Система электромеханического привода манипулятора
Введение
Данная курсовая работа направлена на изучение системы электромеханического привода манипулятора. Необходимо изучить заданную САУ, провести оптимизацию с помощью программы Matlab, синтезировать нечеткий регулятор на базовом режиме работы системы из условий обеспечения показателей качества, провести анализ реакции системы на изменение момента. А также следует провести сравнительную оценку качества управления системы прототипа и нечеткой системы регулирования.
1. Построение модели САУ на линейном корректирующем устройстве
Исходя из задания, построим модель САУ без корректирующего устройства в среде Simulink.
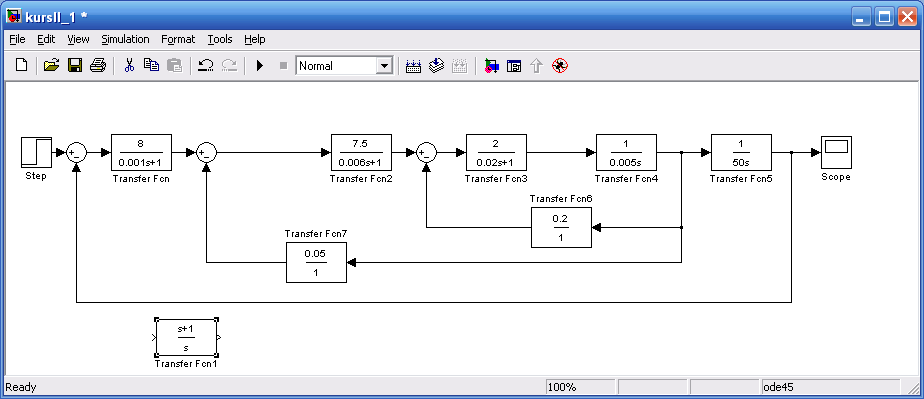
Рисунок 1. Структурная схема САУ в среде Simulink
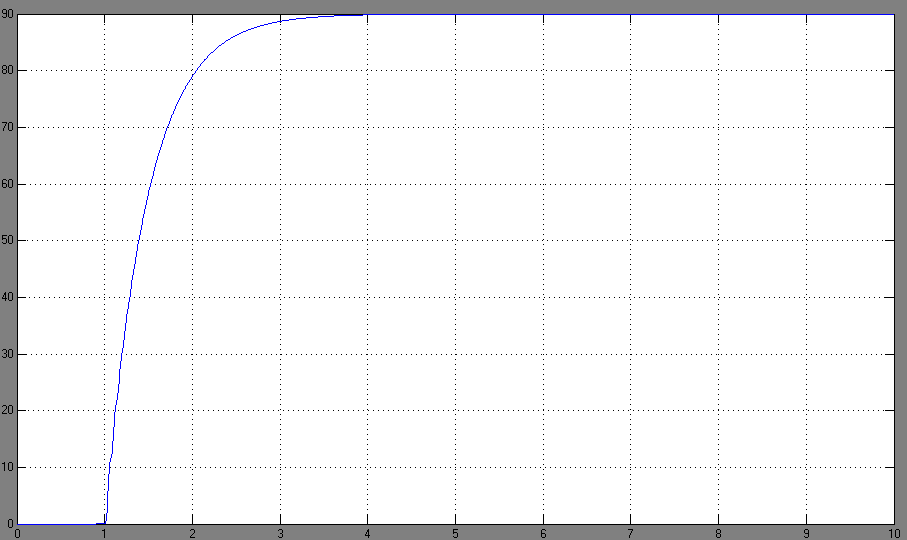
Рисунок 2. Переходный процесс нескорректированной системы
Далее построим модель САУ на линейном корректирующем устройстве. Для этого нам необходимо подобрать коэффициенты, которые будем находить при помощи блока NCD и PID регулятора (Рисунок 3).
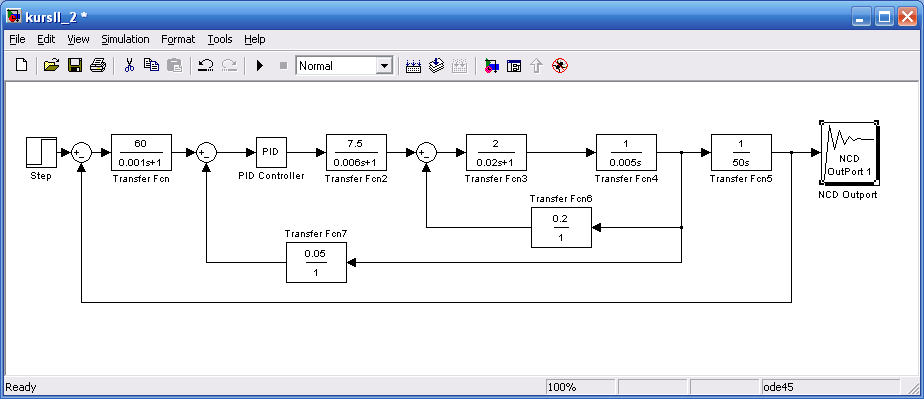
Рисунок 3. Структурная схема САУ с NCD блоком
Для нашего корректирующего устройства подходит PID регулятор (Рисунок 4).
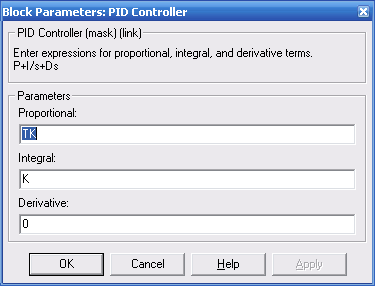
Рисунок 4. Настройка PID регулятора
Исходя из задания мы имеем ограничения:
- максимальное перерегулирование – не более 10%;
- время нарастания – не более 0.1-0.3 с;
- длительность переходного процесса – не более 0.5-0.7 с.
