ЗАГАЛЬНІ ВІДОМОСТІ ПРО АВТОМАТИЧНЕ УПРАВЛІННЯ МЕТАЛОРІЗАЛЬНИМ ОБЛАДНАННЯМ
ЗАГАЛЬНІ ВІДОМОСТІ ПРО АВТОМАТИЧНЕ УПРАВЛІННЯ МЕТАЛОРІЗАЛЬНИМ ОБЛАДНАННЯМ
1.1. Основні поняття та визначення
Автоматичне управління в машинобудуванні здійснюється за допомогою систем автоматичного управління (САУ), що визначаються як динамічні системи, призначені для управління технологічними операціями, які виконуються робочими органами металорізального обладнання. Підкреслюючи узагальнюючий характер викладення матеріалу, відзначимо, що принципи побудови САУ не залежать від фізичної природи процесів, що управляються, а базуються тільки на взаємозв'язках між вхідними та ихідними величинами.
Будь-яка САУ містить об'єкт, що управляється (ОУ) і регулятор (Р) (рис. 1.1).
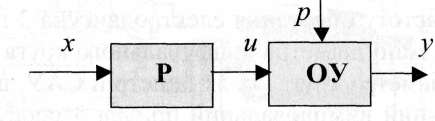
Регулятор (Р) під дією вхідного сигналу виробляє керуючий вплив w, що змінює стан ОУ в бажаному напрямку, оцінюваному за вихідною величиною або метою управління у. Під об'єктом, що управляється, розуміють механізм, вузол або процес, на які впливають для досягнення мети управління. Будь-яка фізична система вважається такою, що управляється, коли можна змінювати величину виходу, діючи на вхід. Проходження сигналу в САУ визначається напрямом стрілок на схемі.
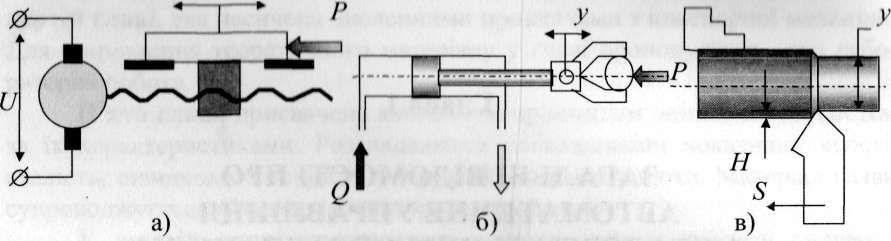
Під час функціонування САУ на ОУ діють різноманітні зовнішні сигнали - збурення , що заважають досягненню мети управління. Наприклад, для ОУ, зображених на рис. 1.2, керуючими впливами і збуреннями є: а) супорт верстата - напруга U живлення електродвигуна і зовнішня сила опору; б) гідравлічний циліндр - витрата Q масла і технологічне навантаження Р; в) процес точіння - подача S і припуск Н.
Регулятор (Р), або автоматичне управляюче пристосування, виробляє управляючий вплив на основі інформації про передбачувану поведінку ОУ у
відповідності до його математичної моделі (апріорної інформації) або на основі інформації, що надходить з ОУ безпосередньо и ході управління.
Залежно від цього визначають два основних принципи управління: в першому випадку управління проводиться за збуренням, а в другому - за помилкою, а САУ, що використовують ці принципи, поділяються, відповідно, на розімкнені і замкнені.
1.2. Принципи управління
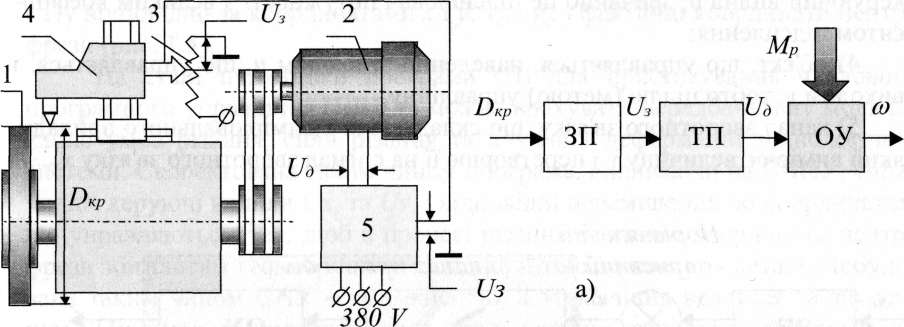
Вивчення принципів управління зручно провести на прикладі САУ швидкістю різання при шліфуванні (рис. 1.3).
Відомо, що зменшення діаметра шліфувального кругу 1 внаслідок його зносу і правки призводить до зменшення швидкості різання. Для її стабілізації необхідно регулювати частоту обертання електродвигуна 2 головного руху зворотно пропорційно зміні діаметра шліфувального круга 1. З метою вимірювання фактичного діаметра круга, та як пристрій САУ, що задає, використаний потенціометричний вимірювальний прилад 3 переміщення, бігунок якого зв'язаний з повзуном 4 приладу, що править шліфувальний круг.
В розімкненій САУ (рис. 1.3, а) сигнал U39 що виробляється вимірювальним приладом З (ЗП), надходить на керуючий вхід тиристорного перетворювача 5 (ТП), навантаженням якого є двигун 2 (ОУ). Бажана початкова швидкість різання може встановлюватися попередньою настройкою потенціометра 3 за даними вимірювальних приладів. Головним збуренням для об'єкту, що управляється, є момент р від сили різання. Зміни моменту призводять до зміни швидкості різання у відповідності з динамічними властивостями системи та електромеханічною характеристикою двигуна. Тому функціональне призначення системи - стабілізація швидкості різання - в цьому випадку залежить від збурення, що знижує її експлуатаційні показники.
