Разработка вычислителя угловых положений электропривода на микроконтроллере AVR
СОДЕРЖАНИЕ
1 Введение………………………………………………………………..2
2 Анализ технического задания………………………………………..3
3 Разработка схемы электрической принципиальной..………………5
4 Описание элементной базы………………………………………….8
5 Разработка схемы электрической принципиальной…………….…12
6 Описание алгоритма программы..………………………….……….15
7 Моделирование…………………....………………………….……….18
8 Заключение……..…………………………..………………………….27
Список используемых источников……..………………………………28
Введение
Темой курсового проекта является разработка вычислителя угловых положений электропривода на микроконтроллере AVR.
Пояснительная записка к курсовому проекту будет содержать разделы, характеризующие объем и качество произведенных работ. Будут рассмотрены архитектурные особенности управляющего микроконтроллера, разработаны структурная и электрическая принципиальная схемы, произведен выбор элементной базы и выполнено моделирование работы устройства. Графическая часть будет содержать чертежи и плакаты, иллюстрирующие изложенный материал.
1 Анализ технического задания
1.Темой на дипломное проектирование является разработка вычислителя угловых положений электропривода на микроконтроллере AVR.
Определим основные характеристики разрабатываемого устройства.
1.1 Наименование изделия: вычислитель угловых положений электропривода на микроконтроллере AVR.
1.2 Устройство предназначено для проверки угловых инктрементных энкодеров.
1.3 Комплектность изделия: один блок.
1.4 Технические параметры, характеризующие основные свойства изделия:
Электрические характеристики разрабатываемой конструкции представлены в таблице 1.1.
Требования к габаритным показателям разрабатываемого изделия приведены в таблице 1.2.
Таблица 1.1 – Электрические характеристики
|
Характеристика
|
Величина
|
Единица измерения
|
|
Потребляемая мощность
|
не более 0,5
|
Вт
|
|
Напряжение питания
|
12
|
В
|
|
Частота питающего напряжения
|
0
|
Гц
|
Таблица 1.2 – Габаритные показатели
|
Характеристика
|
Величина
|
Единица измерения
|
|
Длина, не более
|
250
|
мм
|
|
Ширина, не более
|
250
|
мм
|
|
Толщина, не более
|
50
|
мм
|
1.5 Хранение и перевозка.
Изделие транспортируется в упаковке автомобильным, железнодорожным, водным и воздушным видом транспорта. Условия транспортирования средние (СТ).
1.6 Характеристики внешних воздействий:
- температура окружающей среды, °С от минус 10 до 50
- относительная влажность воздуха, % до 100
- вибрация в диапазоне частот 10-300 Гц с ускорением до 2,5g
3 разработка СХЕМЫ ЭЛЕКТРИЧЕСКОЙ СТРУКТУРНОЙ
На основе задания на курсовое проектирование и требований, приведенных в разделе 2 «Анализ технического задания» рассмотрим возможную структуру вычислителя угловых положений электропривода на микроконтроллере AVR и выработаем структурную схему разрабатываемой конструкции.
Рассмотрим описание типовой структурной схемы проектируемой микропроцессорной системы.
Микропроцессорная система (МПС) - система обработки данных, контроля и управления, построенная на базе одного или нескольких микропроцессоров (МП). МПС построены по программно-аппаратному принципу и представляют собой аппаратно-программный комплекс.
Любая микропроцессорная система содержит три основных части: МП, память для хранения данных и программ и устройства ввода-вывода (УВВ) со средствами обмена информацией с памятью и МП. Типовая структура микропроцессорной системы представлена на рисунке 1.
Микро ЭВМ или персональный компьютер представляют собой МПС общего применения.
