Оптимизация потока в транспортной сети
Министерство транспорта Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
Ульяновское высшее авиационное училище
гражданской авиации (институт)
Кафедра УВД и навигации
Курсовая работа
По дисциплине теория УВД
Тема: «Оптимизация потока в транспортной сети»
Вариант №77
Выполнил: курсант учебной группы
Проверил: к.п.н., доцент кафедры УВД и Н
Содержание:
- Введение……………………………………………………...….3
- Исходные данные…………………………………………….....7
- Расчетная часть……………………………………………….....9
- Заключение……………………………………………………...30
- Список литературы…………………………………………..…38
Введение
Система ОрВД- система, обеспечивающая организацию воздушного движения путем комплексного объединения возможностей людей и информации, технологии, средств и служб на основе использования бортовых, наземных и космических систем связи, навигации и наблюдения.
Основной целью системы организации воздушного движения (ОрВД) является наиболее эффективное использование воздушного пространства, поиск новых условий функционирования систем повышающих безопасность и экономичность. Эффективность напрямую зависит от оптимизации.
Понятие оптимизации связано с поиском или созданием чего-то наилучшего в определенном смысле.
Оптимизация – процесс нахождения оптимума (глобального максимума или минимума) определённой функции или выбора наилучшего (оптимального) варианта из множества возможных при соблюдении некоторых ограничений.
Оптимизировать процесс функционирования системы - значит найти и поставить такие условия (значения параметров процесса), при которых наиболее полно проявляется то или иное свойство системы; разработать оптимальный план полетов - создать такой план, который бы наи�более полно удовлетворял некоторым требованиям, например, заявленным авиакомпаниями времени и количеству вылетов; спроектировать оптималь�ный маршрут вылета в районе аэродрома - такой маршрут, который бы наи�более полно удовлетворял требованиям, например, безопасности и экономичности. Чтобы указать, в каком же смысле искомое решение должно быть оптимально, при постановке задачи оптимизации вводится оптимизируемый критерий (критерий оптимизации).
В системе УВД на разных этапах функционирования в качестве критериев могут выступать такие показатели, как
- пропускная способность зоны УВД или предельно до�пустимая интенсивность воздушного движения,
- ожидаемая частота потенци�ально конфликтных ситуаций,
- показатель сложности УВД в той или иной зо�не,
- показатели отклонения от запланированной программы полета ВС в зоне ответственности диспетчера.
Критерий отражает цели оптимизации и, как правило, может быть выражено количественно. Под критерием оптимизации можно понимать некоторый показатель функционирования системы, который выбирается главным при постановке задачи поиска наилучшего решения.
Обобщенный алгоритм исследования и оптимизации включает:
- обоснование цели исследования и представления ее в виде показателей эффективности или группы таких показателей и их свертки,
- построение возможно полной математической модели процесса и формулировку конкретной задачи оптимизации или их совокупности,
- выбор метода исследования. Решение конкретных задач оптимизации или их совокупности,
- анализ математической модели и учет изменений параметров, условий или целей,
- коррекцию решения задач с учетом анализа модификации математической модели,
- выявление общих тенденций в вариациях моделей и решений.
В общем виде задачу оптимизации можно сформулировать так: среди допустимых значений параметров процесса из набора X = ( найти такие, при которых критерий I достигает своего наибольшего (наименьшего) значения. Обобщенная математическая модель запишется следующим образом :


где I – критерий оптимизации;
f(X) – целевая функция, т.е. функция, указывающая зависимость критерия оптимизации от значения параметров X;
X = ( - набор из n-параметров процесса, которыми можно управлять при поиске (создании) оптимального решения;
- функции ограничения, число которых m;
– некоторые постоянные величины выражающие количественные значения ограничений, знаки () подразумевают, что в записи ограничения вместо «» может быть или «», или «».
К классу потоковых задач (задач планирования потока на сетях) можно отнести следующую задачу: имеется система, модель которой может быть представлена в виде ори�ентированного графа. На вход системы поступает поток с некоторой ин�тенсивностью X. Пропускная способность элементов системы ограничена. Необходимо так спланировать поток ВС, чтобы не нарушались ограничения пропускной способности элементов системы и интенсивность потока была максимальной (или равной требуемой величине). Задача формулируется как задача распределения потока воздуш�ного движения из некоторого пункта s в пункт t по сети воздушных трасс, имеющих ограниченную пропускную способность. Могут быть добавлены и другие условия, ограничения и критерии распределения потока.
