Двигун постійного струму паралельного збудження МП-22
Міністерство освіти та науки України
Відокремлений структурний підрозділ - Технічний коледж Національного
університету «Львівська Політехніка»
Відділення інформаційних технологій
та комп’ютерної техніки
Курсова робота
з дисципліни «Електричні машини та апарати»
на тему:
«Двигун постійного струму паралельного збудження МП-22»
Виконав студент Приймав викладач
Групи 31 – ЕМ Рябоконь Н.С.
Данчишин Олексій Богданович
Львів 2015
Затверджую
Завідувач відділення
Василиця Я.Д.___________
“____”____________20___p.
Завдання
на курсову роботу
Відділення___________________________________________________________
Спеціальність_________________________________________________________ Прізвище, ім`я, по батькові _____________________________________________ Теми________________________________________________________________ Керівник_____________________________________________________________
Зміст завдання
Графічна частина ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Зміст роботи ______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Рекомендована література __________________________________________________________________________________________________________________________________________
Дата видачі____________________________
Термін захисту_________________________
Керівник______________
Зміст
Вступ………………………………………………………………………………………………………………….
Розділ 1. Описова частина
1.1 Основні відомості про двигуни постійного струму, їх класифікація ………………..
1.2 Принцип дії двигуна постійного струму паралельного збудження ……………….
1.3 Будова двигуна постійного струму паралельного збудження.……………………….
1.4 Регулювання частоти двигуна постійного струму паралельного збудження…
1.5 Характеристика двигуна постійного струму паралельного збудження………….
1.5.1 Робочі характеристики ………………………………………………………………………………….
1.5.2 Механічні характеристики……………………………………………………………………………..
Розділ 2. Розрахункова частина
2.1 Паспортні дані двигуна постійного струму паралельного збудження МП-22…………………………………………………………………………………………………………………………….
2.2 Розрахунок габаритних розмірів двигуна постійного струму МП-22…………….
2.3 Розрахунок пускових опорів двигуна постійного струму МП-22………………….
2.4 Розрахунок робочих та механічних характеристик двигуна постійного струму МП-22…………………………………………………………………………………………………………………....
Розділ 3. Додаток
3.1 Графічна частина………………………………………………………………………………………………
3.2 Література ………………………………………………………………………………………………………..
1
Вступ
Прогрес сучасної науки і техніки нерозривно пов'язаний із застосуванням електричної енергії в різних виробничих проце сах і пристроях.
Електричні машини широко застосовують на електричних станціях, у промисловості, на транспорті, в авіації, у системах автоматичного регулювання і управління, у побуті. Вони пере творюють механічну енергію в електричну і, навпаки, електрич ну енергію в механічну. Машина, що перетворює механічну енер гію в електричну, називається генератором. Перетворення електричної енергії в механічну здійснюється двигуном. Будь-яка електрична машина може бути використана як генератором, так і двигуном. Ця властивість змінювати напрямок енергії, що пе ретворюється нею, називається оборотністю машини. Електрич на машина може бути також використана для перетворення елек тричної енергії одного роду струму (частоти, числа фаз змінного струму, напруги постійного струму) в енергію іншого роду стру му. Такі електричні машини називаються перетворювачами.
Електричні машини застосовують у всіх галузях промисло вості. Внаслідок цього існує велика їх різноманітність. Вони розрізняються за принципом дії, потужністю, частотою обертан ня й іншими ознаками. Широкому поширенню електричних машин сприяють їх високий ККД, зручність обслуговування і простота управління.
Електричні машини діляться на машини постійного струму і машини змінного струму. Машини змінного струму можуть бути синхронними і асинхронними, однофазними і багатофаз ними. Найбільш широке застосування знайшли трифазні син хронні й асинхронні машини, а також колекторні машини змінного струму, що дозволяють здійснювати економічне регу лювання частоти обертання в широких межах.
Принцип дії електричної машин заснований на використанні законів електромагнітної індукції й електромагнітних сил. У ре зультаті взаємодії струму в провіднику з магнітним полем полюсів магнітів створюється електромагнітна сила, ця сила буде спрямо вана назустріч силі, що переміщає провідник у магнітному полі.
Значне поширення машин постійного струму пояснюється їх цінними якостями: високими пусковим, гальмівних та перевантажувальним моментами, порівняно високим швидкодією, що важливо при реверсуванні і гальмуванні, можливістю широкого і плавного регулювання частоти обертання.
