Розробка керуючого автомата і синтез комбінаційних схем
КУРСОВА РОБОТА
«Комп’ютерна логіка»
Розробка керуючого автомата і синтез комбінаційних схем
Зміст
Вступ
- Синтез автомата
- Побудова графічної схеми алгоритму та розмітка станів автомата __2
- Побудова графа та кодування станів автомата ______________________3
- Побудова таблиці переходів тригера __________________________________3
- Побудова структурної таблиці автомата _____________________________4
- Синтез комбінаційних схем для функцій збудження тригерів і
вихідних сигналів ______________________________________________________4
- Синтез комбінаційних схем
- Представлення функції f4 в канонічних формах алгебр Буля,
Жегалкіна, ПІрса і Шеффера____________________________________________6
- Визначення належності f4 до п’яти передповних класів______________8
- Мінімізація функції f4__________________________________________________8
- Спільна мінімізація системи функцій f1, f2, f3_________________________11
- Одержання операторних форм для реалізації на ПЛМ_________________15
Висновок_____________________________________________________________________17
Список літератури___________________________________________________________18
Додаток___________________________________________________________18
Вступ
Керуючий автомат – це електрична схема, призначена для зберігання й перетворення двійкових змінних по заданому алгоритму.
Комбінаційні схеми здійснюють відображення визначеної множини вхідних логічних змінних у вихідні.
Практичнее застосування данного автомата можливе в області обчислювальної техніки.
У даній роботі розробка керуючого автомата і синтез комбінаційних схем виконується на підставі «Технічного завдання ІАЛЦ.463626.002 ТЗ».
- Синтез автомата
- Побудова графічної схеми алгоритму та розмітка станів автомата
Відповідно до технічного завдання складаємо графічну схему алгоритму (рис 1.1) з урахуванням тривалості сигналів і виконуємо розмітку станів автомата.
- Побудова графа та кодування станів автомата
Згідно з блок-схемою алгоритму будуємо граф автомата Мура та виконуємо кодування станів (рис 1.2).
Рисунок 1.2 Граф автомата зі закодованими вершинами.
- Побудова таблиці переходів тригера.
Для синтезу логічної схеми автомата необхідно виконати синтез функцій збудження тригерів та вихідних функції автомата. Автомата має 9 станів, тому кількість тригерів за формулою дорівнює K >= ]log2N[ = ]log29[ = 4.
Запишемо таблицю переходів RS-тригерів, на яких необхідно використати у побудові автомата (рис.1.3):
Рисунок 1.3 Таблиця переходів тригера
- Побудова структурної таблиці автомата
Використовуючи дані графа автомата з рис.1.2 заповнюємо структурну таблицю (табл. 1.1).
|
Перехід
|
Старий стан
|
Новий стан
|
Вхідні сигнали
|
Вихідні сигнали
|
Функції збудження тригерів
|
|
|
Q4
|
Q3
|
Q2
|
Q1
|
Q4
|
Q3
|
Q2
|
Q1
|
X2
|
X1
|
Y1
|
Y2
|
Y3
|
Y4
|
Y5
|
R4
|