При употреблении слов «модель», «моделирование», «модельное описание» имеется ввиду выбор на этапе функционирования системы определенного исследуемого процесса и выявление именно тех особенностей, которые нас интересуют.
Моделирование – распространенный метод количественной или качественной оценки процессов в любых системах
Модель – это идеальный или материальный объект, который в некоторых условиях заменяет объект-оригинал.
Для моделирования транспортной сети будем использовать положения теории графов и сетей.
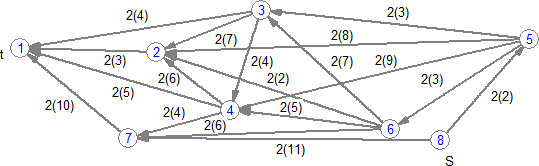
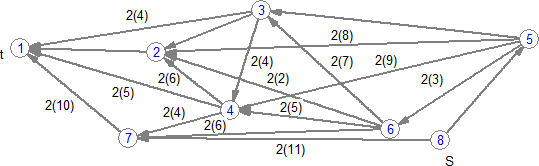
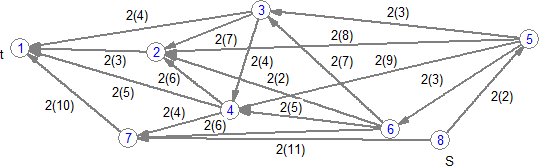
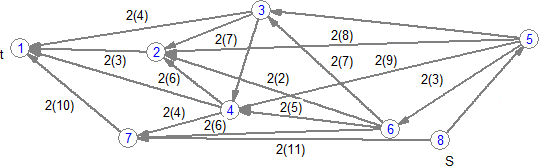
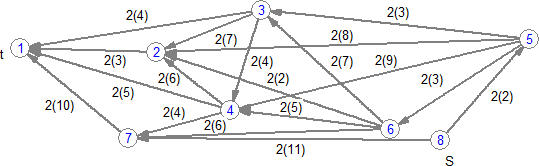
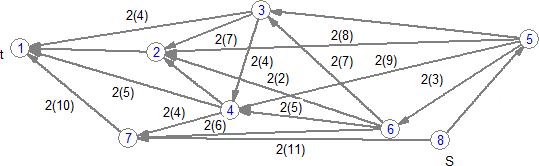
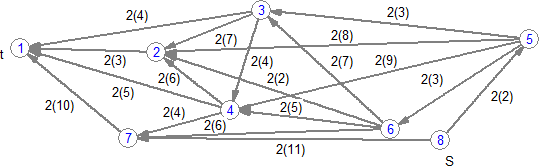
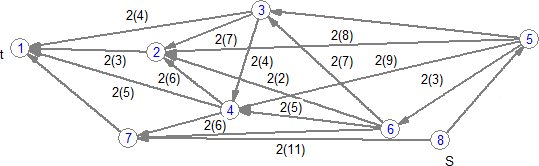
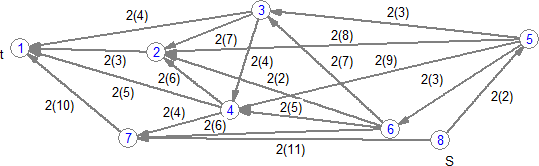
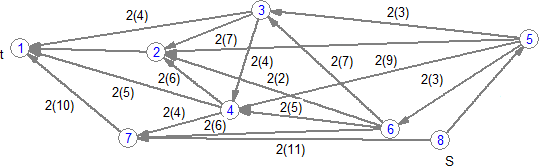
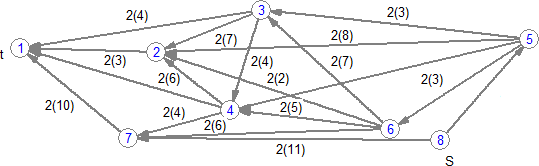
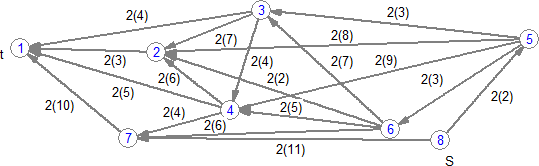
