Расчет системы автоматизированного электропривода рабочей машины
федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
«НОВГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
имени Ярослава Мудрого
Кафедра
Расчетно-графическая работа
по дисциплине
«Электропривод и электрооборудование»
Разработал
студент гр. 0412 зу
__________ Гутман А. А.
«____»_________20 г.
Проверил доцент
___________Андрианов Н. М.
«____»_________20 г
г. Великий Новгород.
2013 год.
Содержание
|
Введение |
стр. 3 |
|
Данные для построения нагрузочной диаграммы |
стр. 4 |
|
Расчетная часть |
стр. 5 |
|
Схема автоматизированного электропривода |
стр. 17 |
|
Список используемой литературы |
стр. 19 |
|
Приложения |
стр. 20 |
Введение
Электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электродвигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических и динамических характеристик электропривода, отвечающих требованиям производственного механизма.
Целью данной курсовой работы является расчет системы автоматизированного электропривода рабочей машины
Построение нагрузочной диаграммы.
|
Р1 |
Р2 |
Р3 |
Р4 |
t1 |
t2 |
t3 |
t4 |
Jдв |
JM |
nH |
пер |
Х |
i |
|
кВт |
кВт |
кВт |
кВт |
мин |
мин |
мин |
мин |
Н |
Н |
об/мин |
|||
|
8 |
9 |
4 |
6 |
15 |
5 |
10 |
3 |
0,28 |
0,42 |
1455 |
1,6 |
2,2 |
Расчетная часть
1.1.По данным нагрузочной диаграммы, используя метод эквивалентных величин, определяем необходимую мощность приводного электродвигателя по нагреву
|
(1.1) |
где
Pi - мощность на валу электродвигателя в i-й интервал работы, (кВт);
ti - продолжительность i-го интервала работы, (мин);
n - количество интервалов нагрузки.
Отсюда
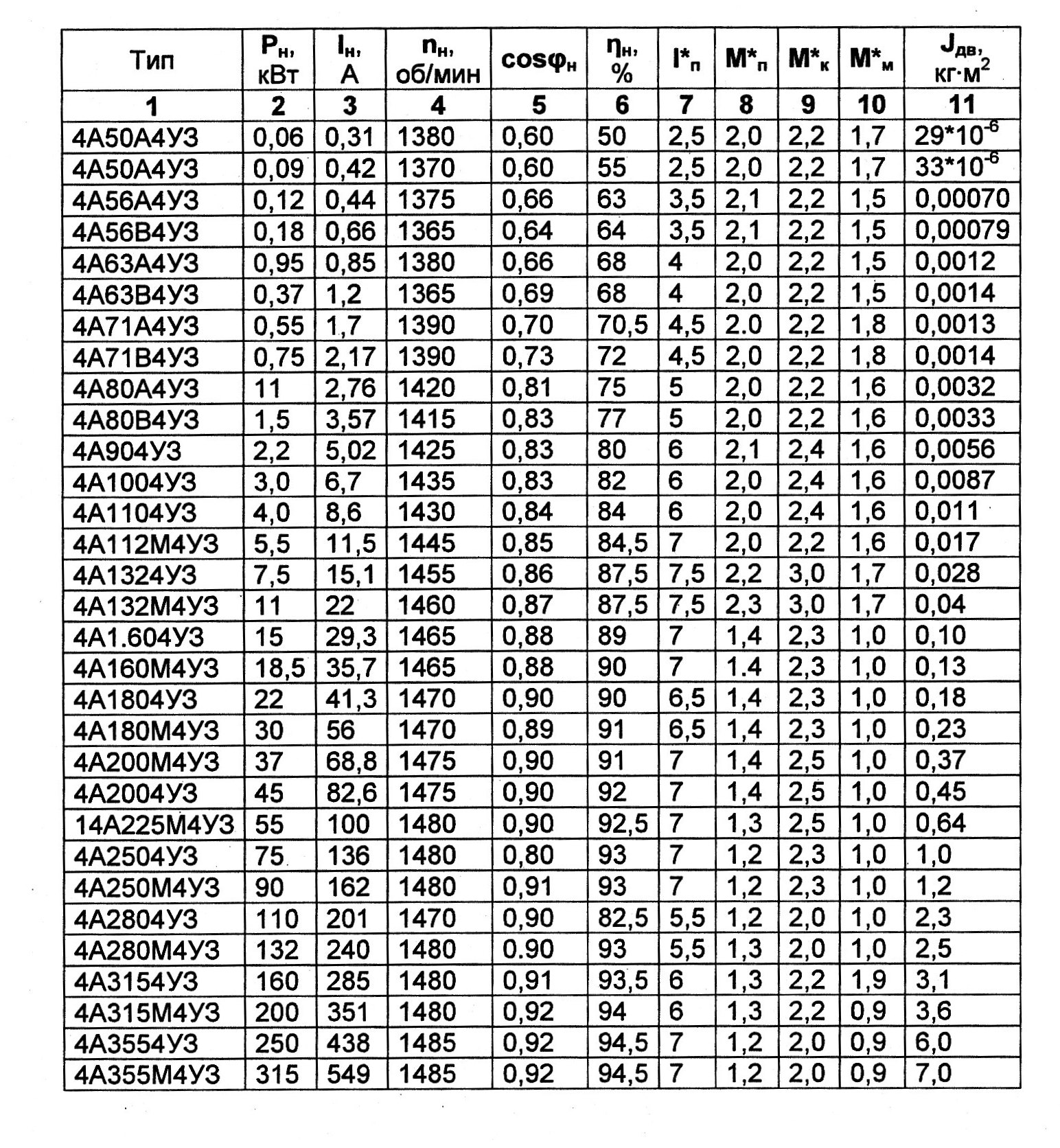
Мощность электродвигателя при его полном охлаждении во время паузы в работе выбирают по каталогу (приложение А) исходя из условия, что Рэ должна быть меньше Рн. Данному условию соответствует электродвигатель серии 4А типа 4А1324УЗ.
Каталожные параметры двигателя приведены в таблице 1.
Таблица 1
|
Типоразмер электродвигателя |
