Принципы управления объектами
PAGE \* MERGEFORMAT 17
Лекция №2
Принципы управления объектами
Общая структура проектируемой системы, её основные элементы и принцип управления в значительной мере определяются свойствами объекта регулирования, условиями работы системы и требованиями, предъявляемыми к её точности. САУ должна решать две основные задачи
- Обеспечить требуемое изменение регулируемых величин;
- Скомпенсировать действие на объект регулирования возмущений.
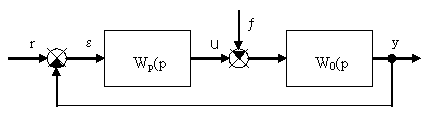
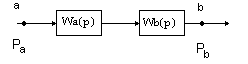
Преобразуем обобщённую структурную схему САУ к виду
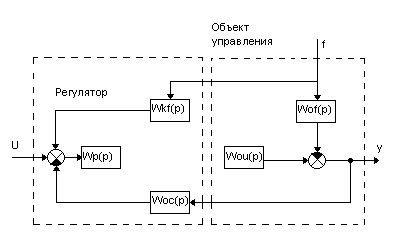
Структурная схема САУ
В общем случае управление регулирующим органом осуществляется в функции , y, x:
.
Это уравнение преобразуем по Лапласу при нулевых начальных условиях, полагая систему линейной:
(1)
Уравнение объекта регулирования с одной регулируемой функцией при воздействии на него возмущения имеет вид
(2)
Подставив (1) в (2), получим закон функционирования системы:
или
Отсюда
=Wзх(p)X(p)+Wзf(p)F(p) , (3)
где Wзх(p) – передаточная функция системы по каналу управления,
Wзf(p) - передаточная функция системы по каналу возмущения.
Для того чтобы регулируемая функция y изменялась по закону x(t) при любых внешних возмущениях, необходимо, чтобы Wзf(p) 0 , а Wзx(p) 1 (если неединичная обратная связь, то Wзx(p) 1/Kос) при всех условиях работы системы, т.е. необходимо с помощью сил, создаваемых регулирующим органом, скомпенсировать влияние возмущающих воздействий, действующих на объект регулирования, и приложить к объекту такие силы, которые бы обеспечили требуемое изменение регулируемой величины у(t).
Из (3) видно, что эти задачи могут быть решены различными способами, так как при этом необходимо выполнить два условия, а в законе управления (1) имеется три варьируемых оператора Wp(p), Wkf(p), Wос(p). Один из операторов может быть произвольным.
- Принцип разомкнутого управления (принцип прямой связи).
Если известны действующие на систему возмущения и известна желаемая реакция на выходе системы, то можно определить передаточную функцию регулятора.
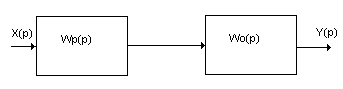
.
Сущность принципа состоит в том, что алгоритм управления строится только на основе заданного алгоритма функционирования и не контролируется по фактическому значению управляемой координаты объекта.
Достоинства:
- Высокая скорость реакции на внешние воздействия;
- Система не может быть в принципе неустойчивой.
Недостатки:
- Чувствительность к изменению параметров элементов;
- Невозможно получить высокую точность при неизвестных возмущениях и низкой точности модели объекта;
- Невозможность полной компенсации возмущений для объектов с транспортной задержкой;
- Проблема физической реализуемости обратных операторов.
Примеры: пневмо - и гидроэлектроклапаны, которые по получении электрического сигнала открывают или закрывают проход топлива, воздуха или парогаза к агрегатам, автоматические станочные линии, торговые автоматы, информационные табло железнодорожных и аэровокзалов и др.
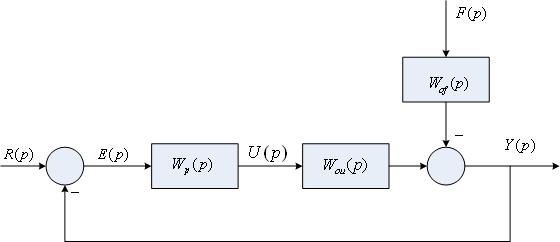
- Принцип обратной связи (принцип управления по отклонению контролируемой функции от входного воздействия, принцип Ползунова-Уатта)
Сущность принципа обратной связи заключается в том, что регулятор вступает в работу только тогда, когда между текущим и заданным значениями регулируемой функции появляется рассогласование, и регулятор воздействует на объект таким образом, чтобы свести это рассогласование к нулю или к малой величине.
