Обработка изображений
Лекция 14
Обработка изображений
Обработка изображений – это деятельность над изображениями
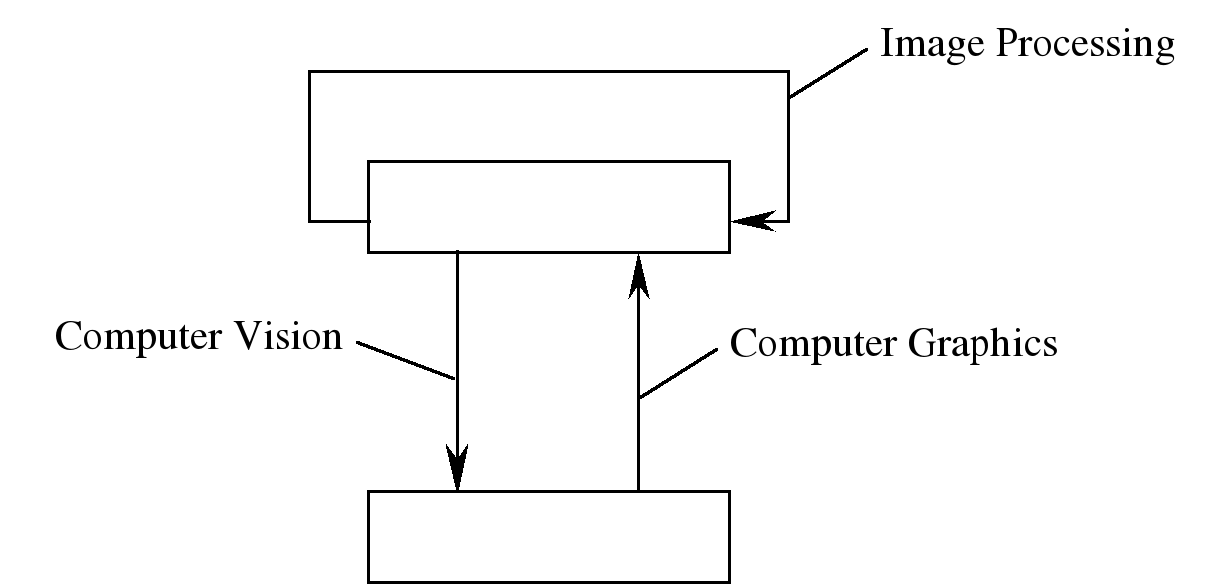
При обработке изображений существует следующие группы задач

Мы ограничимся работой только с цифровым изображением.
Цифровые преобразования по цели преобразования можно разделить на два типа:
· Реставрация изображения - компенсирование имеющегося искажения (например, плохие условия фотосъемки)
· Улучшение изображения - это искажение изображения с целью улучшения визуального восприятия или для преобразования в форму, удобную для дальнейшей обработки.
Цифровые преобразования по методам преобразования можно разделить на три типа:
· Амплитудные преобразования (АП)
· Геометрические преобразования (ГП)
· Комбинированные преобразования (КП)
16.1. Амплитудные преобразования
Координаты точек не меняются.
 - зависит от совокупности точек вокруг точки
- зависит от совокупности точек вокруг точки  (в окрестности)
(в окрестности)
Формула амплитудного преобразования:

Геометрические преобразования
VR=VS, здесь изменяется местоположение точки без искажения амплитуды.


16.3. Комбинированные преобразования
Если преобразование очень сложное и не входит ни в амплитудные преобразования, ни в геометрические преобразования, то оно называется комбинированным преобразованием. Совместно задействованы амплитудные и геометрические преобразования.
Частные случаи геометрических преобразований
1) Амплитудные преобразования
2) Геометрические Преобразования бывают:
· Неразделимые (НРГП)


· Разделимые (РГП)
Как правило все ГП – неразделимые и лишь в редких случаях говорят о разделимых ГП.
3)Проективные преобразования
описываются следующим образом:

Функции преобразования могут быть представлены в виде:

XR – можно сопоставить с яркостью.