В курсовій роботі розглядається двигун постійного струму типу МП-22 паралельного збудження у якого якірна обмотка і обмотка збудження підключені до мережі паралельно. Такий двигун не сильно реагує на зміну навантаження, а з тим відповідно має жорстку характеристику. Деякі двигуни з паралельним збудженням мають невелику, на декілька витків, обмотку послідовного збудження, яка підключена зустрічно із паралельною обмоткою, і призначена для зменшення реакції якоря.
Розділ 1. Описова частина.
1.1 Основні відомості про двигуни постійного струму, їх класифікація .
Двигуни постійного струму широко застосовуються в промислових, транспортних, кранових та інших установках, де необхідне регулювання частоти обертання в широкому діапазоні. Одна і та ж електрична машина може працювати як в режимі генератора, так і в режимі двигуна. Ця властивість електричних машин має назву зворотність.
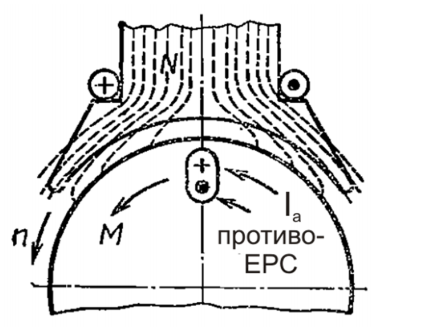
Мал.1
Припустимо, що до двигуна підведена напруга Uмережі = const. При заданій на (мал. 1) полярності полюсів та напрямку струму Іа в якорі (обмотка якоря показана тільки одним проводом) на валу двигуна створюється обертовий електромагнітний момент М, направлений проти напрямку обертання годинникової стрілки.
Під дією цього моменту ротор двигуна обертається у напрямку моменту з постійною частотою n. Застосовуючи правило правої руки, визначаємо, що в провідниках обмотки якоря наводиться ЕРС еа, яка направлена зустрічно відносно струму якоря, і тому її називають противо-ЕРС якоря і розглядають як електромагнітну протидію двигуна відносно напруги мережі Uмережі.
В основу створення нового покоління машин серії 4П покладені наступні принципи диференціації двигунів постійного струму:
- по регулювальних властивостях: двигуни з нормальним регулюванням
- до 1:5 і двигуни з широким регулюванням
- до 1:1000; - по типу конструкції: закриті, захищені; - за умовами експлуатації: нормальні, з тяжкими умовами експлуатації.
Двигуни потужністю до 10 кВт з нормальними регулювальними властивостями становлять майже 2/3 загальної потреби галузей народного господарства в машинах постійного струму. З метою значного зниження (в 2 - 3 рази) трудомісткості виготовлення таких двигунів у новій серії реалізована ідея уніфікації конструкції машин постійного струму з асинхронними двигунами.
За способом живлення обмотки збудження розрізняють наступні типи двигунів постійного струму:
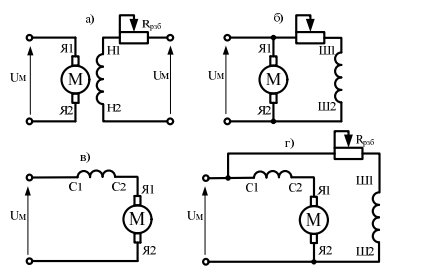
Мал.2
– з незалежним збудженням - обмотка збудження ДПС отримує живлення від стороннього джерела постійного струму; (мал. 2, а)
– з паралельним збудженням - обмотка збудження ДПС (шунтова обмотка) та обмотка якоря підключені паралельно мережі живлення; (мал. 2, б)
– з послідовним збудженням - обмотка збудження ДПС підключена послідовно з обмоткою якоря і мережею живлення; (мал. 2, в)
– зі змішаним збудженням - використовуються дві обмотки збудження: одна підключається паралельно джерела живлення (шунтова обмотка), друга послідовно з обмоткою якоря. (мал. 2, г)
[Л.1: Кацман М.М.]
1.2 Принцип дії двигуна постійного струму паралельного збудження.
Принцип дії електричних двигунів постійного струму базується на взаємодії провідників обмотки якоря, по яких протікає струм, з магнітним полем полюсів машини, в якому знаходяться провідники.
Основне поле Ф у двигуні, як і в генераторі, створюється струмом обмотки збудження, а струм іа в провідниках обмотки якоря протікає під дією підведеної до неї постійної напруги. Сила, що діє на провідник, визначається законом Ампера.