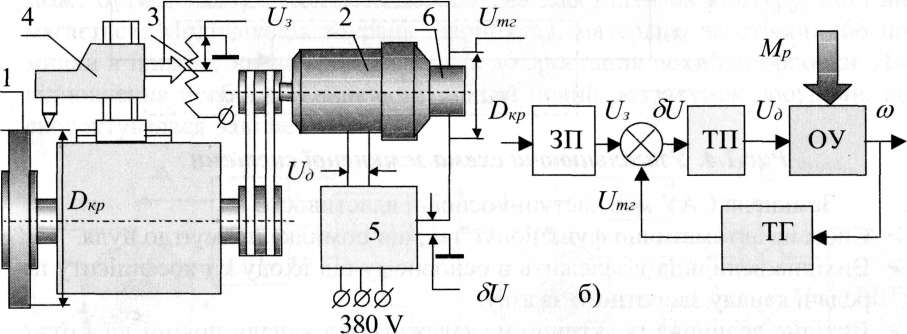
Для перетворення цієї САУ на замкнену необхідно включити в неї зустрічний потік інформації за рахунок зворотного зв'язку вимірювальних приладів зі входом системи. Як такий вимірювальний прилад частоти обертання двигуна 2 використаний тахогенератор 6 (ТГ) (рис. 1.3, б) який, як відомо, виробляє напругу Um2, пропорційну частоті обертання. Тахогенератор 6 так зв'язаний із потенціометром 3, що на вхід тиристорного перетворювача 5 надходить сигнал, пропорційний помилці SU=U3 - Um2. В цій системі модифікація частоти обертання двигуна при зміні збурення Мр призведе до відповідної зміни величини сигналу Umz зворотного зв'язку і модифікації помилки SU. Тиристорний перетворювач відповідно змінить керуючий вплив, прикладений до електродвигуна так, щоб помилка залишалася в певних, достатньо малих межах. При цьому частота обертання двигуна стабілізується.
Таким чином, за допомогою зворотного зв'язку, одержують чудову властивість САУ, яка визначається тим, що збурення, які діють на елементи САУ, що охоплені зворотним зв'язком, практично не впливають на точність регулювання, а чутливість відносно керуючого впливу завжди зберігається.
Отже, замкнені системи використовують принцип зворотного зв'язку, який полягає в наступному. Бажана або оптимальна поведінка об'єкта порівнюється з його дійсною поведінкою і при цьому помилка, що одержується, використовується для того, щоб остання прямувала до нуля або залишалася в заданих межах.
Замкнена система, що функціонує відповідно до цього принципу, може бути представлена за допомогою схеми рис. 1.4, що містить:
- пристрій (елемент), що задає, (ЗЕ), який перетворює вхідний сигнал хв на величину тієї ж фізичної природи, що і величина х53. Звичайно величина називається вхідним сигналом САУ;
- порівняльний пристрій, що виробляє сигнал помилки, безпосередньо прикладений до прямого каналу (S-х - х33);
- канал прямої дії, що являє собою керовану систему, яка виробляє керуючий вплив и; звичайно це підсилювач потужності з великим коефіцієнтом підсилення;
- об'єкт, що управляється, наведений зі входом и, що управляється, і виходом у, тобто ціллю (метою) управління;
- канал зворотного зв'язку, що складається з вимірювального приладу, який вимірює величину у і перетворює її на сигнал зворотного зв'язку х55.
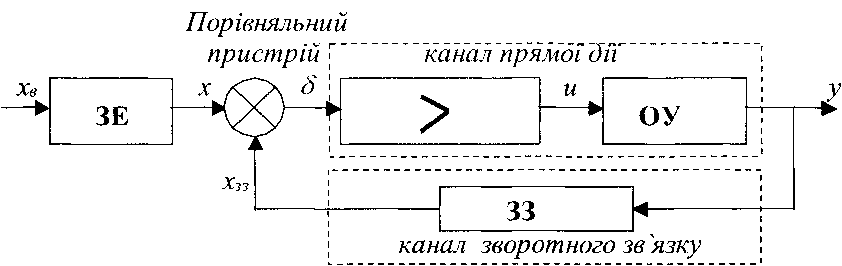
Рис. 1.4. Узагальнююча схема замкненої системи
Замкнена САУ має наступні основні властивості:
- Система автоматично функціонує так, що помилка прямує до нуля.
- Вихідна величина у залежить в основному від входу і коефіцієнту передачі каналу зворотного зв'язку.
- Вихідна величина практично не залежить від каналу прямої дії і отже, від збурень, які діють на нього.
Таким чином, замкнені САУ мають суттєві переваги у порівнянні з розімкненими. Проте останні набагато простіші і виникає резонне запитання: "Чи можна забезпечити якість регулювання, що вимагається, за допомогою розімкнених систем?" Позитивна відповідь буде у тому випадку, коли вдасться врахувати всі збурення, які діють на систему, або принаймні головні з них, оскільки управління в таких системах провадиться з урахуванням передбачуваної поведінки ОУ, тобто за апріорною інформацією. Пояснимо це положення на прикладі управління контурним фрезеруванням на верстаті з ЧПУ.