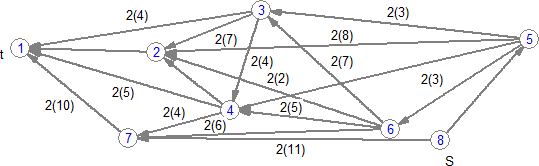
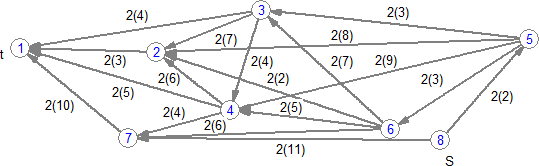
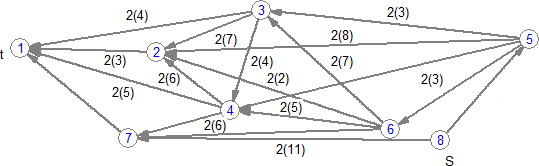
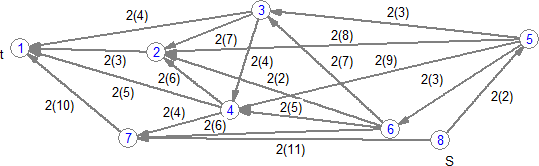
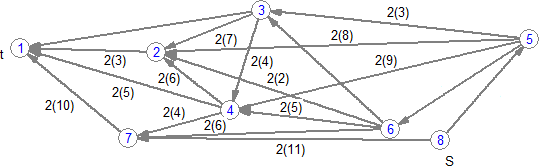
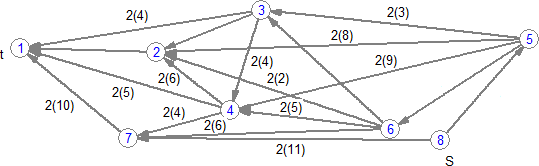
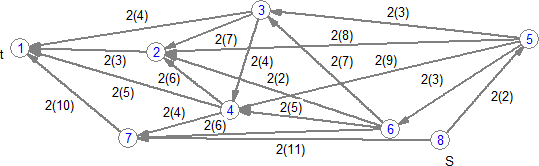
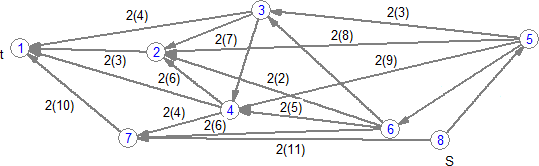
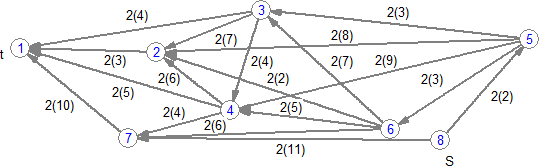
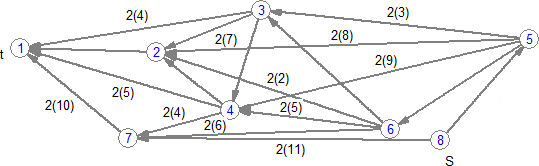
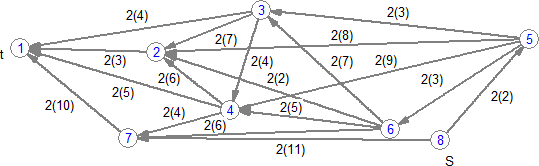
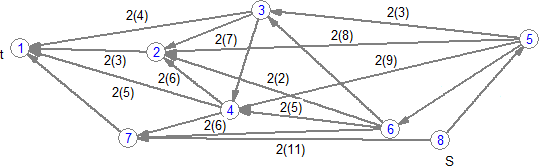
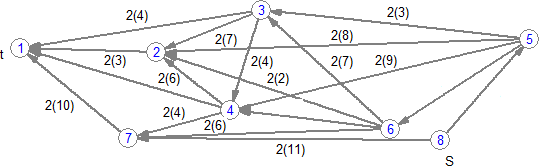
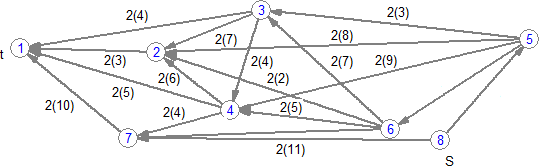
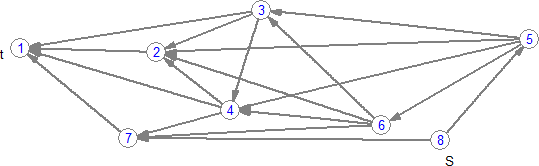
Граф – это модель системы объектов, объединенных между собой определенными отношениями. Объектам соответствуют вершины графа, связям – ребра, дуги. Ориентированный граф (орграф) – граф, у которого есть вход, выход, а стрелками указаны направления. Под моделью транспортной сети будем понимать ориентированный граф, в котором выделяется две вершины: s –исток и t –сток, а дугам присвоен вес, означающий пропускную способность.
