Підвищення точності
Підвищення точності
До загальних методів підвищення точності САУ належать такі:
1. Збільшення коефіцієнта передачі прямого ланцюга регулювання.
2. Підвищення порядку астатизму.
3. Застосування регулювання за похідними від помилки.
4. Застосування інваріантних систем.
5. Застосування неодиничного зворотного зв'язку.
Розглянемо послідовно ці методи.
6.2.1. Збільшення коефіцієнта передачі прямого ланцюга регулювання
Збільшення коефіцієнта передачі прямого ланцюга регулювання є одним з найбільш простих і універсальних методів зменшення помилки, що встановилася. Практично збільшити загальний коефіцієнт передачі прямого ланцюга регулювання можна за рахунок введення різноманітних підсилювачів сигналів. У деяких випадках вдається збільшити коефіцієнт підсилення за рахунок підвищення коефіцієнта передач окремих елементів, наприклад, чутливих елементів, підсилювачів-перетворювачів, редукторів тощо.
Підвищення коефіцієнту передачі прямого каналу регулювання приводить до зниження помилки, що встановилася, практично в усіх типових режимах роботи, що випливає з отриманих у главі 5 формул помилок, що встановилися (5.17), (5.19), (5.21), де цей коефіцієнт завжди входить у знаменник.
Однак збільшення загального коефіцієнта передачі прямого ланцюга регулювання завжди наближає систему до втрати сталості. Тому максима льно можлива величина коефіцієнта практично обмежується вимогою забезпечити потрібний запас сталості системи, що надто звужує можливості цього методу. Саме так відбивається протиріччя між прагненням забезпечити погрібну точність і в той же час задовольнити вимоги сталості.
6.2.2. Підвищення порядку астатизму
Підвищення порядку астатизму використовується для усунення помилок, що встановилися, у різних типових режимах роботи, бо в цьому випадку все більш старші коефіцієнти помилок стають рівними нулю (5.27).
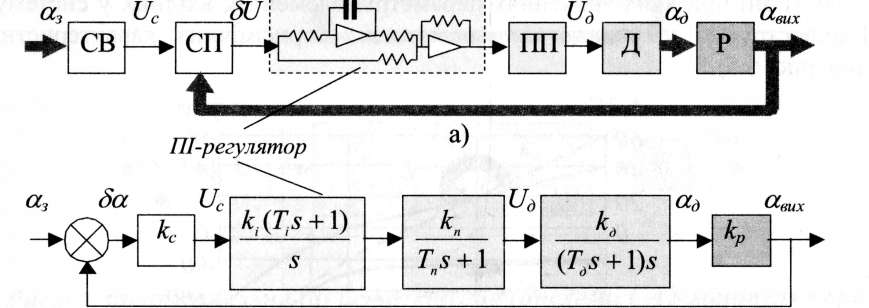
На практиці підвищення порядку астатизму здійснюється введенням у прямий канал регулювання інтегруючих елементів (рис. 6.2).

Рис. 6.2. Структурна схема вихідної (а) і перетвореної (б) систем
Еквівалентна передаточна функція такої системи:
що приводить до збільшення показника а у знаменнику формули загально го вигляду передаточної функції (5.16).
Підвищення порядку астатизму за рахунок введення інтегруючих елементів приводить до підвищення точності системи в цілому, оскільки інтегруючі елементи, як відомо, здійснюють інтегральне регулювання, тобто реалізують пропорційну залежність між швидкістю модифікації впливу, що управляє, та помилкою. Проте цьому методу притаманні і нега тивні наслідки: зниження швидкодії системи та наближення її до межі втрати сталості. Доведемо це.
Нехай у вихідній системі з пропорційним регулюванням (схема рис. 6.2,а) помилка починає зростати за лінійним законом (t) = Vt (рис. 6.3). Тоді згідно з таким же законом буде створюватися і керуючий вплив y1(t) = k1 Vt (лінія 1). Після введення інтегруючого елементу з кi=к1 маємо y1 (t) = (лінія 2). З рис. 6.3 очевидно зниження швидкодії системи при введенні інтегруючого елемента в прямий канал регулювання.