Відомо, що головним збуренням при контурному фрезеруванні є змінні умови різання на різних ділянках контуру. При русі центра фрези (в оберненій схемі) за геометричною еквідистантою до контуру, сила різання на ділянках, окреслених дугами кола, значно відрізняється від сили різання на прямолінійних ділянках. Тому, навіть за умови компенсації похибки різання, викликаної пружними деформаціями на прямолінійних ділянках, вона буде з'являтися на увігнутих ділянках контуру:

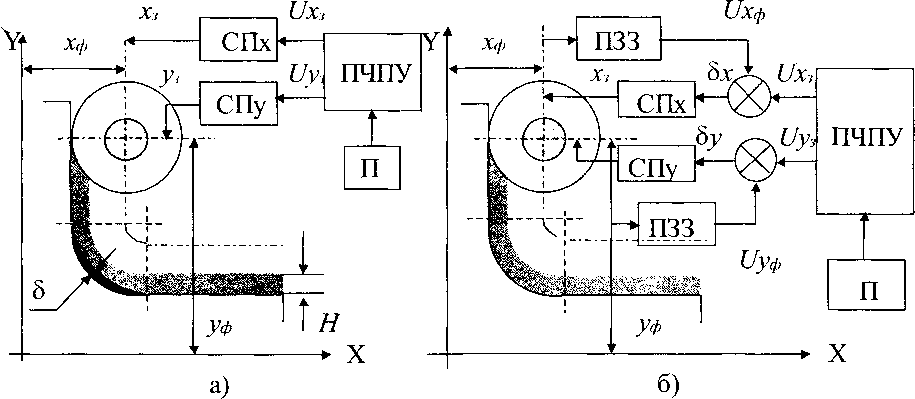
де х3, у3 - переміщення, що виконуються сервоприводами подач СПх та СПу відповідно за координатами і у; Хф і у - фактичні координати центра фрези (рис. 1.5).
Рис. 1.5. Схеми управління контурним фрезеруванням на верстаті з ЧПУ: а) - за збуренням; б) - за помилкою
На етапі підготовки програми (П) для пристосування числового програмного управління (ПЧПУ) можна врахувати передбачувану модифікацію умов різання, сили різання та пружних деформацій технологічної системи. Скоректована таким чином програма, впливаючи на ПЧПУ, спричинює керуючі впливи Ux3 та Uy3 і відповідні переміщення по координатах, що управляються, так, щоб в процесі різання фактичні координати центра фрези збігалися з геометричною еквідистантою до контуру деталі. Побудована таким чином САУ є розімкненою, а управління ведеться за збуренням. Якщо модель процесу, покладена в основу розрахунків, адекватна, то може бути досягнута точність обробки на всіх ділянках контуру, що і вимагається. Модифікація збурень, наприклад, матеріалу заготівки, або помилки в їхньому визначенні, наводять до зростання похибки обробки. Для відновлення необхідної якості потрібний новий розрахунок програми, що скоректувалася раніше.
Замкнена САУ одержується в результаті встановлення вимірювального приладу зворотного зв'язку (ПЗЗ), іцо визначає фактичне положення центру інструменту в процесі обробки (див. рис. 1.5, б). В такій САУ програма розраховується за інформацією про геометричну еквідистанту без урахування будь-яких збурень. На сервоприводи подач надходять сигнали ПОМИЛОК і }\ ЩО виробляються при порівнянні сигналів UXj і Uy3, пропорційних заданим координатам геометричної еквідистанти, з сигналами l/ і 1/уф, пропорційними фактичним координатам центра фрези. Функціонування САУ направлене на постійне відпрацьовування цих помилок в певних, допустимих точністю обробки, межах.
1.3. Цілі автоматичного управління
Завдяки автоматичному управлінню в металообробці можна досягати цілі: стабілізації різноманітних фізичних величин регульованого процесу, програмного управління вихідними величинами, стеження за будь-якими зовнішніми факторами, а також адаптації. Адаптація означає пристосуван ня САУ до внутрішніх або зовнішніх умов, що постійно змінюються, і мо же мати на меті екстремальне управління, автоматично підтримуючи де який критерій процесу на оптимальному рівні, мету самонастроювання САУ щодо її параметрів чи структури тощо.
Залежно від визначених цілей САУ поділяються на: системи стабілізації; системи програмного управління; системи стеження; екстремальні системи; системи з самонастроюванням параметрів та з самонастроюванням структури (системи, що самоорганізуються). Останні три види САУ належать до адаптивних систем [3, 14, 23
Системи стабілізації використовуються для підтримання на постійному рівні сили або потужності різання, швидкості різання та інших вихідних параметрів процесу різання. Такі САУ можуть бути як розімкненими, гак і замкненими. В останньому випадку точність стабілізації значно вище і слабо залежить від збурень. Головною особливістю САУ цього виду є те, що вплив, який задає, - аналог величини, що стабілізується, - на вході системи є постійним. Прикладом такої САУ може бути розглянута вище САУ стабілізації швидкості різання при шліфуванні.