Поток сети - совокупность объектов, транспортируемых по сети из s в t,причем эти объекты могут быть распределены по дугам сети различным образом.
Учитывая все вышесказанное, мы создадим свою транспортную сеть, где вершины будут различными аэропортами, ребра – маршрутами, S–аэропортом отправления, t – аэропортом назначения.
Цель работы : создание транспортной сети, нахождение оптимального пути прохождения ВС из S в t при соблюдении соответствия пропускной способности и интенсивности каждого участка транспортной сети, а также анализ транспортной сети на всех этапах функционирования системы (планирование, организация, непосредственное УВД).
Моделирование и расчетная часть:
Исходные данные: Матрица смежности сети
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
|
1
|
|
3
|
4
|
5
|
|
|
10
|
|
|
2
|
|
|
|
|
|
|
|
|
|
3
|
|
7
|
|
4
|
3
|
7
|
|
|
|
4
|
|
6
|
|
|
9
|
5
|
4
|
|
|
5
|
|
8
|
|
|
|
3
|
|
|
|
6
|
|
2
|
|
|
|
|
|
|
|
7
|
|
|
|
|
|
|
|
11
|
|
8
|
|
|
|
|
2
|
|
|
|
Начальная величина потока = 2; S=8, t=1.
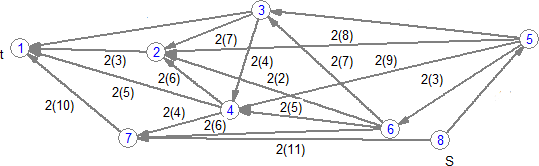
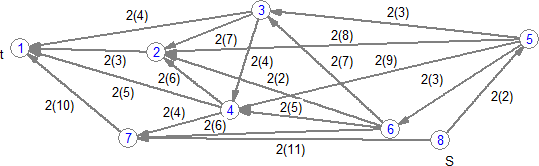
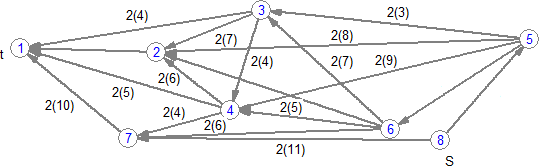
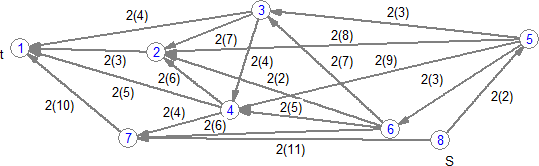
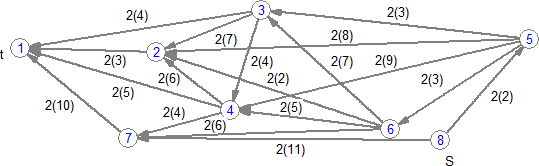
Модель транспортной сети: Ориентированный граф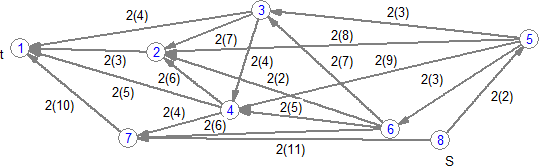
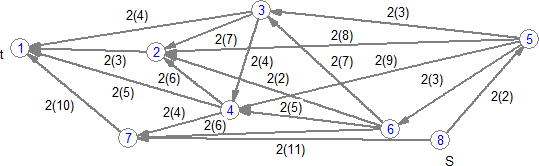
Пути:








Решение:
Цикл №1
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
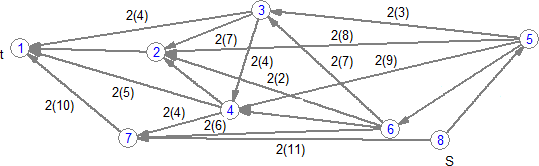
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-3 - 0
3-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
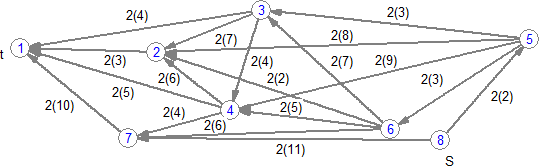
Цикл №2
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-3 - 0
3-2 - 0
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма
Цикл №3
Шаг 1. Рассмотрим сеть воздушных трасс.
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-3 - 0
3-4 - 0
4-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №4
Шаг 1. Рассмотрим сеть воздушных трасс.
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-3 - 0
3-4 - 0
4-2 - 0
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №5
Шаг 1. Рассмотрим сеть воздушных трасс.
