АРХИТЕКТУРА И ЭЛЕМЕНТНАЯ БАЗА ЛОКАЛЬНЫЕ ВЫЧИСЛИТЕЛЬНЫХ СЕТЕЙ ЛА
|
1. |
Организация вычислительных систем современных ЛА………………………………………………………… |
1 |
|
2. |
Организация средств информационного обмена перспективных БВС……………………………………... |
7 |
|
3. |
Принцип построения и элементная база структур с радиальным каналом. Стандарт ARING – 429………… |
14 |
|
4. |
Принцип построения и элементная база структур с мультиплексным каналом. Стандарт MIL STD-1553B.. |
19 |
|
5. |
Логика работы кодера по стандарту MIL-STD 1553B… |
26 |
|
5.1. |
Логика работы кодера…………………………………… |
27 |
|
5.2. |
Логика работы декодера………………………………… |
28 |
|
Заключение………………………………………………. |
29 |
|
|
Контрольные вопросы…………………………………... |
29 |
|
ГЛАВА10. АРХИТЕКТУРА И ЭЛЕМЕНТНАЯ БАЗА ЛОКАЛЬНЫЕ ВЫЧИСЛИТЕЛЬНЫХ СЕТЕЙ ЛА
1.Организация вычислительных систем современных ЛА
Наступившие XXI столетие и третье тысячелетие все настойчивее ставят вопрос: какие летательные аппараты (ЛА) истребительной авиации обеспечат превосходство в воздухе? На поставленный вопрос следует однозначный ответ - ими станут истребители следующего, 5-го поколения, реактивной эры авиации. Провести четкую грань между поколениями ЛА трудно и не всегда возможно. Да и сама смена поколений процесс довольно медленный. Но в итоге всегда наступает момент, когда ни один новый самолет предыдущего поколения не находит сбыта на рынке.
Среди большинства специалистов по самолетостроению распространено мнение: формула главных качеств тактического истребителя 5-го поколения должна выглядеть как "5С" = "стремительность" + "скрытность" + "супервозможности" + "самозащита" + "системность". (указанные составляющие учитывают лишь главные, но далеко не все необходимые новые качества этого истребителя).
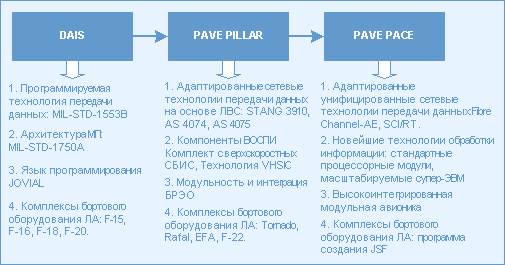
Рис.1. Основные зарубежные научно-технические программы
В числе составляющих этой формулы такие абсолютно необходимые для современного истребителя качества, как всепогодность действий, способность выполнять различные задачи днем и ночью, на фоне земли и т.д., все они стали нормой еще в предыдущих поколениях, в первую очередь, благодаря современным характеристикам информационных датчиков функционального оборудования для различных диапазонов апертур (радиолокационного, оптического).Необходимо отметить, что за рубежом последние 10-20 лет характеризуются завершением крупных научно-технические программ (DAIS, PAVE PILLAR и другие), которые в конечном итоге регламентировали принципы организации территориально-распределенной неоднородной многомашинной бортовой вычислительной системы (БВС) с "фиксированным" распределением реализуемых задач с определенными возможностями к ее реконфигурации на аппаратном уровне (рис. 1). Для объединения элементов многомашинной БВС используются стандартные цифровые соединения на основе специализированных технологий информационного обмена с использованием централизованного или децентрализованного методов доступа (MIL-STD-1553B, STANAG3910, AS4074, AS4075). Основные преимущества, которые обеспечиваются федеративно-централизованной организацией БВС с системной ориентацией, следующие:
Комплект бортового оборудования (КБО) определяется как сложная территориально распределенная система, состоящая из отдельных функциональных подсистем, связанных между собой стандартными информационными соединениями;
- разработка отдельных функциональных подсистем КБО осуществляется большей частью автономно различными фирмами-подрядчиками, а последующее их комплексирование обеспечивает функциональную интеграцию КБО в целом во всех режимах его эксплуатации;
- процесс обработки информации распараллеливается во времени в неоднородных по своей организации и характеристикам вычислительных средствах;
- разрабатываемое программное обеспечение имеет модульную организацию;
- обеспечивается возможность реконфигурации структуры в случае возникновения отказов в вычислительных средствах или функциональном оборудовании КБО;
- обеспечивается возможность модернизации и наращивания числа функциональных подсистем КБО практически без изменения топологии физических соединений на межсистемном (внутриобъектовом уровне).
Последнее положение особенно важно, так как по оценкам зарубежных специалистов в ходе жизненного цикла эксплуатации современного авиационного комплекса часто приходится производить несколько модернизаций его КБО.
Кроме того, в результате выполнения данных программ научных исследований был получен ответ на глобальный вопрос о возможности повышения эффективности и качества функционирования КБО и одновременно при этом, не усложняя его архитектуру, повысить надежность его функционирования, снизить стоимость технического обслуживания. Вместе с тем сохраняется обязательность требований к возможностям модификации и масштабируемости (модульном наращивании) КБО, т.е. добавления в его состав новых подсистем, которые могли бы быть разработаны в будущем, что должно происходить с минимальными затратами.
Искомое решение сформировалось не столько в области повышения технических характеристик, качества и эффективности функционирования отдельных элементов КБО, сколько в области поиска новых концепций и возможных подходов к разработке архитектур КБО для перспективных ЛА, на основе следующих постулатов:
- функциональный анализ подсистем бортового оборудования показал, что может быть сформировано семейство устройств, получивших название унифицированных модулей (common modules), с помощью которых может быть реализовано более 90% программируемых и аппаратных функций КБО, при этом проводится линия их глубокой унификации;
- современный уровень развития электронных технологий позволяет реализовать отдельный общий модуль в виде одной или нескольких СБИС, а вычислительные средства функциональных подсистем могут реализоваться из той или иной совокупности общих модулей; те функции, которые не покрываются семейством общих модулей, реализуются посредством специализированных устройств, но таких специализированных модулей немного;
- программное обеспечение КБО необходимо продолжать строить по модульному принципу из общих и специализированных программных модулей;
- техническое обслуживание организуется на основе сменных блоков LRU (Line Replacable Unit), при этом в качестве единицы "физической" архитектуры был выбран общий унифицированный модуль, который, таким образом, одновременно и является LRU;
- помимо введенных выше различий функциональной и конструктивной архитектур КБО, на системном уровне предлагается также рассматривать еще и информационную архитектуру, а также архитектуру управления.