S4
|
R3
|
S3
|
R2
|
S2
|
R1
|
S1
|
|
Z1->Z2
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
1
|
-
|
0
|
0
|
0
|
0
|
0
|
-
|
0
|
0
|
1
|
-
|
0
|
-
|
0
|
|
Z2->Z3
|
0
|
1
|
0
|
0
|
0
|
1
|
0
|
1
|
-
|
-
|
1
|
1
|
0
|
0
|
0
|
-
|
0
|
0
|
-
|
-
|
0
|
0
|
1
|
|
Z3->Z2
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
-
|
1
|
0
|
0
|
0
|
0
|
-
|
0
|
0
|
-
|
-
|
0
|
1
|
0
|
|
Z3->Z4
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
1
|
0
|
-
|
1
|
0
|
0
|
0
|
0
|
-
|
0
|
1
|
0
|
-
|
0
|
0
|
-
|
|
Z1->Z4
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
-
|
0
|
0
|
0
|
0
|
0
|
-
|
0
|
-
|
0
|
-
|
0
|
0
|
1
|
|
Z4->Z5
|
0
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
-
|
-
|
0
|
0
|
0
|
1
|
1
|
-
|
0
|
-
|
0
|
0
|
1
|
0
|
-
|
|
Z5->Z5
|
0
|
0
|
1
|
1
|
0
|
0
|
1
|
1
|
0
|
-
|
0
|
1
|
0
|
0
|
0
|
-
|
0
|
0
|
-
|
0
|
-
|
0
|
-
|
|
Z5->Z6
|
0
|
0
|
1
|
1
|
0
|
1
|
1
|
1
|
1
|
-
|
0
|
1
|
0
|
0
|
0
|
-
|
0
|
0
|
1
|
0
|
-
|
0
|
-
|
|
Z6->Z7
|
0
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
-
|
-
|
0
|
0
|
1
|
0
|
0
|
0
|
1
|
0
|
-
|
0
|
-
|
0
|
-
|
|
Z7->Z8
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
0
|
-
|
-
|
1
|
0
|
1
|
0
|
0
|
0
|
-
|
0
|
-
|
0
|
-
|
1
|
0
|
|
Z8->Z9
|
1
|
1
|
1
|
0
|
0
|
1
|
1
|
0
|
-
|
1
|
1
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
-
|
0
|
-
|
-
|
0
|
|
Z8->Z1
|
1
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
-
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
-
|
0
|
|
Z9->Z1
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
-
|
-
|
0
|
0
|
1
|
0
|
0
|
-
|
0
|
1
|
0
|
1
|
0
|
-
|
0
|
Таблиця 1.1 Структурна таблиця автомата.
1.5 На основі структурної таблиці автомата (табл.1.1) виконаємо синтез комбінаційних схем для вихідних сигналів та функцій збудження тригерів. Аргументами функцій збудження тригерів у автоматі Мура є коди станів та вхідні сигнали, для вихідних сигналів - лише коди станів. Виконаємо мінімізацію вищевказаних функцій за допомогою діаграм Вейча (рис. 1.4, 1.5). Зауважимо, що операторні представлення функцій сформовані враховуючи елементний базис: 3І-НЕ, 2І.
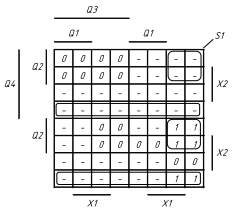
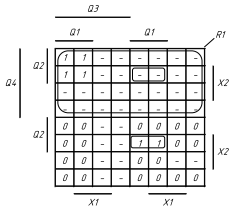
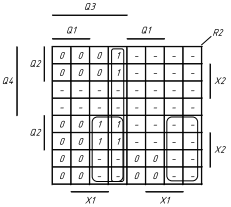
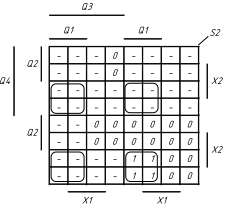
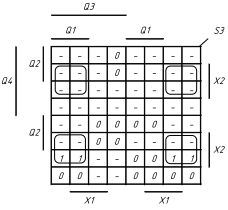
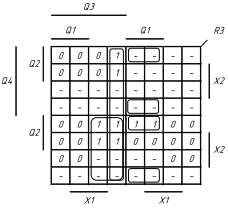
Рисунок 1.4 Мінімізація функцій збудження тригерів
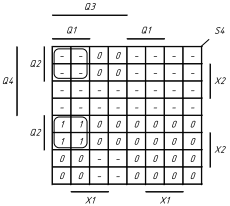
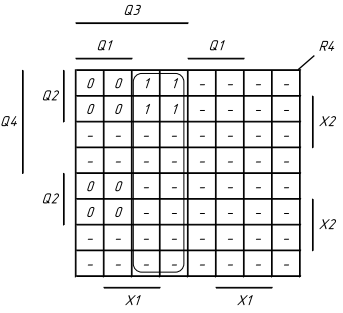
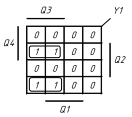
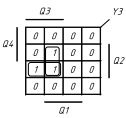
Рисунок 1.5 Мінімізація функцій збудження тригерів та вихідних сигналів
R4 = S4 =
R3 = S3 =
R2 = S2 =
R1 = S1 =
Y1 =
Y2 =
Y3 =
Y4 = Y5 =
Даних достатньо для побудови функцій збудження тригерів та вихідних сигналів, з яких складається автомат. Автомат будуємо на RS-тригерах, роботу яких синхронізує генератор.