Зададим эти ограничения в окне NCD блока.
Для начала необходимо настроить NCD блок в меню Optimization -> Parameters, зададим параметры оптимизации TK и K, а также настроим ограничения в соответствии с заданием (Рисунок 5).
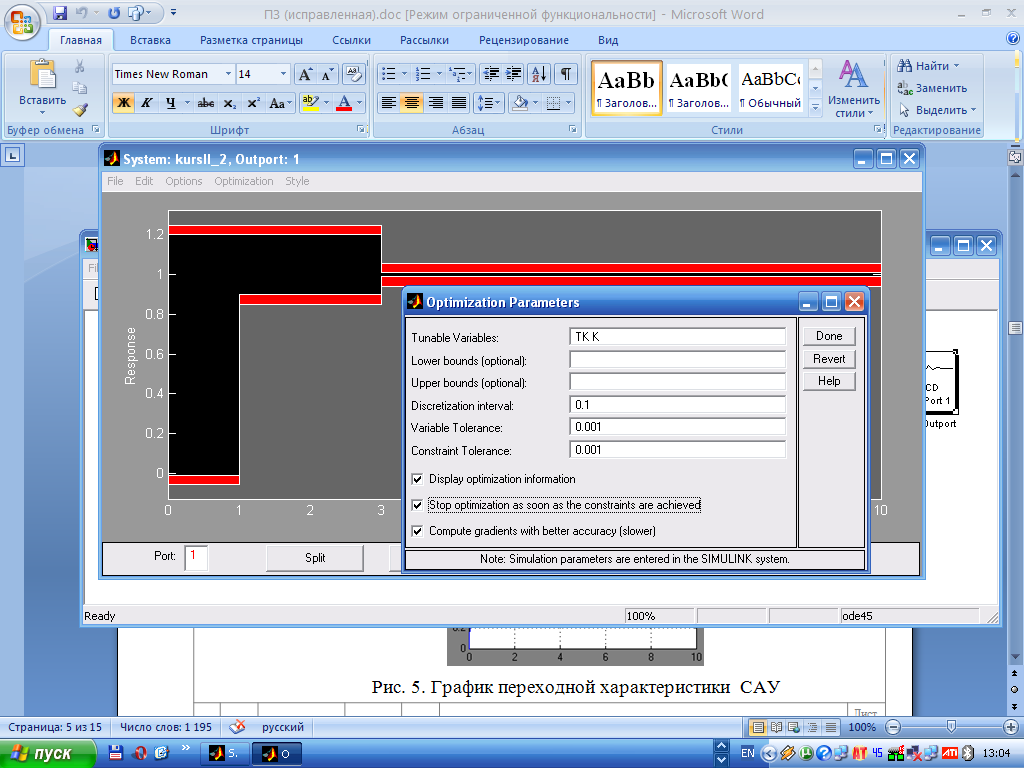
Рисунок 5. Окно настройки NCD блока
Далее в командной строке окна MatLab зададим начальные значения варьируемых параметров TK и K. После чего нажимаем кнопку Start блока оптимизации NCD.
В итоге будут сформированы несколько графиков оптимизированной передаточной функции корректирующего устройства (Рисунок 6).
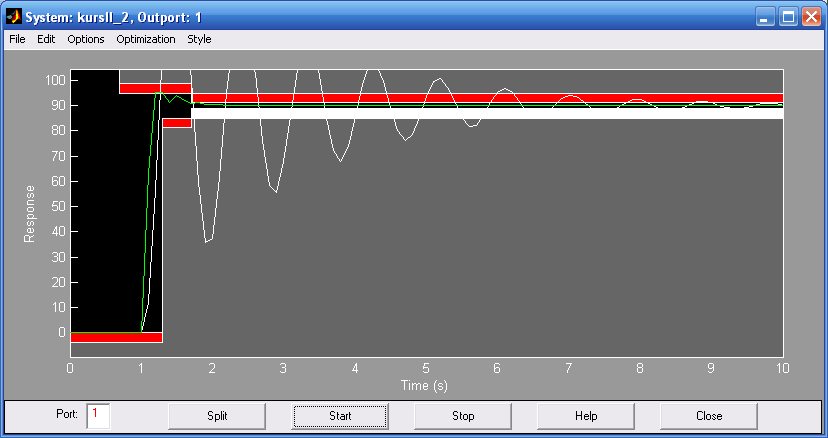
Рисунок 6. График оптимизированной передаточной функции корректирующего устройства
Далее значения оптимизированных параметров TK и K получаем из командного окна Matlab.
TK = 0.3746
K = 2.2752
Вводим корректирующее устройство (Рисунок 7).