Архитектурная организации управления современными КБО включает четыре иерархических уровня:
- общесистемный уровень (уровень принятия системного решения летчиком);
- уровень взаимосвязанных функциональных подсистем;
- уровень датчиков и исполнительных органов;
- уровень обработки информации от подвижных авиационных подвешиваемых изделий.
При данном подходе к организации КБО летчик вместо функций "координатора" и "интегратора" взаимодействия различных подсистем реализует функции "системного управления", которые определяют лишь основные цели функционирования всей системы и ограничения, а их реализацию на нижнем уровне осуществляет система управления, основу которой составляет БВС. Управляющая БВС ориентирована на принятие сотен решений исполнительного уровня, возлагая на лётчика принятие лишь самых ответственных, системных решений на уровне КБО в целом.
Регламентируемые концепции информационной архитектуры задают уровни и характер информационных связей (интерфейсов) между общими модулями внутри КБО (внутриобъектовые межсистемные связи). В соответствии с программой PAVE PILLAR в КБО реализуются трехуровневые иерархические информационные соединения:
- высокоскоростные локальные информационные связи между информационными датчиками и модулями специализированных процессоров;
- межмодульный (региональный) интерфейс, обеспечивающий соединения общих модулей между собой в пределах одной функциональной подсистемы или элемента обработки информации БВС;
- межсистемные (глобальные внутриобъектовые) соединения, обеспечивающие взаимные связи в пределах единого КБО.
В соответствии с зарубежными градациями функциональных взаимосвязей в КБО большинство существующих отечественных ЛА в части организации информационных связей могут быть отнесены к периоду до начала внедрения результатов программы DAIS. Зарубежные КБО в соответствии с архитектурой DAIS имеют ряд вышеуказанных преимуществ перед ними в рамках системного комплексирования. Первые КБО отечественных ЛА могут быть отнесены к уровням 10В и 1.42-1.44 архитектуры программы DAIS. Разработка КБО данных ЛА, возможно, будет завершена в ближайшем будущем или же будет осуществляться модернизация изначальных КБО на основе применения новейших принципов организации авионики. Таким образом, данное положение определяет необходимость детальной проработки возможностей применения элементов магистрально-модульной архитектуры БВС на базе стандартного канала по ГОСТ 26765.52-87 со скоростью передачи данных 1 Мбит/c и возможного применения его функционального расширения по ГОСТ Р 50832-95 (скорость передачи данных не менее 20 Мбит/с), которое может быть использовано при модернизации КБО летательных аппаратов МО РФ. Подобная архитектура по сравнению с теми, которые находятся в эксплуатации, бесспорно, имеет ряд преимуществ с точки зрения интеграции борта в целом.
В общем, необходимо отметить, что авиационные БВС современных КБО, находящиеся в эксплуатации, имеют системно-ориентированную детерминированную структурную организацию. Вычислительный ресурс этих БВС регулярно распределен между информационными каналами КБО посредством организации отдельных подсистем, причем перераспределение задач между подсистемами при построении КБО на системном уровне не предусматривается, что не обеспечивают достаточной и гибкой интеграции бортового оборудования. Обычно реализуется лишь дублирование наиболее важных задач, решаемых вычислительными средствами верхнего уровня. Процесс совершенствования характеристик КБО и его БВС не может также постоянно продолжаться посредством наращивания количества используемых неоднородных ЭВМ даже при одновременном совершенствовании их технических характеристик.
Кроме того, невозможна полномасштабная адекватная адаптация функциональных ресурсов БВС к различным ситуационным изменениям внешней обстановки. Настоящее положение объясняется, в частности, исторической, и правомерной для своего времени, ориентацией на применение физических магистральных соединений. При этом возможность программного управления потоками информации (программная коммутация) не полностью реализуется в архитектурах современных распределенных КБО. На рубеже 90-х годов ресурсы подобных БВС оказываются недостаточными в части эффективности организации управления КБО при изменениях внешней обстановки. Для таких БВС характерно нерациональное использование ресурсов СВТ, что, как следствие, приводит к неоправданно высоким габаритно-весовым и энергетическим характеристикам. Их основные качества, принципиально изменившие в свое время подходы к комплексированию бортового оборудования и стимулировавшие развитие цифровой авионики, перестали отвечать постоянно возрастающим требованиям к КБО ЛА.
В настоящее время в рамках новой научно-технической программы PAVE PACE осуществляется продолжение исследований и реализации технических идей, определенных в программе PAVE PILLAR,. Результаты данных исследований являются основой проектирования перспективных КБО ЛА следующего поколения, в том числе и JSF (Joint Strike Fighter). Концепции создания авионики для подобных перспективных ЛА коренным образом будут отличаться от принципов, используемых при разработках современных КБО.
2.Организация средств информационного обмена
перспективных БВС
Особенное внимание в обеспечении вышеуказанных концепций необходимо уделить перспективным средствам информационного обмена (СИО), которые при осуществлении их унификации обеспечат необходимые характеристики и необходимую динамическую модификацию архитектуры БВС в целом. Для передачи, хранения и обработки все возрастающих потоков передаваемых данных архитектурная организация средств информационного обмена должна постоянно развиваться. Например, сигналы от аналоговых датчиков в настоящее время преобразуются в цифровые потоки уже на ранней стадии их обработки, при этом, благодаря повышению частоты квантования удается повысить объем собираемой информации (более 100Мвыборок/с). Таким образом, комплексирование на уровне датчиков обуславливает концентрацию обрабатываемой информации в централизованных, высокопроизводительных процессорах цифровой обработки сигналов. Также все чаще требуется преобразование аналогового видеосигнала в цифровую форму.