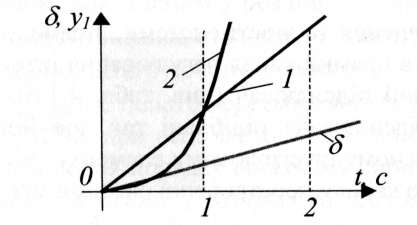
Рис. 6.3. Реакція вихідної (1) та перетвореної (2) систем
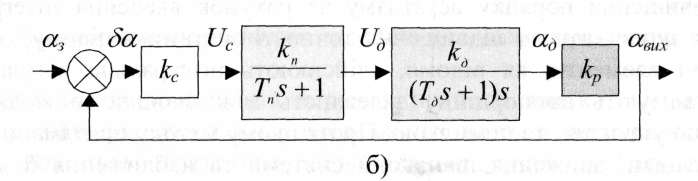
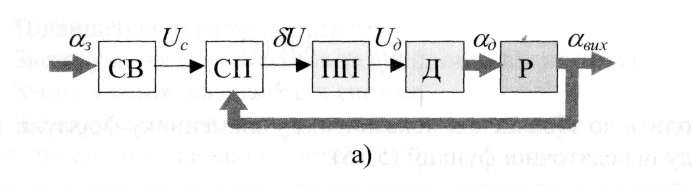
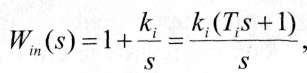
Тепер розглянемо вплив введення інтегруючих елементів на точність та сталість систем на прикладі системи дистанційного управління маніпулятором, функціональну схему якого наведено на рис. 6.4, а. Система складається з сельсин-вимірювального приладу (СВ) і сельсин-приймача (СП), що працюють у трансформаторному режимі, підсилювача-перетворювача (ПП), двигуна (Д) постійного струму і редуктора (Р). На схемі рис.6.4,а електричні зв'язки показані тонкими стрілками, а механічні - подвійними стрілками.
Нехай структурна схема вихідної системи (при однакових коефіцієнтах передачі сельсинів) має вигляд, наведений на рис. 6.4, б. Тоді передаточна функція прямого каналу регулювання:
де ko=kcknkdkp - загальний коефіцієнт передачі системи
Оскільки система є астатичною 1-го порядку, то коефіцієнт k0 називається добротністю системи по швидкості, а перші три коефіцієнти помилок, що визначаються за залежностями (5.27), дорівнюють відповідно:
Оскільки система є астатичною 1-го порядку, то коефіцієнт k0 називається добротністю системи по швидкості, а перші три коефіцієнти помилок, що визначаються за залежностями (5.27), дорівнюють відповідно:

Для підвищення точності системи, а саме, ліквідації швидкісної по милки, введемо в прямий канал регулювання інтегруючий елемент, напри клад, інтегруючий підсилювач (див. табл. 4.1,6). Нехай параметри цього інтегруючого підсилювача підібрані так, що його передаточна функція відповідає ідеальному інтегруючому елементу: W(s)=1/s. Тоді передаточна функція прямого каналу перетвореної системи має астатизм 2-го порядку:
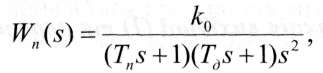
де к0 - добротність за прискоренням, а передаточна функція за помилкою
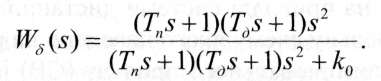
Розрахуємо перші три коефіцієнти помилки для перетвореної системи:
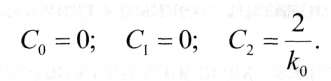

Таким чином, в результаті підвищення порядку астатизму вдалося ліквідувати швидкісну складову помилки тому, що С2=0. Проте характеристичне рівняння перетвореної системи набуває вигляду:
Відсутність одного з членів характеристичного рівняння свідчить про структурну несталість системи, що означає неможливість досягнення сталості ані при яких значеннях параметрів елементів, вхідних у систему. Проілюструємо це явище за допомогою логарифмічних характеристик (див. рис. 6.5).
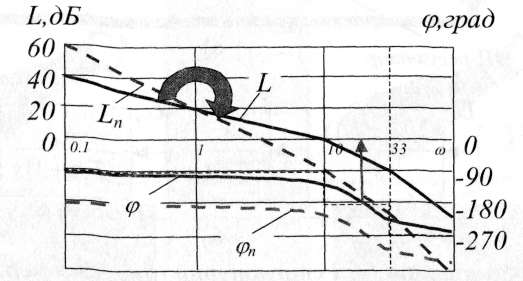
Рис. 6.5. Вплив підвищення порядку астатизму на сталість системи
Графіки ЛАЧХ і ЛФЧХ вихідної системи (лінії L і відповідно) побудовані для наступних параметрів: к0= 10, Тд= 0.1 с, Тп = 0.03 с. Побудова виконувалася за методом, викладеним у розділі 5.2. Аналіз показує, щосистема є сталою і має достатній запас сталості за амплітудою (&12дБ і зафазою - 50°). Після введення інтегруючого елемента положення характеристик змінилося (лінії Ln і ). Сталість перетвореної системи не може бути досягнута, бо графік ЛФЧХ при всіх частотах розташовується нижче 180 . Відзначимо, що підвищення порядку астатизму спричинює повертання графіку ЛАЧХ навколо точки [=1, L=20lgk0J на -20 дБ/дек.
