Основные уравнения для определения скоростей и ускорений звеньев
Звено может совершать поступательное, вращательное или сложное движение.
- Звено совершает поступательное движение.
Скорости всех точек звена одинаковы по величине и по направлению Аналогично равны по величине и по направлению и ускорения всех точек (рис. 2.1).
- Звено совершает вращательное движение.
Известна угловая скорость звена w, угловое ускорение e, длина звена iАВ. Требуется определить скорость VВ точки В и ускорение этой точки аВ (рис. 2.2).
Связь между линейной и угловой скоростью имеет вид: Vв = w ? iАВ [м/с].
Траектория движения точки В - дуга окружности радиуса iАВ; вектор скорости точки В перпендикулярен радиусу и направлен в сторону вращения звена. Полное абсолютное ускорение точки В складывается из двух составляющих: нормальной ![]() nв и тангенциальной
nв и тангенциальной ![]() tв:
tв: ![]() в =
в = ![]() nв +
nв + ![]() tв или ав =
tв или ав =![]() , где
, где
![]() nв = w2 iАВ = V2В/iАВ [м/с2],
nв = w2 iАВ = V2В/iАВ [м/с2],
![]() tв = e ? iАВ [м/с2]
tв = e ? iАВ [м/с2]
Нормальное ускорение направлено по звену к его центру вращения; тангенциальное ускорение направлено в сторону углового ускорения e перпендикулярно звену .
- Сложное движение звена.
Его можно представить как сумму переносного и относительного движений:
![]() абс =
абс = ![]() пер +
пер + ![]() отн
отн
?
![]() абс =
абс = ![]() пер +
пер + ![]() к +
к + ![]() r, где
r, где ![]() к = 2wпер ? Vотн sin(vпер;
к = 2wпер ? Vотн sin(vпер; ![]() отн),
отн),
wпер - переносная угловая скорость;
Vотн - относительная линейная скорость;
![]() r - релятивное (относительное) ускорение.
r - релятивное (относительное) ускорение.
^
Для плоского механизма (vпер;![]() отн) = 900 , следовательно а к = 2wпер ? Vотн.
отн) = 900 , следовательно а к = 2wпер ? Vотн.
Существует два способа разложения сложного движения, применяемые в ТММ.
I способ.
Применяется для точек одного звена, когда известны скорость и ускорение одной точки звена (т.В) и требуется определить скорость или ускорение другой точки (т.С) этого же звена ( рис. 2.3).
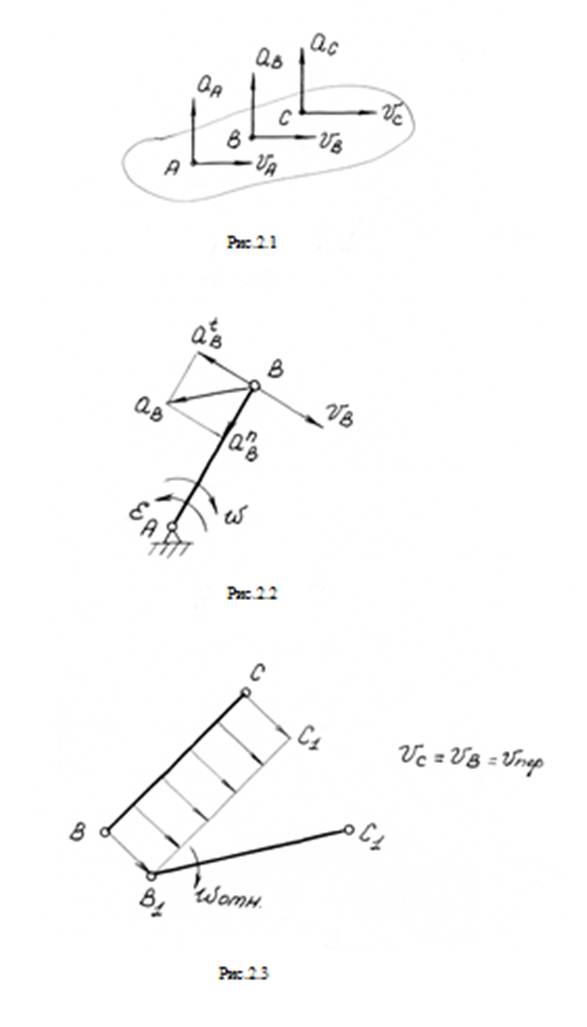
При этом сложное движение точки В раскладывается на переносное поступательное вместе со скоростью (ускорением) точки точки С и относительное вращательное вокруг этой точки.
Пусть для звена ВС известны скорость и ускорение точки В: ![]() и
и ![]() . Требуется определить скорость и ускорение точки С.
. Требуется определить скорость и ускорение точки С.