Высокая пропускная способность также необходима для обеспечения межпроцессорных соединений. Например, системы с распределенной памятью требуют обеспечения взаимодействия и организации связей с чрезвычайно малыми временными задержками. Процессоры с равнодоступной памятью предполагается применять при реализации параллельных процессорных систем и технологии коммерческих суперкомпьютеров, с помощью которых возможно интенсифицировать вычисления, критические для выполнений задач авионики.
Все эти изменения в характеристиках внешней информационной обстановки влияют на выбор сетевых средств передачи информации для КБО перспективных ЛА. При выборе организации перспективной сетевой магистрали, рассчитанной на эксплуатацию в "жестких" условиях реального времени, необходимо принимать во внимание следующие требования к ее функциональным характеристикам, которые должны обеспечивать:
- соответствие современным коммерческим стандартам общего применения;
- рыночную жизнеспособность и использование коммерческих компонентов;
- нечувствительность в широком диапазоне к длинам соединений при передаче информации, а также отказоустойчивость и ремонтопригодность применяемых топологий физической среды;
- поддержку последовательных и параллельных физических систем связей, реализуемых с малым числом физических контактных соединений;
- поддержку различных топологий физической среды на основе распределенных и централизованных переключательных модулей, электрических и оптических реализации физической среды;
- поддержку специализированных ("жестких") условий эксплуатации системы;
- поддержку высокой технической скорости передачи данных и малого времени задержки;
- парадигмы передачи сообщений сетевого характера и передачи данных в общей распределенной между процессорными модулями памяти;
- масштабируемость и наращиваемость вычислительных характеристик в системах;
- поддержку функционирования в режиме реального времени;
- формирования изохронных видеоизображений;
- низкую стоимость/эффективность масштабируемых вычислительных средств в широком смысле слова.
Соответствие международным стандартам гарантирует совместную взаимозаменяемость изделий, поступающих от различных производителей. Кроме того, обеспечивается переносимость систем и снижается риск необходимости использования уникальных реализаций. При этом соответствие международным стандартам может потерять всякий смысл, если коммерческий стандарт не поддерживается техническими реализациями достаточного числа разработчиков.
Широкое применение адаптированных коммерческих стандартов на интерфейсы, в противоположность использованию узкоспециализированных, военных, обеспечивает дополнительные выгоды при снижении стоимости благодаря большому количеству разработок на рынке вычислительных средств. Сроки проектирования системы, ее модернизации и комплексирования, а также общая стоимость СИО могут быть значительно уменьшены. Модернизация системы может быть выполнена посредством приращений функциональных характеристик и без потребности коренного реконструирования системы в целом.
Организация последовательных или параллельных связей, использующих небольшое число контактов объединительной панели, необходима для того, чтобы уменьшить насыщенность (степень интеграции) и, тем самым, уязвимость системы по отношению к отказам контактов в соединениях. Одновременное применение электрических и оптических физических связей необходима для поддержки всего диапазона требований, которым должны отвечать связи унифицированных систем передачи данных. Электрические реализации являются самыми дешевыми (в настоящий момент времени) и более всего подходят для межмодульных связей внутри крейта. Оптические связи устойчивы к электромагнитному излучению и могут реализовать "длинные" связи (порядка единиц км). Длинные соединения типа "крейт-крейт" и "датчик-крейт" желательно реализовать в виде оптических последовательных соединений.
Повышение скорости передачи данных обуславливает необходимость отказа от единого физического моноканала и переход к использованию локальных физических связей типа "точка-точка", а также повсеместного использования синхронных принципов передачи данных для обеспечения минимальных временных задержек и оптимальных параметров передаваемых сигналов в среде (рис.2).
Общее требование к отказоустойчивости связей заключается в том, что отказы соединений должны иметь высокую вероятность обнаружения и локализации, при этом никакой единичный отказ не должен отключать целое соединение (в некоторых случаях может быть недопустимо потерять целую секцию соединений). В общем случае, это требует введения избыточных связей и некоторой организации парирования отказов. Сетевая магистраль с перспективной организацией передачи данных должна поддерживать простые процедуры изменения состава объединяемых функциональных узлов посредством их подключения или отключения. Учитывая условия эксплуатации авиационных и подвижных систем, сетевая магистраль должна надежно работать в требуемых диапазонах рабочих температур и механических нагрузок.
Масштабируемость связей (возможность гибкого изменения топологии) необходима для реализации многочисленных дополнительных функций, которые могут появиться по прошествии значительного периода времени (тридцать лет или более) эксплуатации КБО ЛА. Это также необходимо для возможности применения новых компонентов, созданных на основе более новых высокопроизводительных технологий, которые будут несомненно разработаны в течение периода эксплуатации. Масштабируемый протокол связей должен обеспечивать возможность подключения и обслуживания систем с невысокими информационными характеристиками. В случае возрастания требований к пропускной способности с их стороны необходимо также одновременно поддерживать обслуживание информационно емких систем.
Одни типы связей, используемые для соединений в системах с распределенной памятью, должны обеспечивать скорости передачи данных на уровне нескольких Гбит/с для перспективных технологий процессоров. Другие же типы связи, используемые для соединений в сетях обработки видеосигналов, должны обеспечивать величину скорости передачи меньше 1Гбит/с. Таким образом, унифицированная сеть должна эффективно поддерживать изменения требований к скорости передачи данных.
Сетевая магистраль также должна передавать данные с небольшими задержками для обеспечения предсказуемости откликов, что необходимо в режиме реального времени систем военного применения. Для формирования изображений в реальном масштабе времени перспективная сетевая магистраль должна обеспечивать малые задержки и при "жестких" ограничениях на максимально допустимое время передачи данных. Малые задержки необходимы как в системах с распределенной памятью, так и в системах передачи сообщений, которые используют одну и ту же сеть для потоков информации контроля, и управления, а также потока данных как того требует унифицированный протокол связей.
Рис. 2. Реализация модульной открытой архитектуры в соответствии с программой NGCR на межмодульном и межстоечном уровнях
В системах передачи сообщений большое время задержки в связях часто приводит к очень низкой эффективности функционирования параллельных процессоров. Эксперименты, проводимые при использовании передачи сообщений в коммерческих параллельных системах процессоров, доказали, что даже умеренная величина задержки в связях может иметь разрушительный эффект для эффективного функционирования высокоскоростных процессоров.