Микропроцессор - программно-управляемое цифровое устройство для обработки цифровой информации и управления процессом обработки. Понятие «обработка данных» включает в себя выполнение простых арифметических и логических операций над данными: сложения, вычитания, дизъюнкцию, конъюнкцию, инверсию, сумму по модулю два, возможно умножение и деление. Большую группу операций составляют операции пересылок. Каждой операции соответствует команда в виде двоичного (машинного) кода, размещаемая в памяти. Совокупность команд, объединенных некоторой связью, представляет собой программу. Упрощенное функционирование микро-ЭВМ состоит в последовательном считывании команд из памяти в МП и их исполнении.
Рисунок 1 – Структурная схема микропроцессорной системы
Данные могут размещаться в регистрах МП, памяти или в УВВ. Результаты операций размещаются в МП, памяти или передаются в УВВ.
К УВВ относятся: клавиатура, дисплей, принтер, внешняя (дисковая) память, датчики и исполнительные устройства (реле, двигатели и др.).
Микроконтроллером выполняются три основные функции:
- измерение значений параметров сигналов, поступающих от датчиков;
- обработка данных;
- формирование сигналов управления для работы исполнительных устройств.
Простейшая обработка данных заключается в сравнении значений сигналов, поступающих от датчиков, с заданными значениями.
В качестве исполнительных устройств используются электродвигатели, электромагниты, механизмы электродинамического типа и др. Сигналы управления, формируемые микроконтроллером, могут быть аналоговыми и импульсными с соответствующими значениями временных и энергетических (напряжение, ток, мощность) параметров. Нагрузочная способность выводов микроконтроллера незначительна, поэтому между ним и исполнительными устройствами включают согласующие устройства выхода (усилители, ключевые устройства и др.). Кроме того, между микроконтроллером и исполнительными устройствами часто требуется гальваническая развязка. В качестве развязывающих устройств могут использоваться трансформаторы, оптоэлектронные приборы, усилители и другие.
В соответствии с выполняемыми функциями, микроконтроллер как минимум, имеет в своем составе обработчик данных по заданной программе и устройства для измерения параметров сигналов и формирования управляющих сигналов. Микроконтроллер представляет собой однокристальную микро-ЭВМ со всеми основными ее атрибутами: процессор, память, порты ввода-вывода, система прерываний и с интегрированными периферийными средствами поддержки реального времени и реализации функций измерения и формирования сигналов (таймеры, генераторы сигналов, АЦП, ЦАП, компараторы и др.).
4 Описание элементной базы
Перед тем, как на основе полученной структурной схемы составить электрическую принципиальную схему вычислителя угловых положений электропривода на микроконтроллере AVR, рассмотрим основные характеристики элементной базы, подходящей для реализации электрической принципиальной схемы.
В основе блока микропроцессорного управления будет использован микроконтроллер семейства AVR ATmega8. Данный микроконтроллер выполнен на основе современной гарвардской RISC архитектуры, обладает достаточно высоким быстродействием. Не менее важным является наличие большого количества документации и примеров его применения в различных сферах. Для разработки встраиваемых приложений на его основе предоставляются мощные, профессиональные и свободно распространяемые средства разработки и программирования. В дополнении к перечисленным преимуществам нужно добавить и низкую стоимость данного микроконтроллера.
ATmega8A-AU фирмы Atmel обладает следующими характеристиками:
8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением;
Прогрессивная RISC архитектура:
- 130 высокопроизводительных команд, большинство команд выполняется за один тактовый цикл;
- 32 8-разрядных рабочих регистра общего назначения Полностью статическая работа;
- Приближающаяся к 16 MIPS (при тактовой частоте 16 МГц) производительность;
- Встроенный 2-цикловый перемножитель.
Энергонезависимая память программ и данных:
8 Кбайт внутрисистемно программируемой Flash памяти (In-System Self-Programmable Flash):
- Обеспечивает 1000 циклов стирания/записи;
- Дополнительный сектор загрузочных кодов с независимыми битами блокировки;
- Обеспечен режим одновременного чтения/записи (Read-While-Write).
512 байт EEPROM:
- Обеспечивает 100000 циклов стирания/записи;
- 1 Кбайт встроенной SRAM;
- Программируемая блокировка, обеспечивающая защиту программных средств пользователя.
