Исследование кривошипно-ползунного механизма
Министерство образования и науки РФ
Государственное образовательное учреждение высшего
профессионального образования
“Тихоокеанский государственный университет”
Кафедра: “Детали машин ”
Исследование кривошипно-ползунного
механизма
Курсовая работа по теории механизмов и машин.
Выполнила: студентка группы КТ-31
Ринчинова С.В
Руководитель работы: доцент
Водопьянов А.Ф
Хабаровск 2015 г.
Введение
Теория механизмов есть наука, изучающая строение, кинематику и динамику механизмов в связи с их анализом и синтезом.
Проблемы теории механизмов могут быть разбиты на две группы. Первая группа
проблем посвящена исследованию структурных, кинематических и динамических свойств механизмов, т.е. анализу механизмов.
Вторая группа проблем посвящена проектированию механизмов с заданными структурными, кинематическими и динамическими свойствами для осуществления требуемых движений, т.е. синтезу механизмов.
Движение механизмов зависит от их строения и сил, на них действующих. поэтому удобно при избежании теории механизмов, проблемы анализа механизмов разбить на две части:
А) структурный и кинематический анализ;
Б) динамический анализ механизмов.
Структурный и динамический анализы механизмов имеют своей целью изучение теории строения механизмов, исследование движения тел, их образующих, с геометрической точки зрения, независимо от сил, вызывающих движение этих тел.
Динамический анализ механизмов имеет собой целью изучение методов определения сил, действующих на тела, образующие механизм, во время движения этих тел, и изучение взаимосвязи между движениями этих тел, силами на них действующими, и массами, которыми обладают эти тела.
Проблемы синтеза механизмов удобно излагать по видам механизмов поэтому задачей синтеза является проектирование механизма предварительно выбранной структуры по заданным кинематическим и динамическим условиям.
Курсовой проект, включает в себя исследование кривошипно-ползунного механизма.
Исследование кривошипно- ползунного механизма составляет наибольший по объёму раздел курсового проекта по теории механизмов и машин и включает четыре этапа:
- Структурный анализ
- Кинематический анализ
- Анализ динамики установившегося движения
- Кинестатический расчет .
Кинестатический расчет невозможно сделать точно без учета динамических явлений в машине, а динамику движения невозможно без предварительного исследования кинематики. Следовательно, необходимо решать задачи структуры, кинематики, динамики движения и кинетостатики.
1.Исследование механизма
Задачи:
- Структурный анализ.
- Кинематический анализ.
- Анализ динамики установившегося движения.
- Кинетостатический анализ.
Таблица 1
Параметры механизма
|
тип данных |
обозначение |
значение |
|
Радиус кривошипа |
r(OA), м |
0,35 |
|
Длина шатуна |
(AB), м |
1,2 |
|
Дезоксиал |
(OK), м |
0 |
|
Центр масс шатуна |
d(AS) |
0,45 |
|
Угол наклона блока цилиндров |
, град |
60 |
|
Масса шатуна |
m2 , кг |
1,5 |
|
Масса поршня |
, кг |
1,1 |
|
Начальный момент инерции |
, кг м2 |
0,005 |
|
Момент инерции шатуна |
, кг м2 |
0,009 |
|
Показатель политропы: |
||
|
-при сжатии |
n1 |
0,15 |
|
-при расширении |
n2 |
0,7 |
|
Направление вращения коленвала |
По часовой стрелке |
|
|
Угловая скорость |
Wcp, рад/с |
200 |
|
Коэффициент неравномерности движения |
, % |
0,006 |
1.1. Структурный анализ
Условную схему механизма можно представить в следующем виде:
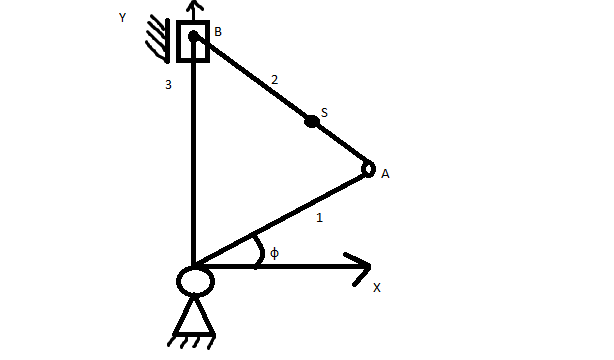

Рис.1
Задачи:
- Составление таблицы звеньев и кинетических пар.
- Определение степени подвижности.
- Определение класса механизма.
Допущения:
1. Звенья считаем абсолютно жесткими.
2. Трением в кинематических парах пренебрегаем.
3. Зазоры в кинематических парах отсутствуют.
Составление таблицы звеньев и кинематических пар.
По рис.1 O – стойка, 1 – кривошип, 2– шатун, 3 – ползун.
1.1.1 Определение степени подвижности механизма.
Так как данный механизм является плоским рычажным, его степень подвижности W можно определить по формуле П.Л. Чебышева.
W=3n-2p5
n – число подвижных звеньев
p5 – число вращательных и поступательных пар (пятого класса)
В таблице 2 показаны все кинематические пары.
Таблица 2
Кинематические пары
|
№ кинематической пары |
Обозначение пары |
Название пары |
Класс пары |
Звенья, входящие в пару |
|
1 |
О |
вращательная |
5 |
0,1 |
|
2 |
А |
вращательная |
5 |
1,2 |
|
3 |
В |
поступательная |
5 |
2,3 |
|
4 |
В’ |
вращательная |
5 |
3,0 |
W=3·3-2·4=1
Вывод: мы имеем простой рычажный механизм со степенью подвижности равной единице (W=1) и входным звеном назначаем звено 1.