Обеспечение режима реального времени (предсказуемость функционирования во времени) необходимо для того, чтобы обеспечить своевременную доставку высокоприоритетных команд и данных управления в случае их смешения в едином потоке с большими трафиками низкоприоритетных сообщений. Это может быть выполнено с помощью следующих подходов:
- применения уникальных топологий связей (например, использования централизованных или распределенных переключателей);
- выбора физической топологии и характеристик, обеспечивающих малую суммарную информационную загруженность СИО;
- различных способов планирования (дисциплин обслуживания) передачи данных.
Понятие эффективности/стоимости может быть более широким и подразумевает намного больше, чем просто стоимость соединений. Данное понятие включает возможность:
- предотвращения значительного увеличения стоимости при изменении характеристик будущих модификаций вычислительных средств;
- предотвращения увеличения стоимости путем поддержки парадигмы универсальности программирования, которая предполагает возможность сдерживания роста стоимости на множестве архитектур КБО путем устранения избыточных аппаратно-программных средств сопряжения;
- устранения переходных интерфейсных модулей в виде мостов и шлюзов.
Таким образом, возникает проблема выбора перспективной организации обмена в качестве единой унифицированной сети межсоединений бортовой авионики.
Анализ широкого спектра сетевых архитектур информационного обмена в качестве перспективных кандидатов на различные применения позволяет сделать следующие выводы. Глобальные (WАN Wide Агеа Network) и городские (МАN Меtrоpоlian Агеа Network) сети рассчитаны на большие расстояния, чем это требуется для организации бортовых систем. Шины уровней объединительной панели или ввода/вывода также не могут быть использованы, поскольку предназначены для реализации систем с сильно связанными компонентами, расположенными в непосредственной близости друг от друга. Таким образом, наилучшими кандидатами на роль перспективной сетевой магистрали остаются архитектуры передачи данных, используемые в локальных сетях. А наиболее перспективной базовой информационной технологией передачи данных, на основе которой могут быть реализованы единые унифицированные сетевые соединения перспективной авионики является "волоконный канал" Fibrе Сhаnnеl (FC). Таким образом, в случае, если все (большинство) бортовых передатчиков/приемников информации в авионики перспективных ЛА будут объединены единой информационной сетью, то она должна обладать следующими характеристиками:
- эффективной рыночной стоимостью и коммерческой жизнеспособностью;
- возможностью применения различных топологий физической среды;
- такими функциональными параметрами, как:
масштабируемая техническая скорость передачи не менее 1 Гбит/с на узел;
малая величина задержки доступа к среде (менее 1 мкс);
небольшой формат заголовка для наиболее часто используемых типов трансакций;
одинаковая эффективность передачи коротких и длинных по размеру сообщений;
малая величина разрядной ошибки (Рош = 10-12 ош/бит);
небольшой формат синхропреамбулы при использовании принципов асинхронной передачи данных;
применение различных дисциплин обслуживания при передачи данных;
- поддержкой таких физических и экономических характеристик устройств, как:
мультипортовый физический интерфейс (2 и более портов на устройство);
низкий уровень потребляемой мощности (23 Вт);
небольшие геометрические размеры (менее 3 дюйм2 );
низкая стоимость аппаратных средств (менее $100);
- технологическая адаптивность к:
будущим поколениям процессорных технологий;
будущим поколениям технологий физической среды передачи информации;
будущим достижениям в технологии создания интегральных схем;
- возможность передачи информации всех типов (командной, управляющей, тестовой, технического обслуживания, информации от датчиков, видеоинформации).
3. Принцип построения и элементная база структур с
радиальным каналом. Стандарт ARINС – 429
Каналы последовательного кода (ПК) по АRINC-429 используются для передачи цифровых данных между элементами систем авиационной электроники. На бортах летательных аппаратов, гражданских и военных, до 75% цифрового межсистемного обмена приходится на каналы интерфейса ARINC-429, таким образом, этот интерфейс является основным «интеллектуальным» связующим звеном в системах авиаэлектроники.
С введением новых систем и аппаратов функции каналов ARINC-429 частично передаются на мультиплексные каналы на основе стандарта МIL-STD-1553B (ГОСТ 26765.52-87), но и на долю каналов ARINC-429 работы хватит еще на добрый десяток лет.
Стандарт АRINC-429 и его отечественные аналоги ГОСТ18977-79 и РТМ 1495-75 описывают вид, параметры сигналов, структуру кодов и протоколы сообщений.
В основу интерфейса заложен вид биполярного двухфазного сигнала (в специальной литературе описывается как RZ-код), передаваемого по бифилярной экранированной линии связи. Передача осуществляется на стандартизованных частотах (период-Т), 32-х разрядными словами ПК, включающими адресную и информационную части, и 32-й разряд - бит контроля по четности (Sum). Слова разделяются обязательной «паузой» - отсутствием сигнала в линии в течение 4-40Т, которая определяет окончание слова ПК (см. рис. 3).
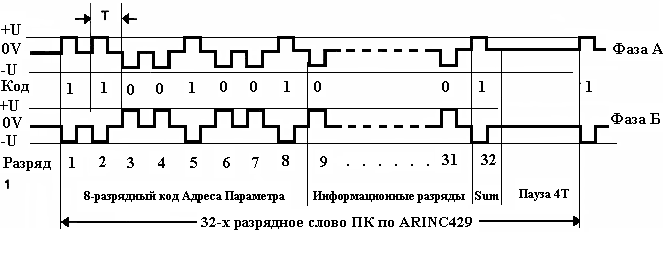
Рис.3. Вид сигналов и структура слова последовательного кода по
ARINC – 429
Биполярный сигнал RZ (рис. 3) обладает лучшими, по сравнению с униполярным RZ-кодом, энергетическими характеристиками. Единица представлена положительным уровнем напряжения, нуль—отрицательным. Средняя мощность равна A2/4R, т. е. половине средней мощности униполярного сигнала, хотя перепад уровней тот же самый. Код имеет два недостатка:
Ретрансляторы и приемники способны надежно восстановить синхронизирующую временную сетку только тогда, когда паузы между импульсами не слишком велики. Появление очередного импульса после незначительной паузы позволяет каждый раз корректировать «ход часов» ретранслятора или приемника. С увеличением паузы надежность «службы времени» этих устройств падает. Например, после передачи серии из 10 тыс. нулей приемник не сможет точно определить, находится ли последующая единица на позиции 9999, 10000 или 10001. Другими словами, при передаче достаточно большой последовательности нулей приемник (или ретранслятор) теряет синхронизацию с передатчиком (или ретранслятором).
