МЕТОДЫ РАЗДЕЛЕНИЯ В ПРОСТРАНСТВЕ ПРИЗНАКОВ
Лекция 08
Тема. МЕТОДЫ РАЗДЕЛЕНИЯ В ПРОСТРАНСТВЕ ПРИЗНАКОВ
Цель. Дать понятие о
Учебная. Разъяснить
Развивающая. Развивать логическое мышление и естественное - научное мировоззрение.
Воспитательная. Воспитывать интерес к научным достижениям и открытиям в отрасли телекоммуникации.
Межпредметные связи:
Обеспечивающие: информатика, математика, вычислительная техника и МП, системы программирования.
Обеспечиваемые: Стажерская практика
Методическое обеспечение и оборудование:
Методическая разработка к занятию.
Учебный план.
Учебная программа
Рабочая программа.
Инструктаж по технике безопасности.
Технические средства обучения: персональный компьютер.
Обеспечение рабочих мест:
Рабочие тетради
Ход лекции.
Организационный момент.
Анализ и проверка домашней работы
Ответьте на вопросы:
Что называют ложной тревогой?
Что подразумевает пропуск цели (дефекта)?
Дайте объяснение риску постав щика и риску заказчика.
Приведите формулу метода минимального числа ошибочных решений. Дайте определение неосторожного решения.
Для каких случаев предназначен метод минимакса?
Метод Неймана—Пирсона. Объясните его принцип.
Для каких целей применяется зона неопределенности?
План лекции
ЛИНЕЙНЫЕ МЕТОДЫ РАЗДЕЛЕНИЯ
РАЗДЕЛЕНИЕ В ДИАГНОСТИЧЕСКОМ ПРОСТРАНСТВЕ
МЕТОД ПОТЕНЦИАЛЬНЫХ ФУНКЦИЙ И МЕТОД ПОТЕНЦИАЛОВ
Одними из наиболее важных методов диагностики являются методы разделения в пространстве призна ков. Эти методы основаны на естественной «гипотезе компакт ности», в соответствии с которой точки, отображающие одно и то же состояние (диагноз), группируются в одной области про странства признаков.
ЛИНЕЙНЫЕ МЕТОДЫ РАЗДЕЛЕНИЯ
Пространство признаков. Как уже указывалось, каждая кон кретная система (объект) может быть охарактеризована век тором х в многомерном пространстве признаков:
х= {x1, x2,...,xN).
Компоненты вектора х могут быть дискретными или непре рывными величинами. Дискретные величины обычно выражают разряды (интервалы) диагностических признаков (количественных или качественных), непрерывные величины —диагностические параметры системы (температуру, давление, вибрационные пере грузки и т. п.).
Часто оказывается удобным представить объект как точку многомерного пространства (конец вектора x). Если система описывается с помощью простых (двухразрядных) признаков, то компоненты вектора выражаются двоичными числами. Тогда, естественно, каждый из объектов в пространстве простых призна ков является одной из вершин единичного N-мерного куба. На пример, в трехмерном пространстве объект х (011) изображается точкой, показанной на рис.1.
Во многих случаях удобно ис пользовать трехразрядные признаки, принимая
х ={
1 наличие признака;
-1 отсутствие признака;
0 не обследовано.
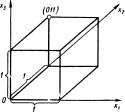
Рис. 1- Пространство простых двухразряд ных признаков
Пространство признаков располагается по граням и вершинам N-мерного куба, сторона которого равна двум. Если точка (век тор) х относится к объекту (системе) с диагнозом Di-, то это за писывается так:
 (1)
(1)
Равенство (1) одновременно означает, что точка (объект) х относится к области диагноза Di в пространстве признаков.
Областью диагноза Dt называется множество точек простран ства признаков (объектов), обладающих состоянием (диагнозом) Dt. Обычно, такие области заполняют достаточно компактно часть пространства признаков. Условие компактности состоит в том, что число граничных точек мало по сравнению с общим числом точек области.
Дискриминантные и разделяющие функции. Пусть в пространстве признаков (параметров) содержатся точки, принадлежащие п различным диагнозам (состояниям) D1…Dn
Дискриминантными функциями для этих диагнозов будем называть скалярные функции fx (i = 1, 2, ..., n), удовлетво ряющие условию
Скаляр (от лат. scalaris — ступенчатый) — величина (возможно переменная, то есть функция), каждое значение которой может быть выражено одним числом (чаще всего подразумевается вещественное число).
Таким образом, функция ft (x) принимает для точек диаг ноза D1 наибольшие значения по сравнению со всеми другими дискриминантными функциями. Обозначение fx в краткой форме указывает зависимость функции от всех координат про странства х1 ..., xN; fi (x)=fi (x1 x2, ..., xN). Пример линей ной дискриминантной функции для 1-го диагноза
Существенное практическое зна чение имеет разделение на два диаг ноза (состояния) D1 и D2 (например, исправное и неисправное).Этот случай часто называется дихотомией или дифференциальной диагностикой.