Принцип внутренне противоречив, ибо прежде чем ликвидировать ошибку необходимо допустить ее возникновение.
Без обратной связи невозможно учесть влияние неизвестных факторов, неполноту знаний об объекте.
В рассматриваемом случае уравнение системы регулирования будет иметь вид
Если Wp(p) по модулю во всех режимах работы системы сделать достаточно большим [в идеале |Wp(j)|], то уr, так как при этом условии Wзf(p) будет стремиться к нулю, а Wзr(p) - к единице. Следовательно, регулирование по отклонению позволяет одновременно уменьшить влияние на систему возмущающих воздействий f и увеличить точность воспроизведения заданного входного воздействия r.
|
Регулятор вырабатывает в системе изменение y(t), направленное навстречу начальному отклонению, вызвавшему работу регулятора, то есть стремится компенсировать возникшее отклонение. |
Обратные связи в регуляторе или объекте называются местными обратными связями.
Если система линейная и звенья статические, то в установившемся режиме тогда где обозначим k=kpky – общий передаточный коэффициент разомкнутой цепи регулирования.
Уравнение статического равновесия имеет вид
При увеличении k влияние уменьшается, поэтому достоинством этого принципа регулирования является его универсальность по отношению к возмущениям, а недостатком – склонность системы к неустойчивому режиму работы.
Установившаяся ошибка регулирования в статической системе с единичной отрицательной обратной связью (статическая ошибка) если k>>1, то
Достоинства:
- Регулирование по отклонению позволяет уменьшить влияние на систему всех возмущающих воздействий;
- Увеличивается точность воспроизведения заданного входного воздействия;
- На динамические свойства объекта никаких ограничений не накладывается. Следовательно, регулирование по отклонению применимо к любым объектам, в том числе и к неустойчивым;
- Отсутствие необходимости замера возмущений, что очень важно с практической точки зрения;
- Отсутствие жёстких требований к стабильности характеристик элементов регулятора и объекта.
Недостатки:
- Принципиально нельзя получить регулирование без ошибки, так как ошибка
регулирования является сигналом, который управляет регулирующим органом;
- Склонность системы к неустойчивому режиму работы;
- Замедленная реакция системы на изменения возмущающего воздействия, так как управляющее воздействие на объект формируется по изменению выходной координаты;
- Уменьшается коэффициент усиления замкнутой системы относительно коэффициента усиления разомкнутой системы.
Управление – фундаментальная философская категория, решающая задачу формирования управляющих воздействий.
Регулирование – производная философская категория, решающая задачу отработки заданных воздействий.
Системы автоматического регулирования (САР) отличаются от систем автоматического управления (САУ) тем, что в последних происходит как формирование (выработка) желаемого поведения объекта на основании цели управления в виде задающих (управляющих) воздействий, так и их отработка в САР происходит лишь их отработка, а сами управляющие воздействия, поступающие на элемент сравнения, считаются заданными.
Теория автоматического регулирования является основой построения первого уровня, а теория автоматического управления – основой всей иерархической структуры информационных процессов управления, необходимых для комплексной автоматизации сложных объектов.
Принцип действия любой САР состоит в том, чтобы обнаружить отклонения регулируемых величин, характеризующих работу машины, или протекание процесса от требуемого режима, и при этом воздействовать на машину или процесс так, чтобы устранить возникшие отклонения.
В теории автоматического регулирования основными являются проблемы устойчивости, управляемости, наблюдаемости, качества переходных процессов, динамической точности, автоколебаний, оптимизации, синтеза и идентификации.
Пример 3. Определить уравнение статики системы регулирования напряжения генератора постоянного тока.
где k=kгkу, kг=F(Uг) определяется при Iн=0.
Выходная статическая характеристика САР.
- Принцип управления по возмущению (принцип компенсации, принцип Понселе).
Сущность принципа Понселе заключается в том, что возмущение измеряется и формируется управляющее воздействие по каналу возмущения на объект так, чтобы скомпенсировать влияние возмущения на регулируемую координату.