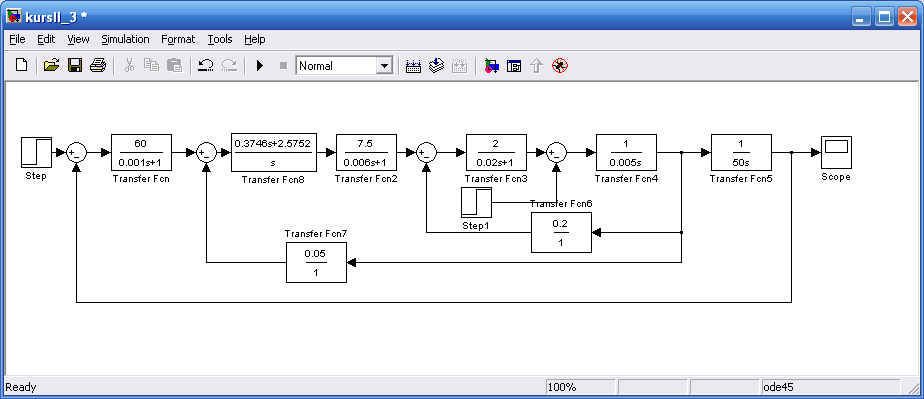
Рисунок 7. Структурная система САУ с корректирующим устройством
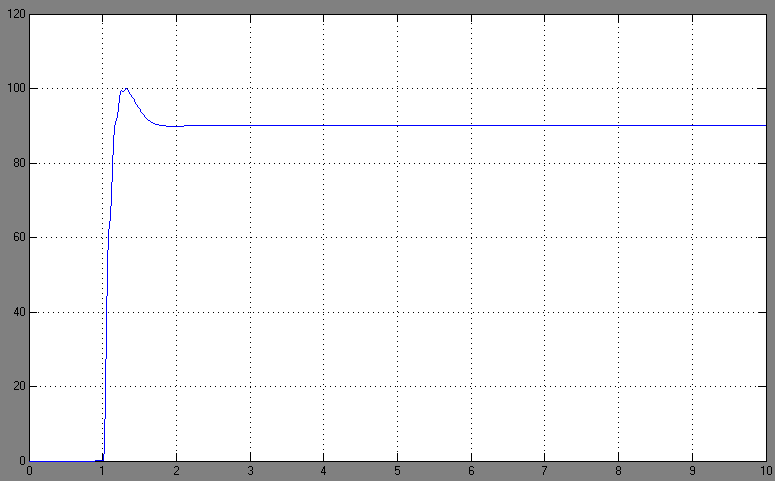
Рисунок 8. Переходный процесс САУ с корректирующим устройством
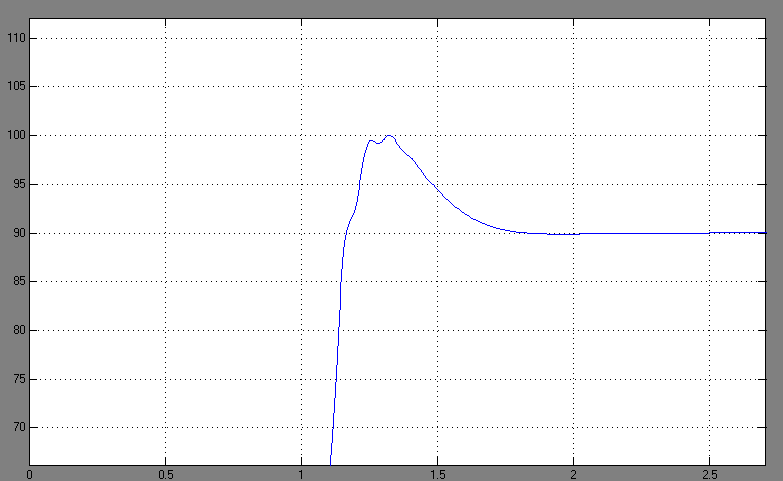
Рисунок 9. Переходный процесс
По графику переходного процесса (Рисунок 8, Рисунок 9) можно сказать что он соответствует заданным критерием качества:
Время нарастания: Tнараст=0.25
время регулирования: Трег=0.7
перерегулирование: рег=10 %
2. Построение САУ на элементах нечеткой логики
2.1 Нечеткий регулятор Fuzzy Logic
Для построения нечеткого регулятора воспользуемся прикладной программой MatLab FIS Editor, и блоком Fuzzy Logic Controller. (Рисунок10)
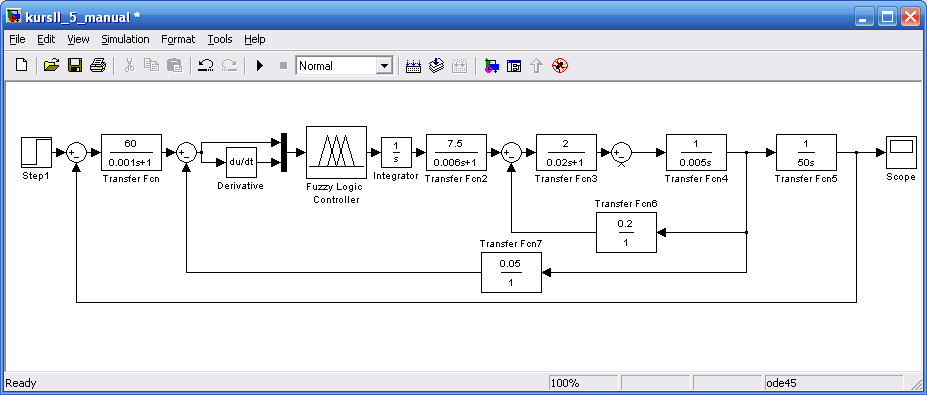
Рисунок 10. Структурная схема САУ с блоком Fuzzy Logic Controller
Вызов MatLab FIS Editor осуществляется командой fuzzy.
Структурно нечеткий регулятор имеет 2 входа и 1 выход: e – входное значение ошибки управления, de – входное значение производной по ошибке, du – выходное значение производной по управлению (Рисунок 11).
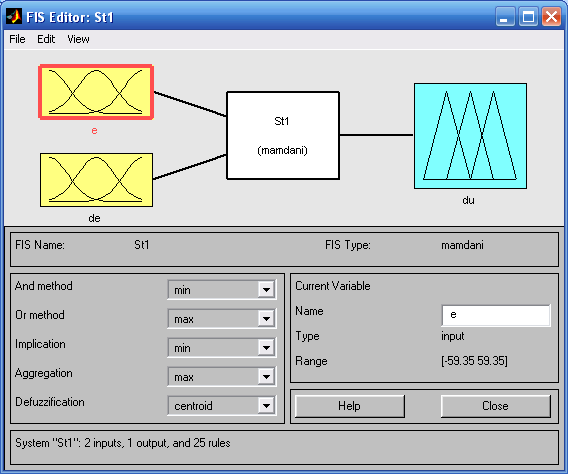
Рисунок 11 Структура нечеткого ркгулятора
Зададим ориентировочные значения (Range) для входных и выходных переменных. Данные значения определяются из модели САУ на линейном корректирующем устройстве (Рисунок 12-15).