При распознавании двух состояний в качестве разделяющей функции можно принять разность соответствующих дискриминантных функций
Для повышения надежности распознавания применяют «по роги чувствительности»
Линейные разделяющие функции. Один из важнейших классов разделяющих функций связан с линейными дискриминантными функциями.
Методы распознавания с помощью линейных разделяющих функций назы ваются линейными методами разделения. Диагнозы, для которых возможно такое распознавание, считаются линейно-разделимыми.
Разделяющую функцию при диагностике на два состояния можно представить в виде скалярного произведения
Где – весовой коэфициент
Условия разделения (решающее правило)
Разделяющая поверхность является плоскостью в (N + 1)-мерном пространстве или гиперплоскостью.
В практических задачах области диагнозов характеризуются обучающими последовательностями, т. е. некоторым числом объек тов с заранее установленным диагнозом. В связи с этим выполне ние условий линейной разделимости проверяется по обучающей выборке. Однако формулируемые ниже условия, естественно, от носятся ко всей области диагноза. Так как условия разделения носят детерминистский характер:
то подобное разделение возможно, если области диагнозов не пере секаются. Так как условия представляют собой строгие не равенства, то не допускается возможность касания областей. Если внутри области диагноза имеется полость или область состоит из двух замкнутых подобластей, то она не является односвязной. Достаточное условие линейной раз делимости двух непересекающихся областей диагноза состоит в следующем: области диагноза должны быть выпуклыми обла стями. Напомним, что область называется выпуклой, если отрезок прямой, соединяющий две произвольные точки об ласти, не выходит за ее пределы. Указанное условие можно ос лабить, относя требование выпуклости только к части поверхности области, более «близкой» к другой области.
Теорема о линейном разделении содержит необходимое и до статочное условие линейной разделимости. Эта теорема формули руется следующим образом: линейное разделение областей воз можно, если существует хотя бы одно направление, проекции областей на которое не перекрываются. Проекцией области на на правление называется геометрическое место проекций всех точек области на данное направление.
2. РАЗДЕЛЕНИЕ В ДИАГНОСТИЧЕСКОМ ПРОСТРАНСТВЕ
Ранее рассматривались линейные разделяющие функции. Во многих случаях можно получить эффективное разделение (рас познавание), используя разделяющие функции более сложного вида.
Разделяющая функция общего вида и диагностическое про странство. Рассматривается распознавание образов двух классов (диагнозов D1 и D2)с помощью разделяющей функции общего вида
где х — вектор, изображающий объект в пространстве признаков.
Построение разделяющей функции.
Разделяющая функция будет построена, если определены коэффициенты Xt. Эти коэффи циенты могут быть найдены в процессе обучения с помощью показа образцов из обучающей последовательности. Наиболее простой способ — использование алгоритмов для линейной разделяющей функции в диагностическом пространстве.
Использование диагностических комплексов (симптомов). Один из важных способов преобразования пространства признаков в ди агностическое пространство — использование логических функ ций. Очень часто диагностическое значение имеет не наличие или отсутствие какого-либо признака, а появление или непоявле ние некоторого комплекса признаков.
Метод трубок дает некоторые правила, с помощью которых можно образовать диагностически ценные комплексы признаков. Объект описывается простыми признаками х1 х2, . . ., хп и представляет собой одну из вершин n-мерного единичного куба, 1 —наличие признака, 0 — отсутствие признака. Различаются два состояния D1 и D2. Для образования характерного для каждого состояния комплекса признаков исполь зуются объекты из обучающих последовательностей.
Если х0 — некоторый объект (точка в пространстве призна ков), то трубкой c центром в точке х0 и ради усом r называется множество точек, для которых расстояние до центра
Признаки считаются существенными, если частота их появления
В практических расчетах можно принимать б0 = 0,3 и б1 = 0,7.
Процесс распознавания состоит в построении трубок. В трубку могут входить объекты, имеющие комплекс определенных признаков, находящийся в «окрестности» центра трубки.
Трубка называется чистой, если в нее входят некоторые из объектов данного состояния и не входят объекты другого состоя ния. Предъявленный для распознавания объект относится к со стоянию D1 если он входит в трубки состояния D1 и не входит в трубки состояния D2.
В настоящее время достаточно эффективные общие процедуры отыскания диагностически цен ных комплексов отсутствуют, однако часто инженерные и интуи тивные соображения, особенно в задачах технической диагностики, помогают найти диагностически ценные комп лексы и существенно снизить размерность диагностического про странства. Отметим также методы теории подобия, позволяющие образовывать безразмерные комплексы признаков.
- МЕТОД ПОТЕНЦИАЛЬНЫХ ФУНКЦИЙ И МЕТОД ПОТЕНЦИАЛОВ
Метод потенциальных функций является развитием идеи преобразования пространства признаков. В настоящее время метод потенциальных функций можно считать одним из наиболее разработанных и математически обоснованных методов распоз навания образов (классов, диагнозов, состояний).