Регулирующий орган управляется только в функции внешних воздействий F(р) и R(р). Фактическое изменение регулируемой функции у на работу регулятора влиять не будет, т.е. управление осуществляется по разомкнутому циклу.
Y(p)=Yr(p)+Yf(p)=Wp(p)Wor(p)R(p)+[Wkf(p)Wp(p)Wor(p)-Wof(p)]F(p);
при выполнении условия Wp(p)Wor(p)=1 и Wkf(p)Wp(p)Wor(p) -Wof(p)=0 ,
Y(p)=R(p).
Структура автоматической системы принципиально позволяет получить управление без ошибок. Однако практическая реализация такой системы наталкивается на затруднения.
Достоинства:
- Возможна полная компенсация действия возмущения.
- Компенсирующее устройство не влияет на устойчивость.
- Простота регулятора.
Недостатки:
- Необходимо сравнительно точно измерять возмущающие воздействия, что не всегда может быть выполнено, так как возмущающие силы обычно не поддаются точному измерению.
- Реализация регулятора в общем случае невозможна, так как в передаточной функции Wp(p)=1/Wor(p) порядок числителя, как правило, выше порядка знаменателя.
- Регулирование по возмущению может быть использовано лишь для объектов устойчивых.
- Компенсируется только измеренное возмущение.
- Приборы для измерения возмущений сложные и дорогие.
Такие системы применяются в тех случаях, когда не требуется высокая точность выполнения алгоритма функционирования объекта.
Пример. Проведем анализ установившегося режима работы генератора постоянного тока с компенсирующей обмоткой ОВ2.
При условии компенсируется влияние Iн.
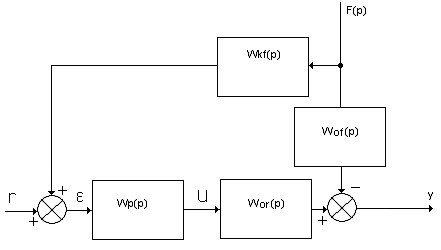
4. Комбинированный принцип управления.

Если , ,то Y(p)=R(p).
Здесь одновременно используются как принцип регулирования по отклонению, так и по возмущению.
Такая структура обеспечивает наибольшие возможности в отношении получения заданной точности регулирования. Так как регулирование производится по отклонению, то возможно регулирование объектов с любыми динамическими свойствами, а наличие дополнительных связей по возмущению и входному воздействию позволяет добиться высокой точности регулирования без существенного усложнения замкнутого контура регулирования.
Если Wkr(p), Wp(p) и Wkf(p) выбрать так, чтобы Wз(p)=0, а Wзr(p)=1, то =0 во всех режимах работы, т.е. комбинированная система в основном будет работать, как система регулирования по возмущению, а на долю связи по отклонению останется лишь компенсация всех неучтённых возмущений, приводящих к изменению регулируемой величины. Так как эти возмущения имеют обычно 2-й порядок малости, то высоких требований к регулятору Wp(p) можно не предъявлять. Однако на практике введение связи по возмущению используется редко, так как возмущение трудно измерить, а в некоторых системах влияние возмущения бывает мало и его не учитывают (например, в большинстве следящих приводов, особенно быстродействующих). В системах стабилизации (r(t)=const) применение дополнительных связей от входного воздействия обычно не используют.
Достоинства:
- Наличие ООС делает систему менее чувствительной к изменению параметров регулируемого объекта;
- Добавление канала, чувствительного к заданию или к возмущению, не влияет на устойчивость контура с ООС.
Недостатки:
- Каналы, чувствительные к заданию или к возмущению, обычно содержат дифференцирующие звенья. Их практическая реализация затруднена.
- Не все объекты допускают форсирование.
Статические и астатические САУ.
.
Теорема о предельном (конечном) значении функции.
|
Пусть непрерывная функция h(t) имеет предел, тогда справедливо равенство: . |
Если - ошибка системы, а yэm(t) – эталонная (безошибочная) выходная функция, то статическая ошибка системы
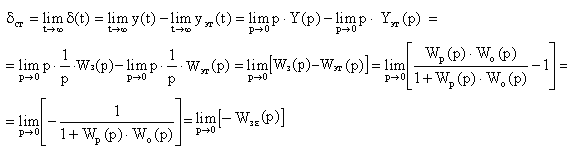 .
.