Напрям цієї сили визначається правилом лівої руки. Обмотка якоря намотується таким чином, щоб одна сторона секції (витка) знаходилась під північним (N) полюсом, а друга – під південним (S). Тому, щоб якір обертався увесь час в одну і ту саму сторону, при переході провідника з-під північного полюса під південний напрям струму в ньому повинен змінюватися на протилежний. Напрям струму в провідниках обмотки якоря при переході їх через лінію геометричної нейтралі змінюється за допомогою колектора. Таким чином, колектор у двигуні перетворює постійний струм джерела живлення в змінний струм у секції (витку) обмотки якоря, тобто виконує функцію інвертора струму. Зміна напряму струму у витку за допомогою колектора показана на мал.3.
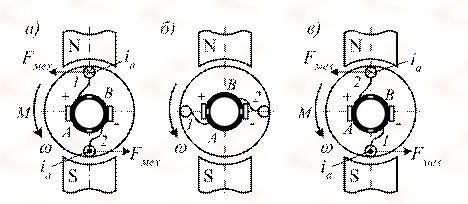
Мал.3
– Процес створення обертового моменту в двигуні постійного струму.
Виток 1-2 (мал.3, а) розміщений у магнітному полі полюсів. Кінці його припаяні до колекторних пластин А і В. Під дією прикладеної до щіток напруги у витку протікає струм іа. Визначивши за правилом лівої руки напрямок сил, що діють на провідники 1 і 2, бачимо, що виток буде обертатися проти руху годинникової стрілки. В позиції (мал.3, б )виток пройде геометричну нейтраль за рахунок сил інерції (якщо він один) або під дією інших витків, які в цей час не знаходитимуться на геометричній нейтралі (у реальній машині). В позиції (мал.3, в), коли сторона 1 витка перейшла в зону дії південного полюса, а сторона 2 – у зону дії північного, напрям струму у витку зміниться на протилежний, тому що під щіткою позитивної полярності виявилася пластина В, а під щіткою негативної полярності – пластина А. Отже, на виток діє момент такого ж напряму, як і в позиції (мал. 3, а) і він буде продовжувати обертатися в ту ж саму сторону.
При обертанні якоря в магнітному полі полюсів у провідниках його обмотки буде індукуватися ЕРС, напрямок якої визначається, як і в генераторі, за правилом правої руки, але він завжди протилежний напрямку струму в провідниках обмотки якоря (мал. 4). В зв’язку з тим, що струм в обмотці якоря створюється прикладеною напругою, ЕРС якоря спрямована назустріч цій напрузі живлення. Тому таку ЕРС називають проти ЕРС.
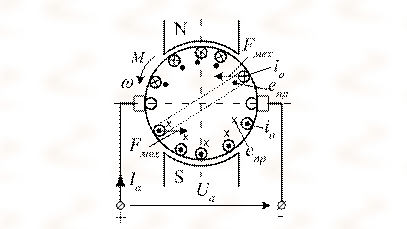
Мал.4
– До пояснення проти ЕРС.
Величини електромагнітного моменту двигуна і ЕРС, індукованої в обмотці якоря, визначаються за тими ж виразами, що і для генератора:
 (1,2)
(1,2)
Прикладена до обмотки якоря двигуна напруга врівноважується наведеною в ній проти ЕРС, а також спадом напруги в якірному колі:
 (3)
(3)
В номінальному режимі роботи двигуна велика частина напруги (близько 95%) врівноважується проти ЕРС, а на спад напруги приходиться близько 5%. В пусковому режимі при вмиканні двигуна в мережу в перший момент якір ще нерухомий (w = 0), тому E = cмwФ = 0 і вся прикладена напруга врівноважується тільки спадом напруги в якорі ІаRa. Внаслідок цього струм якоря при пуску буде перевищувати струм номінального режиму приблизно в 20 разів, що є недопустимим. Щоб обмежити пусковий струм, у колоякоря двигуна вводять пусковий реостат Rп, який повинен обмежувати струм приблизно до 1,5Іа.ном(Іа.ном – номінальний струм якоря). По мірі розгону двигуна реостат повинен виводитися і при роботі в номінальному режимі струм у якорі обмежується в основному наведеною в обмотці проти ЕРС:
 (4)
(4)
Для зміни напряму обертання двигуна необхідно змінити напрям обертового моменту, який він розвиває. Це можна зробити одним із двох способів:
1) зміною полярності напруги, підведеної до якоря двигуна, і, як наслідок, напряму струму якоря;
2) зміною напряму магнітного потоку головних полюсів, для чого змінюється напрям струму в обмотці збудження.
