Структурные формулы для определения числа степеней свободы пространственных и плоских механизмов
Структурные формулы устанавливают связь между числом степеней свободы механизма, числом его звеньев, видом и числом кинематических пар, входящих в его состав.
Различают механизмы плоские и пространственные. К плоским относятся механизмы, все звенья которых совершают движение в плоскостях, параллельных одной неподвижной плоскости. Все остальные механизмы относятся к пространственным.
Числом степеней свободы механизма называется число независимых координат, определяющих положение всех звеньев относительно стойки. Каждая из таких координат называется обобщенной. Т.е. число степеней свободы механизма равно числу обобщенных координат.
Структурная формула Сомова - Малышева для пространственных механизмов.
W = 6n - 5p1 - 4p2 - 3p3 - 2p4 - 1p5, где
W - число степеней свободы механизма,
n - число подвижных звеньев,
p1, p2, p3, p4, p5 - соответственно число одно, двух, трех, четырех и пятиподвижных кинематических пар,
6 - число степеней свободы отдельно взятого тела в пространстве,
5, 4, 3, 2, 1 - число условий связи, накладываемое соответственно на одно, двух, трех, четырех и пятиподвижные пары.
Структурная формула Чебышева для плоского механизма:
W = 3n - 2p1 - 1p2, где
W - число степеней свободы плоского механизма,
n - число подвижных звеньев,
p1 – число одноподвижных кинематических пар, являющимися в плоскости низшими кинематическими парами,
p2 - число двухподвижных кинематических пар, которые в плоскости являются высшими,
3 - число степеней свободы тела на плоскости (рис. 1.11),
2 - число связей, накладываемое на низшую кинематическую пару (рис. 1.12 а),
1- число связей, накладываемое на высшую кинематическую пару (рис. 1.12 б).
Рассмотрим примеры.
Пример № 1. Определить число степеней свободы W кривошипно-коромыслового механизма (рис. 1.13):
W = 3n - 2p1 - 1p2, (1.1)
n = 3 (кривошип 1, шатун 2, коромысло 3),
p1 = 4[А (0-1), В(1-2), С(2-3), Д(3-0)],
p2 = 0.
W = 3 ? 3 - 2 ? 4 - 0 = 9 - 8 = 1.
Это означает, что достаточно задать только один параметр, например, угол поворота кривошипа j1, и положение всех звеньев будет строго определено относительно стойки.
Координата j1, определяющая положение звеньев относительно стойки, называется обобщенной, а звено 1, которому приписана эта координата - начальным.
Пример № 2. Определить число степеней свободы пятизвенного механизма (рис. 1.14).
n = 4 (кривошип 1, шатун 2, шатун 3, коромысло 4),
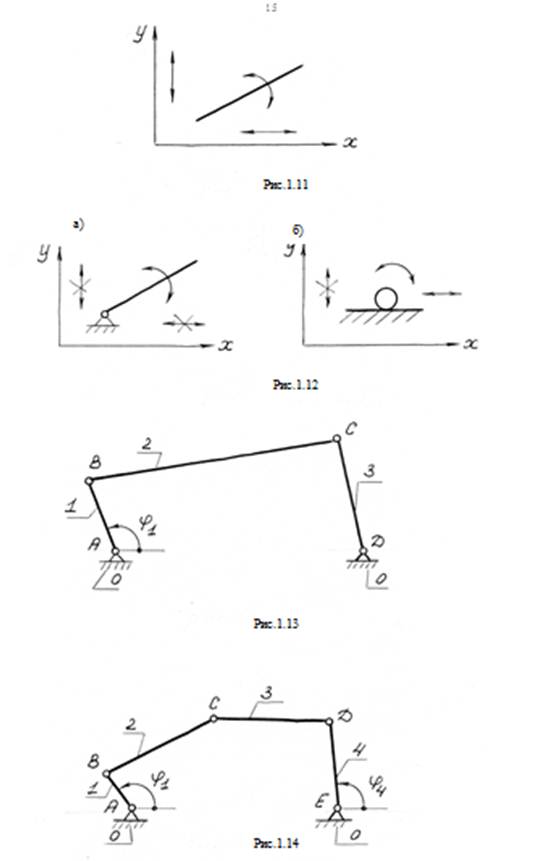
p1 = 5[А(0-1), В(1-2), С(2-3), Д(3-4), Е(4-0)],
p2 = 0.
W = 3 ? 4 - 2 ? 5 - 0 = 12 - 10 = 2.
У механизма две степени свободы и одним параметром j1 (или j4) положение звеньев определить нельзя. Надо задаваться двумя параметрами j1 и j4 (обобщенные координаты) для определения положения всех звеньев относительно стойки.
Пример № 3.
Определить число степеней свободы W кулачкового механизма (рис. 1.15).
n = 2(кулачок 1, толкатель 2),
p1 = 2[А(0-1), П(2-0)],
p2 = 1 [(1-2)],
W = 3 ? 2 - 2 ? 2 - 1 = 6 - 4 - 1 = 1.
У механизма одна степень свободы, т.е. каждому положению кулачка, определяемому углом его поворота, соответствует строго определенное перемещение толкателя.
Просмотров: 1457
Вернуться в оглавление: Теория механизмов и машин