Передаточная функция по отклонению
Система регулирования называется статической по отношению к управляющему воздействию, если при воздействии стремящемся к установившемуся постоянному значению, ошибка регулируемой функции также стремится к постоянному значению, зависящему от величины воздействия.
Критерием того, что система статическая, является выражение
, где Wз(p) – передаточная функция замкнутой системы по отклонению.
Автоматическая система называется астатической по отношению к управляющему воздействию, если при воздействии стремящемся к некоторому установившемуся постоянному значению отклонение регулируемой функции стремится к нулю вне зависимости от величины воздействия.
Одна и та же система может быть статической по отношению к возмущающему воздействию и астатической по отношению к управляющему воздействию.
Признаком астатической системы по каналу управления является наличие нулевых полюсов в передаточной функции прямого канала системы; признаком астатической системы по каналу возмущения является наличие нулевых полюсов передаточной функции регулятора.
Астатические системы могут быть I–го и более высокого порядков. На практике находят применение астатические системы 1-3 порядков.
В передаточной функции разомкнутой системы с астатизмом I–го порядка по каналу управления имеется 1 нулевой полюс .
В системе регулирования с астатизмом второго порядка
то есть имеется два нулевых полюса в передаточной функции разомкнутой системы:
Наличие двух нулевых полюсов приводит к тому, что система становится структурно-неустойчивой, и для её стабилизации обязательно применение корректирующих устройств. Вместе с тем ясно, что скоростная ошибка такой системы равна нулю.
Порядок астатизма автоматической системы при введении корректирующих устройств может измениться, например статическая система может приобрести свойства астатической и наоборот.
Поэтому при проектировании автоматических систем выбор статической или астатической системы определяется конструктивными особенностями системы, свойствами объекта регулирования и его регулирующего органа, возможностями проектируемой системы и требованиями, предъявляемыми к ней.
Статизм регулирования - статическая ошибка от действия номинального возмущения, выраженная в % относительно значения выходной функции при отсутствии возмущения либо номинальном возмущении или относительно ном.
Рис. 1.
К статическим регуляторам принято относить такие, у которых от действия ступенчатого сигнала на входе выходной сигнал асимптотически устанавливается на уровне некоторой конечной величины.
У астатических регуляторов от действия ступенчатого сигнала на входе происходит линейное или нелинейное нарастание сигнала на выходе без ограничения по уровню.
Статические характеристики звеньев и объектов САУ
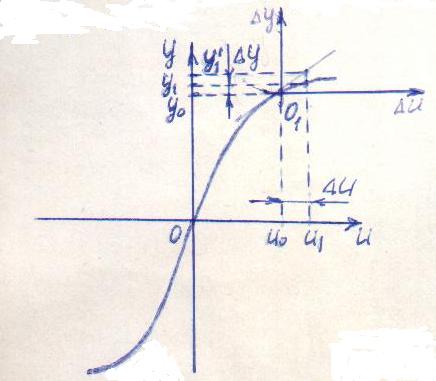
Статическая характеристика объекта
Статической характеристикой по каналу управления (возмущения) объекта называется функциональная зависимость выход-вход при отсутствии или постоянном значении возмущения (управления), все точки которой сняты в установившемся режиме (при t).
Пусть О1 – рабочая точка объекта, тогда статический передаточный коэффициент объекта определяют по выражению:
.
Для характеристики динамических свойств в окрестности рабочей точки О1 определяется приращение , соответствующее приращению u входного воздействия. Чтобы упростить динамическую модель объекта производят линеаризацию характеристики. Достаточным условием возможности проведения линеаризации математической модели звена или системы является отсутствие разрывности и неоднозначности функций. Линеаризация нелинейной аналитической функции основана на том, что непрерывная и имеющая все производные в окрестности некоторой (рабочей) точки функция (например, статическая характеристика звена) может быть разложена в ряд Тейлора по степеням малых отклонений аргумента относительно рабочей точки:
.
Если при этом отклонения аргумента достаточно малы, то можно ограничиться первыми линейными членами разложения и рассматривать вместо нелинейной функции линейную, откуда
,
где - динамический передаточный коэффициент.
Линеаризацию нелинейных статических характеристик производят методами малых отклонений, касательной, секущей, кусочно – линейной аппроксимации.