Встроенная периферия:
- Два 8-разрядных таймера/счетчика с отдельным предварительным делителем, один с режимом сравнения;
- Один 16-разрядный таймер/счетчик с отдельным предварительным делителем и режимами захвата и сравнения;
- Счетчик реального времени с отдельным генератором;
- Три канала PWM;
- 8-канальный аналого-цифровой преобразователь (в корпусах TQFP и MLF);
- 6 каналов с 10-разрядной точностью;
- 2 канала с 8-разрядной точностью;
- 6-канальный аналого-цифровой преобразователь (в корпусе PDIP);
- 4 канала с 10-разрядной точностью;
- 2 канала с 8-разрядной точностью;
- Байт-ориентированный 2-проводный последовательный интерфейс;
- Программируемый последовательный USART;
- Последовательный интерфейс SPI (ведущий/ведомый);
- Программируемый сторожевой таймер с отдельным встроенным генератором;
- Встроенный аналоговый компаратор.
Специальные микроконтроллерные функции:
- Сброс по подаче питания и программируемый детектор кратковременного снижения напряжения питания;
- Встроенный калиброванный RC-генератор;
- Внутренние и внешние источники прерываний;
- Пять режимов пониженного потребления: Idle, Power-save, Power-down, Standby и снижения шумов ADC.
Выводы I/O и корпуса:
- 23 программируемые линии ввода/вывода;
- 32-выводной корпус TQFP;
Рабочие напряжения:
- 2,7 - 5,5 В.
Рабочая частота:
- 0 - 16 МГц.
На рисунке 2 представлено расположение выводов микроконтроллера. На рисунке 3 приведена организация памяти микроконтроллера.
Память данных микроконтроллера разделена на три части: оперативная память ОЗУ(RAM), регистровая память (регистры общего назначения – РОН и регистры ввода-вывода) и энергонезависимая память (EEPROM). Емкость оперативной памяти данных (ОЗУ) составляет 1Кбайт. Запись и считывание содержимого ячеек ОЗУ производится по 8-разрядной шине данных микроконтроллера. Адрес ячейки ОЗУ подается либо из регистра команд, либо одного из регистров X,Z,Y (см. ниже).
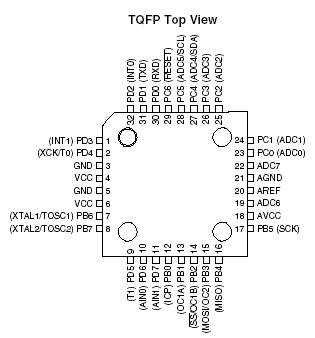
Рисунок 2 – Расположение выводов микроконтроллера ATmega8
Рисунок 3 – Организация памяти микроконтроллера ATmega8
5 Разработка схемы электрической принципиальной
На основе структурной схемы, а также применив подобранную элементную базу, произведем разработку схемы электрической принципиальной проектируемого устройства.
Схема электрическая принципиальная вычислителя угловых положений электропривода на микроконтроллере AVR приведена на рисунке 4.
В состав устройства входят: стабилизатор напряжения; устройство управления; блок питания; блок клавиатуры; блок исполнительных устройств; блок индикации; сенсоры.
В основе блока микропроцессорного управления использован микроконтроллер ATmega8A. Данный микроконтроллер содержит в своем составе встроенную периферию, удовлетворяющую основной структуре рассматриваемого блока, обладает достаточно высоким быстродействием. Не менее важным является наличие большого количества документации и примеров его применения в различных сферах. Для разработки встраиваемых приложений на его основе предоставляются мощные, профессиональные и свободно распространяемые средства разработки и программирования. В дополнении к перечисленным преимуществам нужно добавить и низкую стоимость данного микроконтроллера.
Для формирования и передачи последовательного кода шифрованной команды оказалось удобным использовать модуль USART, входящий в состав периферии микросхемы DD1.