РН, кВт |
UH, В |
IН, А |
nН, мин-1 |
min |
П |
К |
cosН |
Н, % |
SH |
Ki |
Jдв, кг·м2 |
|
4А1324УЗ |
7,5 |
382 |
15,1 |
1455 |
1,7 |
2,2 |
3,0 |
0,86 |
87,5 |
0,03 |
7,5 |
0,028 |
Номинальное скольжение электродвигателя, соответствующее номинальному вращающему моменту рассчитывается по формуле
|
(1.2) |
где
n0 - синхронная частота вращения магнитного поля статора электродвигателя, (мин)-1;
|
(1.3) |
где
р - число пар полюсов электродвигателя;
f - частота тока в электрической сети, f = 50 Гц;
Отсюда
Пусковой ток определяется по формуле
|
(1.4) |
Отсюда
1.2. Механическую характеристику асинхронного электродвигателя = f1(Mдв) строят на основании каталожных данных. Для этого необходимо вычислить его вращающие моменты для следующих угловых скоростей, соответствующих скольжениям: 0; SH; SK; Smin= 0,8 и SП = 1,0.
Для более точного построения механической характеристики следует увеличить число расчетных точек и для заданных скольжений определить моменты и частоту вращения.
Вращающие моменты электродвигателя для точек механической характеристики электродвигателя можно вычислить приблизительно для скольжений S от 0 до 1 с интервалом 0,1 на основании упрощенной формулы Клосса
|
(1.6) |
где
– максимальный вращающий момент электродвигателя, Нм;
- критическое скольжение электродвигателя, соответствующее максимальному вращающему моменту.
Найдем вращающие моменты электродвигателя. Для этого необходимо вычислить вращающий пусковой момент МП электродвигателя при SП = l,0 и критическое скольжение электродвигателя, соответствующее максимальному вращающему моменту.
Вращающий пусковой момент МП электродвигателя при SП = l,0, определяем, используя кратность пускового П по выражению
|
(1.5) |
где
- номинальный вращающий момент электродвигателя, (Нм);
– номинальная угловая скорость вращения вала электродвигателя, (рад/с)
nн – номинальная частота вращения, (мин-1).
Найдем номинальный вращающий момент электродвигателя. Для этого вычислим номинальную угловую скорость вращения вала электродвигателя.