На практиці здебільшого використовується перший спосіб.
Розглянувши принципи дії генератора і двигуна, можна зробити висновок про те, що машини постійного струму оборотні. Це значить, що за певних умов генератори можуть працювати як двигуни і навпаки. Можливість двигунів працювати як генератори і, як наслідок, розвивати гальмівний момент, широко використовується на практиці.
[Л.1: Кацман М.М.]
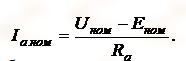
1.3 Будова двигуна постійного струму паралельного збудження.
Машини постійного струму складаються з трьох головних частин: статора, якоря та колектора.
1). Статор складається з обмотки головних та додаткових полюсів. Обмотка розташована на феромагнітному осерді. Струм, який проходить по обмотці, відповідно до закону повного струму, збуджує робочий магнітний потік машини, який наводить в якорі ЕРС. Обмотка збудження буває послідовною (серієсною С1, С2) та паралельною (шунтовою Ш1, Ш2).
Робочий магнітний потік машин постійного струму можна створити за допомогою застосування постійних магнітів.
Мал.5
2). Якір машин постійного струму складається з обмотки якоря та колектора. Обмоткою якоря називають ту частину машини постійного струму, в якій наводиться ЕРС. В обмотці якоря наводиться змінна синусоїдальна ЕРС. Обмотка якоря розташована на листовому феромагнітному осерді та складається з окремих секцій. Кінці секцій приєднують до колекторних пластин.
3). Колектор машини постійного струму призначений для перетворення змінної ЕРС якоря в постійний струм зовнішнього електричного кола для генератора та зворотного перетворення для двигунів. Колектор машин постійного струму – це механічний перетворювач форми струму. В режимі генератора – це механічний випрямляч. В режимі двигуна – це механічний інвертор. На колекторні пластини накладають графітові, або мідно графітові щітки. Щітки, разом з колектором, забезпечують електричний контакт рухомого якоря з нерухомою зовнішньою частиною електричної машини.
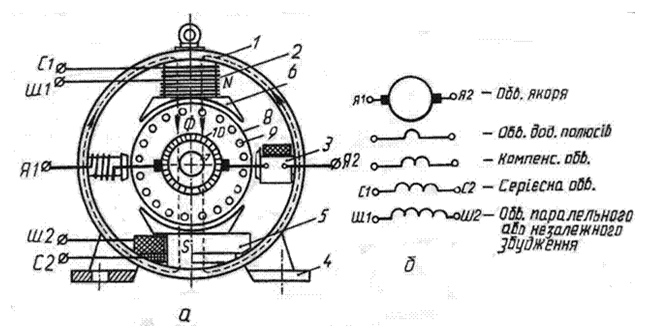
Таким чином, на зовнішніх виводах машини з’являється напруга, яка наводиться в якорі генератора. При підключенні до виводів якоря опору навантаження ЕРС створює струм, який проходить через якір генератора. В результаті відбувається взаємодія струму якоря з магнітним полем статора. Ця взаємодія створює електромагнітну силу Ампера. Величина сили взаємодії визначається законом Ампера:
(5)
Мал.6
Fем – електромагнітна сила Ампера, І – струм, який проходить по провіднику, l – активна довжина провідника, В – величина магнітної індукції, – кут між напрямком струму у провіднику та вектором магнітної індукції. Закон Ампера визначає умови створення електромагнітної сили. Напрямок дії сили Ампера визначається правилом лівої руки, або за правилом потрійного векторного добутку. Напрямок дії електромагнітної сили за правилом лівої руки визначається наступним чином: долоню лівої руки розташовують в магнітному полі з вектором індукції так, щоб магнітні силові лінії входили в долоню; чотири пальця направляємо вздовж напрямку струму у провіднику; тоді великий палець буде показувати напрямок електромагнітної сили .
Напрямок електромагнітної сили Ампера в генераторі направлений в протилежному напрямку до прикладеної зовнішньої механічної сили . Електромагнітна сила Ампера створює в генераторі гальмівний момент.
Механічна сила повинна бути більше протидіючої сили на величину додаткових механічних втрат F0:
Fмех = Fем +F0 , Fмех > Fем (6)
Прикладена зовнішня механічна потужність визначається за формулою: Nмех=Fм·v; протидіюча потужність: Рем = Fем· v, а протидіюча сила Ампера Fем=ІBl. Враховуючи ці формули, маємо:
Pем = IВlv = IE. (7)
Таким чином, прикладена зовнішня механічна потужність Nмех витрачається на обертання якоря генератора, в якому наведена ЕРС створила струм. Це означає перетворення в генераторі механічної енергії в електричну.