Схема даного пристрою виконана згідно з єдиною системою конструкторської документації (ЕСКД) і наведена у документі «Автомат керуючий. Схема електрична функціональна ІАЛЦ.463626.003 Э2».
- Синтез комбінаційних схем
|
X4
|
X3
|
X2
|
X1
|
F4
|
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
1
|
1
|
|
0
|
0
|
1
|
0
|
0
|
|
0
|
0
|
1
|
1
|
1
|
|
0
|
1
|
0
|
0
|
0
|
|
0
|
1
|
0
|
1
|
0
|
|
0
|
1
|
1
|
0
|
0
|
|
0
|
1
|
1
|
1
|
0
|
|
1
|
0
|
0
|
0
|
1
|
|
1
|
0
|
0
|
1
|
1
|
|
1
|
0
|
1
|
0
|
1
|
|
1
|
0
|
1
|
1
|
0
|
|
1
|
1
|
0
|
0
|
1
|
|
1
|
1
|
0
|
1
|
0
|
|
1
|
1
|
1
|
0
|
0
|
|
1
|
1
|
1
|
1
|
1
|
Функцію задано таблицею істинності:
Таблиця 2.1 Таблиця істинності функції.
2.1 Представимо функцію f4 в канонічних формах алгебри Буля, Желагкіна, Пірса та Шеффера.
Алгебра Буля (І, АБО, НЕ)
Запишемо функцію в диз’юнктивній та кон’юнктивній нормальних формах:
FДДНФ =
.
FДКНФ = .
Алгебра Жегалкіна (викл. АБО, І, const 1)
Одержуємо з ДДНФ шляхом наступних замін:
АБО замінити на викл. АБО
= X 1
FДДНФ =







Алгебра Пірса(АБО-НЕ)
Одержуємо з ДКНФ шляхом застосування правила де-Моргана:
FДКНФ =




Алгебра Шеффера (І-НЕ)
Отримуємо з ДДНФ шляхом застосування правила де-Моргана
FДДНФ =






2.2 Визначимо належність функції f4 до 5 передповних класів.
К0 - включає всі функції, які зберігають 0;
К1 - включає всі функції, які зберігають 1;
КС - включає всі самодвоїсті функції;
КЛ - включає всі лінійні функції;
КМ - включає всі функції, які монотонні.
|
Класи
|
К0
|
К1
|
КС
|
КЛ
|
КМ
|
|
|
f4
|
+
|
+
|
-
|
-
|
-
|
|
K0 – зберігає нуль f(0000)=0;
K1 – зберігає одиницю f(1111)=1;
КС – не самодвоїста f(0001)=1 f(1110)=1;
КЛ – поліном Жегалкіна не є лінійним;
КМ – не монотонна f(0011)=1 f(0111)=0.
2.3 Мінімізація функції f4
Мінімізація функції методом невизначених коефіцієнтів
Суть методу полягає в знаходженні ненульових коефіцієнтів при кожній імпліканті. Запишемо рівняння для знаходження коефіцієнтів у вигляді таблиці (таб.2.1). Викреслимо рядки, де функція приймає нульові значення. Викреслимо вже знайдені нульові коефіцієнти в тих рядках таблиці, що залишилися. Не викреслені імпліканти поглинають імпліканти розташовані справа від них.