Отсюда
Критический момент
Критическое скольжение
Отсюда
Данные расчета механической характеристики = f1(Mдв) свести в таблицу 2. Переход от скольжения к угловой скорости производится по формуле
|
(1.7) |
где
- синхронная угловая скорость вращения вала, рад/с
где
р - число пар полюсов электродвигателя;
f - частота тока в электрической сети, f = 50 Гц;
Вычислим угловую скорость. Для этого найдем синхронную угловую скорость вращения вала
Отсюда
Таблица 2.
Данные к построению механической характеристики асинхронного двигателя
|
S |
0 |
SH |
0,1 |
SK |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
,рад/c |
157 |
152,7 |
141,3 |
129,7 |
125,6 |
109,9 |
94,2 |
78,5 |
62,8 |
47,1 |
31,4 |
15,7 |
0 |
|
Мдв,Нм |
0 |
49 |
126 |
147 |
146 |
128 |
89 |
91 |
79 |
69 |
61 |
55 |
51 |
При построении механических характеристик = f1(Mдв) значения располагают по оси ординат (функция), а значения М - по оси абсцисс (аргумент).
Интерполируя механическую характеристику двигателя в ее пусковой части, следует учесть, что при скольжениях S > SK формула Клосса занижает действительные вращающие моменты. В частности для S = 0,4 вращающий момент, вычисленный по (8), будет несколько занижен.
1.3. Номинальный момент на валу рабочей машины ММН, соответствующий номинальной частоте вращения ее рабочего органа nМН, принимаем равным
где
– передаточное отношение передаточного механизма от электродвигателя к рабочей машине;
µпер – КПД передаточного механизма (для всех вариантов µпер принять равным µпер = 0,9).
Для приведения моментов вращения рабочей машины к валу электродвигателя, используют соотношение
(10)
где МС – приведенный момент сопротивления, Нм.
С учетом выражения (10) приведенный момент статического сопротивления на валу электродвигателя запишется
(11)
где
ММ0 – момент сопротивления холостого хода, Нм;
Х – показатель степени, определяющий характер протекания зависимости = f2(МС).
Рассчитаем номинальный момент на валу рабочей машины ММН
Значение ММ0 принимается равным ММ0 = 0,2ММН. Отсюда
Присваивая значения от 0 до 0, рассчитывают зависимость = f2(МC). Полученные значения заносятся в таблицу 3.
Таблица 3
Данные к построению механической характеристики рабочей
машины, приведенной к валу электродвигателя
|
,рад/c |
0 |
141 |
125,6 |
109,9 |
94,2 |
78,5 |
62,8 |
47,1 |
31,4 |
15,7 |
152,7 |
|
МС,Нм |
9,75 |
43,5 |
37,6 |
32,6 |
27,2 |
22,9 |
19 |
15,3 |
12,8 |
10,7 |
49 |
На основании расчетных данных строится кривая = f2(МC) на том же графике, что и механическая характеристика электродвигателя = f1(Mдв). Необходимо обратить внимание, что в точке с координатами МН и Н указанные характеристики должны пересечься.
1.4. Используя построенные механические характеристики электродвигателя = f1(Mдв) и рабочей машины = f2(МC), графически находим их разность – кривую избыточного (динамического) момента: = f3(Мизб) = f3(Mдв - МC). Эту кривую заменяем ступенчатой с участками, на которых избыточный момент постоянен и равен его среднему значению Мизб. i.
По ступенчатой кривой избыточного (динамического) момента = f3(Мизб) = f3(Mдв - МC) находим нач и кон. Заносим данные в таблицу 4.
На основе начальной и конечной угловой скорости находим интервал изменения угловой скорости на i-м участке
Продолжительность разгона электропривода на каждом i-м участке угловых скоростей рассчитывают по выражению
где
- приведенный момент инерции системы электродвигатель – рабочая машина относительно вала электродвигателя. (k – коэффициент, учитывающий момент инерции передаточного механизма от электродвигателя к рабочей машине. k=1,2.);
– интервал изменения угловой скорости на i-м участке, рад/с;
Мизб. i – средний избыточный момент на i-м участке, принимаемый постоянным, Нм.
Найдем приведенный момент инерции системы электродвигатель – рабочая машина относительно вала электродвигателя
Найдем продолжительность разгона электропривода на каждом i-м участке угловых скоростей
Полная продолжительность пуска равна сумме частичных продолжительностей
где т – количество ступеней, на которые разбивается кривая избыточных (динамических) моментов.