[Л.2: http://uk.wikipedia.org/wiki.
1.4 Регулювання частоти обертання двигунів постійного струму паралельного збудження.
Способи регулювання частоти обертання двигунів оцінюються наступними показниками: плавністю регулювання; діапазоном регулювання, обумовленим відношенням найбільшої частоти обертання до найменшої; економічністю регулювання, обумовленою вартістю регулюючої апаратури і втратами електроенергії в ній.
Регулювати частоту обертання двигуна паралельного збудження можна зміною опору в колі якоря, зміною основного магнітного потоку, зміною напруги в колі якоря.
Введення додаткового опору в коло якоря. Додатковий опір (реостат R ра ) включають в коло якоря аналогічно пусковому реостату. Однак на відміну від останнього, додатковий опір повинний бути розрахований на тривале протікання струму.
При включенні опору R ра в коло якоря вираз частоти приймає вигляд:
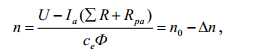 (8)
(8)
де  - частота обертання в режимі х.х.;
- частота обертання в режимі х.х.;
 - зміна частоти обертання, викликана спаданням напруги в колі якоря.
- зміна частоти обертання, викликана спаданням напруги в колі якоря.
Зі збільшенням R ра зростає n , що призводить до зменшення частоти обертання. Залежність  ілюструється також і механічними характеристиками двигуна паралельного збудження: з підвищенням R ра збільшується нахил механічних характеристик, а частота обертання при заданому навантаженні на валу
ілюструється також і механічними характеристиками двигуна паралельного збудження: з підвищенням R ра збільшується нахил механічних характеристик, а частота обертання при заданому навантаженні на валу  зменшується. Цей спосіб забезпечує плавне регулювання частоти обертання в широкому діапазоні (тільки убік зменшення частоти від номінальної), однак він не економічний через значні втрати електроенергії в регулювальному реостаті
зменшується. Цей спосіб забезпечує плавне регулювання частоти обертання в широкому діапазоні (тільки убік зменшення частоти від номінальної), однак він не економічний через значні втрати електроенергії в регулювальному реостаті  , які інтенсивно ростуть зі збільшенням потужності двигуна.
, які інтенсивно ростуть зі збільшенням потужності двигуна.
Зміна основного магнітного потоку. Цей спосіб регулювання у двигуні паралельного збудження реалізується за допомогою реостата Rрзб в колі обмотки збудження. Так, при зменшенні опору реостата зростає магнітний потік обмотки збудження, що супроводжується зниженням частоти обертання. При збільшенні Rрзб частота обертання зростає. Залежність частоти обертання від струму збудження виражається регулювальною характеристикою двигуна 
Вид регулювальних характеристик n f (Ф) залежить від значення навантажувального моменту M2 на валу двигуна: з ростом M2 максимальна частота обертання nmax зменшується
Мал.7
Недолік розглянутого способу регулювання частоти обертання полягає в тому, що при зміні магнітного потоку Ф змінюється кут нахилу механічної характеристики двигуна.
Розглянутий спосіб регулювання частоти обертання простий і економічний, тому що у двигунах паралельного збудження струм , а тому втрати в регулювальному реостаті
, а тому втрати в регулювальному реостаті  невеликі.
невеликі.
[Л.3: http://web.kpi.kharkov.ua.]
1.5 Характеристика двигуна постійного струму паралельного збудження.
1.5.1 Робочі характеристики.
Робочими називаються регулювальна, швидкісна, моментна і к.к.д. характеристики.
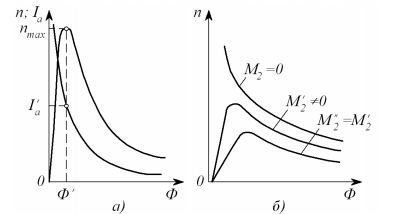
Регулювальна характеристика.
Регулювальна характеристика представляє залежність швидкості обертання П від струму Iв порушення у випадку, якщо струм Iа якоря і напруга U мережі залишаються незмінними, тобто n = f (Iв) при Ia = const та U = const.