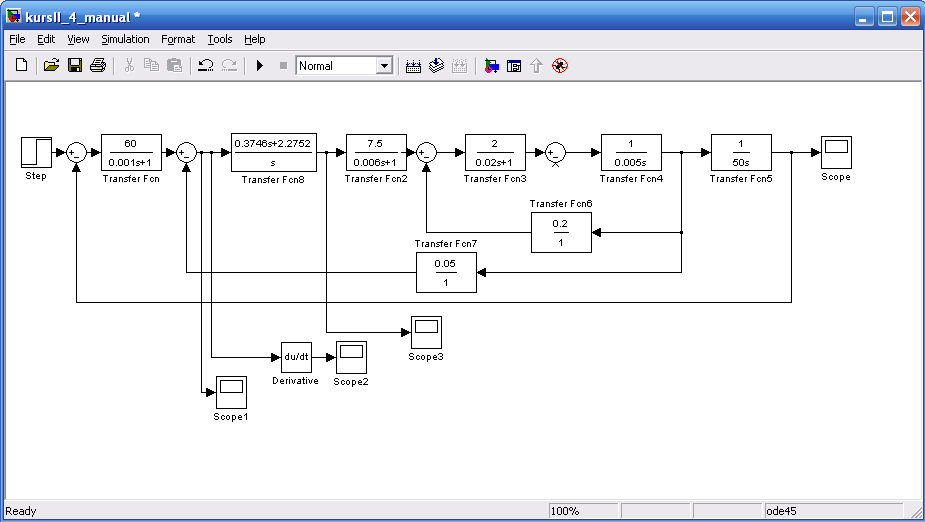
Рисунок 12. Получение ориентировочных диапазонов входных и выходных значений нечеткого регулятора
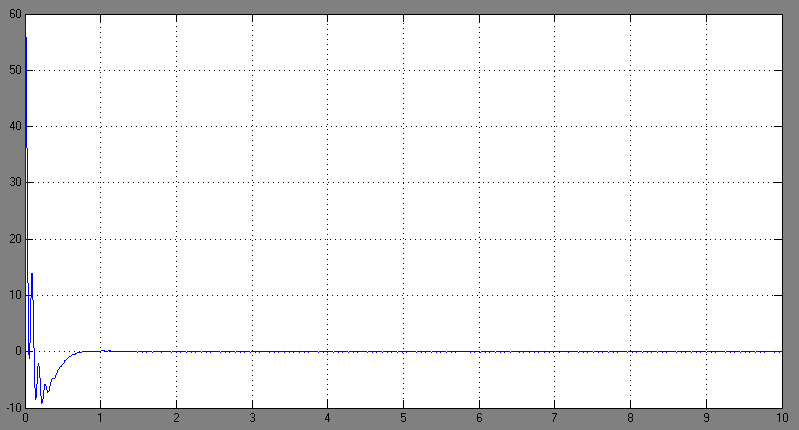
Рисунок 13 Диапазон значений ошибки управления (e: -10…+59.35)
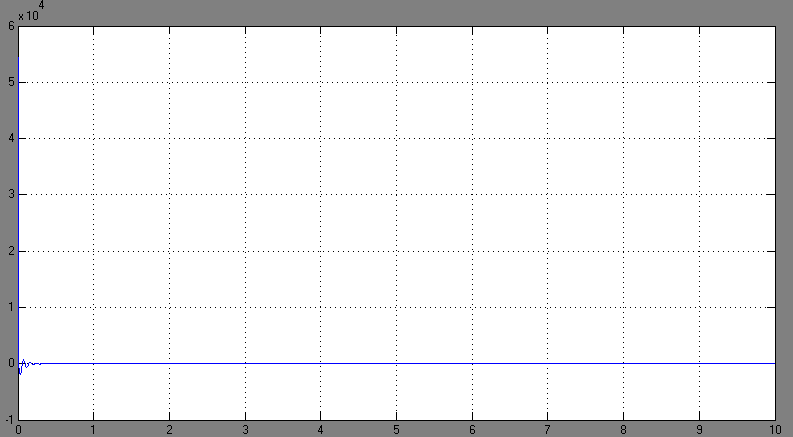
Рисунок 14. Диапазон значений производной по ошибке (сe: -1…+5.4356*104)
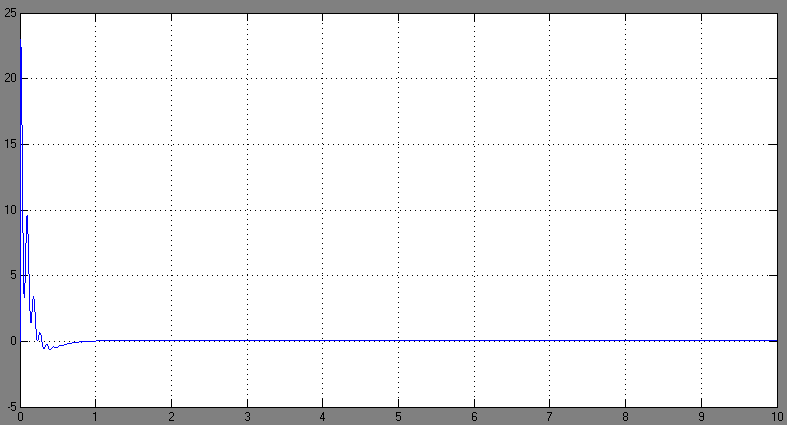
Рисунок 15. Диапазон значений производной по управлению(du: -1…+23)
Зададим лингвистические термы и базу правил для входных и выходных переменных (Рисунок 16-20)
Лингвистические термы:
Отрицательное_Большое: NB (--)
Отрицательное_Малое: NS (-)
Близкое_к_Нулю: Z (0)
Польжительное_Малое: PS (+)
Положительное_Большое: PB (++)
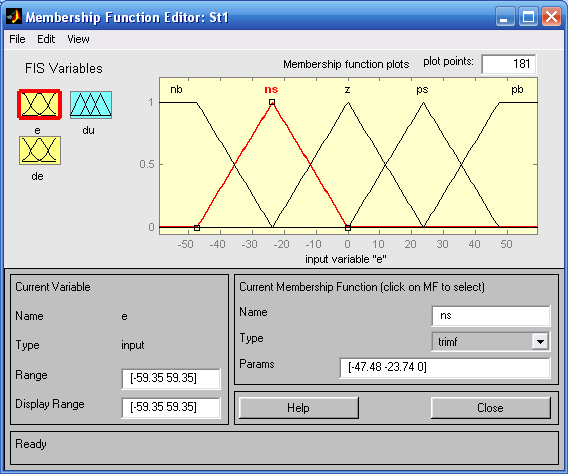
Рисунок 16. Лингвистические термы и диапазон значений ошибки управления (е)
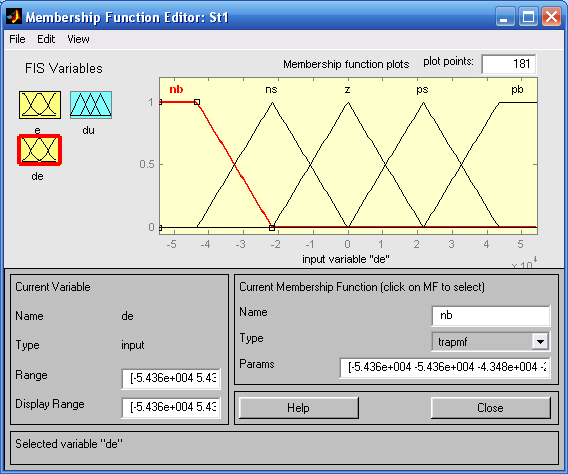
Рисунок 17. Лингвистические термы и диапазон значений производной по ошибке
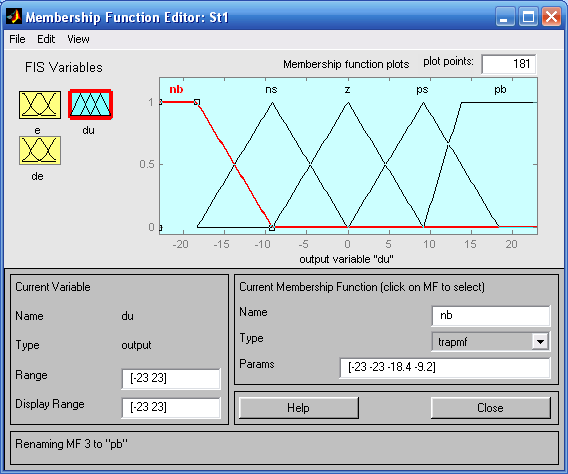
Рисунок 18. Лингвистические термы и диапазон значений производной по управлению
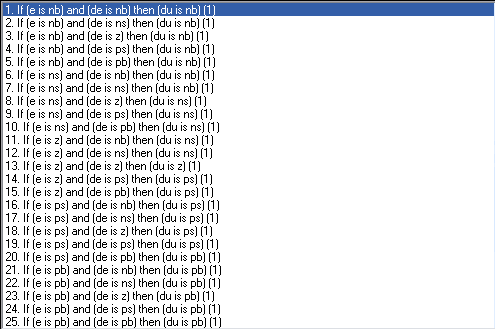
Рисунок 19. База правил
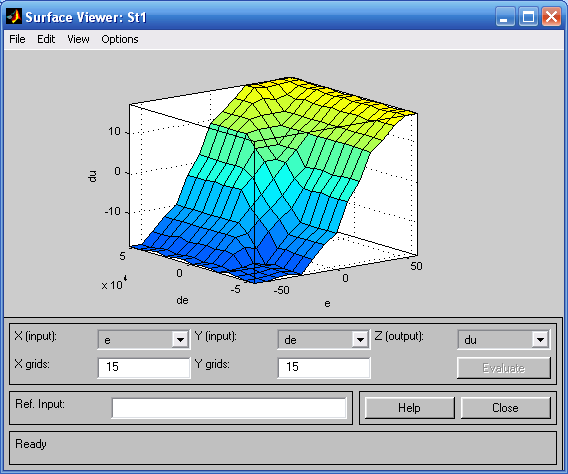