|
f4
|
X4
|
X3
|
X2
|
X1
|
X4X3
|
X4X2
|
X4X1
|
X3X2
|
X3X1
|
X2X1
|
X4X3X2
|
X4X3X1
|
X4X2X1
|
X3X2X1
|
X4X3X2X1
|
|
0
|
0
|
0
|
0
|
0
|
00
|
00
|
00
|
00
|
00
|
00
|
000
|
000
|
000
|
000
|
0000
|
|
1
|
0
|
0
|
0
|
1
|
00
|
00
|
01
|
00
|
01
|
01
|
000
|
001+
|
001
|
001-
|
0001*
|
|
0
|
0
|
0
|
1
|
0
|
00
|
01
|
00
|
01
|
00
|
10
|
001
|
000
|
010
|
010
|
0010
|
|
1
|
0
|
0
|
1
|
1
|
00
|
01
|
01
|
01
|
01
|
11
|
001
|
001+
|
011
|
011
|
0011*
|
|
0
|
0
|
1
|
0
|
0
|
01
|
00
|
00
|
10
|
10
|
00
|
010
|
010
|
000
|
100
|
0100
|
|
0
|
0
|
1
|
0
|
1
|
01
|
00
|
01
|
10
|
11
|
01
|
010
|
011
|
001
|
101
|
0101
|
|
0
|
0
|
1
|
1
|
0
|
01
|
01
|
00
|
11
|
10
|
10
|
011
|
010
|
010
|
110
|
0110
|
|
0
|
0
|
1
|
1
|
1
|
01
|
01
|
01
|
11
|
11
|
11
|
011
|
011
|
011
|
111
|
0111
|
|
1
|
1
|
0
|
0
|
0
|
10
|
10
|
10
|
00
|
00
|
00
|
100-
|
100+
|
100+
|
000
|
1000*
|
|
1
|
1
|
0
|
0
|
1
|
10
|
10
|
11
|
00
|
01
|
01
|
100-
|
101
|
101
|
001-
|
1001*
|
|
1
|
1
|
0
|
1
|
0
|
10
|
11
|
10
|
01
|
00
|
10
|
101
|
100+
|
110
|
010
|
1010*
|
|
0
|
1
|
0
|
1
|
1
|
10
|
11
|
11
|
01
|
01
|
11
|
101
|
101
|
111
|
011
|
1011
|
|
1
|
1
|
1
|
0
|
0
|
11
|
10
|
10
|
10
|
10
|
00
|
110
|
110
|
100+
|
100
|
1100*
|
|
0
|
1
|
1
|
0
|
1
|
11
|
10
|
11
|
10
|
11
|
01
|
110
|
111
|
101
|
101
|
1101
|
|
0
|
1
|
1
|
1
|
0
|
11
|
11
|
10
|
11
|
10
|
10
|
111
|
110
|
110
|
110
|
1110
|
|
1
|
1
|
1
|
1
|
1
|
11
|
11
|
11
|
11
|
11
|
11
|
111
|
111
|
111
|
111
|
1111+
|
Таб.2.2 Мінімізація методом невизначених коефіцієнтів
Ядро
FТДНФ1 =
FТДНФ2 =
FМДНФ = .
Мінімізація методом Квайна-Мак-Класкі
Виходячи з таблиці істинності запишемо стовпчик ДДНФ, розподіливши терми за кількістю одиниць. Проведемо попарне склеювання між сусідніми групами.
К0:
К1:
0001
1000
0011
1001
1010
1100
1111�
00X1
X001
100X
10X0
1X00
Подальше склеювання не можливе. Виконаємо поглинання термів:
К0: К1:
0001
1000
0011
1001
1010
1100
1111+�
00X1+
X001+
100X+
10X0+
1X00+
Побудуємо таблицю покриття (таб.2.3):
|
|
0001
|
1000
|
0011
|
1001
|
1010
|
1100
|
1111
|
|
00X1
|
V
|
|
V
|
|
|
|
|
|
X001
|
V
|
|
|
V
|
|
|
|
|
100X
|
|
V
|
|
V
|
|
|
|
|
10X0
|
|
V
|
|
|
V
|
|
|
|
1X00
|
|
V
|
|
|
|
V
|
|
|
1111
|
|
|
|
|
|
|
V
|
Таблиця 2.3 Таблиця покриття
Ядро
FТДНФ1 =
FТДНФ2 =
FМДНФ = .
