы по проделанной работе.
4.2 Описание установки
Блок-схема лабораторной установки состоит из следующих основных элемен�тов: задат�чика входного тока, интегратора, преобразователя тока, стабилизатора эталонного тока, формирователя импульсов заданной длительности , миллиам�перметра для измерения входного и эталонного токов, блока питания.
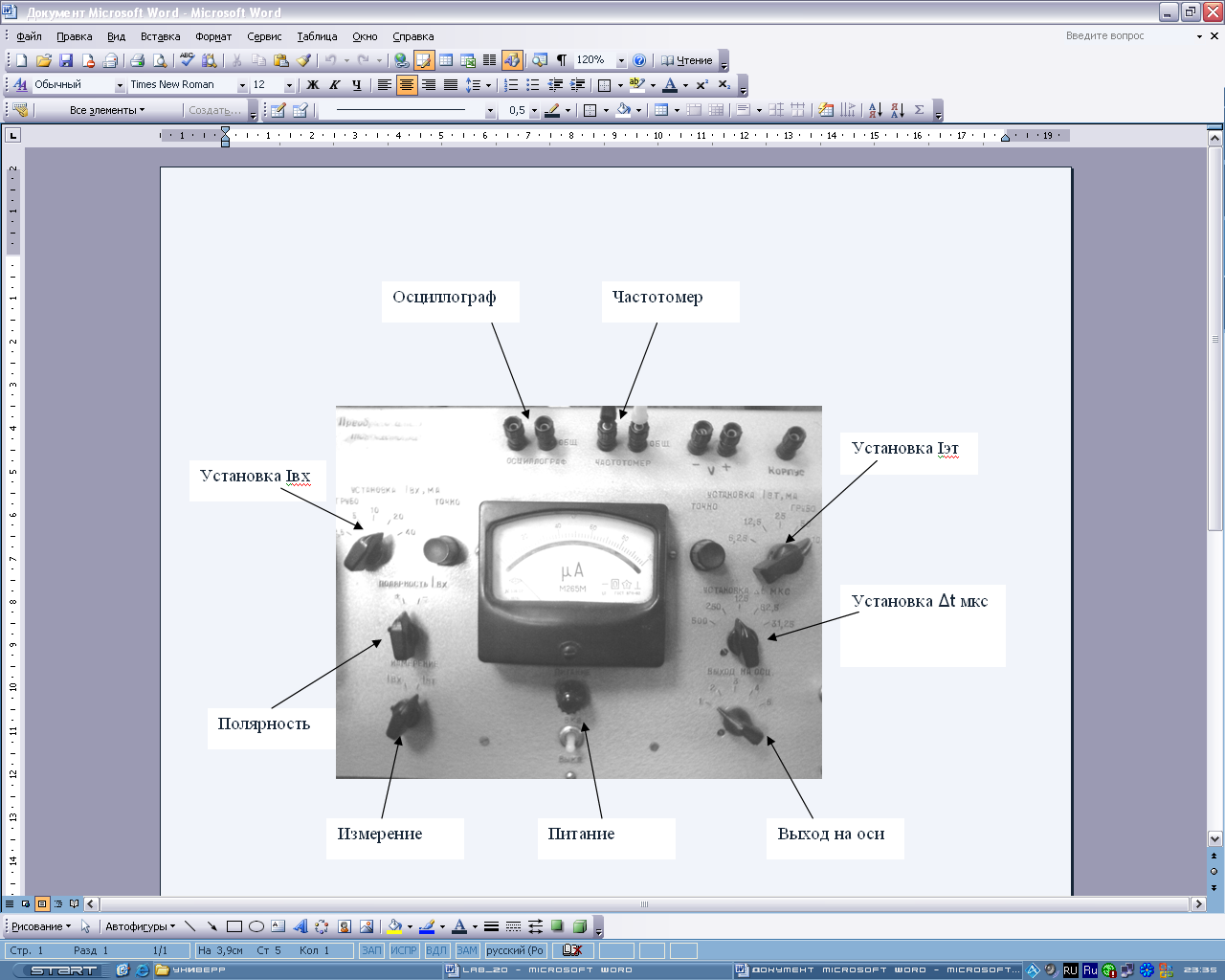
Входной сигнал, имитирующий ток “электрической пружины” акселерометра, подается с задатчика входного тока на интегрирующий элемент, в качестве кото�рого используется конденсатор типа К77-1. Направление тока может изменяться с помощью переключателя “Полярность iвх “.