Рисунок 20. Графическая интерпретация базы правил
2.2 Синтезирование нечеткого регулятора
Синтезируем нечеткий регулятор вместо линейного корректирующего устройства на базовом режиме работы системы (Рисунок 21, 22):
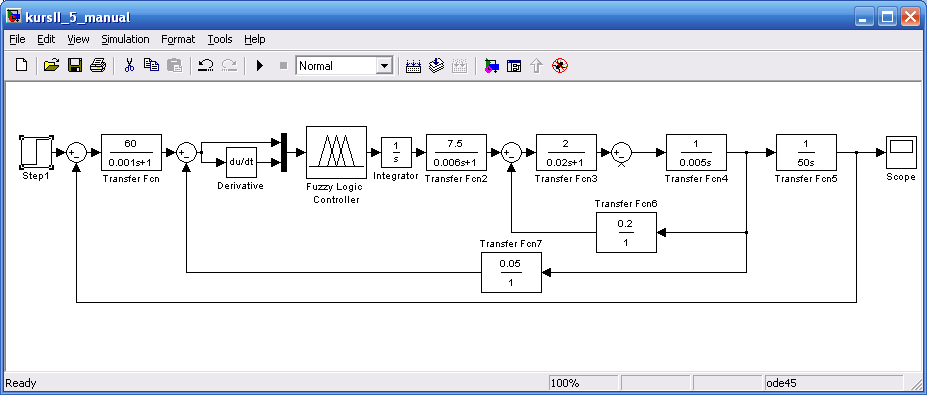
Рисунок 21. Построение системы на базе нечеткого регулятора
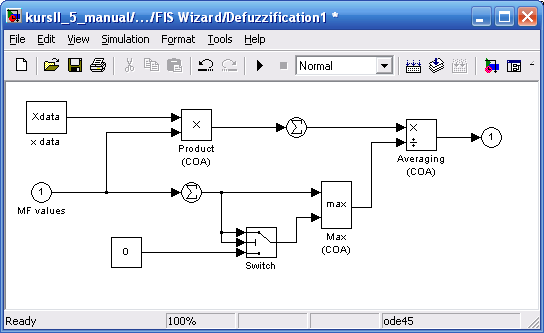
Рисунок 22. Defuzzification
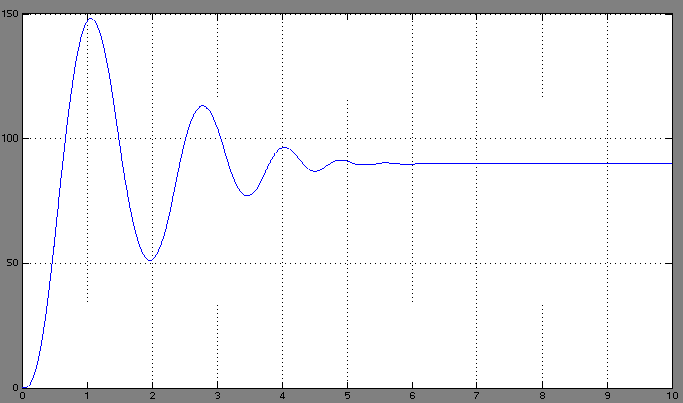
Рисунок 23. Переходной процесс системы
Как видно из Рисунок 23 переходной процесс системы на базе нечеткого регулятора устойчив, но не удовлетворяет заданным качественным характеристикам, следовательно, требуется дополнительная корректировка входных и выходных параметров нечеткого регулятора.
Подберем необходимые значения диапазонов изменения (Range) входных и выходных величин нечеткого регулятора. В итоге получится переходный процесс показанный на рисунке 24.
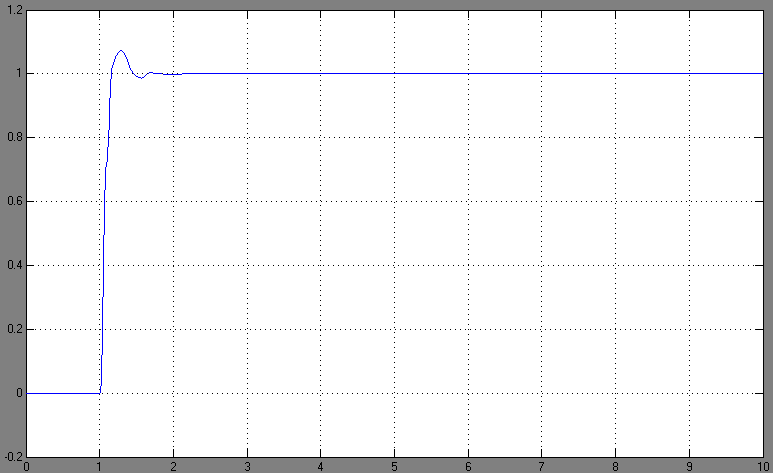
Рисунок 24. Переходной процесс системы
Из рисунка 24 видно, что переходной процесс соответствует заданным критерием качества:
Время нарастания: Tнараст=0.3
Время регулирования: Трег=0.7
Перерегулирование: рег=(95-90)/90=5.6%