Мінімізація методом діаграм Вейча
Виконаємо мінімізацію методом діаграм Вейча. Цей метод зручний, коли кількість аргументів функції не перевищує п’яти. Кожна клітинка відповідає одній костітуенті, а об’єднання з декількох клітинок – імпліканті (рис. 2.1):
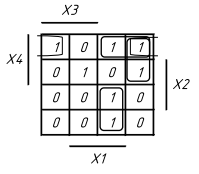
Рисунок 2.1 Діаграма Вейча
FМДНФ =
2.4 Спільна мінімізація системи функцій f1 , f2 , f3
Система перемикальних функцій задана таблицею істинності (таб.2.4):
|
X4
|
X3
|
X2
|
X1
|
F1
|
F2
|
F3
|
F4
|
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
1
|
|
0
|
0
|
1
|
0
|
1
|
1
|
1
|
0
|
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
1
|
|
0
|
1
|
0
|
0
|
|
0
|
1
|
0
|
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
|
0
|
1
|
1
|
0
|
1
|
|
|
0
|
|
0
|
1
|
1
|
1
|
|
|
1
|
0
|
|
1
|
0
|
0
|
0
|
1
|
1
|
1
|
1
|
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
|
1
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
|
1
|
1
|
0
|
0
|
1
|
|
1
|
1
|
|
1
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
|
1
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
Таблиця 2.4 Таблиця істинності системи функцій
Щоб одержати схему з мінімальними параметрами, необхідно виконати сумісну мінімізацію системи функцій.
Виконаємо мінімізацію системи функцій f1 , f2 , f3 методом Квайна-Мак-Класкі. Цей метод базується на співвідношеннях неповного склеювання та поглинання. Особливістю методу є використання цифрової форми запису термів перемикальних функцій. У цьому випадку зменшується кількість символів для подання термів і кількість операцій у процесі мінімізації, що робить метод зручним для програмної реалізації.
К0:
0000 (1,2,3)+
0001 (1,2) +
0010 (1,2,3) +
0100 (1*,3)
1000 (1,2,3) +
0110 (1,2*,3*)+
1001 (3) +
1100 (1,2*,3)+
0111 (1*,2*,3) +
1111 (1,2,3) +�К1:
000X (1,2) +
00X0 (1,2,3) +
0X00 (1*,3)
X000 (1,2,3) +
0X10 (1,2,3) +
01X0 (1,3)
X100 (1,3)
100X (3) +
1X00 (1,2,3) +
011X (1,2,3) +
X111 (1,2,3) +�К2:
OXXO (1,3)
0XX0 (1,3) +
XX00 (1,3)
XX00 (1,3) +
Побудуємо таблицю покриття (таб.2.5):
|
|
y1
|
y2
|
y3
|
|
|
0000
|
0001
|
0010
|
1000
|
0110
|
1100
|
1111
|
0000
|
0001
|
0010
|
1000
|
1111
|
0000
|
0010
|
0100
|
1000
|
1001
|
1100
|
0111
|
1111
|
|
0000
|
1,2,3
|
v
|
|
|
|
|
|
|
v
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
0001
|
1,2
|
|
v
|
|
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
1000
|
1,2,3
|
|
|
|
v
|
|
|
|
|
|
|
v
|
|
|
|
|
v
|
|
|
|
|
|
0110
|
1
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1001
|
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
|
|
|
|
1100
|
1,3
|
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
|
|
v
|
|
|
|
0111
|
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
|
|
1111
|
1,2,3
|
|
|
|
|
|
|
v
|
|
|
|
|
v
|
|
|
|
|
|
|
|
v
|
|
000x
|
1,2
|
v
|
v
|
|
|
|
|
|
v