Системи програмного управління призначені для управління вихідними величинами згідно з заздалегідь заданою програмою. Програма може задаватися будь-яким засобом - за допомогою кулачка, копира, перфострічки, програмованої запам'ятовуючої мікросхеми і виконуватися в функції часу або вихідної (ведучої) координати. Наприклад, піч для термообробки має систему програмного управління температурним режимом у функції часу, а привід формоутворюючого руху верстата з ЧПУ - у функції координати, що задається. Задана програмою траєкторія руху утворюється за рахунок певного з'єднання рухів по координатам, що управляються, причому швидкість руху не впливає на це співвідношення, а визначає величину контурної подачі.
Системи програмного управління є основними елементами верстатів з ЧПУ, роботів, копіювальних верстатів. Вони можуть бути розімкненими і замкненими. Так, САУ програмного управління приводами формоутворюючого руху верстатів з ЧПУ і роботів першої генерації були розімкненими (рис. 1.8, а). САУ має пристрій введення (ПВ) програми (П), що управляє електронним комутатором (ЕК), навантаженням якого є бобіни крокового двигуна 1. Вал крокового двигуна 1 зв'язаний з гідравлічним підсилювачем моменту 2, який переміщає об'єкт 3, що управляється, відповідно до заданої програми, що виробляється системою ЧПУ. САУ не охоплена зворотним зв'язком і тому її експлуатаційні характеристики обмежені порівняно із замкненою системою (рис. 1.8, б).
Управління поворотним столом 1 здійснюється відповідно до програми (П), що надходить через пристрій введення (ПВ), наприклад, у вигляді певного числа або кількості імпульсів на вхід лічильника (JT), що їх підсумовує. Вихід цього лічильника через цифро-аналоговий перетворювач (ЦАП) зв'язаний з входом комплектного електроприводу, що складається з керованого (тиристорного) перетворювача (ТП), високомоментного електродвигуна 3 і тахогенератора 2. Ясно, що комплектний електропривод також є замкненою САУ. Стіл 1 повертається і кодовий або імпульсний вимірювальний прилад 4 посилає імпульси на від'ємний вхід лічильника Л. Рух триває доти, доки на виході лічильника не з'явиться нуль, що означає виконання команди програми. Для управління напрямком повороту пристрій введення зв'язаний з ЦАП для зміни знака напруги на його виході.
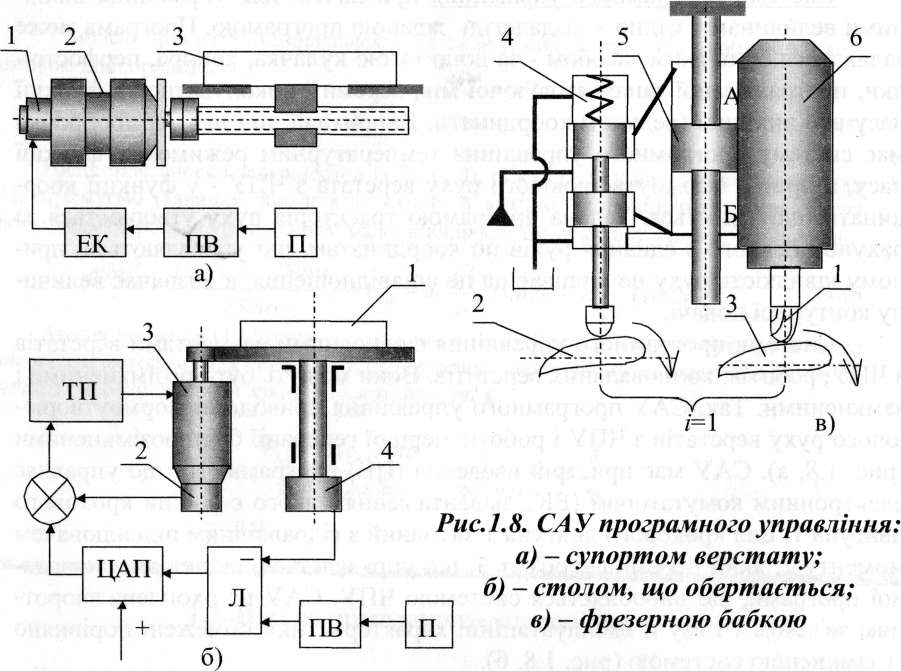
До систем програмного управління можна віднести також САУ копіювальних верстатів (рис. 1.8, в). Гідравлічна САУ здійснює переміщення фрези 1 відповідно до профілю копира 2. Деталь 3 і копир 2 приводяться в синхронний рух спеціальним пристосуванням подачі. При русі золотника 4 вгору порожнина А гідроциліндра 5 з'єднується з лінією тиску, а порожнина Б - з лінією зливу. Корпус гідроциліндра 5 та фрезерна бабка 6 також переміщаються вгору і переміщаючи корпус золотника 4, відновлюють рівновагу в системі. Так реалізується зворотний зв'язок в САУ.
Головною особливістю систем програмного управління є наявність програми та пристрою введення програми.
Системи стеження призначені для відтворення заздалегідь невідомих впливів, що задаються. До таких систем належать САУ роботів - маніпуляторів, роботів складального обладнання, різноманітні системи дистанційного управління металорізальних верстатів. На рис. 1.9, а показана система стеження двосторонньої дії копіювального маніпулятора [21].