Тому для підвищення порядку астатизму застосовують ізодромні пристрої, що здійснюють регулювання за пропорційним і інтегральним законами. їх називають також І-регуляторами. Застосування ізодромних пристроїв дозволяє підвищити точність системи за рахунок підвищення порядку її астатизму без помітного погіршення сталості. Зі структурної схеми ПІ-регулятора (рис. 6.6) можна отримати його передаточну функцію:
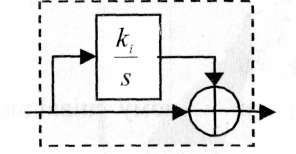
Рис. 6.6. Структурна схема ПІ-регулятора
де Ті =1/кі - постійна часу ізодромного пристрою.
Для досягнення максимального ефекту, ПІ-регулятор вбудовують в канал регулювання якомога ближче до порівняльного пристосування, тобто вгору за течією сигналу. Наприклад, для розглядуваного приводу маніпулятора ПІ-регулятор необхідно встановити одразу після сельсин - приймача, що виконує в системі роль порівняльного пристрою (рис. 6.7).
б)
Рис.6.7. Функціональна (а) і структурна (б) схеми перетвореної САУ маніпулятора з ПІ-регулятором
Відзначимо, що проміжні функціональні елементи реальної системи, які забезпечують роботу сельсинів, на схемі не показані і в математичних моделях не враховуються.


показує, що перші два коефіцієнти помилок дорівнюють нулю, а третій: Сз=2/к0кі. Таким чином, підвищення точності досягнуто за рахунок усунення швидкісної помилки. Разом із тим, перетворена система має характеристичне рівняння такого вигляду:
що підтверджує можливість досягнення сталості при певному співвідношенні параметрів.
На рис.6.8 представлений інтерфейс прикладної програми, де зафіксований момент функціонування двох систем: зліва - за структурною схемою рис.6.4,6, справа - за структурною схемою рис.6.7,б. Обидві САУ мають однакові параметри і відрізняються тільки наявністю пропорційно - інтегрального регулятора з передаточною функцією (6.2).
Тестування обох систем проведено у статичному режимі, тобто на вхід, що управляє, для обох систем поданий однаковий сигнал (лінія 1 на зображенні осцилографів), який відповідає бажаному положенню маніпулятора, що позначене трикутником у полі анімації руху.
Наочно можна переконатися, що система з ПІ-регулятором суттєво втрачає у швидкодії: перехідний процес вихідної системи закінчився за 0,8 с, тоді як для перетвореної системи він закінчується за 1,7 с. Крім того, система з ПІ-регулятором наближається до межі сталості, про що свідчить значно більше перерегулювання (лінія 2) перехідного процесу.
Позитивні сторони застосування ПІ-регуляторів, які полягають у суттєвому підвищенні точності за рахунок зменшення коефіцієнтів помилки, продемонстровані на рис.6.9, де зафіксований момент регулювання двох САУ при режимі роботи з постійною швидкістю.
На вхід, що управляє, для обох систем подається однаковий сигнал, який відповідає бажаній швидкості руху 0,5 рад/с (лінія 1 на рис.6.9). Такий режим роботи крім тестування систем, має також і практичне застосування, наприклад, при автоматичному зварюванні, фарбуванні необхідно забезпечити постійну швидкість руху робочого органу.
кий режим роботи крім тестування систем, має також і практичне застосу-
вання, наприклад, при автоматичному зварювайні, фарбуванні необхідно
забезпечити постійну швидкість руху робочого органу.
Моделювання підтверджує, що обидві системи, після закінчення пе-
рехідного процесу, рухаються з заданою швидкістю, але якщо для системи
з ПІ-регулятором помилка за положенням дорівнює нулю, то для вихідної
системи вона є постійною = 3,5°. Помилку можна спостерігати на ані-
маційному полі під час моделювання.
кий режим роботи крім тестування систем, має також і практичне застосу-
вання, наприклад, при автоматичному зварювайні, фарбуванні необхідно
забезпечити постійну швидкість руху робочого органу.
Моделювання підтверджує, що обидві системи, після закінчення перехідного процесу, рухаються з заданою швидкістю, але якщо для системи з ПІ-регулятором помилка за положенням дорівнює нулю, то для вихідної системи вона є постійною = 3,5°. Помилку можна спостерігати на анімаційному полі під час моделювання.
Підвищення точності