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
00x0
|
1,2,3
|
v
|
|
v
|
|
|
|
|
|
|
v
|
|
|
v
|
v
|
|
|
|
|
|
|
|
x000
|
1,2,3
|
v
|
|
|
v
|
|
|
|
v
|
|
|
v
|
|
v
|
|
|
v
|
|
|
|
|
|
0x10
|
1,2,3
|
|
|
v
|
|
v
|
|
|
|
|
v
|
|
|
|
v
|
|
|
|
|
|
|
|
100x
|
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
v
|
|
|
|
|
1x00
|
1,2,3
|
|
|
|
v
|
|
v
|
|
|
|
|
v
|
|
|
|
|
v
|
|
v
|
|
|
|
011x
|
1,2,3
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
|
|
x111
|
1,2,3
|
|
|
|
|
|
|
v
|
|
|
|
|
v
|
|
|
|
|
|
|
v
|
v
|
|
0xx0
|
1,3
|
v
|
|
v
|
|
v
|
|
|
|
|
|
|
|
v
|
v
|
v
|
|
|
|
|
|
|
xx00
|
1,3
|
v
|
|
|
v
|
|
v
|
|
|
|
|
|
|
v
|
|
v
|
v
|
|
v
|
|
|
Таблиця 2.5 Таблиця покриття
Визначимо кожну з функцій (базис І, АБО):
f1 =
f2 =
f3 =
Представимо функції у базисі І-НЕ/І-НЕ:
f1 =
f2 =
f3 =
Представимо функції у базисі АБО/І-НЕ:
f1 =
f2 =
f3 =
Представимо функції у базисі АБО-НЕ/АБО:
f1 =
f2 =
f3 =
Виконаємо мінімізацію системи перемикальних функцій заданих таблицею істинності методом Квайна-Мак-Класкі по нулям.
К0 :
0001 (3)
0100 (1*,2)
0011 (1,2,3)
0101 (1,2,3)
0110 (2*,3*)
1001 (1,2)
1010 (1,2,3)
1100 (2*)
0111(1*,2*)
1011 (1,2,3)
1101 (1,2,3)
1110 (1,2,3) K1 :
00X1 (3) +
0X01 (3) +
010X (1,2) +
01X0 (2)
X100 (2) +
0X11 (1,2) +
X011 (1,2,3) +
01X1 (1,2) +
X101 (1,2,3) +
011X (2*)
X110 (2,3) +
10X1 (1,2) +
1X01 (1,2) +
101X (1,2,3) +
1X10 (1,2,3) +
110X (2)
11X0 (2) K2 :
01XX (2)
X10X (2)
01XX (2) +
X1X0 (2)
X10X (2) +
X1X0 (2) +
Будуємо таблицю покриття (табл. 2.6):
|
|
y1
|
y2
|
y3
|
|
|
0011
|
0101
|
1001
|
1010
|
1011
|
1101
|
1110
|
0011
|
0100
|
0101
|
1001
|
1010
|
1011
|
1101
|
1110
|
0001
|
0011
|
0101
|
1010
|
1011
|
1101
|
1110
|
|
00x1
|
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
v
|
|
|
|
|
|
|
0x01
|
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
|
v
|
|
|
|
|
|
010x
|
1,2
|
|
v
|
|
|
|
|
|
|
v
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0x11
|
1,2
|
v
|
|
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x011
|
1,2,3
|
v
|
|
|
|
v
|
|
|
v
|
|
|
|
|
v
|
|
|
|
v
|
|
|
v
|
|
|
|
01x1
|
1,2
|
|
v
|
|
|
|
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x101
|
1,2,3
|
|
v
|
|
|
|
v
|
|
|
|
v
|
|
|
|
v
|
|
|
|
v
|
|
|
v
|
|
|
x110
|
2,3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v
|
|
|
|
|
|
|
v
|
|
10x1
|
1,2
|
|
|
v
|
|
v
|
|
|
|
|
|
v
|
|
v
|
|
|
|
|
|
|
|
|
|
|
1x01
|
1,2
|
|
|
v
|
|
|
v
|
|
|
|
|
v
|
|
|
v
|
|
|
|
|
|
|
|
|
|
101x
|
1,2,3
|
|
|
|
v
|
v
|
|
|
|
|
|
|
v
|
v
|
|
|
|
|
|
v
|
v
|
|
|
|
1x10
|
1,2,3
|
|
|
|
v
|
|
|
v
|
|
|
|
|
v
|
|
|
v
|
|
|
|
v
|
|
|
v
|
|
01xx
|
2
|
|
|
|
|
|
|
|
|
v
|
v
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x10x
|
2
|
|
|
|
|
|
|
|
|
v
|
v
|
|
|
|
v
|
|
|
|
|
|
|
|
|
|
x1x0
|
2
|
|
|
|
|
|
|
|
|
v
|
|
|
|
|
|
v
|
|
|
|
|
|
|
|