Рисунок 4 – Схема электрическая принципиальная
Микроконтроллер DD1 включен по типовой схеме. Шесть выводов порта D использованы для подключения командной клавиатуры. Клавиатура опрашивается методом сканирования. Код команды обрабатывается устройством управления DD1, которое по определенному алгоритму формирует управляющие и информационные сигналы и передает их через последовательный интерфейс, подключенный к двум младшим разрядам порта D (выводы 14, 15 микросхемы DD1).
К семи старшим разрядам порта С (выводы 13-19 микросхемы DD1) микроконтроллера подключен жидкокристаллический дисплей DD3, отображающий графическую информацию, формируемую DD1 в зависимости от полученного кода команды.
Выводы порта B микроконтроллера сконфигурированы как выходы интерфейса SPI.
В соответствии с алгоритмом встроенного программного обеспечения микроконтроллером DD1 ATmega8A-AU происходит формирование сигналов управления элементами ввода и вывода данных. Кварцевый резонатор ZQ1 частотой 16МГц представляет собой опорный контур тактового генератора. Резистор R3 удерживает сигнал внешнего сброса МК в активном состоянии для обеспечения рабочего режима и предотвращения случайных сбросов по причине кратковременных импульсных помех. Разъем XS1 предназначен для подключения внутрисистемного устройства программирования памяти микроконтроллера и соответствует рекомендуемой спецификации AVRisp, предложенной компанией – производителем данного микроконтроллера Atmel.
Через разъемное соединение XS2 осуществляется подача питания от первичного источника. Питание устройства осуществляется напряжением +12В.
6 Описание алгоритма программы
Разработка встраиваемого программного обеспечения будет производиться на высокоуровневом языке программирования при помощи специализированного Си компилятора Code Vision AVR с использованием ассемблерных вставок.
Для микроконтроллеров AVR существуют различные языки программирования, но, пожалуй, наиболее подходящими являются ассемблер и Си, поскольку в этих языках в наилучшей степени реализованы все необходимые возможности по управлению аппаратными средствами микроконтроллеров.
Ассемблер - это низкоуровневый язык программирования, использующий непосредственный набор инструкций микроконтроллера. Создание программы на этом языке требует хорошего знания системы команд программируемого чипа и достаточного времени на разработку программы. Ассемблер проигрывает Си в скорости и удобстве разработки программ, но имеет заметные преимущества в размере конечного исполняемого кода, а соответственно, и скорости его выполнения.
Си — стандартизированный процедурный язык программирования, разработанный в начале 1970-х годов сотрудниками Bell Labs Кеном Томпсоном и Денисом Ритчи как развитие языка Би. Си был создан для использования в операционной системе UNIX. С тех пор он был портирован на многие другие операционные системы и стал одним из самых используемых языков программирования. Си ценят за его эффективность. Он является самым популярным языком для создания системного программного обеспечения. Его также часто используют для создания прикладных программ.
Си позволяет создавать программы с гораздо большим комфортом, предоставляя разработчику все преимущества языка высокого уровня.
Следует отметить, что архитектура и система команд AVR создавалась при непосредственном участии разработчиков компилятора языка Си и в ней учтены особенности этого языка. Компиляция исходных текстов, написанных на Си, осуществляется быстро и дает компактный, эффективный код.
Основные преимущества Си перед ассемблером: высокая скорость разработки программ; универсальность, не требующая досконального изучения архитектуры микроконтроллера; лучшая документируемость и читаемость алгоритма; наличие библиотек функций; поддержка вычислений с плавающей точкой.
В языке Си гармонично сочетаются возможности программирования низкого уровня со свойствами языка высокого уровня. Возможность низкоуровневого программирования позволяет легко оперировать непосредственно аппаратными средствами, а свойства языка высокого уровня позволяют создавать легко читаемый и модифицируемый программный код. Кроме того, практически все компиляторы Си имеют возможность использовать ассемблерные вставки для написания критичных по времени выполнения и занимаемым ресурсам участков программы.