У объектов регулирования определяют статические характеристики по каналам управления и возмущения:
Возмущение обычно Внешние характеристики объекта
действует со знаком “-”
Пример
Линеаризация алгебраических уравнений
Резервуар с жидкостью
Бак с водой приведен на рис. 1. В нижней части бака просверлено отверстие, через которое вытекает вода. Площадь сечения бака обозначим через S, а площадь сечения отверстия – через .
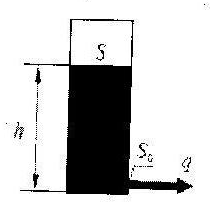
Рис. 1. Резервуар с жидкостью
Построим модель, которая связывает уровень воды в баке (в метрах) и расход вытекающей воды (в м3/c). Эту связь можно найти с помощью закона Бернулли, который в данном случае принимает вид
,
где - плотность жидкости (в кг/м3), м/с2 – ускорение свободного падения, - скорость вытекания жидкости (в м/с). Отсюда получаем . Учитывая, что расход воды вычисляется как , находим
, (1)
где - постоянная величина. Это статическая нелинейная модель. Статическая модель описывает установившееся состояние (статический режим), когда в баке поддерживается постоянный уровень воды и поток вытекающей воды тоже постоянный.
Линеаризовать модель – значит приближённо заменить нелинейное уравнение линейным:
,
где - некоторый коэффициент.
Предположим, что уровень воды изменяется в интервале от 0 до 1м. Тогда один из вариантов – вычислить коэффициент как угол наклона отрезка, соединяющего точки кривой на концах этого интервала. Для определённости принимаем , тогда получаем (рис.2). Эта модель очень грубая и даёт большую ошибку, особенно для уровней в диапазоне от 0,1 до 0,6. Чтобы уменьшить ошибку, можно попробовать несколько изменить (например, увеличив его до 1,2), однако точность приближения по-прежнему будет невысока, хотя и несколько лучше, чем в первом случае.
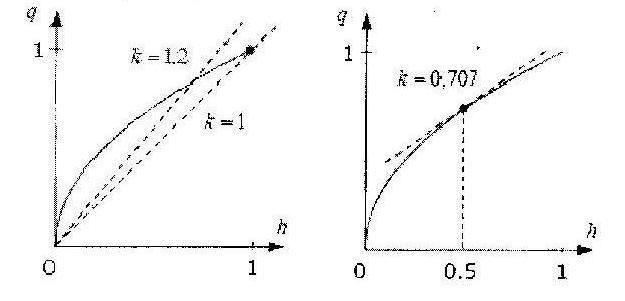
Рис. 2. Статические характеристики объекта
Теперь предположим, что обычно уровень мало изменяется вблизи среднего значения . В этом случае можно применить другой подход. В этой области кривая почти совпадает с касательной в точке (0,5;), угол наклона которой равен производной
.
Касательная – это прямая с наклоном , проходящая через точку (0,5;), её уравнение имеет вид . Свободный член определим из равенства
,
так что получаем модель
. (2)
Это линейное уравнение, однако модель (2) – нелинейная, поскольку для неё не выполняется, например, свойство умножения на константу. Это легко проверить, сравнив и :
.
Принцип суперпозиции также не выполняется.
Для того чтобы получить из (2) линейную модель, нужно записать уравнение в отклонениях от рабочей точки , в которой определили наклон касательной. Тогда
. (3)
Поскольку график зависимости (2) проходит через точку , можно применить равенство
.
Тогда из (3) находим
. (4)
Полученное таким образом уравнение – это линейная модель объекта, записанная в отклонениях входа и выхода от номинальной (рабочей) точки . Приближённая модель (4) точнее всего соответствует объекту вблизи этой точки, а при больших отклонениях от неё ошибка значительно возрастает.
Динамические характеристики:
- Переходная характеристика;
- Импульсная переходная характеристика;
- Реакция объектов и систем на типовые и требуемые по технологии работы воздействия.
Типовые входные воздействия
- Ступенчатое (скачкообразное) воздействие.
если U0=1 [размерность входного воздействия], то u(t)=1(t) – единичное ступенчатое воздействие.
Функция Хевисайда (в Matlab – heaviside(t))
.
- Линейно-возрастающее (с постоянной скоростью) воздействие.
где u(t) – линейная функция времени.