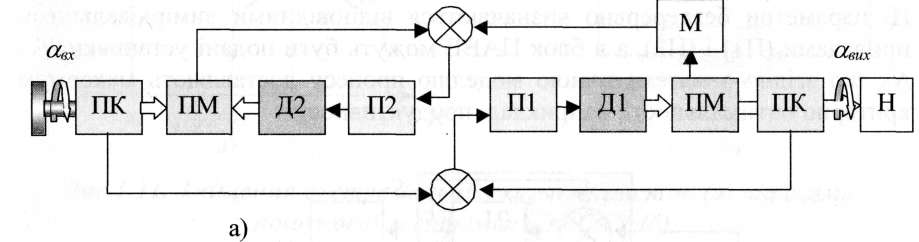
Маніпулятор оснащений двома контурами управління. Перший контур утворює замкнену САУ рухом (авих) навантаження згідно з положенням (авх) держака управління оператора. Він складається з вимірювального приладу кутів (ПК), пристрою порівняння, підсилювача потужності (ПІ) і двигуна (Д1). Другий контур містить вимірювальний прилад моментів(ПМ), масштабуючий пристрій (), пристрій порівняння, підсилювач (У2) і двигун (Д2). Цей контур служить для передачі зусиль, які діють на робочий орган маніпулятора, в певному масштабі оператору. Завдяки цьому система створює ефект присутності оператора в робочій зоні, що поліпшує умови управління.

Рис. 1.9. Схеми систем, що стежать: а) - маніпулятора
подвійної дії; б) - робочого органу верстата
САУ переміщення робочих органів важких металорізальних верстатів показана на рис. 1.9, б. Сигнал дистанційного управління передається від сельсин-вимірювального приладу (СВ) до сельсин-приймача (СП), працюючого у трансформаторному режимі. В результаті сигнал на виході підсилювача-перетворювача (ПП) є пропорційним різниці між кутовими положеннями роторів сельсинів. Двигун (Д) відпрацьовує цю різницю, обертаючи навантаження (Н) через редуктор (Р) так, що його кутове положення відслідковує кутове положення ротора сельсин-вимірювального приладу.
Головною особливістю систем стеження, є наявність приладу, що сприймає вплив, який задається, відповідно до його фізичної природи (переміщення, напруга, температура і т. ін.).
Екстремальні системи автоматично виробляють вплив, що задається, завдяки чому підтримують об'єкт, що управляється, в оптимальному режимі роботи відповідно до заданою мети або критерію оптимальності. Щодо способу визначення екстремуму вихідної величини ці системи поділяються на безпошукові і пошукові.
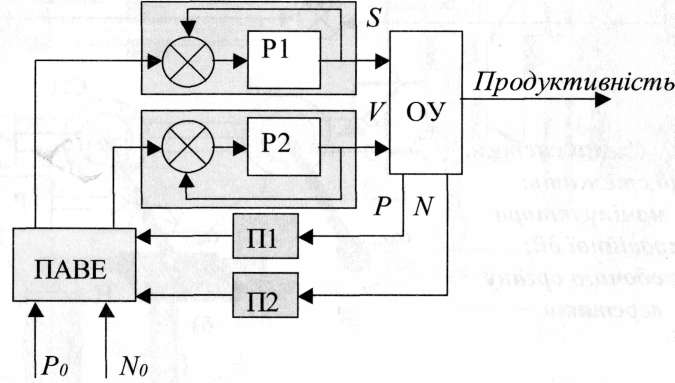
У безпошукових САУ екстремум знаходиться за математичною моделлю об'єкту, що управляється, яка зв'язує критерій оптимальності, а також контрольовані параметри з регулюючими впливами. САУ включає до себе, як правило, обчислювальне пристосування, що визначає алгоритм управління. Наприклад, екстремальна САУ процесом точіння здійснює регулювання водночас за двома каналами: подачі S і швидкості V різання (рис. 1.10). Ці регулюючі впливи формуються замкненими САУ відповідно до сигналів, що задають, які виробляються пристосуванням автоматичного визначення екстремуму (ПАВЕ) за контрольованими параметрами процесу точіння, наприклад, складовою Ру сили різання та потужністю N різання. Ці параметри безперервно визначаються відповідними вимірювальними приладами (ПІ) і (П2), а в блок ПАВЕ можуть бути подані установки Р0 і 0, що згідно з математичною моделлю процесу доставляють максимум критерію оптимальності, наприклад, продуктивності.
Рис. 1.10. Схема без пошукової екстремальної С А У
Неточності у визначенні математичної моделі суттєво знижують ефективність таких систем. Пошукові адаптивні САУ більш досконалі. Як правило, в процесі роботи вплив зовнішніх факторів приводить до зміщення екстремальних характеристик ОУ. На рис. 1.11, а показаний переріз поверхні критерію оптимальності у по одній з координат х, що управляється, для моментів часу tj, t2 і ^з- Зрозуміло, що цим моментам часу відповідають різні значення координати, що управляється, яка доставляє максимум критерію оптимальності.
САУ з автоматичним пошуком екстремуму повинна забезпечити максимум або мінімум критерію оптимальності у течію усього часу роботи. Це досягається, як правило, введенням у канал регулювання додаткового впливу - пошукового гармонічного сигналу (ПС) (рис. 1.11, б). Пристосування автоматичного пошуку екстремуму (ПАВЕ) визначає напрямок зростання або зменшення критерію оптимальності і організує рух у бік максимуму (мінімуму) за координатою, що управляється, доти, доки похідна функції критерію за цією координатою не буде дорівнювати нулю, або стане близькою до нуля.
