Синтез систем автоматического управления
Лекция №6 Синтез систем автоматического управления
СИНТЕЗ САУ – выбор структуры и параметров САУ, начальных условий и входных воздействий в соответствии с требуемыми показателями качества и условиями функционирования.
Проектирование САУ предполагает выполнение следующих этапов:
- Исследование объекта регулирования: составление математической модели, определение параметров, характеристик и условий работы объекта.
- Формулирование требований к САР.
- Выбор принципа управления; определение функциональной структуры (технический синтез).
- Выбор элементов схемы регулирования с учетом статических, динамических, энергетических, эксплуатационных и др. требований и согласование их между собой по статическим и энергетическим характеристикам (процедура не формализована - инженерное творчество).
- Определение алгоритмической структуры (теоретический синтез) производится с помощью математических методов и на основании требований, записанных в чёткой математической форме. Определение законов регулирования и расчет корректирующих устройств, обеспечивающих заданные требования.
- Уточнение структурной схемы системы регулирования, выбора и расчета ее элементов и параметров.
- Экспериментальное исследование системы (или отдельных ее частей) в лабораторных условиях и внесение соответствующих исправлений в ее схему и конструкцию.
- Проектирование и производство системы регулирования.
- Наладка системы в реальных условиях работы (опытная эксплуатация).
Проектирование САУ начинают с выбора объекта управления и основных функциональных элементов (усилителей, исполнительных устройств и др.), то есть разрабатывают силовую часть системы.
Заданные статические и динамические характеристики системы обеспечиваются соответствующим выбором структуры и параметров силовой части, специальных корректирующих устройств и всей САУ в целом.
Назначение корректирующих устройств: обеспечить требуемую точность работы системы и получить приемлемый характер переходного процесса.
Корректирующие звенья вводятся в систему различными способами: последовательно, местная ООС, прямое параллельное включение, внешние (вне контура регулирования) компенсирующие устройства, охват всей САУ стабилизирующей ООС, неединичная главная обратная связь.
Типы электрических корректирующих устройств постоянного тока: активные и пассивные четырехполюсники постоянного тока, дифференцирующие трансформаторы, тахогенераторы постоянного тока, тахометрические мосты и др.
По назначению корректирующие устройства классифицируются:
- СТАБИЛИЗИРУЮЩИЕ – обеспечивать устойчивость САУ и улучшать их статические и динамические характеристики;
- КОМПЕНСИРУЮЩИЕ – уменьшать статические и динамические ошибки при построении САУ по комбинированному принципу;
- ФИЛЬТРУЮЩИЕ – повышение помехозащищенности систем, например фильтрация высших гармоник при демодуляции сигнала прямого канала;
- СПЕЦИАЛИЗИРОВАННЫЕ – для придания системе особых свойств, позволяющих улучшить показатели качества системы.
САУ могут быть построены по следующим структурным схемам:
- С последовательной корректирующей цепью.
Усилитель У должен иметь большое входное сопротивление, чтобы не шунтировать выход корректирующей цепи.
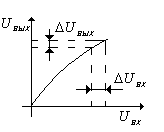
Применяется в случае медленно изменяющихся входных воздействиях, так как при больших рассогласованиях происходит насыщение в реальных нелинейных элементах, частота среза уходит влево и система медленно выходит из состояния насыщения.
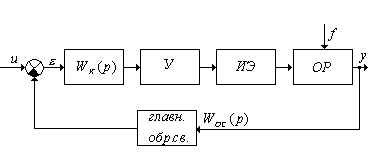
Рис.1.
Последовательная коррекция часто используется в системах стабилизации либо для коррекции контура с корректирующей обратной связью.
- уменьшается.
- Со встречно–параллельной корректирующей цепью.
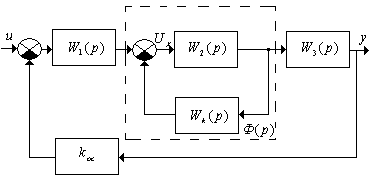
Рис.2.
поступает на вход как разность и глубокого насыщения не наступает.
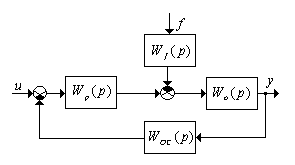
- С последовательно–параллельной корректирующей цепью.