Отсутствие возможности оперативной регистрации ошибок, таких, как пропадание пли появление лишних импульсов из-за помех.
Эти недостатки ликвидируются введением избыточности, а именно скорость передачи сигналов по линии выбирается равной скорости передачи информации, однако вводятся дополнительные электрические уровни. В данном случае – «нулевого» уровня. А также использованием двух фаз.
Интерфейс ARINC-429 называется радиальным, т.к. в интерфейсе обычно к одному каналу подключен только один передатчик, а каждая принимающая система должна иметь свою радиальную физическую линию связи с этим передатчиком (соединение типа звезда). Наличие в структуре кода 8-разрядной адресной части позволяет передавать в канале до 256 различных параметров. Адрес параметра, структура информационной части кода и протокол строго определяются стандартом.
Классическая схема, реализующая один канал ПК ARINC-429, включает не менее 75-ти триггеров различного типа, что при построении 8-ми канального контроллера еще не в такие далекие времена, да еще на отечественной элементной базе, было непозволительной роскошью, поэтому первые контроллеры строились с многоканальными коммутаторами на входных каналах и минимальным количеством выходных каналов, работающих на несколько переключаемых передатчиков.
На рис.4 приведена классическая схема одноканального входного преобразователя ПК по ARINC-429, на входах его приемника может быть установлен аналоговый коммутатор на любое количество каналов, но в каждый момент времени «слушается» только один канал, информация других каналов безвозвратно теряется, что в системах реального времени (СРВ), особенно авиационных, не всегда допустимо.

Рис.4. Пример построения схемы входного преобразователя ПК по
ARINC – 429
ГИ – вход от Генератора Импульсов; D,C – выход данных, синхросигнала приемника;
F – частота опроса паузы.
Такой контроллер занимал значительные ресурсы времени центрального процессора (ЦП), о канальном процессоре тогда не могло быть и речи, и все равно не справлялся с задачей организации потоков информации в СРВ системах, так как доступ к каналам осуществлялся в режиме разделения во времени.
В конце восьмидесятых годов в Соединенных Штатах фирмой HARRIS был разработан комплект БИС контроллера ARINC-429, включающий собственно БИС контроллер на два входных и один выходной канал ПК (HS3282) и ИС аналогового передатчика ПК (HS3182). Контроллер имел встроенные приемники ПК и FIFO выходного канала на 16 слов ПК, управление и обмен информацией с контроллером осуществлялся через специализированную шину портов-регистров контроллера и функциональные входы БИС. В дальнейшем за рубежом появлялись новые разработки, но в основе они повторяли первый контроллер фирмы HARRIS. С повышением интеграции компонентов обозначилась стандартная структура построения многоканального контроллера ARINC-429 с включением канального процессора и обменом с ЦП через ОЗУ двойного доступа (ДД) или в режиме прямого доступа (ПД). Но все эти достижения до последнего времени по понятным причинам, были недоступны отечественным разработчикам, тем более что большинство зарубежных разработок имели военное применение.
Отечественные ОКБ за период 1997-99 годов разработали и производят целые семейства адаптеров ARINC-429 для авиационной аппаратуры.
Первой разработкой был контроллер МРС429-1 конфигурации 4R/4T с производительностью 800 Кбит/ сек., выполненный в стандартном конструктиве MicroPC для 8-разрядной шины ISA на трех БИС FLEX- логики фирмы ALTERA. Каждый канал имел буфер данных на одно слово ПК, при приеме ПК или готовности выдачи, контроллер формировал прерывание шине ISA, обмен с ЦП, в том числе и настройка каналов на частоту ПК, осуществлялась через регистры контроллера в области портов шины ISA. Приемо-передающий тракт контроллера был выполнен на отечественных гибридных микросборках АП00З, АП004.
Следующей разработкой был адаптер МРС429-2 конфигурации 8R/4T с производительностью 1000 Кбит/сек., выполненный в том же стандарте MicroPC 8-разрядной шины ISA. Его характеристики отличались не только количеством каналов, но прежде всего большей «интеллектуальностью» - контроллер имел буферное ОЗУ емкостью 32К байт, куда записывались и хранились принятые и выдаваемые данные слов ПК, в ОЗУ же располагались регистры управления каналов ПК для задания режимов приема-выдачи.
Контроллер обеспечивал следующие режимы приема-выдачи ПК:
- программную настройку каналов на режим контроля нечетности и частоту приема-выдачи ПК;
- прием ПК по адресу параметра (АП), когда принятые данные записывались в буферную зону ОЗУ, закрепленную за каждым каналом в соответствии с адресом АП принятого слова ПК, при приеме ПК с программно-заданным кодом АП контроллер формировал прерывание шине ISA;
- прием ПК по счетчику слов (СС), когда принятые ПК записывались в ту же зону ОЗУ последовательно по мере поступления, при приеме программно-заданного количества слов формировалось прерывание шине ISA;
- выдача ПК, однократная или непрерывная, в режиме программного расписания (ПР), когда программно задается число слов ПК в кадре выдачи, а данные выдачи берутся из буферной зоны ОЗУ по адресу таблицы ПР, которая как и буфер данных располагается в зонах ОЗУ, закрепленных за каждым выходным каналом. Программное расписание задается пользователем при инициализации режима выдачи и ставит в соответствие значение номера слова выдачи - адресу ОЗУ, где хранится параметр выдачи, при выдаче программно-заданного количества слов ПК контроллер формирует прерывание шине ISA.