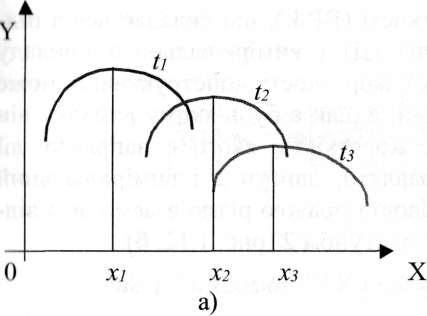
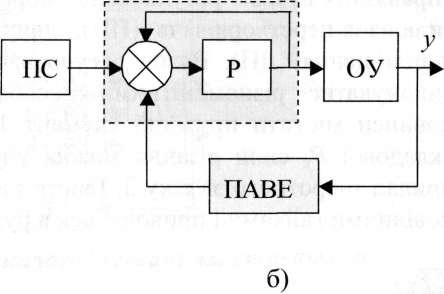
Рис. 1.11. Зміщення екстремальних характеристик (а) та схема пошукової екстремальної САУ (б)
Недоліками пошукової екстремальної САУ є необхідність безпосере днього контролю критерію оптимальності і порівняно великий час виходу на оптимальний режим.
Системи з самоналагоджуванням параметрів виконують регулювання з автоматичним налагодженням параметрів регулятора за обраним критерієм якості роботи. Необхідність в таких САУ виникає тоді, коли вони працюють в умовах чинності сильних збурень, що призводить до істотного погіршення якості регулювання. Оскільки ці збурення мають випадковий характер, їх кількість і закони модифікації точно не відомі, не можна заздалегідь встановити оптимальні значення параметрів САУ або розрахувати закон (програму) їх модифікації. Отже, самонастроювання параметрів САУ повинне здійснюватися не заданим заздалегідь чином.
Найбільш широке застосування в металообробці знайшли САУ з самонастроюванням параметрів, в яких не виконується аналіз критерію якості роботи системи, а переналагодження параметрів регулятора здійснюється залежно від зовнішніх збурень за певним законом роботи обладнання, що налагоджується. Прикладом такої системи з самонастроюванням параметрів регулятора може служити САУ з контуром програмного регулювання жорсткості (рис. 1.12, а). Метою є підтримання на постійному рівні жорсткості технологічної системи в зоні різання, що забезпечує сталість пружних деформацій і можливість їх компенсації відповідним налагодженням. Програма управління жорсткістю інструменту виконується в функції поточної координати і розрахована для певного поєднання довжини і діаметра деталі, що обробляється. При відхиленні довжини і діаметра від розрахункових значень виникає необхідність у корекції програми. Ця корекція здійснюється автоматично за рахунок управління коефіцієнтами передачі масштабного дільника (МД) по сигналам вимірювального приладу координат (ВПх) і (ВПу), відповідно до довжини і діаметра деталі, що обробляється.
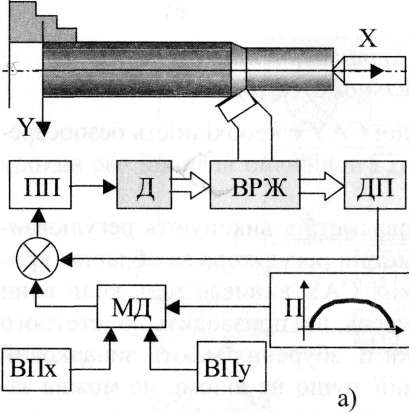
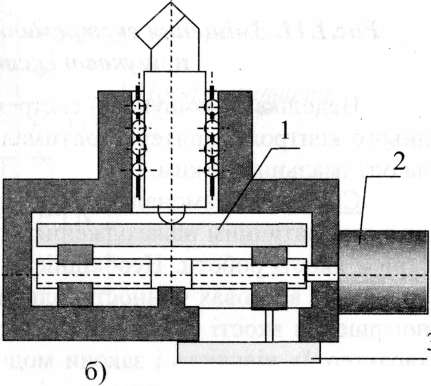
До складу САУ входить також система стеження автоматичного управління вузлом регульованої жорсткості (ВРЖ), що складається з підсилювача-перетворювача (ПП), двигуна (Д) і вимірювального приладу переміщення (ДП). Вузол регульованої жорсткості конструктивно може виконуватися різноманітними способами, однак в будь-якому випадку він повинен містити пружний елемент 1, жорсткістю якого в напрямку дії складової Ру сили різання можна управляти, двигун 2 і вимірювальний прилад зворотного зв'язку 3. Гвинт з лівою і правою різзю взаємодіє з відповідними гайками і приводиться в рух двигуном 2 (рис. 1.12, б).
Рис. 1.12. Схема системи з самоналагоджуванням параметрів (а) та вузол регульованої жорсткості (б)
В системах з самонастроюванням структури заздалегідь не заданим чином виконується автоматична модифікація структури з метою оптимізації обраного критерію якості роботи САУ. В найпростішому випадку роботу такої САУ можна проілюструвати на наступній схемі (рис. 1.13).
