Аналитический метод кинематического исследования механизмов
Удобно определять не сами скорости и ускорения, а их аналоги. При заданной схеме механизма аналоги скоростей и ускорений являются функциями обобщенных координат механизма или (при W=1) - обобщенной координаты. Такой путь решения позволяет задачу о кинематическом исследовании свести к задаче об определении некоторых геометрических характеристик схемы, используя которые, при заданном законе изменения по времени обобщенных координат механизма, можно определить действительную скорость и ускорение.
Предположим, что для механизма с одной степенью свободы определены угол поворота i-ого звена и координаты точки М, как функции обобщенной координаты механизма.
![]() ,
, ![]() ,
,![]() . Здесьq – обобщенная координата, хм - абсцисса точки М, ум - ордината точки М.
. Здесьq – обобщенная координата, хм - абсцисса точки М, ум - ордината точки М.
Определение скоростей
Угловая скорость i-ого звена
![]()
![]()
![]()
![]() - по аналогии.
- по аналогии.
В этих формулах ![]() - первая производная обобщенной координаты механизма по времени, называемая обобщенной скоростью механизма;
- первая производная обобщенной координаты механизма по времени, называемая обобщенной скоростью механизма;
![]()
![]() - производные координат точки М по обобщенной координате механизма – проекции аналога скорости точки М на координатные оси.
- производные координат точки М по обобщенной координате механизма – проекции аналога скорости точки М на координатные оси.
Полный аналог скорости точки М:
![]()
![]()
Скорость точки М: ![]()
Определение ускорений
Угловое ускорение для i-го звена
![]()
После преобразований получаем:

Проекции ускорения точки М на оси х и у:
![]()
![]() ,
,
где ![]() - вторая производная обобщенной координаты по времени.
- вторая производная обобщенной координаты по времени.
![]() ,
, ![]() - вторые производные координат точки М по обобщенной координате (проекции аналога ускорения точки М на координатные оси).
- вторые производные координат точки М по обобщенной координате (проекции аналога ускорения точки М на координатные оси).
Полный аналог ускорения: ![]()
Полное ускорение: ![]()
При угловой обобщенной координате обобщенная скорость механизма – это угловая скорость начального звена (размерность с-1), а ![]() - угловое ускорение начального звена (с-2).
- угловое ускорение начального звена (с-2).
Аналоги угловой скорости и углового ускорения звена являются безразмерными величинами, а аналоги скоростей и ускорений точки имеют размерность длины.
Для этого случая:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В частном случае, когда ![]() и
и ![]() :
:
![]()
![]()
![]() ;
; ![]()
Пример аналитического исследования кинематики кривошипно-ползунного механизма
Применим метод замкнутых векторных контуров (метод Зиновьева).
Условие замкнутости контура, составленного звеньями механизма, записывается в векторной форме. Затем слагаемые этого равенства проецируются на координатные оси, что позволяет получить уравнения, определяющие положение звеньев и их точек. Последовательным дифференцированием этих уравнений определяют аналоги скоростей и ускорений.
Условие замкнутости контура ABCA (рис. 2.16) запишется в виде:
![]()
![]()
![]()
Проекции векторов этого равенства на оси Xи Y дают:
![]() (а)
(а)
![]() (б)
(б)
Углы ![]() и
и ![]() отсчитываются от положительного направления оси абсцисс.
отсчитываются от положительного направления оси абсцисс.
Из второго уравнения найдем функцию положения звена 2:
![]() , (в)
, (в)
где ![]() ;
; ![]()
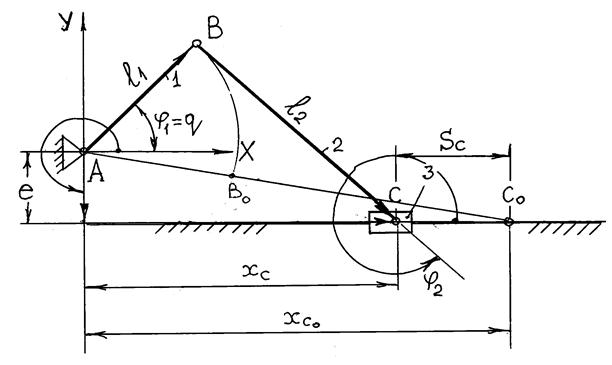
Рис. 2.16
Положение ползуна удобно задавать от его правого крайнего положения: ![]() , где
, где ![]() - координата, определяющая крайнее правое положение ползуна. С учетом выражения (а)
- координата, определяющая крайнее правое положение ползуна. С учетом выражения (а) ![]() .
.
Определим далее аналоги скоростей:
![]() - для шатуна 2, и
- для шатуна 2, и ![]() - для ползуна 3.
- для ползуна 3.
Дифференцируя выражение (в) получим: ![]() , откуда
, откуда
![]()
Аналог скорости ползуна найдется, как

![]()
Аналоги ускорений:

 .
.

Таким образом, имея выражения, определяющие положения звеньев, их аналоги скоростей и ускорений в функции обобщенной координаты ![]() , можно, задаваясь величиной
, можно, задаваясь величиной ![]() , определить скорости, ускорения и расположения звеньев в любом положении механизма.
, определить скорости, ускорения и расположения звеньев в любом положении механизма.
Просмотров: 826
Вернуться в оглавление: Теория механизмов и машин