Написание программы произведено при помощи компилятора языка Си для микроконтроллеров AVR Code Vision AVR C Compiler.
CodeVisionAVR — интегрированная среда разработки программного обеспечения для микроконтроллеров семейства Atmel AVR.
Цена полной версии этого компилятора невысока и составляет 150 EUR. Компилятор поставляется вместе с интегрированной средой разработки, в которую, помимо стандартных возможностей, включена достаточно интересная функция - CodeWizardAVR Automatic Program Generator. Наличие в среде разработки последовательного терминала позволяет производить отладку программ с использованием последовательного порта микроконтроллера.
CodeVisionAVR включает в себя следующие компоненты:
- компилятор Си-подобного языка для AVR;
- компилятор языка ассемблер для AVR;
- генератор начального кода программы, позволяющего произвести инициализацию периферийных устройств;
- модуль взаимодействия с отладочной платой STK-500;
- модуль взаимодействия с программатором;
- терминал.
Выходными файлами CodeVisionAVR являются:
- HEX, BIN или ROM-файл для загрузки в микроконтроллер посредством программатора;
- COFF — файл, содержащий информацию для отладчика;
- OBJ — файл.
Обработка сигналов времени производилась с помощью встроенного в микроконтроллер таймера/счетчика Т1.
Т1 – представляет собой 16-разрядный таймер-счетчик, предназначенный для точного задания временных интервалов, генерации прямоугольных импульсов и измерения временных характеристик импульсных сигналов.
Настройка тайера/счетчика Т1 производится следующей последовательностью команд:
TCCR1A=0x00;
TCCR1B=0x0C;//0x09
OCR1A=15;
TIMSK=0x10; //прерывание по совпадению Т1 в канале А
В результате чего таймер работает в режиме 4 СТС и формирует сигналы прерываний с периодичностью один раз в мили секунду.
7 Моделирование
Вычислительные способности современных вычислительных систем стали настолько велики, что позволяют выполнять довольно сложные алгоритмы обработки над большими объемами данных. А стоимость машинного времени этих систем настолько снизилась, что стало возможным повсеместное их внедрение. В связи с чем, наблюдается все большее количество программного обеспечения предназначенного для виртуального моделирования различных физических процессов. Исключением не стало и виртуальное моделирование радиоэлектронных схем и микропроцессорных архитектур.
Преимущества применения подобного специализированного прикладного программного обеспечения очевидно. Предоставляется возможность исключить промежуточное макетирование и использовать более доступные средства программирования микропроцессорных систем не применяя дорогостоящих внутрисистемных отладочных средств. Это снижает материальные затраты и время, которые необходимо затратить при проектировании радиоэлектронных систем на основе микропроцессоров и не только.
На сегодняшний день существует программное обеспечение, позволяющее производить процесс смешанного моделирования аналоговых устройств, цифровых логических схем и микропроцессоров одновременно. Наибольшую популярность среди подобных программ получила Proteus VSM.
Proteus Professional представляет собой систему схемотехнического моделирования, базирующуюся на основе моделей электронных компонентов принятых в PSpice. Отличительной чертой пакета Proteus Professional является возможность моделирования работы программируемых устройств: микроконтроллеров, микропроцессоров, DSP и прочее. Дополнительно в пакет Proteus Professional входит система проектирования печатных плат.
Proteus Professional может симулировать работу следующих микроконтроллеров: 8051, ARM7, AVR, Motorola, PIC, MSP430, Basic Stamp. Библиотека компонентов содержит справочные данные.
PROTEUS VSM предоставляет возможность очень достоверно моделировать и отлаживать достаточно сложные устройства в которых может содержаться несколько МК одновременно и даже разных семейств в одном устройстве.