У замкнену САУ, яка складається з пристрою, що задає (ЗП), автоматичного управляючого приладу (АУП), об'єкту (ОУ), що управляється, включене спеціальне пристосування аналізу (ПА) заданого критерію якості. Це пристосування управляє перемикальним блоком (ПБ), що в деякій логічній послідовності підключає до каналу регулювання регулятори Р1, Р2 або РЗ з наявного набору. При цьому у пристосуванні аналізу запам'ятовуються та порівнюються результати регулювання з метою вибору найбільш вдалої структури. Ясно, що така САУ вимагає певного часу для проведення подібного аналізу і може застосовуватися для управління порівняно повільними процесами. Системи з самоналагоджуванням структури мають підвищену 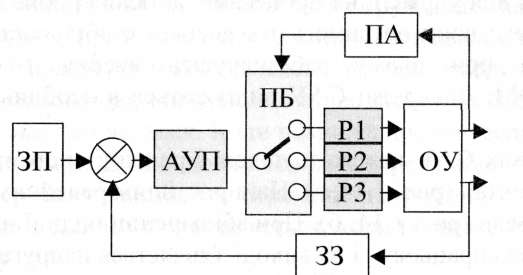
надійність завдяки можливості дублювання функцій регуляторів, які вийшли з ладу, однак при цьому задана якість роботи, як правило, не забезпечується.
Рис. 1.13. Схема САУ з самоналагоджуванням структури
1.4. Класифікація систем автоматичного управління
Усі розглянуті залежно від цілей управління види систем класифікуються також за характером внутрішніх динамічних процесів. За такою класифікацією існують лінійні і нелінійні САУ, системи прямої і непрямої дії, безперервні (аналогові) і дискретні [3].
До лінійних належать САУ, всі процеси в яких з достатнім ступенем точності описуються лінійними рівняннями. Якщо хоча б в одному елементі САУ суттєво порушується лінійність його характеристики, вся система розглядається як нелінійна. Відверто кажучи, на практиці не зустрічається абсолютно лінійних систем і об'єктів. Однак, враховуючи конкретний діапазон роботи САУ, її характеристики замінюють лінійними, що дозволяє для їхнього розрахунку і синтезу використовувати порівняно простий апарат дослідження лінійних систем.
Під системами прямої дії розуміють регулятори, в яких вимірювальний пристрій безпосередньо впливає на регулюючий орган, використовуючи при цьому енергію самого об'єкту, що управляється. Класичним зразком такого регулятора може бути центробіжний регулятор швидкості. Кут відхилення вантажів, що обертаються за рахунок енергії двигуна через кінематичну передачу, перетворюється на переміщення заслінки подачі робочої суміші до двигуна. В системах непрямої дії обов'язково є підсилювальної перетворювальні пристрої, які використовують для регулювання зовнішні джерела енергії. Ці САУ можуть вирішувати значно більш складні завдання управління і тому мають незрівнянно більш широке застосування в сучасному металооброблювальному обладнанні.
Безперервні, або аналогові, САУ складаються з ланок та елементів, в яких безперервній модифікації вхідного сигналу відповідає безперервна модифікація вихідного. Прикладами таких систем можуть бути САУ, схеми яких наведені на рис. 1.2, 1.8, в, 1.9, а. Якщо хоча б в одному елементі САУ порушується безперервний зв'язок між вхідною і вихідною величинами, така система є дискретною. Дискретні САУ знаходять все більш широке застосування для управління процесами металообробки завдяки своїм суттєвим перевагам: вони не вимагають високої стабільності характеристик елементів і при цьому забезпечують високу точність, легко з'єднуються з ЕОМ. Дискретні САУ виділяються в особливий клас нелі нійних систем.
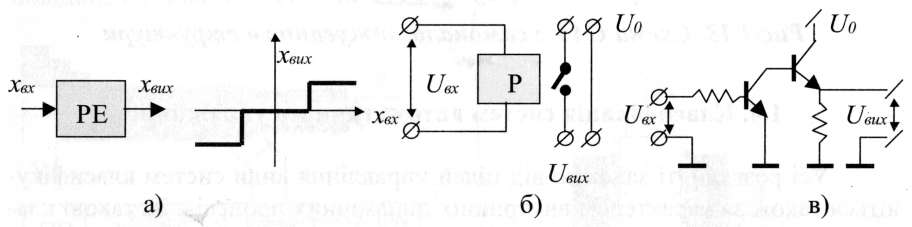
До дискретних САУ належать також і релейні системи, побудовані на релейних елементах (рис. 1.14, а). Найпростішим релейним елементом є електромагнітне реле (рис. 1.14, б). При збільшенні вхідної напруги до певної величини реле спрацьовує і на виході з'являється напруга Ueux=Uo.
Рис. 1.14. Релейні елементи: а) - схематичне зображення та характеристика; б) - електромагнітне реле; в) - транзисторний ключ
Використовують також безконтактні релейні елементи, наприклад, транзисторні ключі, у яких при подачі керуючого (вхідного) сигналу опір змінюється стрибком (рис. 1.14, в). Якість такого ключа характеризується відношенням опору в закритому стані до опору у відкритому стані. Ця величина може сягати 106, тому чутливість електронних ключів значно перевищую чутливість електромагнітних реле.
На релейних елементах може бути побудована, наприклад система
стеження (рис. 1.15).