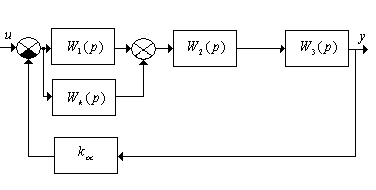
Рис.3.
- С комбинированными корректирующими цепями.
Принцип построения многоконтурной САУ с каскадным включением регуляторов называют принципом подчинённого регулирования. Синтез САУ подчинённого регулирования с двумя и более контурами проводится путём последовательной оптимизации контуров, начиная с внутреннего.
Расчёт систем делится на 2 этапа: статический и динамический.
Статический расчёт заключается в выборе основных звеньев системы, входящих в её главную цепь, составление структурной схемы последней и определение параметров основных элементов системы (коэффициентов усиления, обеспечивающих требуемую точность, постоянных времени всех элементов, передаточных чисел, передаточных функций отдельных звеньев, мощности двигателя). Кроме того, сюда входит расчёт и проектирование магнитных и полупроводниковых усилителей и выбор транзисторных или тиристорных преобразователей, двигателей, чувствительных элементов и других вспомогательных устройств систем, а также расчёт точности в установившемся режиме работы и чувствительности системы.
Динамический расчёт включает большой комплекс вопросов, связанных с устойчивостью и качеством переходного процесса (быстродействием, характеристикой отработки и динамической точностью работы системы). В процессе расчёта выбираются корректирующие цепи, места их включения и определяются параметры последних. Проводится также расчёт кривой переходного процесса или моделирование системы с целью уточнения полученных качественных показателей и учёта некоторых нелинейностей.
Платформы, на которых строятся стабилизирующие алгоритмы:
- Классическая (дифференциальные уравнения - временные и частотные методы);
- Нечеткая логика;
- Нейронные сети;
- Генетические и муравьиные алгоритмы.
Методы синтеза регуляторов:
- Классическая схема;
- ПИД – регуляторы;
- Метод размещения полюсов;
- Метод ЛЧХ;
- Комбинированное управление;
- Множество стабилизирующих регуляторов.
Классический синтез регуляторов
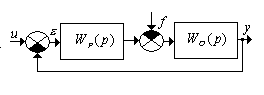
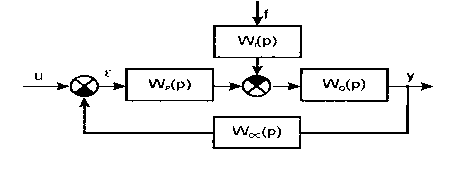
Классическая структурная схема управления объектом приведена на рис. 1. Обычно регулятор включают перед объектом.
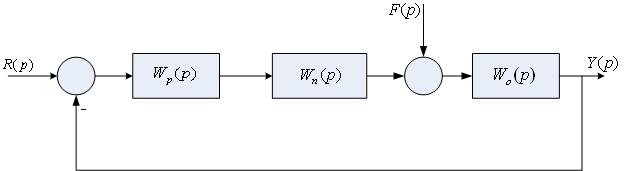
Рис. 1. Классическая структурная схема управления объектом
Задача системы управления состоит в том, чтобы подавить действие внешнего возмуще ния и обеспечить качественные переходные процессы. Эти задачи часто противоречивы. Фактически нам нужно стабилизировать систему так, чтобы она имела требуемые передаточные функции по задающему воздействию и по каналу возмущения :
, .
Для этого мы можем использовать только один регулятор , поэтому такую систему называют системой с одной степенью свободы.
Эти две передаточные функции связаны равенством
.
Поэтому , изменяя одну из передаточных функций, автоматически меняем и вторую. Таким образом, их невозможно сформировать независимо и решение всегда будет некоторым компромиссом.
Посмотрим, можно ли в такой системе обеспечить нулевую ошибку, то есть, абсолютно точное отслеживание входного сигнала. Передаточная функция по ошибке равна
Для того, чтобы ошибка всегда была нулевой, требуется, чтобы эта передаточная функция была равна нулю. Поскольку ее числитель - не нуль, сразу получаем, что знаменатель должен обра щаться в бесконечность. Мы можем влиять только на регулятор , поэтому получаем . Таким образом, для уменьшения ошибки нужно
увеличивать коэффициент усиления регулятора.
Однако нельзя увеличивать усиление до бесконечности. Во-первых, все реальные устрой ства имеют предельно допустимые значения входных и выходных сигналов. Во-вторых, при большом усилении контура ухудшается качество переходных процессов, усиливается влияние возмущений и шумов, система может потерять устойчивость. Поэтому в схеме с одной степе нью свободы обеспечить нулевую ошибку слежения невозможно.
