МАГНИТНЫЕ ДАТЧИКИ И ПРИБОРЫ КУРСОВЫХ СИСТЕМ
ГЛАВА 14.МАГНИТНЫЕ ДАТЧИКИ И ПРИБОРЫ КУРСОВЫХ СИСТЕМ
Содержание
стр.
- Общие сведения о курсе летательного аппарата……..…………2
- Магнитное поле Земли…………………………………….………4
- Магнитные компасы… …………………………….…………..…7
- Девиации и погрешности магнитных компасов……………… .13
- Индукционные компасы………………….…………………….…22
Контрольные вопросы………………………..……………………..33
1.Общие сведения о курсе летательного аппарата
Курсом летательного аппарата называется угол между пло скостью географического меридиана и проекций продольной оси летательного аппарата на горизонтальную плоскость. Курс от считывается по часовой стрелке от направления на север. Изме ряется курс в градусах и может прини мать значения от 0 до 360°.
Приборы, предназначенные для изме рения курса летательного аппарата, на зываются компасами.
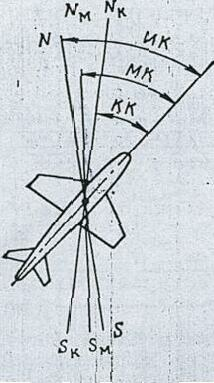
Рис.1. Истинный, магнитный, и компасный курсы самолета
Различают истинный, магнитный и компасный курсы в зависимости от вида меридиана, принятого за начало отсчета (рис.1).
Истинным курсом называется угол ИК, отсчитываемый от географического меридиана. Обычно магнитная стрелка, свободная от влияния посторонних маг нитных полей, устанавливается не по
географическому, а по так называемому магнитному меридиану. Угол МК, отсчи тываемый от магнитного меридиана, на зывается магнитным курсом. При изме рении курса компасом, например, маг нитным, показания будут отличаться от истинного и магнитного курсов вследст вие погрешностей, свойственных прибору. Угол КК, измеряемый компасом, называется компасным курсом.
Определение курса осуществляется магнитными, индукцион ными, астрономическими, гироскопическими и радиотехническими методами. Магнитный метод измерения курса основан на опреде лении направления магнитного поля Земли. Для измерения кур са магнитным методом применяются магнитные компасы, обладающие простотой устройства и надежностью. Магнитному методу измерения курса свойственны недостатки и ограничения, которые сводятся к следующему: этот метод дает большие по грешности в районах магнитных аномалий, во время магнитных бурь, в высоких широтах (выше 80°), а также в условиях боль ших девиаций на борту летательного аппарата.
Большие недостатки магнитного метода способствовали по явлению других методов измерения курса, в частности, и индукционного метода. В этом методе также используются свой ства магнитного поля Земли, однако напряженность поля воз действует не на магнитную стрелку, а на, магнитное сопротив ление индукционного элемента питаемого переменным током. В индукционном методе устраняется часть недостатков, свойст венных магнитному методу, однако влияние магнитных бурь и магнитных аномалий по-прежнему имеет место. Помимо рассмотренного существуют другие способы определения курса ЛА.
Астрономический способ основан на пеленгации не бесных светил (Солнца, Луны, звезд) и определении по этим данным курса летательного аппарата. При видимости небесных светил астрономические компасы дают точные и надежные по казания в любой точке земного шара.
Большое значение в авиации имеет гироскопический метод определения курса, основанный на использовании по зиционных гироскопов. Этот метод в сочетании с другими упо мянутыми методами является одним из основных.
Радиотехнический метод измерения курса основав на измерении углов между направлением на радиостанцию и продольной осью летательного аппарата.
Рассмотрим компасы, основанные на магнит ном, индукционном методах измерения курса.
Курс летательного аппарата должен измеряться с высокой точностью. Так, при ручном пилотировании по компасу с целью вывода ЛА в заданную точку курс должен быть известен с по грешностью, не превышающей ±30’. При применении компасов в качестве датчиков курса в навигационных системах и системах управления полетом погрешности не должны превышать ±15/. Применяемые в настоящее время компасы не полностью удов летворяют этим требованиям и их погрешности нередко превы шают ±1°.
2. Магнитное поле земли
Земной шар является естественным магнитом. Его магнитные полюсы расположены вблизи географических полюсов: северный магнитный полюс находится в точке 70° северной широты и 95° западной долготы, а южный магнитный полюс 72,50 южной широты и 154° восточной долготы.
Напряженность магнитного поля Земли характеризуется век тором Т, который является функцией координат и времени. Век тор напряженности Т обычно раскладывается на две составляю щие—горизонтальную Н и вертикальную Z, (рис.2). Угол , составленный вектором Т и горизонтальной плоскостью, назы вается углом наклонения или просто наклонением. Горизонтальная и вертикальная составляющие век тора напряженности, выраженные через угол на клонения , имеют вид:
H=Tcos; Z=Tsin
На магнитном экваторе угол наклонения равен нулю. При движении от магнитного экватора к магнитным полюсам угол наклонения возрастает и, например, в районе Москвы 65°. В районе маг нитных полюсов угол наклонения приближается к 90°, а горизонтальная составляющая H стремится к нулю.