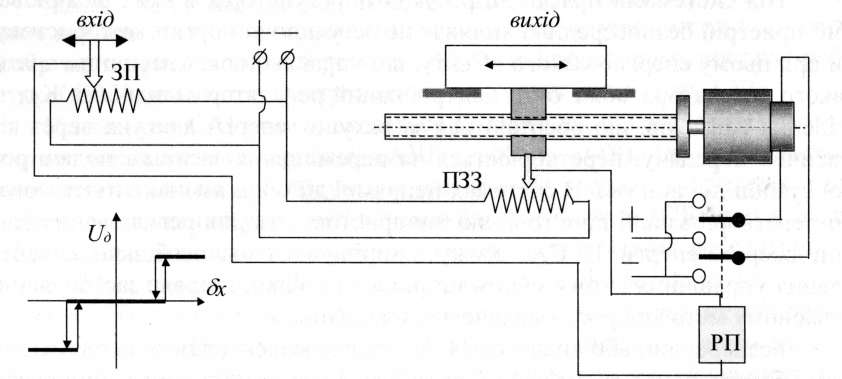
Рис. 1.15. Релейний привід стеження та його характеристика
Потенціометр, що задає, (ЗП) і потенціометр зворотного зв'язку (ПЗЗ) з'єднані за мостовою схемою і підключені до джерела постійної напруги Uі. У діагональ мосту ввімкнена бобіна поляризованого реле (РП).
Реле є трипозиційним і містить контактну групу, що підключає двигун постійного струму (Д) до джерела живлення. Напрямок спрацьовування реле згідно з його характеристикою залежить від знака керуючої напруги. Оскільки САУ є замкненою, напруга, що підводиться до бобіни РП пропорційна помилці і має той же знак. Коли помилка досягає величини порогу, реле спрацьовує і двигун Д підключається до джерела живлення так, що напрямок його обертання забезпечує переміщення робочого органу в напрямку зменшення помилки. Рух припиняється, коли помилка стає меншою за значення порогу.
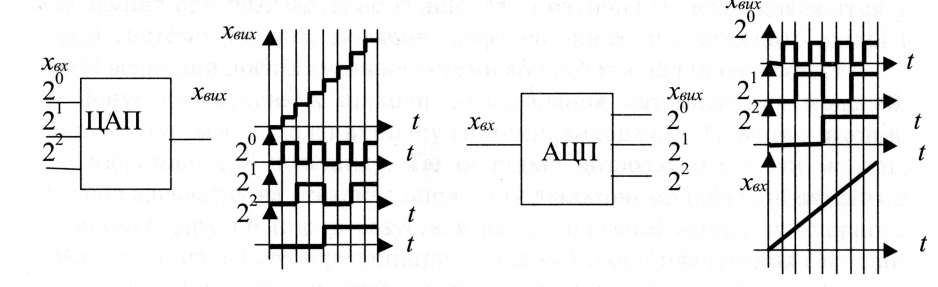
У дискретних системах для узгодження дискретної й аналогової частин і навпаки, використовують цифро-аналогові (ЦАП) та аналого-цифрові (АЦП) перетворювачі. ЦАП перетворює цифровий код на вході на аналогову величину, наприклад напругу, на виході. АЦП перетворює аналогову вхідну величину на цифровий, звичайно двійковий, код. Робота перетворювачів пояснюється діаграмами (рис. 1.16).
Рис. 1.16. Часові діаграми функціонування ЦАПІ АЦП
Цифровий привід стеження, що використовується у верстатах з ЧПУ і промислових роботах (рис. 1.17), складається з дискретної та аналогової частин.
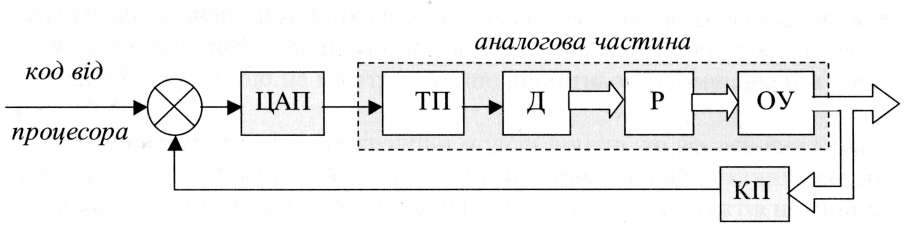
Рис. 1.17. Цифровий привід стеження
Аналогова частина будується на основі тиристорного або транзисторного перетворювача (ТП), двигуна постійного струму (Д), редуктора і об'єкту, що управляється - супорта верстата або робочого органу робота. Для підвищення точності роботи САУ в якості вимірювального пристрою зво ротного зв'язку використовують кодовий вимірювальний пристрій (КП).
Кодовий вимірювальний пристрій перетворює аналогову величину - переміщення об'єкта, що управляється, на цифровий код. САУ має вхід, який, звичайно, комутується з процесором. Для узгодження дискретної і аналогової частин в канал регулювання введений цифро-аналоговий перетворювач.
Інколи, при складних цілях управління, вплив, що задається, необхідно визначати розрахунком за математичною моделлю на основі інформації, яка одержується від вимірювального пристрою зворотного зв'язку. В цьому випадку виникає необхідність включення в контур регулювання ЕОМ, що перетворює всю систему на дискретну. Широко застосовують ЕОМ в контурі регулювання САУ також при створенні адаптивних екстремальних систем.
Інколи, при складних цілях управління, вплив, що задається, необхідно визначати розрахунком за математичною моделлю на основі інформації, яка одержується від вимірювального пристрою зворотного зв'язку. В цьому випадку виникає необхідність включення в контур регулювання ЕОМ, що перетворює всю систему на дискретну. Широко застосовують ЕОМ в контурі регулювання САУ також при створенні адаптивних екстремальних систем.
ЗАГАЛЬНІ ВІДОМОСТІ ПРО АВТОМАТИЧНЕ УПРАВЛІННЯ МЕТАЛОРІЗАЛЬНИМ ОБЛАДНАННЯМ