Посмотрим на задачу с точки зрения частотных характеристик. С одной стороны, для ка чественного отслеживания задающего сигнала желательно, чтобы частотная характеристи ка была примерно равна 1 (в этом случае ). С другой стороны, с точки зрения робастной устойчивости нужно обеспечить на высоких частотах, где ошибка моде лирования велика. Кроме того, передаточная функция по возмущению должна быть такой, что бы эти возмущения подавлять, в идеале мы должны обеспечить .
Выбирая компромиссное решение, обычно поступают следующим образом:
на низких частотах добиваются выполнения условия , что обеспечивает хорошее слежение за низкочастотными сигналами; при этом , то есть, низкочастотные возмущения подавляются;
на высоких частотах стремятся сделать , чтобы обеспечить робастную устойчи вость и подавление шума измерений; при этом то есть система фактиче ски работает как разомкнутая, регулятор не реагирует на высокочастотные помехи.
Расчет линейных непрерывных САУ по заданной точности
в установившемся режиме работы
Одно из основных требований, которым должна удовлетворять САУ, заключается в обеспечении необходимой точности воспроизведения задающего (управляющего) сигнала в установившемся режиме работы.
Порядок астатизма и передаточный коэффициент системы находят исходя из требований к точности в установившемся режиме. Если передаточный коэффициент системы, определённый по требуемой величине статизма и добротности (в случае астатической САУ), оказывается настолько большим, что существенно затрудняет даже просто стабилизацию системы, целесообразно повысить порядок астатизма и этим свести до нуля заданную установившуюся ошибку вне зависимости от значения передаточного коэффициента системы. В результате становится возможным величину этого коэффициента выбирать, исходя только из соображений устойчивости и качества переходных процессов.
Пусть структурная схема САР приведена к виду
Тогда в квазиустановившемся режиме работы САР рассогласование представимо в виде сходящегося ряда
,
где выполняют роль весовых констант.
Очевидно, что такой процесс может иметь место только в том случае, если –медленно меняющаяся и достаточно плавная функция.
Если представить передаточную функцию разомкнутой системы в виде
,
то при r=0
при r=1
при r=2
при r=3
Низкочастотная часть логарифмических амплитудных частотных характеристик обусловливает точность работы системы при отработке медленно меняющихся сигналов управления в установившемся состоянии и определяется коэффициентами ошибок. Коэффициенты ошибок больше не оказывают существенного влияния на точность САУ, и их можно не учитывать при практических расчётах.
1. Расчет установившегося режима работы САР по заданным коэффициентам рассогласования (ошибки)
Точность работы системы в установившемся режиме определяется величиной передаточного коэффициента разомкнутой системы , который определяется в зависимости от формы задания требований к точности системы.
Расчет ведется следующим образом.
- СТАТИЧЕСКИЕ САР. Здесь задается величина коэффициента позиционной ошибки , по которому определяется : .
L,
дБ
20lgkpc
, с-1
- АСТАТИЧЕСКИЕ СИСТЕМЫ 1-го порядка.
В этом случае задан коэффициент , по которому определяется
Если заданы коэффициенты и , то , который определяет положение низкочастотной асимптоты ЛАЧХ разомкнутой системы с наклоном -20 дБ/дек, а вторая асимптота имеет наклон -40 дБ/дек при сопрягающей частоте (рис.1).
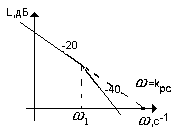
Рис.1.
- АСТАТИЧЕСКИЕ СИСТЕМЫ 2-го порядка.
По заданному коэффициенту определим kpc:
L,
дБ
-40
, с-1
2. Расчет установившегося режима работы САР по заданной максимальной величине рассогласования (ошибки) системы
На основании допустимого значения установившейся ошибки и вида управляющего воздействия выбираются параметры низкочастотной части ЛАЧХ системы.
- Пусть заданы допустимая максимальная ошибка при гармоническом воздействии с амплитудой и частотой и порядок астатизма системы.
Тогда низкочастотная асимптота ЛАЧХ системы должна проходить не ниже контрольной точки с координатами:
(1)
и иметь наклон -20r дБ/дек. Зависимость (1) справедлива при .