Моделирование электронной схемы не совершенно точно повторяет работу реального устройства, но для отлаживания метода работы МК, предоставляемой функциональности более чем достаточно. PROTEUS содержит огромную библиотеку электронных компонентов. Отсутствующие модели можно сделать. Если компонент не программируемый, нужно на сайте производителя скачать его SPICE модель и добавить в подходящий корпус.
Proteus 7 состоит из двух основных модулей:
ISIS - графический редактор принципиальных схем служит для ввода разработанных проектов с дальнейшей имитацией и передачей для разработки печатных плат в ARES. К тому же после отладки устройства можно сразу развести печатную плату в ARES которая поддерживает авто размещение и трассировку по уже существующей схеме.
ARES - графический редактор печатных плат со встроенным менеджером библиотек и автотрассировщиком ELECTRA, автоматической расстановкой компонентов на печатной плате.
PROTEUS имеет уникальные возможности:
USBCONN - этот инструмент предоставляет возможность подключиться к реальному USB порту компьютера.
COMPIM - этот компонент предоставляет возможность вашему виртуальному устройству подключится к РЕАЛЬНОМУ COM-порту вашего ПК.
PROTEUS VSM - великолепно работает с популярными компиляторами Си для МК:
- CodeVisionAVR(для МК AVR)
- IAR(для любых МК)
- ICC(для МК AVR, msp430, ARM7, Motorola)
- WinAVR(для МК AVR)
- Keil(для МК архитектуры 8051 и ARM)
- HiTECH(для МК архитектуры 8051 и PIC от Microchip)
Программа PROTEUS VSM идеально подходит для новичков, решивших начать изучение микроконтроллеров.
Рассмотрим процесс моделирования электрической принципиальной схемы разработанного устройства. Моделирование устройства выполнено в рассмотренном выше программном пакете Proteus VSM.
В связи с тем, что работоспособность выбранных в процессе разработки устройства схемотехнических решений не вызывают сомнения, и моделирование схемы производится для упрощения процесса разработки и отладки встраиваемого в целевой микроконтроллер программного обеспечения, построение модели выполним по упрощенной эквивалентной логической схеме. При моделировании процесс прохождения по цепям устройства электрических сигналов будет рассмотрен только с точки зрения эквивалентных логических уровней, поэтому некоторые узлы заменены на логические элементы, а некоторые (например предназначенные для согласования электрических уровней) – исключены.
На рисунке 5 приведено рабочее окно программы Proteus VSM, которое содержит типичные для Windows – приложений элементы управления.
Рисунок 5 – Рабочее окно Proteus VSM
Моделирование электрической схемы начнем с выбора подходящих элементов во встроенных библиотеках программы. Выполнив команду меню Library/Pick Devices… from the Libraries, появится диалог Pick Devices, предоставляющий возможность поиска библиотечных элементов по категориям. Диалог Pick Devices представлен на рисунке 6.
Для поиска требуемого элемента в библиотеке необходимо ввести ключевое слово для поиска в поле для ввода Keywords. После чего в поле Category появятся категории библиотек, в которых были найдены совпадения с ключевой фразой. Результаты поиска будут отображены в поле Results. Выбранные элементы будут отображены в области рабочего окна программы Devices Selector. Список используемых при виртуальном моделировании компонентов представлен на рисунке 7.
Рисунок 6 – Диалог Pick Devices
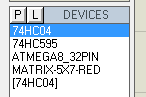
Рисунок 7 – Список компонентов
Для размещения выбранных компонентов в рабочей области программы необходимо переключиться в режим ввода компонентов Component Mode. В режиме Buses Mode осуществляется ввод электрических шин. В режиме Wire Label Mode устанавливаются специальные имена электрических связей. Редактирование разрабатываемой модели производится в режиме Selection Mode. На панели инструментов с правой стороны окна также доступны специальные режимы позволяющие использовать виртуальные измерительные приборы, различные генераторы и многое другое.
На рисунке 8 представлена модель разработанного в рамках дипломного проектирования информационного табло “бегущая строка”, выполненная на основе упрощенной логической схеме эквивалентной электрической принципиальной схеме.