До тих пір, поки сталь магнітопровода машини не насичена, потік Ф змінюється пропорційно току збудження Iв. У цьому випадку регулювальна характеристика є гіперболічної. У міру насичення при великих струмах Iв характеристика наближається до лінійної (рис. 2). При малих значеннях струму Iв швидкість обертання різко зростає. Тому при обриві ланцюга збудження двигуна (Iв = 0) з паралельним порушенням швидкість його обертання досягає неприпустимих меж, як кажуть: «Двигун йде в рознос». Виняток можуть становити мікродвигуни, які мають відносно великий момент М0 холостого ходу.
Мал.8- Регулювальна характеристика двигуна.
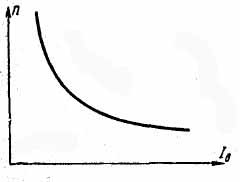
Швидкісні характеристики.
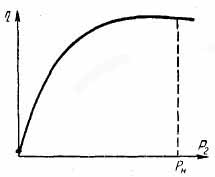
Швидкісні характеристики дають залежність швидкості обертання п від корисної потужності Р2 на валу двигуна в разі, якщо напруга U мережі і опір rв регулювального реостата ланцюга порушення залишаються незмінними, тобто n = f (P2), при U = const і rв = const .
Мал.9 - Швидкісні характеристики
Із зростанням струму якоря при збільшенні механічного навантаження двигуна паралельного збудження водночас збільшується падіння напруги в якорі і з'являється реакція якоря, яка зазвичай діє розмагнічувальним чином. Перша причина прагне зменшити швидкість обертання двигуна, друга - збільшити. Дія падіння напруги в якорі зазвичай надає більший вплив. Тому швидкісна характеристика двигуна паралельного збудження має злегка падаючий характер.
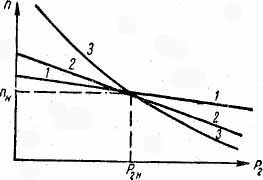
Моментні характеристики.
Моментні характеристики показують, як змінюється момент М при зміні корисної потужності Р2 на валу двигуна, якщо напруга U мережі і опір rв регулювального реостата в колі збудження залишаються незмінними, тобто М = f (P2), при U = const, rв = const.
Корисний момент на валу двигуна
 (9)
(9)
Якщо швидкість обертання двигуна паралельного збудження не змінювалася б з навантаженням, то залежність моменту Ммех від корисної потужності графічно представляла б пряму лінію, що проходить через початок координат. Насправді швидкість обертання зі збільшенням навантаження падає. Тому характеристика корисного моменту кілька загинається догори (крива 2, рис. 4). При цьому крива електромагнітного моменту М проходить вище кривої корисного моменту Ммех на постійну величину, рівну моменту холостого ходу М0 (крива 1).

Мал.10 - Моментні характеристики.
Характеристика зміни коефіцієнта корисної дії.
Крива залежності к. п. д. від навантаження має характерний для всіх двигунів вигляд (рис 5). Крива проходить через початок координат і швидко зростає при збільшенні корисної потужності до 1 / 4 номінальної. При потужності Р2, що дорівнює приблизно 2 / 3 номінальної, к. п. д. зазвичай досягає максимального значення. При збільшенні навантаження до номінальної к. п. д. залишається постійним або незначно падає.
Мал.11 - Зміна к. п. д. двигуна.
1.5.2 Механічна характеристика
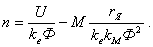
Найважливішою характеристикою двигуна є механічна n (M). Вона показує, як залежить частота обертання двигуна від розвиваючого моменту. Якщо до обмоток двигуна підведені номінальні напруги і відсутні додаткові резистори в його ланцюгах, то двигун має механічну характеристику, звану природною. На природній характеристиці знаходиться точка, відповідна номінальним даними двигуна (М н, Р я і т.д.). Якщо ж напруга на обмотці якоря менше номінального, або I в <I вн, то двигун буде мати різні штучні механічні характеристики. На цих характеристиках двигун працює при пуску, гальмуванні, реверсі і регулювання частоти обертання.
Перетворивши вираз щодо частоти обертання, отримаємо рівняння електромеханічної характеристики n (I я):
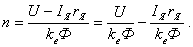 (10)
(10)
Після заміни в рівнянні струму I я згідно з формулою отримаємо рівняння механічної характеристики n (М):
 (11)
(11)
При Ф = соnst, електромеханічна n (I я) і механічна n (М) характеристики двигуна паралельного збудження представляють собою прямі лінії. Так як за рахунок реакції якоря магнітний потік трохи змінюється, то характеристики в дійсності дещо відрізняються від прямих.