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-3 - 0
3-4 - 0
4-7 - 0
7-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №6
Шаг 1. Рассмотрим сеть воздушных трасс.
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-2 - 0
2-1 – 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №7
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь 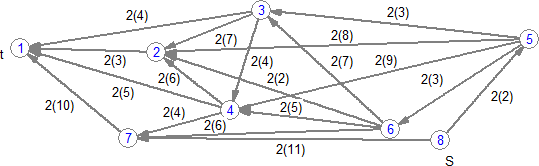
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-4 - 0
4-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №8
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-4 - 0
4-2 - 0
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №9
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-4 - 0
4-7 - 0
7-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №10
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-3 - 0
3-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №11
Шаг 1. Рассмотрим сеть воздушных трасс

Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-3 - 0
3-2 - 0
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №12
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-3 - 0
3-4 - 0
4-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №13
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-3 - 0
3-4 - 0
4-2 - 0
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №14
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-3 - 0
3-4 - 0
4-7 - 0
7-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №15
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-2 -
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №16
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-4 - 0
4-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №17
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-4 - 0
4-2 - 0
2-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №18
Шаг 1. Рассмотрим сеть воздушных трасс

Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-4 - 0
4-7 - 0
7-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №19
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-5 -
5-6 - 0
6-7 - 0
7-1 - 0
Нулевой путь не найден.
Конец работы алгоритма.
Цикл №20
Шаг 1. Рассмотрим сеть воздушных трасс
Выберем путь
Шаг 2. Строим орграф приращений
Шаг 3. Находим путь нулевой длины:
8-7 -
7-1 - 0
Нулевой путь найден.
Шаг 4. Находим приращение dP[S,t])
dP20 [St ()])(11,10) min=10;
dP20[St])= 10-2=8
Шаг 5. Находим новый поток
= 0+ dP20[S,t])
=2+8=10(ВС)
Конец работы алгоритма.
Общий потенциал сети
Интенсивность =2
Находим пропускную способность всей транспортной сети.
Общий поток, который может войти в сеть –S:
=2+11=13 ВС
Общий поток, который может выйти из сети – t:
=10+5+3+4=22 ВС
= [St(8,5,3,1)]+[St(8,7,1)]=12 ВС
Заключение
В результате была смоделирована и рассмотрена транспортная сеть и проведена оптимизация потока ВС. Транспортная сеть представляет собой часть воздушного пространства размерами: с севера на юг – 400 км, с запада на восток – 600 км (приблизительно).
Транспортная сеть:
В состав данной транспортной сети входят два аэродрома : аэродром вылета – Екатеринбург и аэродром назначения – Пермь (условно), 3 поворотных пункта-ППМ1,ППМ2,ППМ3;3 пункта обязательного донесения ПОД1,ПОД2,ПОД3.
В транспортной сети было выделено 20 маршрутов движения ВС с заданной пропускной способностью воздушных трасс:
Р1 “Екатеринбург-ПОД1-ППМ1-Пермь” протяженностью 1025 км;
Р2 “Екатеринбург-ПОД1-ППМ1-ППМ2-Пермь”протяженностью 1065 км;
Р3 “Екатеринбург-ПОД1-ППМ1-ПОД2- Пермь” протяженностью 1130 км;
Р4 “Екатеринбург-ПОД1-ППМ1-ПОД2-ППМ2-Пермь” протяженностью 1145 км;
Р5 “Екатеринбург-ПОД1-ППМ1-ПОД2-ПОД3-Пермь” протяженностью 1145 км;
Р6 “Екатеринбург-ПОД1-ППМ2-Пермь” протяженностью 1015 км;
Р7 “Екатеринбург-ПОД1-ПОД2-Пермь” протяженностью 1050 км;
Р8 “Екатеринбург-ПОД1-ПОД2-ППМ2-Пермь “ протяженностью 1065 км;
Р9 “Екатеринбург-ПОД1-ПОД2-ПОД3-Пермь” протяженностью 1065 км; Р10”Екатеринбург-ПОД1-ППМ3-ППМ1-Пермь” протяженностью 1115 км; Р11”Екатеринбург-ПОД1-ППМ3-ППМ1-ППМ2-Пермь” протяженностью 1155 км; Р12”Екатеринбург-ПОД1-ППМ3-ППМ1-ПОД2-Пермь” протяженностью 1220 км; Р13”Екатеринбург-ПОД1-ППМ3-ППМ1-ПОД2-ППМ2-Пермь” протяженностью 1220 км; Р14”Екатеринбург-ПОД1-ППМ3-ППМ1-ПОД2-ПОД3-Пермь“ протяженностью 1235 км; Р15”Екатеринбург-ПОД1-ППМ3-ППМ2-Пермь” протяженностью 1075 км; Р16”Екатеринбург-ПОД1-ППМ3-ПОД2-Пермь” протяженностью 1060 км; Р17”Екатеринбург-ПОД1-ППМ3-ПОД2-ППМ2-Пермь” протяженностью 1075 км; Р18”Екатеринбург-ПОД1-ППМ3-ПОД2-ПОД3-Пермь” протяженностью 1075 км; Р19”Екатеринбург-ПОД1-ППМ3-ПОД3-Пермь” протяженностью 1090 км; Р20”Екатеринбург-ПОД3-Пермь” протяженностью 720 км;
Наиболее эффективные маршруты: M20 “Екатеринбург-ПОД3-Пермь” (720 км); М6 “Екатеринбург-ПОД1-ППМ2-Пермь” (1015 км); М1 “Екатеринбург-ПОД1-ППМ1-Пермь” (1025 км).