3. Анализ качества управления системы прототипа и синтезированной нечеткой системы регулирования
Проведем сравнительную оценку качества управления системы прототипа и нечеткой системы регулирования путем изменения момента нагрузки Мн от 0 до 10 нм (рисунок 25, 26):
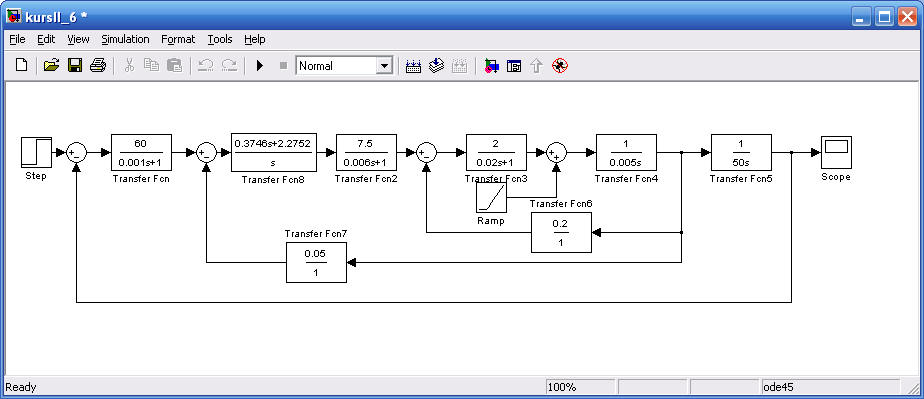
Рисунок 25. Структурная схема с линейным корректирующим устройством
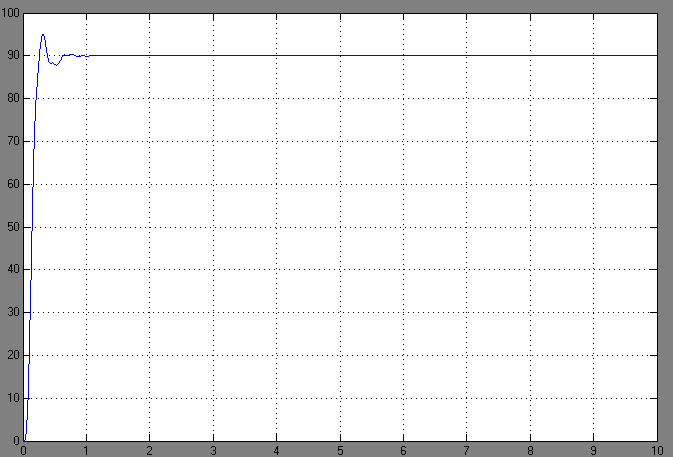
Рисунок 26. Реагирование системы прототипа на изменение момента нагрузки
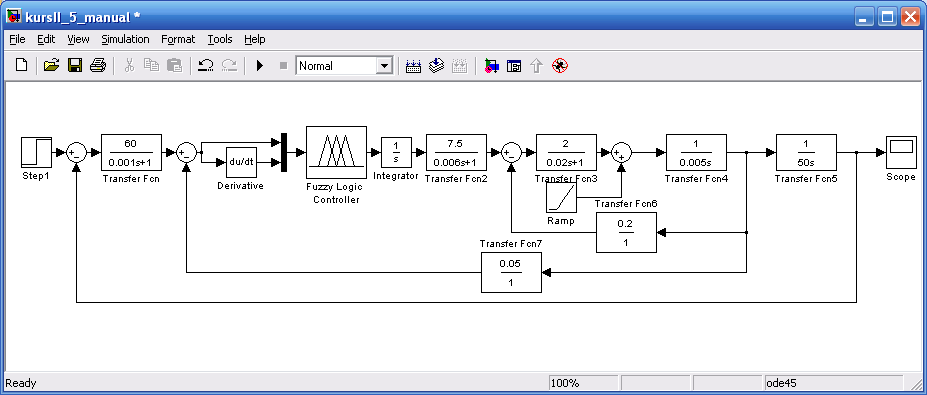
Рисунок 27. Структурная схема САУ на базе нечеткого регулятора
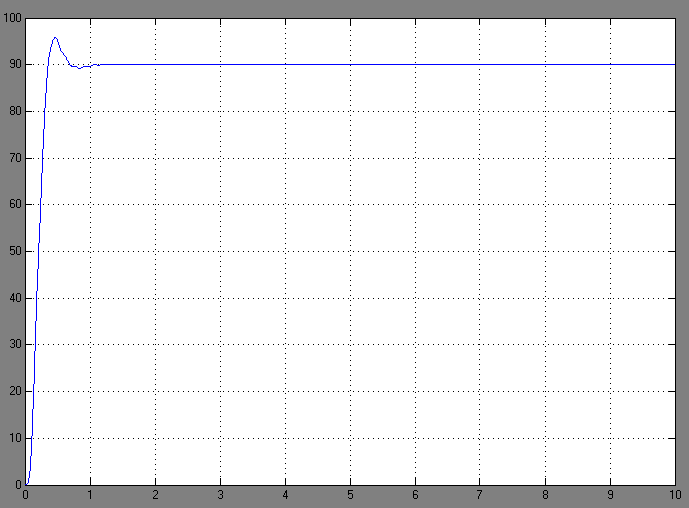
Рисунок 28. Реагирование системы с нечетким регулированием на изменение момента нагрузки
Исходя из показаний отображенных на рисунках 26 и 28, можно сделать вывод, что изменение момента нагрузки не влияет на качество переходного процесса не зависимо от типа корректирующего устройства. Т.е. применение нечеткой системы регулирования для контроля момента нагрузки не оправдано.
Для проведения сравнительной оценки качества управления системы прототипа и нечеткой системы регулирования увеличим коэффициент kу передаточной функции (рисунок 29):