 Афинные изображения будут отражаться на световых клиньях.
Афинные изображения будут отражаться на световых клиньях.
В данном случае вы можете наблюдать горизонтальные световые клинья (яркость в пределах столбца является постоянной, а от столбца к столбцу она меняется.)
Алгоритм ГП.
При осуществлении геометрических преобразований существует две схемы пересчета:
1. Схема прямого пересчета
Недостаток: если идет растяжение изображения, то могут образовываться дырки, если же идет сжатие, то в одной точке может оказаться несколько точек.
Появляются дырки. С ними можно бороться с помощью интерполяции. Поэтому схема проективного преобразования не используется
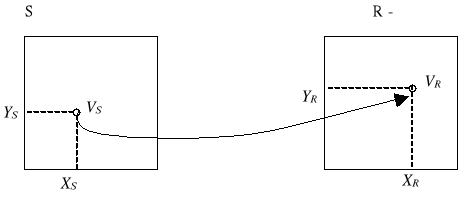
В основном используется схема обратного пересчета: перебираем точки результирующего изображения.
2. Схема обратного пересчета
По результирующим координатам вычисляются текущие точки. Здесь идет перебор всех точек результирующего изображения.  переписывает из S в R.
переписывает из S в R.
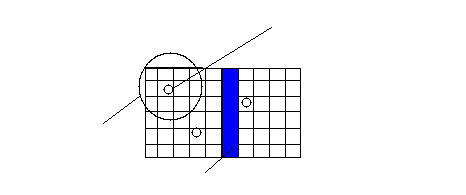
Достоинство: не будет дырок как в предыдущем случае
Линию другого цвета мы не видим. Чтобы ее увидеть необходимо использовать усредненное значение.
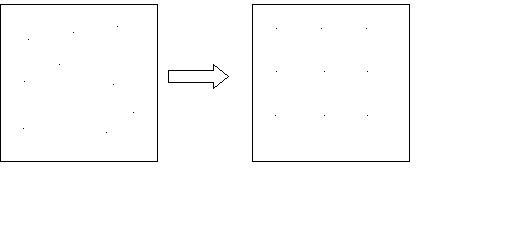
16.4. Деформация изображения.
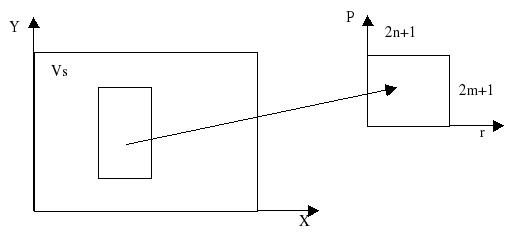
Имеется система , на вход которой подают изображение :
l =1….L ( пусть у нас l-текстовых точек).
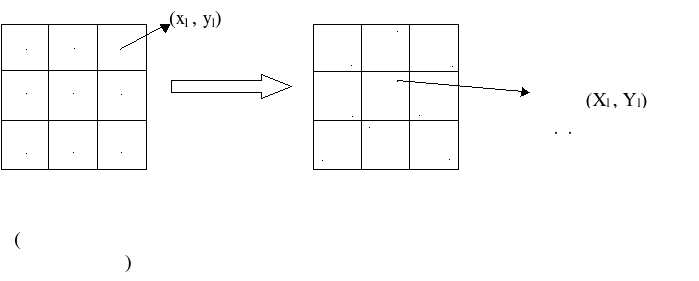
Цифровое преобразование, то есть находим функции преобразования координат, которые позволяют перейти к точке с координатами (xL yL), то есть мы ищем функции (выражения записаны для схемы обратного пересчета):
Мы постараемся найти функции, которые могут описать уход точек.
Xl = Fx (xl , yl)
Yl = Fy (xl , yl)
Мы будем работать по схеме обратного пересчёта.
Мы перебираем точки реставрационного изображения. Решение задачи простое, если функции искать в области двумерных полиномов. Для каждой точки с координатой (x ,y) мы выполняем обратный пересчёт
- для y с использованием Fy
- для x с использованием Fx
Fx (x,y) =  Anxi(n) yj(n)
Anxi(n) yj(n)
Fy (x,y) =  Bnxi(n) yj(n)
Bnxi(n) yj(n)

n=1...N
N=  (k+1)(k+2)
(k+1)(k+2)
При k=2 ; N=6
|
n
|
1
|
2
|
3
|
4
|
5
|
6
|
|
I(n)
|
0
|
1
|
2
|
0
|
1
|
0
|
|
J(n)
|
0
|
0
|
0
|
1
|
1
|
2
|
Fx (x,y) = A1 + A2x + A3x2 + A4y +A5xy+A6y2
Ищем коэффициенты полиномов так чтобы реставрация произошла как можно лучше. Запишем остаточное отклонение , которое мы хотим сминимизировать.
D =  (Xl - Fx (Xl,Yl))2 + (Yl - Fy (Xl,Yl))2
(Xl - Fx (Xl,Yl))2 + (Yl - Fy (Xl,Yl))2
D = 0;
Будем устремлять D к min.
{An Bn} = Argmin [D(xl,yl,Xl,Yl,An,Bn)]
при условии, что: L = 1…..4 , n = 1…….N

 An
An  tl,n tl,m =
tl,n tl,m =  Xl tl,m m = 1…N
Xl tl,m m = 1…N
 Bn
Bn  tl,n tl,m =
tl,n tl,m =  Yl tl,m m = 1…N
Yl tl,m m = 1…N
где : tl,m = xli(m) ylj(m)
Случайная величина: 
Если  => отклонение от пиксела
=> отклонение от пиксела 
Степень полинома берут, начиная с 2, 3, 4, …
16.5. Основные функции оконного преобразования
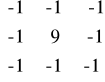
1. Линейные преобразования (взвешанное суммирование). Каждый элемент имеет яркость, и результативную яркость находим, суммируя все яркости.
Например:
Задачу повышения четкости решаем следующим образом:
Маска 2 Маска 3

Проходя несколько раз по этим окошечкам, можно получить зернистое изображение.
Пример:
Маска (изображен самолет). Этой маске можно сопоставить коэффициенты соответствующие изображению. Все, что не относится к самолету будет равно 0.