Рис.2. Горизон тальная и вертикаль ная составляющие магнитного поля земли
Рис.3. Маг нитное склоне ние
Если взять магнитную стрелку с точечной опорой в середи не между полюсами, то она будет устанавливаться по направле нию горизонтальной составляющей H по линии север—юг, при этом в северном полушарии вертикальная составляющая Z будет наклонять северный конец стрелки концом вниз. Очевидно, в южном полушарии вертикальная составляющая Z будет накло нять южный конец вниз. Для компенсации этих наклонов при полетах в северном полушарии южный конец стрелки делают более тяжелым. В южном полушарии следует утяжелять се верный конец стрелки.
Горизонтальная составляющая вектора напряженности Н не совпадает с направлением географического меридиана. На правление составляющей Н называется магнитным меридианом данного места. Угол между магнитным и географическим ме ридианами называется углом склонения или просто склонением. Склонение считается положительным, если магнитная стрелка отклоняется северным концом к востоку от географического ме ридиана (рис.3), и отрицательным, если стрелка отклонена к западу.
Величины склонений нанесены на специальные карты магнитных склонений и учитываются при пользовании магнитными компасами. Поскольку магнитные склонения различны по вели чине и по знаку в разных точках земной поверхности, то для их учета при определении курса необходимо знать местоположение летательного аппарата.
Для целей определения курса существенны не столько вели чина вектора Н, сколько его направление, оцениваемое склоне нием. Приводимые на картах величины склонений являются средними величинами и представляют собой математические ожидания сложных случайных процессов, происходящих в маг нитном поле Земли. Для более полной оценки процессов, помимо математического ожидания, необходимо задать дисперсию 2 (t) вариаций направления вектора H, учитывающую суточные и годовые вариации, а также вариации, характерные для маг нитных бурь. Появление магнитных бурь обычно связывают с солнечной активностью.
3. Магнитные компасы
Принцип действия магнитного компаса основан на свойстве магнитной стрелки устанавливаться по направлению магнитных силовых линий поля Земли. Магнитный компас измеряет маг нитный курс (МК), т. е. угол между направлением горизонталь ной составляющей магнитного поля Земли и проекций продоль ной оси летательного аппарата на горизонтальную плоскость.
Основными элементами маг нитного компаса являются (рис.4): подвижная система (картушка), включающая магниты 3, поплавок 2, лимб 1 (шкалу) и шпильку 10; котелок 5 с жидко стью 6; колонка 7 с подпятником 9. Лимб картушки разградуирован на 360°. Вес картушки благодаря поплавку 2 ,уменьшен настолько, что давление шпильки 10 на подпятник 9 незначительно, что способствует уменьшению трения.

Рис.4. Схема магнитного компаса:
1—лимб картушки; 2—поплавок; 3— магниты; 4—стекло; 5—котелок;6— жидкость; 7—колонка; в—уводящая камера; 9— подпятник; 10—шпилька;11—курсовая черта.
К поплавку прикрепляется одна или несколько пар по стоянных магнитов, направленных одноименными полюсами в одну сторону. Оси магнитов параллельны линии 0—180° лимба. Мембранная коробка в нижней части котелка служит для ком пенсации изменения объема жидкости при изменении темпера туры. В качестве жидкости используется лигроин.
Картушка компаса, будучи выведенной из состояния покоя, совершает колебания. Для оценки этих колебаний составим уравнение движения картушки. На картушку действуют момент инерционных сил J , момент сил вязкого сопротивления k, уста навливающий момент от взаимодействия постоянных магнитов с магнитным полем Земли MH*sin(), момент сухого трения шпильки о подпятник Мтр и возмущающий момент Мм, вызван ный влиянием посторонних магнитных полей. Сумма этих момен тов равна нулю или
J + k + MH*sin()=Мм Мтр (1)
где J— момент инерции картушек;
k—коэффициент демпфирования;
M=2ml—магнитный момент картушки (m—магнитная масса полюсов, 2l—расстояние между полюсами);
—угол отклонения картушки
—курс летательного аппарата.
Для небольших углов отклонения ()<30можно
принять sin()=/
Тогда уравнение (1) примет вид
+2d+ (), (2)
где собственная частота незатухающих колебаний компаса;
относительный коэффициент затухания;
погрешность магнитного компаса, обусловленная влиянием посторонних магнитных полей.
Если даже отсутствуют все другие погрешности магнитного компаса, то наличие момента трения Мтр обусловливает застой компаса, величина которого
(3)
Для уменьшения застоя необходимо уменьшать трение шпильки о подпятник и увеличивать магнитный момент М по стоянных магнитов. Уменьшение трения достигается увеличени ем плавучести картушки и выбором в качестве подпятника твер дого камня (агат, рубин, сапфир и, др.). Величина момента тре ния Мтр зависит также от поведения подвижной системы ком паса. При работе компаса на самолете корпус прибора подвер гается колебаниям, которые передаются на подпятник. Колеба ния подпятника способствуют уменьшению момента трения Мтр, поэтому застой компаса на самолете значительно меньше, чем на неподвижном основании. Застой в современных компасах меньше 1°, поэтому при рассмотрении динамических характери стик компаса будем им пренебрегать.
В зависимости от величины относительного коэффициента затухания d движения картушки могут быть затухающими (при d<1) или апериодическими (при d>1). В целях получения ми нимального времени успокоения компаса обычно выбирают
d= 0,7 0,8. Выбор собственной частоты обусловливают тре буемым временем успокоения, причем
(4)
Рис.5. Компас КИ-12