- Пусть заданы допустимая максимальная ошибка при максимальной скорости и максимальное ускорение входного воздействия и порядок астатизма r системы.
Часто удобно пользоваться методом эквивалентного синусоидального воздействия, предложенного Я.Е. Гукайло.
В этом случае определяется режим, при котором амплитуды скорости и ускорения равны максимальным заданным значениям. Пусть входное воздействие изменяется в соответствии с заданным законом
. (2)
Приравнивая амплитудные значения скорости и ускорения, полученные дифференцированием выражения (2), заданным значениям и , получим
откуда , . По этим величинам можно построить контрольную
точку В с координатами и
при единичной отрицательной обратной связи,
при неединичной обратной связи.
Если скорость сигнала на входе максимальна, а ускорение убывает, то контрольная точка будет двигаться по прямой с наклоном -20 дБ/дек в диапазоне частот . Если же ускорение равно максимальному значению, а скорость убывает, то контрольная точка движется по прямой с наклоном -40дБ/дек в диапазоне частот .
Область, расположенная ниже контрольной точки В и двух прямых с наклонами -20дБ/дек и -40дБ/дек, представляет собой запретную область для ЛАЧХ следящей системы. Так как точная ЛАЧХ проходит ниже точки пересечения двух асимптот на 3 дБ, то желаемая характеристика при должна быть поднята вверх на эту величину, т.е.
.
При этом требуемое значение добротности по скорости , а частота в точке пересечения второй асимптоты с осью частот (рис.2)
.
В том случае, когда управляющее воздействие характеризуется только максимальной скоростью, добротность системы по скорости при заданном значении ошибки:
.
Если задано только максимальное ускорение сигнала и величина ошибки, то добротность по ускорению:
.
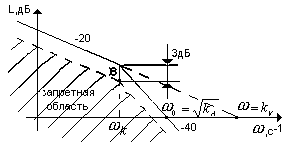
Рис.2.
- Пусть задана максимальная статическая ошибка по каналу управления (входное воздействие ступенчатое , система статическая по каналу управления).
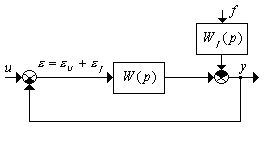
Рис.3.
Тогда величина определяется из выражения . Статическую точность автоматической системы можно определить из уравнения:
,
где – статическая точность замкнутой системы,
– отклонение регулируемой величины в разомкнутой системе,
– передаточный коэффициент разомкнутой системы, требуемый для обеспечения заданной точности.
- Пусть задана максимальная допустимая статическая ошибка по каналу возмущения (возмущающее воздействие ступенчатое , система статическая по каналу возмущения, рис.3).
Тогда величина определяется из выражения:
,
где – передаточный коэффициент разомкнутой системы по каналу возмущения,
где – ошибка системы без регулятора.
В статических системах управления установившаяся ошибка, вызванная постоянным возмущающим воздействием, уменьшается по сравнению с разомкнутой системой в 1+. При этом в 1+ раз уменьшается также и передаточный коэффициент замкнутой системы.
- Пусть задана допустимая скоростная ошибка от управляющего воздействия (входное воздействие изменяется с постоянной скоростью , система астатическая первого порядка).
Следящие системы проектируют обычно астатическими первого порядка. Они работают при переменном управляющем воздействии. Для таких систем в установившемся режиме наиболее характерным является изменение входного воздействия по линейному закону.
Тогда добротность системы по скорости определяется из выражения:
.
Поскольку установившаяся ошибка определяется низкочастотной частью ЛАЧХ, то по вычисленному значению передаточного коэффициента может быть построена низкочастотная асимптота желаемой ЛАЧХ.
3. Расчет установившегося режима работы САР по заданной максимальной допустимой ошибке системы с неединичной обратной связью
Пусть априорная информация о входном сигнале сведена к минимуму:
- Максимальное по модулю значение первой производной входного воздействия (максимальная скорость слежения) – ;
- Максимальное по модулю значение второй производной входного воздействия (максимальное ускорение слежения) – ;
- Входное воздействие может быть детерминированным или случайным сигналом с любой спектральной плотностью.
Требуется ограничить максимально допустимую ошибку системы управления при воспроизведении полезного сигнала в установившемся режиме работы величиной .
Требование к точности воспроизведения наиболее просто формулируется для гармонического входного воздействия эквивалентного реальному входному сигналу:
в предположении, что амплитуда и частота заданы, а начальная фаза имеет произвольное значение.