изображение, которое
надо обработать
2. 
Целевые фильтры (импульсная фильтрация)
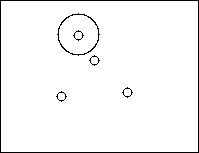
Изображение – плавная функция. Импульсный шум – точки вычисляются по отношению к областям окружностей.
Считаем среднее значение этих точек и в результирующем изображении в точку с координатами (x y) записываем исходную точку.
1) Усреднённая маска (3*3)
2) Медианный фильтр (3*3)
3) 1. Вычисление среднего значения.
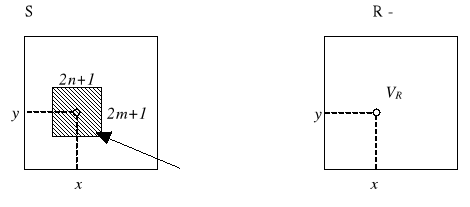
2. VR (x ,y) =
Q’(-r, -q) = Q’ (N-r, N-q) (свойство симметрии).
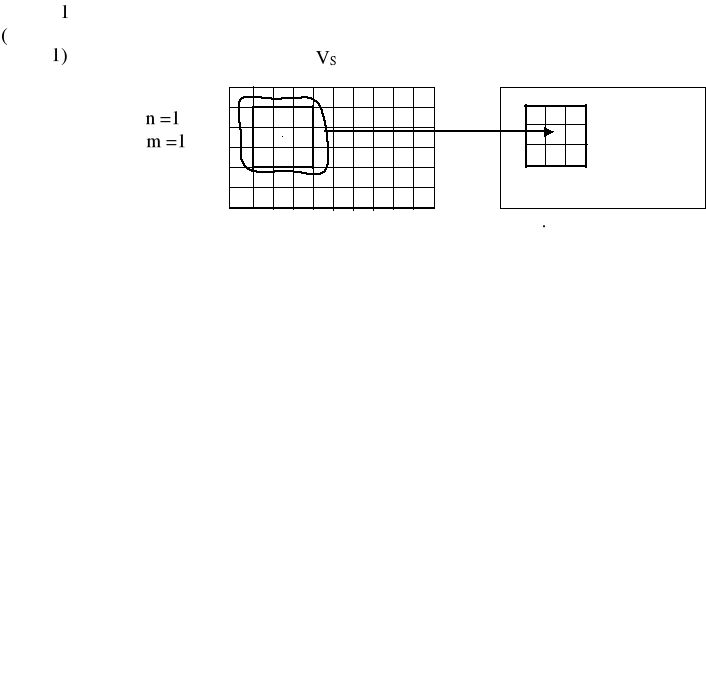
VR(x, y) = 
 VS(x+i, y+j) Q(n+i, m+j)
VS(x+i, y+j) Q(n+i, m+j)
VR(x, y) = 
 VS(i, y) Q’(x-i, y-j)
VS(i, y) Q’(x-i, y-j)
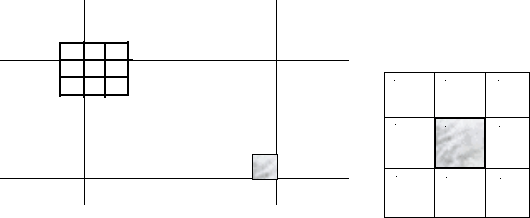
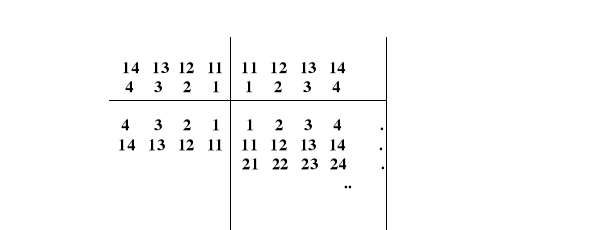
1) Циклическое дополнение.
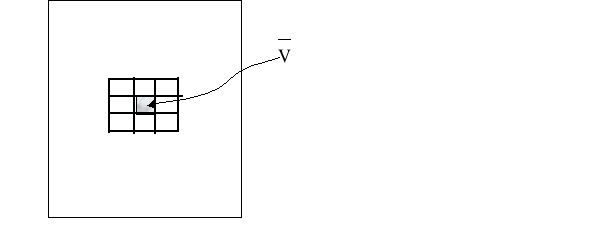
Для одной точки имеем следующую картинку:

2) Симметричное дополнение
Формула для обработки окошка: VR(x, y) = 
 VS(x+i, y+j) Q(n+i, m+j)
VS(x+i, y+j) Q(n+i, m+j)
Формула для свертки: VR(x, y) = 
 VS(i, y) Q’(x-i, y-j)
VS(i, y) Q’(x-i, y-j)
Пример