Для систем управления движением в качестве тестового сигнала обычно используют не функцию скачка, а линейно нарастающий сигнал, поскольку электромеханические системы имеют ограниченную скорость нарастания выходной функции.
- Параболическое (с постоянным ускорением) воздействие.
где
- Синусоидальное воздействие.
- Воздействия в виде степенных функций времени.
изображение по Лапласу степенных функций времени имеет вид
При исследовании точности работы станков с программным управлением в установившихся режимах широко используются управляющие воздействия в виде степенных функций времени.
В нормальных режимах работы управляющее воздействие в виде линейной функции времени u(t)=At1(t) имеет место в следящих системах станков с программным управлением при обработке изделия с постоянной скоростью по одной или двум координатам. Управляющее воздействие в виде квадратичной степенной функции может быть, например, при обработке изделия с постоянным ускорением по одной из координат.
В ряде случаев более сложные воздействия на систему можно представить в виде суммы S степенных функций времени
6. Дельта-функция (единичная импульсная функция, функция Дирака (в Matlab – dirac(t))).
Рассмотрим функцию
Если эту функцию трактовать как силу, действующую за промежуток времени от 0 до h, а в остальное время равную нулю, то, очевидно, импульс этой силы будет равен единице. Изображение этой функции будет т.е.
В механике и электротехнике удобно рассматривать силы, действующие очень короткий промежуток времени, как силы действующие мгновенно, но имеющие конечный импульс. Поэтому вводят функцию (t) как предел функции 1(t,h) при
Следует иметь в виду, что (t) не есть функция в обычном понимании. Многие авторы-физики функцию (t) называют функцией Дирака.
Эту функцию называют также единичной импульсной функцией или дельта-функцией. Естественно положить
L – изображение функции (t) определим как предел изображения функции 1(t,h) при (здесь воспользовались правилом Лопиталя для нахождения предела).
Частотные характеристики
Частотными называются характеристики звеньев (систем) в форме графиков или таблиц, отображающие изменение амплитуды и фазы выходной функции (т.е. реакцию) звеньев или систем относительно синусоидального входного воздействия в установившемся режиме при изменении частоты от 0 до .
Частотная область даёт возможность наглядно оценить динамические свойства системы:
Резонансные;
Свойства в установившемся режиме;
Полосу пропускания;
Усилительные свойства в различных областях частот.
Для линейных систем справедлив ПРИНЦИП СУПЕРПОЗИЦИИ, который можно сформулировать следующим образом.
|
Реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. |
Это позволяет ограничиться изучением систем только с одним входом.
В качестве входных воздействий были выбраны гармонические воздействия в виду нескольких обстоятельств
- реально встречающиеся воздействия, как правило, могут быть представлены в виде суммы гармоник различных частот (разложение Фурье)
- в установившихся режимах гармонические сигналы передаются линейными элементами и системами без искажений
- обычно не возникает затруднений в экспериментальном исследовании поведения систем .
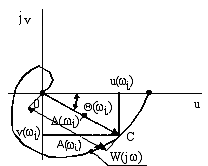
Функцию называют частотной передаточной функцией (график – амплитудно – фазовой характеристикой – АФХ).
Функцию W( j) можно представить в виде
где амплитудно-частотная функция (график АЧХ); - фазо-частотная функция (график ФЧХ),
U() – вещественная частотная функция (график – ВЧХ),
V() – мнимая частотная функция (график – МЧХ).
Если то
АФХ несёт информацию о реакциях на гармонические входные сигналы.
На комплексной плоскости частотную передаточную функцию W(j) определяет вектор , длина которого равна А(), а аргумент (угол, образованный этим вектором с действительной положительной полуосью) - (). Кривую, которую описывает конец этого вектора при изменении частоты от 0 до (иногда от - до ), называют амплитудно-фазовой частотной характеристикой (АФХ).
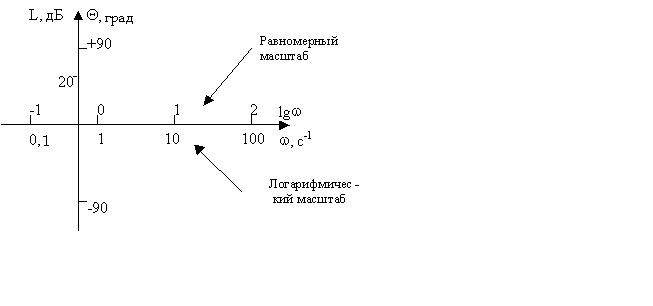
L ()= 20 lg A()= 20 lgW( j)- логарифмическая амплитудная частотная функция (график - ЛАЧХ).