Начальный поток составляет 2 ВС. Минимальный безопасный интервал -30 км. Данная транспортная имеет 1 зону ответственности, за которую несет ответственность диспетчер аэродрома Екатеринбург. Максимальный поток составляет 11 ВС, тем самым 1 диспетчер может справиться с ним. Не прибегая к услугам других диспетчеров мы избегаем дополнительных затрат, выполняя один из критериев эффективности – экономичность. По этому же принципу мы размещаем 1 РЛС на аэродроме Екатеринбург, ликвидируя затраты на использование лишних РЛС.
Анализируя полученную нами транспортную сеть мы выяснили что в данную транспортную сеть могут войти 13 ВС, пропускная способность на выходе составляет 22 ВС. Таким образом, максимальный поток ВС равен 12, который может быть обслужен в полученной транспортной сети в соответствии с установленными регламентами безопасности.
Данная транспортная сеть характеризуется наличием 4 пересечений воздушных трасс, большим количеством сходимости маршрутов и достаточно большим количеством поворотных пунктов(6).
Функционирование транспортной сети осуществляется на 3 этапах:
Организация
Планирование
Непосредственное УВД
Каждый из этапов имеет свои особенности функционирования, факторы, ограничения.
Рассмотрим каждый из этих этапов более подробно.
Этап организации ВД.
Данный этап является одним из самых важных в деятельности службы движения. На этапе организации осуществляется деление воздушного пространства на зоны ответственности диспетчеров, в соответствии с требованиями и правилами размещаются радиотехнические средства для полного обеспечения необходимых коммуникаций между экипажами ВС и наземными службами, обеспечивающими безопасное ВД, определяются размеры аэродромов. От эффективности мероприятий, проводимых на данном этапе, будут зависеть безопасность ВД и количество экономических затрат. Обозначим особенности данной транспортной сети: поворотные пункты, загруженность отдельных участков. Все это оказывает непосредственное влияние на безопасность и эффективность функционирования всей транспортной сети.
Транспортная сеть была смоделирована таким образом, что нам удалось добиться минимального значения пересечения трасс и снизить количество поворотных пунктов. Это позволяет уменьшить число конфликтных ситуаций и снизить загруженность диспетчера. Все это в совокупности влияет на эффективность нашей транспортной сети. Основываясь на данной транспортной сети, были организованы схемы и маршруты движения ВС по трассам, а так же схемы и маршруты движения прилетающих и вылетающих ВС в районе аэродрома.
Можно выделить два основных вида объектов: статические (не изменяют свое состояние в процессе управления), и динамические (изменяющие свои свойства в процессе управления).
Статические объекты в нашей транспортной сети – аэродром вылета Екатеринбург, и аэродром назначения – Пермь. Первый оборудован РТС; 3 пункта обязательного донесения (ПОД1,ПОД2,ПОД3) при пролете которых экипаж ВС обязан сообщать об этом диспетчеру УВД, что позволит контролировать движение ВС и повысить эффективность использования воздушного пространства транспортной сети ;3 поворотных пункта.
В роли динамических объектов-поток ВС. Начальный поток составляет 3ВС.
В ходе работы нами был определен общий потенциал сети. Он составляет 11 ВС - количество судов которое может быть обслужено с учетом соблюдения регламента безопасности.
Немаловажным на этом этапе важен правильный и ответственный подбор персонала.
2.Этап планирования.