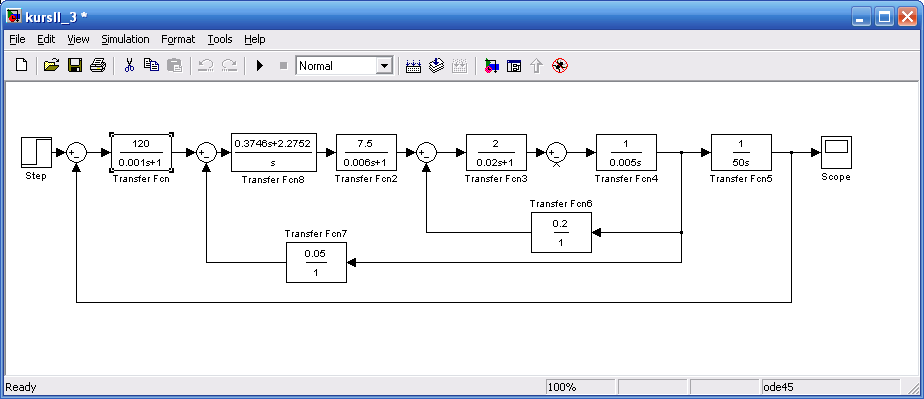
Рисунок 29. Структурная схема САУ прототипа с увеличенным kу
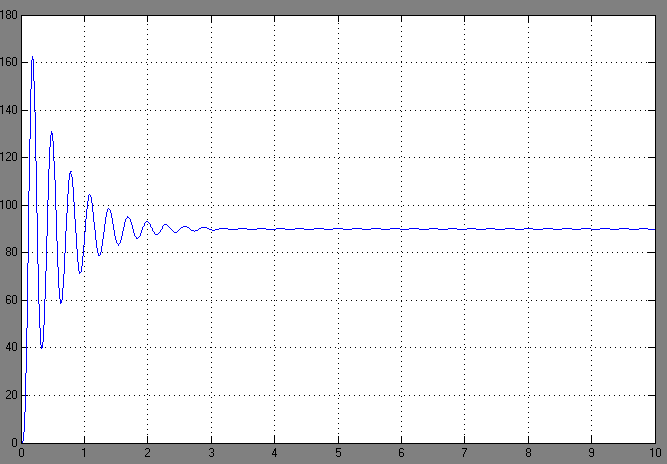
Рисунок 30. Реагирование системы прототипа на изменение коэффициента kу передаточной функции
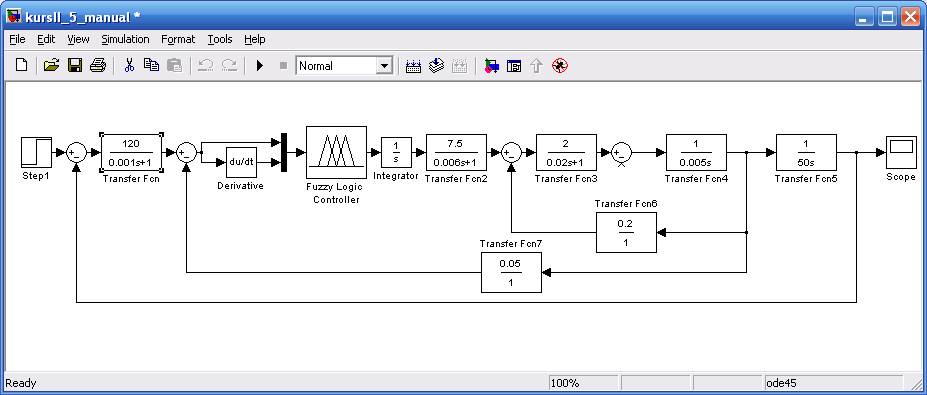
Рисунок 31. Структурная схема с нечётким регулированием при увеличении kу
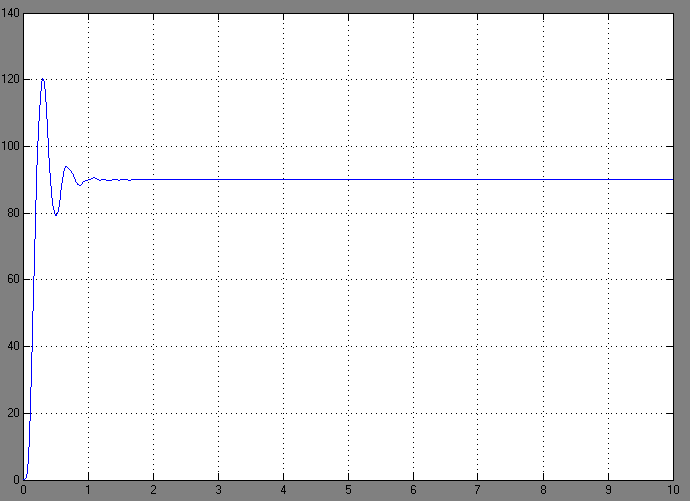
Рисунок 32. Реагирование нечеткой системы регулирования на изменение коэффициента kу передаточной функции
По полученным данным можно сделать вывод, что изменение передаточной функции преобразователя угол-напряжение влияет в меньшей степени на качество переходного процесса системы с нечетким регулятором по сравнению с системой прототипа.
Заключение
В результате проведенной работы была построена система с нечетким регулятором на основе блока Fuzzy Logic Controller. Данная система по сравнению с линейной системой обеспечивает выполнение требуемого качества переходного процесса при изменении различных параметров системы и возмущающих воздействиях. Также следует отметить что применение нечетких систем регулирования не всегда бывает оправданным. В некоторых случаях более рационально использовать простые линейные корректирующие устройства для контролирования процессов нежели дорогостоящие системы нечёткого регулирования.