ЛФЧХ называют график зависимости фазового сдвига функции () от логарифма частоты lg.
Единицей измерения L() является децибел, а единицей логарифма частоты в ЛЧХ – декада. Декадой называют интервал, на котором частота изменяется в 10 раз. Ось ординат при построении ЛЧХ проводят через произвольную точку оси абсцисс, а не через точку =0. Частоте =0 соответствует бесконечно удалённая точка lg- при 0.
Белл - логарифмическая единица десятикратного увеличения мощности. Так как А()- отношение напряжений, токов, перемещений, то увеличение этого отношения в 10 раз будет соответствовать увеличению отношения мощностей в 100 раз, что соответствует 2 Белам или 20 дБ.
1мВт – базовая мощность в устройствах связи.
Методика построения логарифмических частотных характеристик САУ
Пусть передаточная функция разомкнутой статической САУ, состоящей из минимально-фазовых звеньев 1-го порядка, имеет вид в реальных системах n(m-n).
Отобразим W(р) в область преобразований Фурье преобразуем математическое описание каждого элементарного звена к форме и расположим в порядке убывания величины Тi:
Тогда
Алгоритм построения ЛАЧХ
- На оси нанесите точки i=1/Ti. Проведите через эти точки вертикальные штриховые линии.
- Проведите контурную линию с ординатой 20lgk слева до первой вертикальной линии при отсутствии нулевых полюсов и нулей в передаточной функции или линию с наклоном -20дБ/дек через точку при одном нулевом полюсе, или линию с наклоном -40 дБ/дек через точку при двух нулевых полюсах, или линию с наклоном +20 дБ/дек через точку при одном корне числителя, равном нулю, или линию с наклоном +40 дБ/дек через точку при двух нулях, равных нулю, и т.д.
- До следующей вертикальной линии проведите контурную линию с наклоном -20* дБ/дек ( – количество элементарных звеньев с одинаковыми Ti), если звенья апериодические, или +20* дБ/дек для дифференцирующих звеньев первого порядка.
- Уменьшите (увеличьте) наклон на -20* дБ/дек (+20* дБ/дек) на следующей вертикальной линии до полного построения L().
Высокочастотные асимптоты ЛАЧХ (справа от наибольшей сопрягающей частоты) проводят в требуемом диапазоне частот.
Примечания
- Для построения ЛАЧХ звена второго порядка используются приведенные характеристики в технической литературе или строятся по точкам вблизи i=1/Ti, вдали с асимптотами левой 0 дБ/дек , правой -40 дБ/дек для колебательного звена и +40 дБ/дек для звена дифференцирующего второго порядка.
- Правило построения ЛЧХ систем с неминимально-фазовыми звеньями остаётся тем же.
- ЛФЧХ строятся по точкам, рассчитанным аналитически.
Пример
Пусть задана передаточная функция объекта
.
Требуется построить асимптотическую ЛАЧХ объекта.
1. Выделение элементарных звеньев.
Вынесем множитель из каждой скобки так, чтобы свободный член в этой скобке был равен 1:
.
Корни квадратного трёхчлена в знаменателе комплексно-сопряжённые, поэтому можно представить заданную передаточную функцию в виде произведения передаточного коэффициента и четырёх передаточных функций элементарных звеньев:
,
,
где .
Звенья с передаточными функциями и - идеальные звенья с введением производной, второе из них – неминимально - фазовое. Звено с передаточной функцией - апериодическое звено, а звено с - колебательное, поскольку .
2. Определение сопрягающих частот.
Сопрягающие частоты – это точки излома ЛАЧХ. Они определяются как . Таким образом,
рад/с, рад/с,
рад/с, рад/с.
Поскольку при построении ЛАЧХ на оси абсцисс откладывается lg, вычислим десятичные логарифмы этих частот:
, ,
, .
3. Построение ЛАЧХ.