Установим связь между допустимой ошибкой воспроизведения входного воздействия и параметрами системы и входного сигнала.
Пусть структурная схема непрерывной САУ сведена к виду (рис.4).
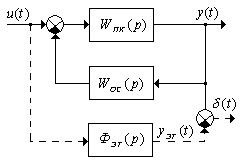
Рис.4.
Ошибка на выходе системы во временной области определяется выражением:
,
где – эталонная (безошибочная) выходная функция.
Можно показать, что вследствие ограничений на скорости и ускорения выходная функция отличается от ступенчатой.
Отобразим последнее выражение в пространство преобразований Лапласа:
.
Отобразим в пространство преобразований Фурье:
.
В области низких частот (, –постоянные времени цепи обратной связи) , тогда
, ,
максимальная амплитуда ошибки определяется по выражению:
.
В реальных системах на низких частотах обычно , ибо следует выполнить требование ; математическое выражение для определения преобразуется на контрольной частоте () к виду
и для того, чтобы выходная функция воспроизводилась с максимальной ошибкой не более заданной , ЛАЧХ проектируемой системы не должна проходить ниже контрольной точки с координатами и
.
4. Расчет установившегося режима работы статической САУ методом предельных переходов
Утверждение
Пусть задана обобщенная структурная схема статической САР:
где , , , , здесь полиномы числителей и знаменателей не содержат множителя p (свободные члены их равны единице),
– передаточный коэффициент регулятора,
– передаточный коэффициент объекта по каналу управления,
– передаточный коэффициент обратной связи,
– передаточный коэффициент объекта по каналу возмущения,
причем в первом приближении статические и динамические передаточные коэффициенты звеньев приняты равными, номинальному входному воздействию соответствует номинальная величина выходной функции по каналу управления, и пусть заданы величина ступенчатого возмущающего воздействия и – допустимая статическая ошибка по каналу возмущения в % от номинального значения выходной функции .
Тогда передаточные коэффициенты системы по каналам управления и возмущения в установившемся режиме равны статическим передаточным коэффициентам замкнутой системы и определяются по формулам:
(1)
Уравнения статики по каналам управления и возмущения имеют вид
(2)
Передаточные коэффициенты регулятора и цепи обратной связи определяются по выражениям:
(3)
Способы повышения статической точности САУ
- Увеличение передаточного коэффициента разомкнутой системы в статических системах.
, где , .
Однако условия устойчивости при увеличении ухудшаются, то есть увеличиваются погрешности в динамике.
- Введение в регулятор интегральной составляющей.
2.1. Применение И-регулятора: .
В этом случае система становится астатической по каналам управления и возмущения, а статическая ошибка становится равной нулю. ЛАЧХ системы пойдет значительно круче исходной, а фазовый сдвиг увеличивается на – 90 градусов. Система может оказаться неустойчивой.
2.2. Установка ПИ-регулятора : .
Здесь статическая ошибка равна нулю, а условия устойчивости лучше, чем у системы с И-регулятором.
2.3. Использование ПИД-регулятора : .
Статическая ошибка системы равна нулю, а условия устойчивости лучше, чем в системе с ПИ-регулятором.
- Введение в систему неединичной обратной связи, если требуется точное воспроизведение информационного уровня входного сигнала.
Полагаем, что и - статические звенья. , требуется подобрать такое ,
чтобы ; .
- Масштабирование входного
воздействия.
Здесь .
Выходная функция будет равна информационному уровню входного воздействия, если , отсюда , где .
- Применение принципа компенсации по каналам управления и возмущения.
Расчет компенсирующих устройств изложен в разделе «Расчет систем комбинированного управления».
Расчёт динамики САУ
Синтез САУ по ЛЧХ
В настоящее время разработано большое число методов синтеза корректирующих устройств, которые подразделяются на:
- аналитические методы синтеза, в которых используются аналитические выражения, связывающие показатели качества системы с параметрами корректирующих устройств;
- графо-аналитические.
Самый удобный из графо-аналитических методов синтеза – классический универсальный метод логарифмических частотных характеристик.
Сущность метода заключается в следующем. Сначала строят асимптотическую ЛАЧХ исходной системы, затем строят желаемую ЛАЧХ разомкнутой системы; ЛАЧХ корректирующего устройства должна так изменить форму ЛАЧХ исходной системы, чтобы ЛАЧХ скорректированной системы .