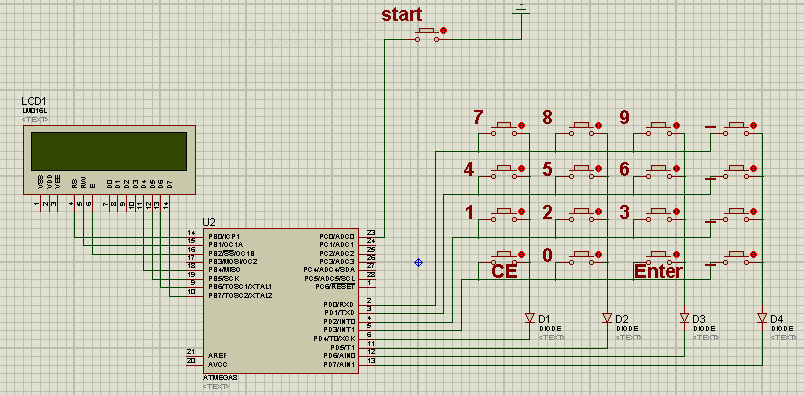
Рисунок 8 – Модель устройства управления спортивным табло
Для моделирования схем на основе микроконтроллеров необходимо указать фай л исполняемой программы. Для этого в свойствах модели выбранного микроконтроллера предусмотрен пункт Program Files. Свойства микроконтроллеров с архитектурой AVR представлены на рисунке 9 в диалоге Edit Component. Кроме указания пути к файлу прошивки возможно изменить фьюз – биты конфигурации микроконтроллера.
Рисунок 9 – Диалог Edit Component
Приступить к моделированию работы виртуальной схемы можно выполнив команду Run the Simulation. Приостановить процесс симуляции можно командой Pause the Simulation. Полная остановка симуляции производится по команде Stop the Simulation. По команде Advance the Simulation by one animation frame. Выполнение данных команд возможно нажатием экранных клавиш в левом нижнем углу рабочего окна программы.
Команды, реализующие возможности отладки построенной модели расположены в меню Debug, которое представлено на рисунке 10.
Предусмотрены такие возможности отладки, как: выполнение пошаговой отладки, анимация, установка точек останова, просмотр процесса выполнения исходного кода, просмотр состояния переменных и памяти моделируемого микропроцессора и прочее. На рисунке 11 приведен пример рабочего окна программы в процессе выполнения пошагового тестирования разработанного для целевого микроконтроллера программного обеспечения.
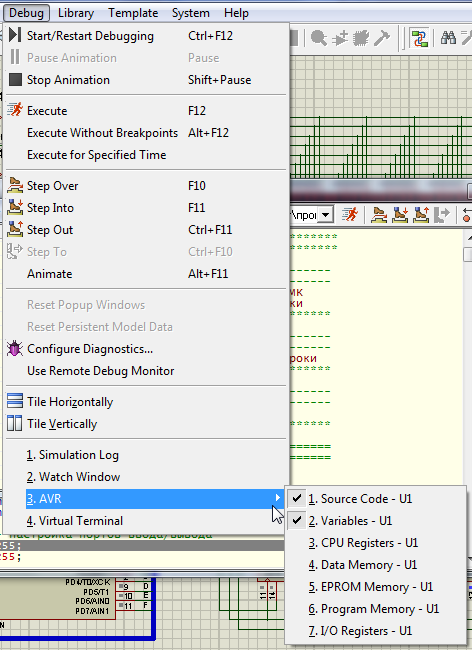
Рисунок 10 – Меню Debug
Оценка производительности микропроцессорной системы показала, что выбранный набор схемотехнических решений позволяет реализовать требуемую функциональность, а также предоставляет запас вычислительных ресурсов для дальнейших модификаций.