Отметим найденные точки излома ЛАЧХ на оси абсцисс:
Поскольку интегрирующие и дифференцирующие звенья в системе отсутствуют, на низких частотах (примерно до первой сопрягающей частоты ) система имеет постоянное усиление, равное k=10. Учитывая, что амплитудная характеристика откладывается в логарифмическом масштабе (в децибеллах) получаем
20lgk=20lg10=20
и можно сразу нарисовать начальный участок ЛАЧХ:
На частоте вступает в действие апериодическое звено, которое даёт наклон -20 дБ/дек, в интервале от до график спускается вниз на
дБ, поэтому ордината для частоты равна дБ:
На частоте идеальное звено с введением производной добавляет наклон +20 дБ/дек, таким образом, общий наклон становится равен нулю:
На частоте неминимально – фазовое идеальное звено с введением производной ещё добавляет наклон +20 дБ/дек, таким образом, общий наклон становится равен +20 дБ/дек. В интервале от до график поднимается на дБ, поэтому ордината для частоты равна 9,6+10,420 дБ:
Наконец, на частоте колебательное звено добавляет наклон -40 дБ/дек, таким образом, общий наклон становится равен -20 дБ/дек:
ЛЧХ контура с отрицательной обратной связью
1. Аналитический метод построения ЛЧХ контура с единичной ООС.
отсюда
2. Построение ЛЧХ контура по номограммам замыкания (Никольса).
Пусть амплитудно-фазовая частотная функция замкнутой системы имеет вид
(1) причем ,
Амплитудную и фазовую частотные функции замкнутой системы Аз() и з() можно выразить через А() и разомкнутой цепи.
Согласно формуле (1) имеем
или, взяв обратные величины слева и справа, получим новое равенство
Подставим сюда и приравняем затем отдельно вещественные и мнимые части. Получим два равенства
Сложив сначала квадраты этих выражений, а затем поделив одно из них на другое, получим искомый результат
L(1)
L3(1)
3(1)
0
Чтобы не иметь дело на практике с этими формулами, составлены НОМОГРАММЫ ЗАМЫКАНИЯ.
Отложив на осях абсцисс и ординат заданные значения (1) и L(1), находим значения 20lgАз(1) и (1) на поле номограммы в точке с этими координатами. Таким образом по точкам строится вся частотная характеристика замкнутой системы.
Если контур с неединичной ООС, то его следует преобразовать к контуру с единичной ООС.
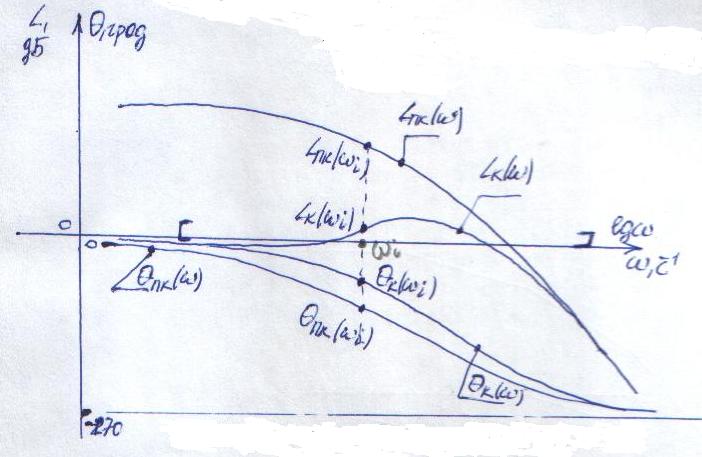
где WА(j)=WПК(j)WОС(j). Тогда ЛЧХ замкнутой системы строится в два приёма
вначале строятся ЛЧХ контура с единичной ООС, затем строятся ЛЧХ функции и, наконец, результирующие ЛЧХ системы и
Алгоритм построения ЛЧХ
- Строится ЛЧХ разомкнутой системы по передаточной функции .
- В выделенном диапазоне частот […] задаются рядом контрольных точек , которым соответствуют и .
- По номограмме замыкания определяются и соответствующие и .
- Соединив плавной кривой полученные точки в логарифмической системе координат, строят и .
3. Построение ЛЧХ по преобразованной передаточной функции контура.
Многочлены числителя и знаменателя передаточной функции замкнутого контура или прямых параллельных звеньев преобразовываются к произведению двух - или трёхчленов, затем по методике 1 строятся ЛЧХ.
4. Построение в Matlab.
Принципы управления объектами