При роботі вхолосту (М = 0) двигун має частоту обертання холостого ходу, яка визначається першим членом рівняння. Зі збільшенням навантаження n зменшується. Як випливає з рівняння це пояснюється наявністю опору якоря r я.
Оскільки r я не велика, частота обертання двигуна при збільшенні моменту змінюється мало, і двигун має жорстку природну механічну характеристику (рис.6, характеристика 1).
З рівняння випливає, що регулювати частоту обертання при заданій постійній навантаженні (М = const) можна трьома способами:
а) зміною опору кола якоря;
б) зміною магнітного потоку двигуна;
в) зміною напруги на затискачах якоря.
Мал.12 Механічні характеристики
Для регулювання частоти обертання першим способом в ланцюг якоря. повинно бути включено додатковий опір r д. Тоді опір в рівнянні необхідно замінити на r я + r д.
[Л.1: Кацман М.М.]
Розділ 2. Розрахункова частина.
2.1 Паспортні дані двигуна постійного струму паралельного збудження МП-22.
|
Тип |
РН, кВт |
n, об/хв |
ІН, А |
RЯ+RД.П, Ом |
RПАР, Ом |
Число активних провідників якоря N |
Число паралельних вентилів якоря 2а |
Число витків полюса паралельної обмотки, |
|
МП-22 |
4,5 |
1100 |
26 |
0,87 |
168 |
856 |
2 |
1750 |
|
Магнітний потік полюса Ф*10 корисний, Вб |
Номінальний струм збудження паралельної обмотки, А |
Максимально допустима швидкість, Об/хв |
Момент інерції якоря І,кг*м |
Маса двигуна Q, кг |
||||
|
0,609 |
0,955 |
3100 |
0,155 |
200 |
2.2 Розрахунок габаритних розмірів двигуна постійного струму паралельного збудження МП-22.
1.Визначаємо відношення:
(1)
2.Вибираємо діаметр якоря по кривій на мал. 13 :
D=18см
Вибираємо найближчий нормалізований діаметр по таблиці 1:
D=182см
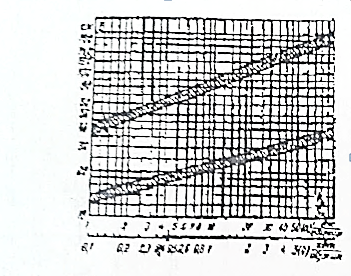
Мал.13 Діаметр якоря двигуна постійного струму в залежності від Pn/Nn.
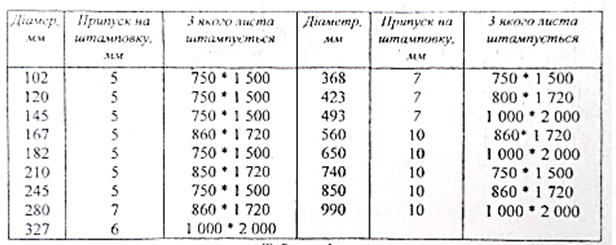
Таблиця 1.
3.Знаходимо число полюсів по мал. 14:
2р=4
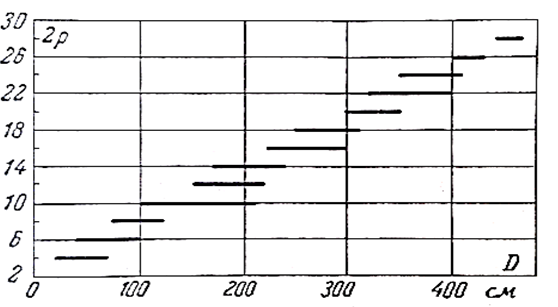
Мал.14 Число полюсів двигуна постійного струму.
4.Приймаємо попередні значення електромагнітних навантажень:
Магнітна індукція в повітряному зазорі :
Вб=5500гс
Лінійне навантаження якоря :
А=200 А/см
5.Розрахунок потужності якоря по таблиці 2:
(2)
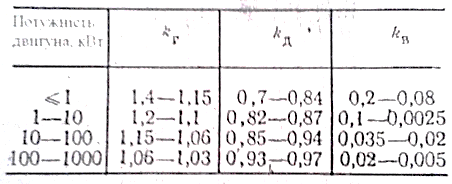
Таблиця 2.
6.Розрахунок довжини якоря:
(3)
де 0.65
7.Полюсне ділення якоря:
(4)
8.Відношення
(5)
9.Окружна швидкість якоря:
(6)
10.Повна довжина якоря:
=І==2.1
11.Приймаємо потужність суміжної машини:
(7)
де j=1.45 коефіціент наростання потужності.