Обмен процессора с регистрами и ОЗУ контроллера осуществлялся через порты шины ISA контроллера. Приемники-передатчики ПК выполнены на прошедших проверку опытных образцах отечественных твердотельных ИС 1567АП1,АП2.
Все вышеперечисленные устройства, производимые отечественными ОКБ, при изготовлении проходят проверку на работоспособность в различных режимах работы по техническим условиям (ТУ), в т.ч. с реальной нагрузкой, проверка осуществляется в рамках тестового программного обеспечения (ПО), которое содержит также пользовательские драйверы для DOS и WINDOWS приложений и примеры построения рабочих программ с использованием этих драйверов.
- Принцип построения и элементная база структур с мультиплексным каналом. Стандарт MIL STD-1553B
Для локального многоточечного соединения распределенных подсистем специального назначения широко применяются стандартизированные интерфейсы последовательных мультиплексных (магистральных) каналов (МК) типа MIL-1553В, MIL-1773. Интерфейсы обеспечивают расширенные режимы адресации, включая широковещательный режим, защиту от помех и идентификацию ошибок передачи.
В состав МК входят контроллер (К), оконечные устройства (OУ) в количестве до 32, линии передачи информации. Контроллер, обыч но входящий в состав ЭВМ, управляет обменом информацией, осуществляет сопряжение с линией передачи и контроль передачи информации, состояния ОУ и самоконтроль. Оконечное устройство принимает и выполняет адресованные ему команды контроллера, осуществляет сопряжение подключенного оборудования с линией пе редачи информации, контролирует передачу информации, производит самоконтроль и передает результаты контроля в контроллер.
Обмен информацией осуществляется по принципу команда-отчет с временным разделением сообщений. Информация передается в МК в виде сообщений, состоящих из командных (КС), информационных (ИС) и ответных слов (ОС).
В МК предусмотрены три вида передач сообщений:
от К к ОУ;
от ОУ к К;
от ОУ к ОУ.
Порядок следования сообщений произвольный.
Форматы сообщений при передаче информации:
- от К к ОУ— (КС, ИС, ..., ИС, Т 1, КС, ТЗ);
- от ОУ к К— (КС, Т2, ОС, ИС,..., ИС, ТЗ);
- от ОУ к ОУ— (КС, КС, Т2, ОС, ИС, ...,ИС, Т1, ОС, ТЗ),
где Т1, Т2, ТЗ — времена соответствующих пауз (Т1 — между послед ним ИС массива и ОС; Т2 — между КС и ОС; ТЗ — между последним ИС или КС и КС следующего сообщения).
Формат командного сообщения (приказа) от К к ОУ — (КС, Т2, ОС, ТЗ). Информационные сообщения передаются пословно или массивами длиной до 32 слов. Передача информации осуществляется последовательным цифровым кодом по общей линии МК, асинхронным способом с выделением синхронизирующих сигналов из принимаемого кода в полудуплексном режиме.
Формат К.С, ИС, ОС (в разрядах): С—синхросигнал (3), инфор мация— (215...20), Р—контроль по нечетности (1).
Информация длиной более 16 разрядов передается последова тельно в двух словах, в первом — с большим весом, во втором — с меньшим весом, неиспользованные разряды — в виде лог. 0.
Командное слово содержит следующие поля (разряды): адрес ОУ (5); признак «прием/передача» (1); подадрес/режим управления (5); число информационных слов/код режима управления (5).
Каждому ОУ присваивается один из 32 адресов, за исключением адреса 31, зарезервированного для специальных целей (широковеща тельного режима). Подадрес используется для указания адреса вво димой/выводимой информации. Код 0 подадреса указывает ОУ, что поле числа слов содержит код команды управления.
Число информационных слов указывается ОУ в двоичном коде, причем коду 0 соответствует число 32. Команды и коды режима уп равления приведены в табл. 3 и используются с учетом функцио нального назначения ОУ или К. Информационное слово содержит следующие поля (в разрядах): С (3); информацию (16). Ответное слово содержит следующие поля (в разрядах): С (3); адрес ОУ (5); признаки состояния (11).
Поле признаков состояния содержит следующие разряды:
- «ошибка в сообщении» (указывает наличие/отсутствие достоверности принятого ОУ предыдущего сообщения);
- «подсистема занята» (при лог. 1 сообщает К, что подсистема не может передать данные ОУ);
Таблица 1.
Команды режима управления
|
Наименование |
Обозначения |
Код |
|
Принять управление каналом |
ПУК |
00000 |
|
Передать ответное слово |
ПОС |
00001 |
|
Провести самоконтроль |
ПС |
00010 |
|
Блокировать передатчик |
БП |
00011 |
|
Разблокировать передатчик |
РП |
00100 |
|
Установить исходное состояние |
УИС |
00101 |
|
Резерв |
– |
00110...11111 |
- «принято управление каналом» (при лог. 1 сообщает в ответ на соответствующую команду, что другой К, выполняющий в данный момент функции ОУ, принял управление каналом);
- «неисправность оконечного устройства» (при лог. 1 сообщает К о неисправности ОУ); разряд контроля по нечетности, который используется обычным образом.
Команда ПУК указывает К, работающему в данный момент вре мени как ОУ, на то, что он должен принять управление каналом. Контроллер, приняв адресованную ему команду, выдает ОС, в котором устанавливает соответствующий разряд в поле признаков состояния, после чего берет управление МК. Если К указывает в ОС, что он не принимает команду, то К, передавший команду, продолжают осуществлять управление МК.
По команде ПОС оконечное устройство передает ответное слово, по ПС – проводит самоконтроль, по БП – блокирует передатчик, соединенный с резервной шиной, производит установку необходимых схем и узлов в исходное состояние.
Сообщения передаются без пауз между КС при передаче от ОУ к ОУ; КС и первым ИС массива при передаче от К к ОУ; ИС массива; ОС передающего ОУ и первым ИС массива.
При передаче сообщений паузы Т1, Т2 должны быть (в интервале от 2 до 10 мкс) между: КС и ОС (Т2); последним ИС массива и ОС (Т1). Пауза ТЗ между последним ИС или ОС сообщения и КС следующего сообщения — не менее 2 мкс.