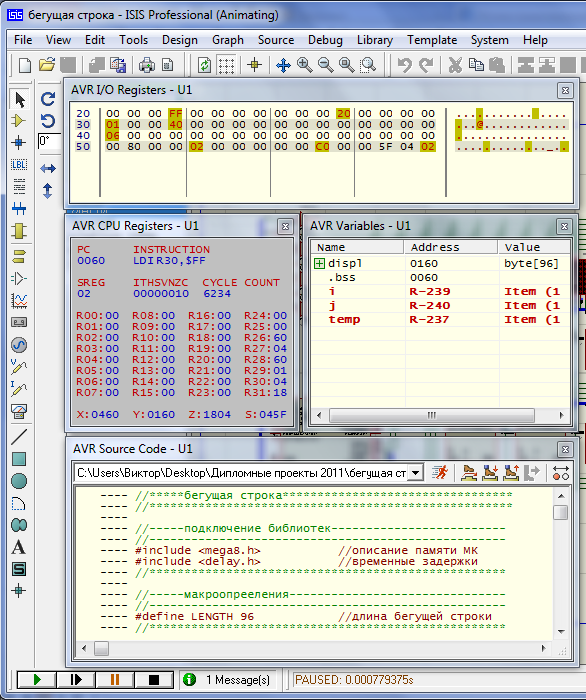
Рисунок 11 – Пошаговая отладка
8 Заключение
В результате работы над курсовым проектом разработана структурная, электрическая принципиальная схемы, а также блок-схема алгоритма программного обеспечения вычислителя угловых положений электропривода на микроконтроллере AVR.
Устройство управления построено на микроконтроллере ATmega8 фирмы Atmel, который включает в себя все необходимые интерфейсы, оснащен достаточным объемом памяти данных и набором периферии, необходимой для реализации электрической схемы проектируемого изделия.
Устройство, разработанное в ходе курсового проектирования, не содержит дорогих и дефицитных комплектующих, что является экономически выгодным в условиях современных рыночных отношений.
Данные, полученные при курсовом проектировании, полностью соответствуют техническому заданию.
Список используемых источников
1. Авдеев В.А., Гузик В.Ф. Компьютеры: шины, контроллеры, периферийные устройства. Учебное пособие. М.: Радио и связь, 2011. 480 с.
2. Иванов Е.Л. и др. Периферийные устройства ЭВМ и систем; Учебное пособие для втузов по спец. "ЭВМ". М.: Высшая школа., 2013. – 319 с.
3. Хоровиц П., Хилл У. Искусство схемотехники: в 3-х томах: Т.2./ Пер. с англ. – 4-е изд., перераб. и доп.- М.: Мир, 1993. –371 с.
4 .Рафикузаман М. Микропроцессоры и машинное проектирование микропроцессорных систем: в 2-х кн./ Пер. с англ. – М.: Мир, 2008. – 288с.:ил.
5 .Дж.Фрир Построение вычислительных систем на базе перспективных микропроцессоров. Пер. с англ. – М.:Мир, 1990. – 413с.:ил.
6. Каган Б.М. Электронные вычислительные машины и системы. М.: Энергоатомиздат, 2014. 552 с. : ил.
7. Григорьев В.Л. Программирование однокристальных микропроцессоров. М.:Энергоатомиздат, 2007. 288 с.
8. Проектирование микропроцессорной электронно-вычислительной аппаратуры: Справочник / В.Г.Артюхов и др. Киев: Техника, 2008. 263 с.
9. Вирт Н. Алгоритмы + Структуры данных = Программы. – М.: Мир, 2005.
10. Зиглер К. Методы проектирования программных систем. – М.: Мир, 2005.
11. Астафьев В.Е. и др. Экономика электротехнического производства. М: "Высшая школа, 2009.
12. Ипатов М.И., Туровец О.Г. Экономика, организация и планирование технической подготовки производства. М: 2007.
13. Кнол А.И., Лапшин Г.М. Организация и планирование радиотехнического производства. Управление предприятием радиопромышленности. М: Высшая школа, 2007.
Разработка вычислителя угловых положений электропривода на микроконтроллере AVR