Литература
1. Дьяконов В.П. MATLAB. Учебный курс. – СПб: Питер, 2000.
2. Потемкин В.Г. Введение MATLAB. – М.: Диалог-МИФИ, 2000. – 247 с.
18
Лист
Дата
Подпись
№ докум.
Лист
Изм.
19
Лист
Дата
Подпись
№ докум.
Лист
Изм.
20
Лист
Дата
Подпись
№ докум.
ист
Изм.
17
Лист
Дата
Подпись
№ докум.
Лист
Изм.
16
Лист
Дата
Подпись
№ докум.
Лист
Изм.
6
Лист
Дата
Подпись
№ докум.
Лист
Изм.
7
Лист
Дата
Подпись
№ докум.
Лист
Изм.
Лист
Дата
Подпись
№ докум.
Лист
Изм.
9
21
Лист
Дата
Подпись
№ докум.
Лист
Лист
Дата
Подпись
№ докум.
Лист
Изм.
8
11
Лист
Дата
Подпись
№ докум.
Лист
Изм.
10
Лист
Дата
Подпись
№ докум.
Лист
Изм.
15
Лист
Дата
Подпись
№ докум.
Лист
Изм.
14
Лист
Дата
Подпись
№ докум.
Лист
Изм.
13
Лист
Дата
Подпись
№ докум.
Лист
Изм.
12
Лист
Дата
Подпись
№ докум.
Лист
Изм.
Изм.
22
Лист
Дата
Подпись
№ докум.
Лист
Изм.
23
Лист
Дата
Подпись
№ докум.
Лист
Изм.
24
Лист
Дата
Подпись
№ докум.
Лист
Изм.
25
Лист
Дата
Подпись
№ докум.
Лист
Изм.
5
Лист
Дата
Подпись
№ докум.
Лист
Изм.
Система электромеханического привода манипулятора