В качестве кода передачи информации применяется биполярный двухуровневый фазоманипулированный код без возвращения к нулю, так называемый код Манчестер-II. Скорость передачи составляет 1 Мбит/с±0,1 %. Манчестер-II является кодом, в котором скорость передачи сигналов по линии выбирается большей, чем скорость передачи информации, без использования дополнительных электрических уровней сигналов.
Слово, принятое К или ОУ, должно удовлетворять следующим требованиям:
- началом слова является синхросигнал (3 бита):
- 17 информационных сигналов соответствует используемому коду (Манчестер-II);
- 16 разрядов слова удовлетворяют проверке на нечетность. При несоответствии принятого слова этим требованиям оно считается недостоверным. В этом случае в ответном слове устройства устанавливается лог. 1 в разряде «ошибка в сообщении».
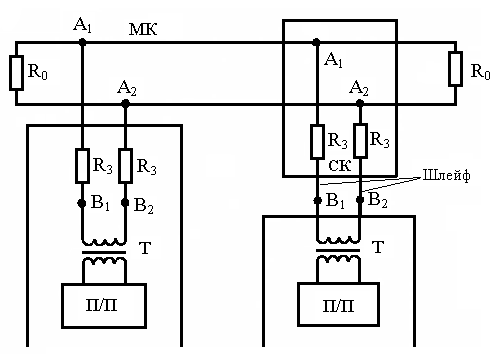
Рис. 5. Схема подключения к магистральному каналу MIL STD 1553B
Контроллер повторно производит передачу сообщения, если: ОС, поступившее в К, содержит лог. 1 в разряде «ошибка в сообщении»; принятая К информация недостоверна; ОС не поступает в К в течение 10 мкс после передачи им КС или последнего ИС, после передачи К второго КС или после передачи ОУ последнего ИС. Число повторных передач сообщений и формирование признака отказа оборудования определяется в зависимости от функционального назначения системы (комплекса).
Линия связи представляет магистральную шину (рис.5) с ответвителями (шлейфами), согласованную с обеих сторон резисторами Ro=75 0м ±5 %. Подключение к МК осуществляется с соединительной коробкой (СК) или без нее через схему, содержащую защитные резисторы (RЗ=56Ом ±5%), трансформатор гальванической развязки (Т), прием ник/передатчик (П/П) .
К МК длиной не более 100 м обычно подключается не более 32 шлейфов длиной не более 6 м каждый. В специальных случаях воз можно подключение до 64 ОУ при длине шлейфов не более 0,1 м, входном сопротивлении П/П не менее 6 кОм, длине МК до 120 м с волновым сопротивлением =150 0м.
Кабель линии передний выполняется в виде симметричного экра нированного кабеля на основе витой пары проводов с волновым со противлением =75 0м ±10 %. Волновое сопротивление кабеля шлейфа — 150 0м±10 %. Затухание сигналов на 1 м длины кабеля на частоте 1 МГц – не более 0,03 дБ при электрической емкости не более 90 нФ. Число скруток жил на 1 м длины кабеля — не менее 40 для кабеля с =75 0м и не менее 25 для кабеля с =150 0м.
Вид электрических сигналов передачи информации соответствует требованиям рис. 6. Сигналы, поступающие от передатчика в МК: диапазон изменения полного размаха сигнала – 3…10 В, длительность полуволны информационного сигнала – 0,50 мкс ±5°/о; длительность фронта и среза – 0,1...0,15 мкс.
Единица кодируется отрицательным перепадом сигнала в середине битового интервала, нуль – положительным перепадом. На границах битовых интервалов сигнал, если это необходимо, меняет значение, «готовясь» к отображению очередного бита в середине следующего битового интервала. Поскольку число положительных и отрицательных импульсов на любом достаточно большом отрезке времени равно (отличается не более чем на один импульс, что не имеет значения), постоянная составляющая равна нулю. Подстройка часов приемника или ретранслятора производится при передаче каждого бита, т. е. снимается проблема рассинхронизации. Спектр сигнала содержит только две логические составляющие: F и 2F, где F – скорость передачи информационных бит. Наличие только двух (а не трех или более) электрических уровней напряжения позволяет надежно их распознавать (хорошая помехозащищенность).
Критерием ошибки может являться «замораживание» сигнала на одном из уровней на время, превышающее время передачи одного информационного бита, поскольку независимо от передаваемого кода сигнал всегда «колеблется» и никогда не «замирает». Плата за эти чрезвычайно полезные качества – удвоение требуемой пропускной способности связной аппаратуры.
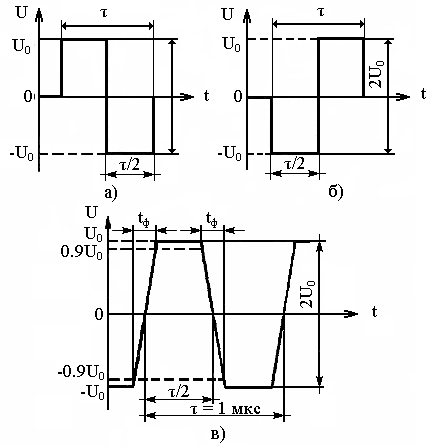
Рис. 6. Сигналы передачи информации в магистрали MIL STD 1553B
а – лог. 1; б –_лог. 0; в – форма сигнала.
Сигналы, поступающие из М.К на вход приемника (а точках В1, В2): диапазон изменения полного размаха сигнала—1,..10 В; форма сигналов — от прямоугольной до синусоидальной; входное сопротив ление— не менее 2 кОм в диапазоне частот 0,1...1 МГц.
Оконечное устройство и совмещенное с ним оборудование сопрягаются через цифровой интерфейс, назначение линий которого приведено в табл. 4. Информация передается по шине последовательным кодом в виде 17-разрядных двоичных слов, причем последним передается разряд по нечетности. Скорость передачи информации – 1 Мбит/с ±0,1%.
- Логика работы кодера по стандарту MIL-STD 1553B
Микросхема HD-15530, фирмы Harris Semicondactor предназначена для обеспечения интерфейса по стандарту MIL-STD 15530. HD-15530 состоит из двух частей - кодера (Encoder) и декодера (Decoder), каждая из которых работает независимо (за исключением функции общего сброса). DD-1553 отвечает большинству требованиям стандарта MIL-STD 1553. Кодер кодирует данные, а также добавляет синхроимпульс и бит четности. Декодер выделяет синхроимпульс и проверяет бит четности. Структурная схеме кодера и декодера показана на рисунке 7.