2.3 Розрахунок пускових опорів двигуна постійного струму паралельного збудження МП-22.
1) =1221 об/хв. =0 Hm
2)=1100 об/хв. =39.1 Нm
Розрахунок пускових опорів ведемо графічним методом.
1.Задаємо момент переключення М1 М2:
М1=(1.1-1.2)=43.01
М2=(2-2.4)=93.84
2.Будуємо діаграму пуску.
3.Визначаємо відрізок АВ, який дорівнює опору якоря:
=0.87 Ом
4.Пускові опори знаходимо по графіку:
Ом
Ом
2.4 Розрахунок робочих та механічних характеристик двигуна постійного струму МП-22.
Розрахунок робочих характеристик.
=U,
=0.105 М
|
n, об/хв |
1221 |
1200 |
1080 |
1060 |
1040 |
1020 |
1000 |
|
М, Нm |
0 |
18 |
33 |
50 |
65 |
80 |
94 |
|
I,A |
0 |
11 |
20 |
30 |
39 |
48 |
57 |
|
, кВт |
0 |
2.4 |
4.4 |
6.6 |
8.6 |
10.6 |
12.5 |
|
, кВт |
0 |
2.3 |
3.7 |
5.6 |
7 |
8.6 |
9.9 |
|
0 |
0.96 |
0.84 |
0.94 |
0.82 |
0.81 |
0.79 |
Розрахунок механічних характеристик.
1.Визначаємо швидкість холостого ходу :
(об/хв) (12)
де =26-0.955=25.045 (А)
=0
2.Визначаємо номінальну швидкість і номінальний момент:
(13)
У схемі реверсного управління регулювальним двигуном постійного струму паралельного збудження з паралельним включенням контакторів прискорення передбачені апарати, що забезпечують його автоматичний пуск і динамічне гальмування.
При включених двох однополюсних вимикачах SA2,1 i SA2,2 якір контактора КМ2 втягнутий, а його замикаючі контактор КМ2.1 замикає регулюючий реостат R2 на коротко, що забезпечує найбільший струм збудження і спрацьовування реле ослаблення поля КА2, що замикає при цьому свої замикаючі контакти КА2.1, які знаходяться в ланцюзі обмотки реле напруги КV2.
Перед пуском двигуна включають два однополюсні вимикачі SA1.1, SA2.2,натискаючи кнопку SB1,що приводить до включення обмотки реле напруги KV2 і самоблокуванню що її замикають контактами КV2.1. Пуск здійснюється натисненням пускової кнопки SB3 або SB4 .
Натиснення пускової кнопки SB3 викликає включення контакторів KM3 і KM4, внаслідок чого якір двигуна приходить в обертання при повністю введених пускових резисторах Одночасно з цим допоміжні розмикаючі контакти КМ3 розмикають ланцюг обмотки реле прискорення КТ1, допоміжні замикачі контакти КМ3 готують включення котушок контакторів прискорення КМ7. КМ8, КМ9, а допоміжні замикаючі контакти шунтують розмикаючі контакти реле гальмування КТ, що забезпечує живлення котушок контакторів при розмиканні контактів реле гальмування.
Після включення контакторів КМ3 і КМ4 реле прискорення КТ2 і КТ3 миттєво розмикають свої розмикаючі контакти КТ2.1 і КТ3.1, обслуговуючі ланцюги котушок контакторів КМ8 КМ9. По закінченні встановленого часу реле прискорення КТ1.1 замикає свої розмикачі контакти із сповільнювачем , що діє при поверненні, і включає котушок контактора прискорення КМ7, головні замикаючі контакти КМ7.1 якого шунтують пусковий резистор Потім знеструмлене реле прискорення КТ2 через певний проміжок часу замикає свої контакти КТ2.1. Захист установки здійснюється наступними апаратами максимальна струмова в головному ланцюзі – реле, від обриву ланцюга збудження- реле, від неприпустимого зниження напруги живленої мережі – реле від коротких замикань в ланцюзі управління – запобіжниками .
Зупинка двигуна здійснюється натисканням кнопки SB2, в підсумку чого відключаються контактори КМ3 і КМ4, а також контактори прискорення КМ7.1, КМ8.1, КМ9.1, після чого замкнуті допоміжні розмикаючі контакти КТ3.1 включають котушку контактора КМ2, яка своїми замикаючими контактами КМ2.1 закорочує регулювання реостата R2M.
Двигун постійного струму паралельного збудження МП-22