Основы метода потенциальных функций и метода потенциалов. В качестве дискриминантных функций f(х) для диагноза D1 в пространстве признаков в рассматриваемых методах выбираются функции, имеющие наибольшее значение для точек этой области и убывающие по мере удаления от нее. Подобным свойством обла дает потенциал точечного заряда, что и дало название методам.
Метод потенциальных функций развит для разделения на два состояния (дифференциальная диагностика, дихотомия).
Диагнозы (классы) Dl и D2 считаются непересекающимися, т. е. точка х может входить только в один из указанных классов. Если известна потенциальная функция К (х, у), которую условно можно рассматривать как «потенциал» в точке х от источника в точке у, то при соответствующем выборе точек х1 и х2 можно построить разделяющую функцию. Потенциальная функция зависит от расстояния между точками:
К(х,у) = К(\х-у\).
Метод потенциалов. В этом методе для построения дискриминантных функций также используются потенциальные функ ции К (х,у). Однако они получаются не в результате последова тельной (рекуррентной) процедуры, как в методе потенциальных функций, а строятся на основе имеющейся предварительной ин формации. Алгоритм построения является не самообучающимся, как в методе потенциальных функций, а заранее выбранным, детерминированным. Однако простота метода делает его привле кательным для практических приложений.
По физическому смыслу представляет собой потенциал в точке х1 от источника (заряда) в точке x2. Другой метод образования дискриминантных функций состоит в использовании среднего значения потенциальной функции
Алгоритм распознавания является обычным при использовании дискриминантных функций.
МЕТОД СТОХАСТИЧЕСКОЙ АППРОКСИМАЦИИ
Этот метод, примени тельно к проблеме распознавания и ряду смежных проблем, поз воляет оптимизировать процесс разделения в пространстве приз наков.
Ранее было показано, что разделение на два состояния (класса, диагноза) в пространстве признаков может быть сведено к построению разделяющей функции f (х) и исполь зованию правила решения

Можно усилить требования к функции потерь, считая, что она должна быть выпуклой (функцией с положительной кривизной). Построение разделяющей функции, минимизирующей погрешность приближенного решения, является оптимизацией процесса разделе ния в пространстве признаков. Однако применение метода мини мальной погрешности в его классической форме встречает серьез ные затруднения. Часть из них связана с тем, что плотность рас пределения р (х) обычно неизвестна и имеются только отдельные значения , входящие в обучающую последовательность.
В такой ситуации оказывается целесообразным применение ме тода стохастической аппроксимации.
Основной принцип сложной итерации состоит в том, что после дующее приближение зависит не от одного, а от нескольких пре дыдущих приближений.
Домашнее задание: § конспект.
Закрепление материала:
Ответьте на вопросы:
- На чем основаны методы разделения в пространстве призна ков?
- Опишите пространство признаков. Чем эта система может быть охарактеризована?
- В чем состоит условие компактности?
- Дайте пояснение линейному методу разделения.
- Приведите достаточное условие линейной раз делимости двух непересекающихся областей. Приведите пример.
- В каком случае может быть построена разделяющая функция?
- Опишите метод трубок, который дает некоторые правила, с помощью которых можно образовать диагностически ценные комплексы признаков.
- Поясните физический смысл метода потенциалов.
Литература:
Амренов С. А. «Методы контроля и диагностики систем и сетей связи» КОНСПЕКТ ЛЕКЦИЙ -: Астана, Казахский государственный агротехнический университет, 2005 г.
И.Г. Бакланов Тестирование и диагностика систем связи. - М.: Эко-Трендз, 2001.
Биргер И. А. Техническая диагностика.— М.: «Машиностроение», 1978.—240,с, ил.
АРИПОВ М.Н , ДЖУРАЕВ Р.Х., ДЖАББАРОВ Ш.Ю. «ТЕХНИЧЕСКАЯ ДИАГНОСТИКА ЦИФРОВЫХ СИСТЕМ» -Ташкент, ТЭИС, 2005
Платонов Ю. М., Уткин Ю. Г. Диагностика, ремонт и профилактика персональных компьютеров. -М.: Горячая линия - Телеком, 2003.-312 с: ил.
М.Е.Бушуева, В.В.Беляков Диагностика сложных технических систем Труды 1-го совещания по проекту НАТО SfP-973799 Semiconductors. Нижний Новгород, 2001
Малышенко Ю.В. ТЕХНИЧЕСКАЯ ДИАГНОСТИКА часть I конспект лекций
Платонов Ю. М., Уткин Ю. Г.Диагностика зависания и неисправностей компьютера/Серия «Техномир». Ростов-на-Дону: «Феникс», 2001. — 320 с.
PAGE \* MERGEFORMAT 5
МЕТОДЫ РАЗДЕЛЕНИЯ В ПРОСТРАНСТВЕ ПРИЗНАКОВ