Важнейшей задачей данного этапа, является анализ процессов выполненных на этапе организации в соответствие принятым критериям по пропускной способности воздушного пространства. Этап планирования создает предпосылки для осуществления функционирования транспортной сети с необходимым качеством.
Для достижения этой цели проводятся следующие мероприятия: производится анализ воздушной обстановки по конкретной динамике, решается задача по построению и оптимизации суточного плана, коррекция суточного плана с учетом изменившейся обстановки, разработка альтернативных планов и т.д.
Также важной частью этапа планирования является назначение запасных аэродромов и альтернативных планов полета.
При анализе данной транспортной сети следует отметить, что она не является масштабным изображением реальной зоны воздушного пространства. Длина каждого маршрута рассчитывалась исходя из правил продольного эшелонирования, соблюдая интервал между ВС в 30км. ВС проходят маршруты друг за другом. В данной транспортной сети расстояние между контрольными точками максимально, что обеспечивает дополнительное расстояние между ВС, тем самым это уменьшает риск конфликтных ситуаций и сближения ВС и повышает уровень безопасности полетов. Данная транспортная сеть спланирована таким образом, что при появлении метеорологических факторов, влияющих на безопасность ИВП, ВС может обойти его, так как расстояние между воздушными трассами позволяет это сделать.
Маршрут “Екатеринбург-ППМ1-ПОД1-Пермь” является наикратчайшим. Его протяжённость составляет 390км. По этому маршруту ВС тратит меньше времени и топлива, т.е. данный путь является более эффективным(экономичным и безопасным).Однако на участке маршрута “ППМ1-ПОД1” пропускная способность меньше начальной, следовательно по этому маршруту мы можем распределить только 2 ВС. По маршруту “Екатеринбург-ППМ1-ПОД1-ППМ3-Пермь” протяженностью 570 км распределяем также 2 ВС. Маршрут “Екатеринбург-ППМ1-ПОД1-ППМ3-Пермь” протяженностью 630 км может пропустить 3 ВС. И маршрут ”Екатеринбург-ПОД2-ППМ2-ПОД1-Пермь” протяженностью 750 км может пропустить 4 ВС, с возможностью увеличения первоначального потока на 7 ВС на участке ”Екатеринбург-ПОД2”. Это дает запас времени на принятие решения диспетчером во внештатных ситуациях. Из этого следует, что данный участок используется почти максимально эффективно. Тем самым мы распределили поток ВС по 4 маршрутам, обеспечив необходимую безопасность и эффективность использования транспортной сети.
Альтернативой может служить маршрут “Екатеринбург-ППМ1-ПОД1-Пермь “. Его протяженность-750км. В случае возникновения чрезвычайных ситуаций, сложных метеоусловий он будет являться хорошей альтернативой маршруту
“Екатеринбург-ПОД2-ППМ2-ПОД1-Пермь”,однако у первого большее количество поворотных пунктов ,что будет влиять на загруженность диспетчера.
Важной частью этапа планирования является назначение запасных аэродромов и альтернативных планов полета (в случае экстремальной или аварийной ситуации). В нашем случае, расстояние от пункта вылета в пункт прилета минимальное, поэтому в случае аварийной ситуации или осложнение метеорологических условий ВС сможет вернуться на аэродром вылета(Екатеринбург).
3.Этап непосредственного УВД.
Именно на этом этапе присутствует непосредственное управление и контроль потоками воздушных судов (воздушного движения) с целью предотвращения столкновений ВС в воздушном пространстве и на территориях аэродромов. То есть, специалист должен проводить постоянный анализ и контроль состояния динамической воздушной обстановки и осуществлении непосредственного управления процессом выполнения полетов для установления и поддержания регламентированного порядка движения ВС на аэродроме и в воздушном пространстве с обеспечением требований безопасности, регулярности и экономичности полетов.
Организация нашей транспортной сети позволяет диспетчеру выполнять технологические операции без лишних технологических операций, а, следовательно, без дефицита времени на принятие решений, что значительно повышает безопасность полетов. Важное значение играет количество рубежей приема – передачи. Чем их меньше, тем легче работать диспетчеру. В данной транспортной сети минимальное количество таких рубежей.
Управление воздушным движением делится на оперативное (текущее) и тактическое.
При тактическом УВД мы воспринимаем информацию и анализируем её. То есть информация является статическим объектом. В нашем случае происходит передача информации о ВС при пересечении пунктов обязательного донесения.Так как наша сеть характеризуется наличием РЛС , диспетчеру не надо подсчитывать удаление и азимут на заданной высоте, следовательно снижается загруженность диспетчера, величина ошибки, время потребное для принятия решения .Так же при тактическом УВД разрабатывается стратегия выполнения диспетчером технологических операций (может рассматриваться план действий при возникновении внештатных ситуаций).