Таблиця 2.6 Таблиця покриття
Визначимо кожну з функцій (базис І/АБО-НЕ):

Представимо функції у базисі І-НЕ/І:

Представимо функції у базисі АБО/І:

Представимо функції у базисі АБО-НЕ/АБО-НЕ:


2.5 Одержання операторного представлення функцій на ПЛМ
Для програмування ПЛМ використовують нормальні форми І/АБО
та І/АБО-НЕ. Розглянемо програмування ПЛМ для реалізації системи перемикальних функцій, що подані в нормальній формі І/АБО:
f1 =
f2 =
f3 =
Зробимо заміну позначень термів системи:
Р1 Р2 Р3 Р4 Р5
Р6 Р7
Тоді функції виходів описуються системою:
f1 = Р1 Р2 Р3 Р4
f2 = Р3 Р4 Р5 Р6
f3 = Р1 Р2 Р3 Р7
Визначимо мінімальні параметри ПЛМ:
N = 4 – кількість інформаційних входів, що дорівнює кількості аргументів системи перемикальних функцій.
Р = 7 – число проміжних внутрішніх шин, яке дорівнює кількості різних термів системи.
М = 3 – число інформаційних виходів, що дорівнює кількості функцій виходів.
Побудуємо спрощену мнемонічну схему ПЛМ (4,7,3) (рис. 2.2):
Рисунок 2.2 Мнемонічна схема ПЛМ
Складемо карту програмування ПЛМ (4,7,3) (табл.2.7):
|
№ шини
|
Входи
|
Виходи
|
|
|
Х1
|
Х2
|
Х3
|
Х4
|
Y1
|
Y2
|
Y3
|
|
1
|
0
|
-
|
-
|
0
|
1
|
-
|
1
|
|
2
|
0
|
0
|
-
|
-
|
1
|
-
|
1
|
|
3
|
1
|
1
|
1
|
-
|
1
|
1
|
1
|
|
4
|
-
|
0
|
0
|
0
|
1
|
1
|
-
|
|
5
|
0
|
0
|
0
|
-
|
-
|
1
|
-
|
|
6
|
0
|
-
|
0
|
0
|
-
|
1
|
-
|
|
7
|
-
|
0
|
0
|
1
|
-
|
-
|
1
|
Таблиця 2.7 Карта програмування ПЛМ
Висновок
Згідно з завданням даної курсової роботи необхідно було за номером залікової книжки, переведеним в двійкову систему числення, побудувати
блок-схему автомата, визначити тип автомата, типи використовуваних тригерів, набір логічних елементів, сигнал з подвійною тривалістю, визначити систему з чотирьох перемикальних функцій. Використовуючи ці дані, треба було провести абстрактний та структурний синтез автомата і побудувати його. Систему з перших трьох перемикальних функцій із заданої таблиці необхідно було мінімізувати і отримати операторні представлення для реалізації системи на програмованих логічних матрицях.
Для виконання завдання були розкодовані вихідні таблиці завдання варіанта. При побудові автомата була проведена побудова графа з урахуванням сигналів подвійної тривалості, зашифровані стани автомата, побудована структурна схема автомата, мінімізована система з функцій виходів і функцій збудження тригерів, був побудований і відлагоджений автомат. При виконанні другої частини роботи: мінімізована функція f4 різними методами, f4 �представлена в канонічних формах алгебр Буля, Жегалкіна, Пірса і Шеффера, а також проведена сумісна мінімізація системи функцій з наступною реалізацією на програмованих логічних матрицях.
Список літератури
Жабин В.И., Жуков И.А., Клименко И.А., Ткаченко В.В.. Прикладная теория цифровых автоматов. - К.: Книжное издательство НАУ, 2011. - 364 с.