Результаты расчета сводятся в таблицу 4.
Таблица 4.
Данные расчета продолжительности пуска электропривода с нагрузкой
|
Номера участков |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
|
нач, рад/с |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
130 |
140 |
|
кон, рад/с |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
130 |
140 |
150 |
|
, рад/с |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
|
Мизб. i, Нм |
42 |
44 |
46,5 |
49 |
52,5 |
56 |
60 |
66,5 |
73,5 |
82,5 |
92,5 |
100 |
109 |
100 |
60 |
|
ti, с |
0,097 |
0,093 |
0,088 |
0,083 |
0,078 |
0,073 |
0,068 |
0,061 |
0,055 |
0,049 |
0,044 |
0,041 |
0,037 |
0,041 |
0,068 |
|
с |
0,976 |
По времени разгона системы привода сделать вывод о степени тяжести пуска электродвигателя.
1.5 Для оценки возможности запуска электродвигателя при нагрузке в случае снижения напряжения на U% необходимо пересчитать вращающие моменты электродвигателя прямо пропорционально квадрату напряжения по формуле
где
М(Uн) - вращающий момент асинхронного электродвигателя при номинальном напряжении, Нм;
М(U) – вращающий момент асинхронного электродвигателя при той же частоте вращения, но при пониженном напряжении, Нм;
– относительное значение снижения напряжения. . (U% принять равным 20%.)
и построить зависимость = f4(Мдв(U)), совместив ее с механической характеристикой рабочей машины, приведенной к валу электродвигателя. Это позволит сделать заключение: электродвигатель не запустится, запустится или электродвигатель «застрянет» и не развернется до частоты вращения, соответствующей рабочему участку его механической характеристики.
Найдем относительное значение снижения напряжения
Найдем вращающий момент асинхронного электродвигателя при той же частоте вращения, но при пониженном напряжении
Таблица 5.
Вращающий момент асинхронного электродвигателя при пониженном напряжении
|
,рад/c |
157 |
152,7 |
141,3 |
129,7 |
125,6 |
109,9 |
94,2 |
78,5 |
62,8 |
47,1 |
31,4 |
15,7 |
0 |
|
Мдв,Нм |
0 |
49 |
126 |
147 |
146 |
128 |
89 |
91 |
79 |
69 |
61 |
55 |
51 |
|
М(U),Нм |
0 |
31 |
80,5 |
94 |
93,5 |
82 |
70 |
58 |
50,5 |
44 |
39 |
35 |
32,5 |
На основании расчетных данных строится зависимость = f4(Мдв(U)), совместив ее с механической характеристикой рабочей машины, приведенной к валу электродвигателя. Это позволит сделать заключение: электродвигатель не запустится, запустится или электродвигатель «застрянет» и не развернется до частоты вращения, соответствующей рабочему участку его механической характеристики.
Если хотя бы на одном участке механических характеристик разгона электропривода Мизб(U) < 0, то необходимо сделать заключение, что при пуске с нагрузкой и понижении питающего напряжения на U% электропривод не запустится.
Схема автоматизированного электропривода
Схема автоматизированного электропривода насосов для откачки воды из водозаборного бассейна шахты изображена на чертеже 1.
Режимы работы.
Схема работает в двух режимах в зависимости от положения переключателя режимов SA:
- в ручном режиме (P)-управляется диспетчером;
- в автоматическом режиме.
В ручном режиме схема работает при наладке после ремонта или при сбое автоматического режима (в случае не включения двигателя в автоматическом режиме).
Основной режим - автоматический.
В автоматическом режиме диспетчеру следует только задать, какой из насосов будет основным, а какой - вспомогательным.
Если основным насосом выбирается насос №2, то диспетчер нажимает на возвратную кнопку SBC. При этом срабатывает промежуточное реле КL1, которое при срабатывании своими нормально-разомкнутыми контактами KL1 переводит цепь “C”-KL1:1 – SBT – KL1 – “N” в режиме самопитания (теперь после возврата кнопки SBC катушка реле KL1 остается под током), а KL1:3 подготавливает цепь питания катушки контактора КМ2 (“C” - A - KL4:1 - KL3:1 - KM2 – KST3 – KST4 - SBT2 – “N”) к работе основным двигателем двигатель М2. В этом состоянии цепь питания контактора КМ2 находится в ждущем режиме и при наличии воды в бассейне (включено реле KL5) ждет повышения уровня воды до замыкания контактов Э3 в датчике В.