При оперативном УВД происходит непосредственное управление ВД, внесение корректировок и т.д.В нашем случае диспетчер управляет потоком из 11 ВС. Для эффективного функционирования транспортной сети следует рассмотреть загруженность диспетчера, которая влияет непосредственно на пропускную способность. Существуют факторы, влияющие на загруженность диспетчера, такие как: интенсивность ВД, уровень автоматизации процессов УВД. В нашем случае стоит обратить внимание на участки «ППМ1-ПОД1 » и «ПОД2-ППМ2», где значение пропускной способности будет соответствовать значению потока ВС,что в свою очередь требует повышенного внимания диспетчера. Существующая проблема высокой загруженности диспетчера решается применением РЛС.
В ходе исследования нашей транспортной сети мы определили, что она имеет среднюю протяжённость. Наличие РЛС на аэродроме вылета покрывает все пространство нашей транспортной сети, следовательно дополнительные РТС не нужны, т.к. этого количества РТС хватает для того чтобы наблюдать за складывающейся динамической обстановкой. Проанализировав модель мы выявили 4 самых оптимальных маршрута: “Екатеринбург-ППМ1-ПОД1-Пермь”; “Екатеринбург-ППМ1-ПОД1-ППМ3-Пермь”; “Екатеринбург-ПОД2-ППМ2-ППМ3-Пермь”; ”Екатеринбург-ПОД2-ППМ2-ПОД1-Пермь”. По данным путям обеспечивается безопасность и эффективность ,т.к. оба маршрута характеризуются наименьшими протяжённостями и малым числом поворотных пунктов. В случае возникновения опасных погодных явлений, чрезвычайных ситуаций мы будем вынуждены использовать другой маршрут “Екатеринбург-ППМ1-ПОД1-Пермь “.Этот маршрут не длиннее ,однако количество поворотных пунктов больше ,что повышает загруженность диспетчера. Но это будет являться платой за безопасность полётов.
Данная транспортная сеть была оптимизирована таким образом, что максимальный возможный поток был распределен по выгодным маршрутам.
Подводя итог в данной работе, следует дать краткую характеристику процессов на каждом этапе функционирования транспортной сети.
Каждый этап (организация, планирование, непосредственное УВД) был декомпозирован до составных частей и рассмотрен в соответствии с особенностями данной транспортной сети. Требовалось так спланировать поток в системе (в транспортной сети), чтобы не нарушались ограничения пропускной способности элементов системы, и интенсивность потока была максимальной (или равной требуемой величине). То есть необходимо решение задач оптимизации данной системы на основе заранее заданных критериев и ограничений. Были определены следующие критерии: безопасность, экономичность, регулярность. Все критерии во взаимной связи оказывают влияние на все этапы функционирования данной транспортной сети. Показатель пропускной способности на входе равный 15 ВС отличается от показателя пропускной способности на выходе равный 11 ВС. Следовательно наша транспортная сеть не является оптимальной. Следует принять какие-то меры по оптимизации ,например участки «ППМ1-ПОД1 » и «ПОД2-ППМ2» работают максимально эффективно(обслуживают максимально возможное кол-во ВС с учетом регламента безопасности), в связи с этим, можно провести работы по совершенствованию наземной инфраструктуры аэропорта (РД, перрон и т.д.) для более быстрого обслуживания ВС.
Список используемой литературы:
- Крыжановский Г.А. Введение в прикладную теорию управления воздушным движением: Учебник для вузов гражданской авиации. – М.: Машиностроение,1984.
- Основы теории управления воздушным движением: учеб. пособие/сост. В.А. Карнаухов. – Ульяновск: УВАУ ГА(И), 2010.
- Теория графов и сетей при моделировании процессов УВД: учеб. пособие/сост. В.А. Карнаухов. – Ульяновск: УВАУ ГА(И), 2009.
- Глухих И.Н. Основы теории УВД. В 2-х ч. Ч. 1. – Ульяновск: УВАУ ГА, 1999.
- Теория УВД: методические указания по выполнению курсовой и контрольной работ / сост. В. А. Карнаухов. – Ульяновск: УВАУГА(И), 2010.
255
510
180
255
140
435
405
385
180
180
210
020
035
045
055
125
165
155
115
100
060
155
145
135
075
140
135
125
160
120
150
130
065
090
150
170
145
165
160
175
Оптимизация потока в транспортной сети