ДОДАТОК
Вхідні дані
Варіант завдання визначається дев’ятьма молодшими розрядами залікової книжки представлений у двійковій системі числення.
Запишемо дані у таблиці:
Таблиця 2.1
|
h9
|
h8
|
h7
|
h6
|
h5
|
h4
|
h3
|
h2
|
h1
|
|
0
|
1
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
Таблиця 2.2
|
h8
|
h4
|
h2
|
Порядок з’єднання фрагментів
|
|
1
|
1
|
0
|
4, 1, 2
|
Таблиця 2.3
|
h8
|
h7
|
h3
|
Логічні умови
|
|
1
|
1
|
0
|
not X2, X2, X1
|
Таблиця 2.4
|
h9
|
h4
|
h1
|
Послідовність сигналів
|
|
0
|
1
|
0
|
(Y1 Y2), (Y4 Y5), Y2, Y3, (Y1 Y3), Y3
|
Таблиця 2.5
|
h6
|
h2
|
Сигнал тривалістю 2t
|
|
0
|
1
|
Y1
|
Таблиця 2.6
|
h6
|
h5
|
Тип триггера
|
|
0
|
0
|
RS
|
Таблиця 2.7
|
h3
|
h2
|
h1
|
Логічні елементи
|
|
0
|
0
|
0
|
3 І-НЕ, 2 I
|
|
h4
|
Тип автомата
|
|
1
|
Мура
|
Таблиця 2.8
|
X4
|
X3
|
X2
|
X1
|
F1
|
F2
|
F3
|
F4
|
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
1
|
|
0
|
0
|
1
|
0
|
1
|
1
|
1
|
0
|
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
1
|
|
0
|
1
|
0
|
0
|
|
0
|
1
|
0
|
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
|
0
|
1
|
1
|
0
|
1
|
|
|
0
|
|
0
|
1
|
1
|
1
|
|
|
1
|
0
|
|
1
|
0
|
0
|
0
|
1
|
1
|
1
|
1
|
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
|
1
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
|
1
|
1
|
0
|
0
|
1
|
|
1
|
1
|
|
1
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
|
1
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
Таблиця істинності функцій:
Таблиця 2.9
Необхідно виконати сумісну мінімізацію функцій f1, f2 ,f3. Отримати операторні представлення для реалізації системи функцій на програмувальних логічних матрицях.
Функцію f4 необхідно представити в канонічних формах алгебри Буля, Жегалкіна, Пірса та Шеффера. Визначити приналежність даної функції до п’яти перед повних класів. Виконати мінімізацію функції методами:
- Невизначених коефіцієнтів;
- Квайна (Квайна-Мак-Класкі);
- Діаграм Вейча.
Склад пристроїв
Керуючий автомат.
Керуючий автомат складається з комбінаційної схеми і пам’яті на тригерах. Тип тригерів і елементний базис задані в технічному завданні.
Програмувальна логічна матриця.
ПЛМ складається із двох (кон’юктивної і диз’юнктивної ) матриць, де виходи першої приєднуються на входи другої і дозволяють реалізувати комбінаційні схеми в базисі {І/АБО, І/АБО-НЕ}.
Зм.ю.
Арк.
№ докум.
Пiдп.
Дата
Розроб.
Перевiр.
Н. контр.
Затв.
Селіверстов Д.О.
Лiт.
Аркуш
Аркушiв
ІАЛЦ.463626.004 П3
Пристрій управляючий
Пояснювальна записка
НТУУ “КПІ” ФІОТ
Гр. ІО-12
112
1
4
Зм.
рк.
№ докум.
Підп.
Дата
Арк.
2
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
2
ІАЛЦ.463626.002 ТЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
3
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
4
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
5
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
6
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
7
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
8
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
9
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
10
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
11
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
12
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
13
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
14
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
15
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
16
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
17
ІАЛЦ.463626.004 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
18
ІАЛЦ.463626.04 ПЗ
Зм.
Арк.
№ докум.
Підп.
Дата
Арк.
3
ІАЛЦ.463626.002 ТЗ
Розробка керуючого автомата і синтез комбінаційних схем