Если звено ВС в конце движения должно занять положение В1 С1, то можно представить, что вначале все точки звена переместятся параллельно самим себе с одинаковой скоростью ![]() С =
С = ![]() В =
В = ![]() пер в переносном движении, а затем это звено повернется относительно точки В со скоростью wотн:
пер в переносном движении, а затем это звено повернется относительно точки В со скоростью wотн:
![]() С =
С = ![]() В +
В + ![]() СВ
СВ
Для скорости VВ известны ее модуль и направление ( в дальнейшем подчеркивание двумя чертами будет означать, что известны как модуль, так и направление рассматриваемого параметра ( в данном случае - скорости), подчеркивание одной чертой означает, что известны или модуль, или направление).
Для относительной скорости VСВ = wотн ? lСВ известна линия, вдоль которой направлена эта скорость (перпендикулярно ВС).
Выражение для определения ускорения точки С будет иметь вид:
![]()
ак = 0, так как переносное движение поступательное и wпер = 0.
Относительное движение, вращательное, раскладывается на две составляющие - нормальное и тангенциальное:
![]() , где
, где
аnСВ= V2CB/lСВ = w2отн?lСВ - нормальное ускорение, направленное к центру относительного вращения (точка В),
аtСВ= e?lСВ - тангенциальное ускорение, направленное перпендикулярно звену.
2 способ
Применяется для двух звеньев, образующих поступательную пару (рис.2.4), например, если известно движение звена 2 (направляющей), а требуется определить движение звена 3.
Пусть точка А принадлежит звену 2 (проекцию этой точки на звено 3 обозначим А3). Известно движение точки А звена 2 (скорость ![]() А2 и ускорение
А2 и ускорение ![]() А2.). Требуется определить скорость и ускорение точки А3 третьего звена:
А2.). Требуется определить скорость и ускорение точки А3 третьего звена: ![]() А3 ,
А3 , ![]() А3.
А3.
Движение звена 3 можно разложить на переносное вместе со звеном 2 и на относительное поступательное звена 3 относительно звена 2 вдоль его направляющей. Переносное движение второго звена может быть поступательным, вращательным, сложным..
Скорость точки А3 третьего звена представим как сумму переносной и относительной скорости:
![]() А3 =
А3 = ![]() А2 +
А2 + ![]() А3 А2
А3 А2
Переносная скорость ![]() А2 известна по величине и по направлению,
А2 известна по величине и по направлению,
Скорость ![]() А3 А2 точки А3 звена 3 относительно звена 2 направлена параллельно направляющей a - a поступательной пары.
А3 А2 точки А3 звена 3 относительно звена 2 направлена параллельно направляющей a - a поступательной пары.
Ускорение точки А3 третьего звена определится уравнением:
![]() А3 =
А3 = ![]() А2 +
А2 + ![]() кА3А2 +
кА3А2 + ![]() r А3А2,,
r А3А2,,
в котором ![]() А2 и акА3А2 известны по величине и по направлению, а именно:
А2 и акА3А2 известны по величине и по направлению, а именно: ![]() А2 -
А2 -
задано, ![]() кА3А2 = 2 • wпер •Vотн = 2w2 • VА3А2.
кА3А2 = 2 • wпер •Vотн = 2w2 • VА3А2.
Для определения направления кориолисова ускорения необходимо вектор относительной скорости ![]() повернуть на 900 в направлении угловой скорости wпер = w2 переносного движения.
повернуть на 900 в направлении угловой скорости wпер = w2 переносного движения.
Определение относительного (релятивного) ускорения аrА3А2:
1. Если направляющие поступательной пары криволинейны (рис. 2.5), то относительное ускорение будет складываться из двух составляющих:
![]() rА3А2 =
rА3А2 = ![]() пА3А2 +
пА3А2 +![]() tА3А2, где
tА3А2, где ![]() пА3А2 = V2А3А2 / r.
пА3А2 = V2А3А2 / r.
2. Если направляющие прямолинейны (т.е. r = ?), то ![]() nА3А2 = 0, аtА3А2 = аrА3А2 и ускорение направлено вдоль направляющей a-a..
nА3А2 = 0, аtА3А2 = аrА3А2 и ускорение направлено вдоль направляющей a-a..
Кинематическое исследование механизмов методом построения планов скоростей и ускорений ведётся по группам Ассура в порядке их присоединения к начальному звену и стойке. Для любой группы Ассура известны или могут быть определены скорости (ускорения) внешних кинематических пар и совместным решением двух векторных уравнений можно определить скорость (ускорение) внутренней кинематической пары. При составлении векторных уравнений используются указанные выше два способа разложения движения.
Просмотров: 801
Вернуться в оглавление: Теория механизмов и машин