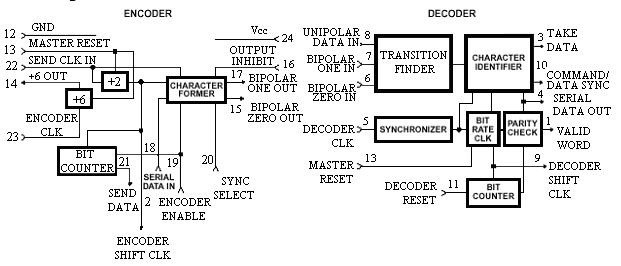
Рис. 7. Структурная схема кодера и декодера
5.1. Логика работы кодера
Для работы кодеру требуется один генератор тактовой частоты (в 2 раза большей чем частота передачи данных), подключаемый к входу SEND CLK. В схеме кодера предусмотрен вспомогательный счетчик, осуществляющий деление на 6 для ого чтобы получать сигнал SEND CLK из сигнала DECODER CLK (равный двенадцатикратной частоте передачи данных). Цикл кодера начинается когда сигнал ENCODER ENABLE имеет высокий уровень во время заднего фронта сигнала ENCODER SHIFT CLK (1). Во время следующего переднего фронта сигнала ENCODER SHIFT CLK сигнал SYNC SELECT определяет какой синхроимпульс будет формироваться (высокий уровень - командное слово, низкий - данные) - (2). Цикл длится в течении 20-ти периодов сигнала ENCODER SHIFT CLK. Когда кодер готов принимать данные он устанавливает высокий уровень на выходе SEND DATA и поддерживает его в течении 16-ти периодов сигнала ENCODER SHIFT CLK. После передачи синхроимпульса кодер кодирует и передает данные, поступающие на вход SERIAL DATA. Эти данные синхронизируются сигналом ENCODER SHIFT CLK. Потом кодер добавляет бит четности для этого слова (5). Если сигнал ENCODER ENABLE будет все время иметь высокий уровень, то слова будут передаваться без межкадрового интервала. В то же время низкий уровень сигнала OUTPUT INHIBIT переводит выводы BIPOLAR ONE и BIPOLAR ZERO в неактивное состояние, но не оказывает никакого влияния на кодер. Сброс кодера во время передачи осуществляется сигналом MASTER RESET. Временные диаграммы работы кодера показаны на рисунке 8.
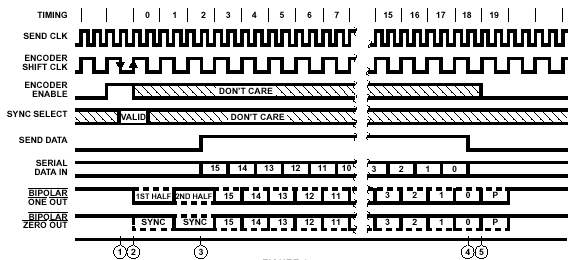
Рис. 8. Временные диаграммы работы кодера
5.2. Логика работы декодера
На вход декодера DECODER CLK должны подаваться синхроимпульсы с 12-ти кратной частотой передачи данных. Декодер постоянно сканирует входы по которым поступают данные и получив верные синхроимпульс и два бита в коде Манчестер 2 начинает цикл вывода данных. Вывод COMMAND/DATA SYNC на тип принимаемого слова (высокий уровень - командное слово, низкий - данные). Этот сигнал удерживается пока декодер передает данные через вывод SERIAL DATA OUT в коде без возврата к нулю. Сигнал с вывода DECODER SHIFT CLOCK синхронизирует передаваемые данные. После декодирования данных декодер проверяет бит четности. Вывод декодера VALID WORD указывает на правильность принимаемого слова. Этот сигнал устанавливается с начало цикла передачи данных и удерживается в течении 20-ти периодов сигнала DECODER SHIFT CLOCK (низкий уровень - правильное слово). Временные диаграммы работы декодера показаны на рисунке 9.
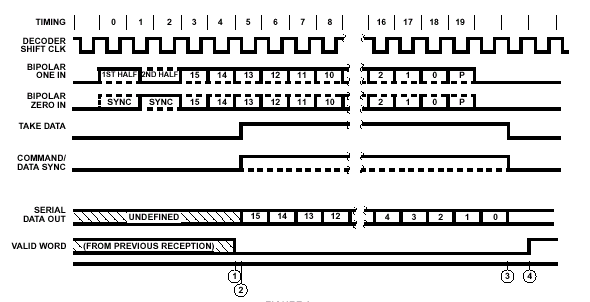
Рис. 3. Временные диаграммы работы декодера
Заключение
Анализ стандартов MIL-STD-1553B позволяет сделать вывод о широких возможностях, заложенных в протокол обмена и электрические спецификации, что открывает благоприятные перспективы для широкого внедрения стандарта в САУ РВ.
Дальнейшие перспективы в области разработки адаптеров интерфейса ARINC 429 бортового применения определяются, прежде всего, разработкой и появлением новых бортовых вычислительных систем. В перспективных планах – унифицированный подход в части схемотехнических решений и программной модели контроллеров ARINC 429, эти решения в основном отработаны в разработках последних контроллеров.
Контрольные вопросы
- Основные требования к локальной информационной сети современных ЛА.
- Достоинства и недостатки биполярного RZ сигнала применяемого в стандарте ARINC 429.
- Классическая схема одноканального преобразователя ПК по ARINC 429 (пояснить блок схему).
- Вид электрических сигналов передачи информации в магистрали MIL-STD-1553B.
- Логика работы кодера по стандарту MIL-STD-1553B.
- Логика работы декодера по стандарту MIL-STD-1553B.
PAGE 1
АРХИТЕКТУРА И ЭЛЕМЕНТНАЯ БАЗА ЛОКАЛЬНЫЕ ВЫЧИСЛИТЕЛЬНЫХ СЕТЕЙ ЛА