Установка величины входного тока производится ручками “Установка iвх “, “грубо”, “точно”. Величина входного тока контролируется миллиамперметром, установленном на передней панели установки, при установке переключателя “измерение” в положение “ iвх “.
С помощью внутреннего шунта верхний предел измерения микроамперметра расширен до 100 мА. Величина эталонного тока может регулироваться с по�мощью ручек “ “, “грубо”, “точно”.
Контроль величины эталонного тока производится при переводе переключа�теля “измерение” в положение “ “. Более точно измерение входного и эталон�ного тока может быть произведено с помощью внешнего многопредельного мил�лиамперметра, подклю�ченного к клеммам “внешний амперметр”. При использо�вании встроенного прибора между указанными клеммами должна стоять пере�мычка.
Величина импульса эталонной длительности может дискретно изменяться в пределах от 31,25 мксек до 500 мксек переключателем “Установка t “.
В установке предусмотрена возможность визуального контроля работоспособ�ности установки с помощью осциллографа, подключаемого к клеммам “осциллограф”.
Выходная частота контролируется частотомером, подключенным к клеммам “частотомер”.
4.3 Методика проведения эксперимента.
1) Включить частотомер Ф 5080. Поставить переключатель рода работ в положе�ние “измерение частоты”. Входной аттенюатор - в положение измерения положи�тельных им�пульсов и входной делитель - в положение УПТ 1:1.
Подключить вход частотомера к лабораторной установке - клеммам “частотомер”.
2) Тумблер “Сеть 220В” поставить в положение “Вкл.”.
3) Установить переключатель “Установка iэт “,”грубо” в положение 100, переклю�чатель “Установка tмакс” - в положение 500, переключатель “Измерение” - в поло�жение iэт, пере�ключатель “Установка iвх “ - в положение 40, полярность iвх - в по�ложение “+”.
4) Установить мА ручкой “Установка iэт” “точно”, произведя контроль пока�заний по встроенному амперметру.
5) Плавно изменяя входной ток через каждые 4 мА в диапазоне -40+40 мА, за�писать пока�зания частоты по частотомеру для пяти значений крутизны преобра�зования: 20 Гц/мА, 40 Гц/мА, 80 Гц/мА, 160 Гц/мА, 320 Гц/мА. Получение необхо�димой крутизны преобразований производить за счет изменения .
6) Результаты экспериментов по п.5 записать в таблицу по форме
|
Вых. ток,мА
Вых.частота,Гц
|
40
|
36
|
32
|
28
|
24
|
20
|
…
|
-36
|
-40
|
примечания
|
|

|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
4.4 Расчетная часть
1) Исходя из формулы для каждого заданного и мА опреде�лить значе�ние .
2) Определить принимаемое за истинное, по формуле р для каж�дого за�данного
3) Определить зону нечувствительности для значений В;мОм, мОм, мОм.
4) Определить погрешность по формуле где - средняя выходная частота.
5 ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ОТЧЕТУ
Отчет по проделанной работе должен содержать:
- название работы, цель работы;
- схему датчика первичной информации или преобразователя “ток-частота”;
- основные формулы преобразования;
- данные эксперимента в виде таблиц и графиков;
- расчетная часть;
- выводы по проделанной работе.
6 ЛИТЕРАТУРА
1) Шляндин В.М. Цифровые измерительные устройства; М.:Высшая школа, 1981 335с.
2) Браславский Д.А. и др. Авиационные приборы и автоматы; М.:Машиностроение, 1978
3) Боднер В.А. Приборы первичной информации; М.:Машиностроение, 1981
4) Гитис Э.И., Писклов В.В. Аналого-цифровые преобразова�тели; М.:Энергоиздат,1981 360с.
Исследование преобразователей “ток-частота” цифровых измерительных приборов летательных аппаратов