В тоже время короткозамкнутый контакт KL1:2 разрывает цепь питания катушки контактора КМ1 (так как двигатель насоса М1 назначается вспомогательным).
Если же уровень воды в бассейне достигает электродов ЭЗ (датчик В), то выключается промежуточное реле KL4 и замыкает цепи питания катушек КМ1 и КМ2 (своими нормально-разомкнутыми контактами KL4:1). При этом срабатывает только контактор КМ 2 (контактор основного насоса №2) и подключает двигатель М1 к сети, а контактор КМ1 не срабатывает, так как контакторы KL1:3 и KL3:1 разомкнуты. В случае, если при работающем основном двигателе (в данном случае М2) вода продолжает прибывать и уровень ее достигает контактов Э2 датчика В, то включается реле KL3 и своими контактами KL3:2 подключает цепь питания контактора КМ1 (“C” - A – KL3:2 – KM1 – KST1 – KST2 – SBT1 – “N”) к сети, что приводит к включению двигателя М1 (который в данном случае выбран диспетчером вспомогательным).
Если же при включении и второго двигателя насосы не справляются с откачкой воды (то есть уровень воды все равно повышается и достигает контактов Э1 датчика В), то замыкается цепь питания катушки реле KL2, которое своими контактами включает звуковой сигнал и индикацию на пульте диспетчера HL3 «Переполнение».
Индикация HL1 «Насос №1 включен» и HL2 «Насос №2 включен» на пульте диспетчера обеспечиваются несиловыми нормально-разомкнутыми контактами КМ1:5 и КМ2:5 соответственно.
Если же диспетчер назначает двигатель М1 основным, а М2 – вспомогательным, то он нажимает кнопку SBT. При этом разрывается цепь питания реле KL1(“C” – KL1:1– KL1 “N”), и в ждущий режим включается цепь питания катушки контактора первого насоса КМ1 (по цепи “C” – A - KL4:1(разомкнут) – KL1:2 – KM1 – KST1 – KST2 – SBT1 – “N”), а цепь питания катушки контактора второго насоса КМ2 будет разомкнута (её блокирует контакт KL1:3). Алее работа схемы автоматизированного электропривода будет аналогичной описанной ранее с тем лишь отличием, что основным двигателем будет М1, а дополнительным – М2.
В ручном режиме (режим Р) двигатели могут включаться кнопками SBC1 (двигатель М1 насоса №1) и SBC2 (двигатель М2 насоса №2), а выключаться SBT1 и SBT2 соответственно.
Защита двигателей.
Тепловое реле KST1 и KST2 защищают двигатель М1 от перегрузки, а KST3 и KST4 защищают двигатель М2.
Тепловое реле выбираем типа РТЛ102104 с током теплового расцепителя I т. р. = 16А[3,с. 269, табл. 3.71].
В качестве автомата защиты от токов короткого замыкания применяем автоматические выключатели (SF1 и SF2 на чертеже 1) типа ВАГ51Г-31 со следующими параметрами [3, с.261, табл. 3.62]
- номинальный ток автомата I н. а. = 20 А ;
- номинальный ток расцепителя I н. р. = 20 А ;
- ток отсечки I отс. =140 А.
Проверяем уставку отсечки на отстройку автомата от пусковых токов по условию
I отс. / I п. > 1,25
140/113,25=1,23
Условие не выполняется. Поэтому принимаем отсечку I отс. = 200А.
Список использованной литературы
- Электропривод и электрооборудование: Метод. указания / Сост. Н. М. Андрианов; НовГУ. – Великий Новгород. 2011. – 26 с.
- Коломиец А.П., Кондратьева Н.П., Владыкин И.Р., Юран С.И. Электропривод и электрооборудование. – М.: КолосС, 2006. – 328 с.
- Справочник по проектированию электрических сетей и электрооборудования. Под общ. ред. Ю. Г. Борыбина. – М.: Энергоатомиздат,1991.
- Фролов Ю.В., Шелякин В.П. Основы электрического привода. Краткий Курс. – М.: КолосС, 2007. – 252 с.
Приложения
Приложение А.
Технические данные электродвигателей серии 4А основного исполнения
Расчет системы автоматизированного электропривода рабочей машины