Разработка медицинского цифрового термометра
АННОТАЦИЯ
В данной курсовой работе произведена разработка медицинского цифрового термометра на основе AVR микроконтроллера ATmega103 с характеристиками, согласно заданию. Выполнена разработка функциональной и структурной схем. Приведена подробная информация о выбранных элементах структурной схемы.
СОДЕРЖАНИЕ
ВведениетАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж5
Обзор существующих решений тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж 6
1. Разработка схемы
Разработка структурной схемы тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж8
Разработка функциональной схемы тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж9
Разработка принципиальной схемытАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж11
2. Разработка программного обеспечения
2.1 Разработка структуры программного обеспечения изделия тАжтАжтАж.12
2.2 Разработка алгоритма
одной из составных частей программного обеспечения тАжтАжтАжтАжтАж.14.
2.3 Программа тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж..16
Заключение тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж..19.
Список использованной литературы тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.20
Приложение 1 тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж21
Приложение 2 (перечень элементов)тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.тАж23
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Разработка медицинского цифрового термометра на базе контроллера AVR AТmega103
- Тип датчика температуры (термометр сопротивления 100П)
- диапазон +35 СВ° до +50 СВ°.
- точность В±0,1
- Связь с ПК через RS485
- Дисплей ЖКИ
- Память на 5 измерений
- Преобразователь напряжения питания 10-30 В.
ВВЕДЕНИЕ
В медицине и бытовой сфере проблема эффективного использования тепловой энергииВа- одна из важнейших. Ее решение возможно только при комплексной автоматизации всего теплотехнического оборудования с помощью различных цифровых приборов локального учета, контроля и управления (с возможностью соединения таких приборов в локальную вычислительную сеть для создания систем глобального регулирования всего объекта).
AVR-микроконтроллеры в сочетании с датчиками позволяют создавать эффективные системы контроля в бытовой и промышленной, а также в медицинской технике. Их главные достоинства - универсальность, программная гибкость, возможность цифровой обработки данных и реализации сложных алгоритмов управления. Интеграция в одном корпусе большого количества периферийных устройств обеспечивает компактность и низкую стоимость приборов в условиях сжатых сроков разработки и постановки изделий на производство.
Однокристальная микро-ЭВМ (микроконтроллер) представляет собой, построенную вокруг микропроцессора вычислительную систему, которая выполнена на одном кристалле вместе с микропроцессором.
В данной работе используется микроконтроллер AТmega103 фирмы Atmel. Микросхема выполнена в 40-выводном корпусе, что дает безусловный выигрыш. Таким образом, микроконтроллер имеет (4 внешних порта РА ,РВ,РС и РD). Прибор обеспечивает производительность, приближающуюся к 1 МГц. Архитектура эффективно поддерживает как языки высокого уровня, так и программы на языке ассемблер. Микроконтроллер AТmega103 содержит: 4Кбайта загружаемого ПЗУ, 256 байтов СОЗУ дает возможность наращивать память данных, программируемый последовательный UART, программируемый сторожевой таймер и многое другое.
ОБЗОР СУЩЕСТВУЮЩИХ РЕШЕНИЙ
Передо мною стояла задача разработать дешевый и компактный цифровой медицинский термометр с сетевыми возможностями.
Стандартное решение такой конструкторской задачиВа- построение схемы, выполняющей следующую последовательность действий:
- преобразование сопротивления в напряжение при помощи источника тока;
- преобразование напряжения в код при помощи встроенного в контроллер аналогово-цифрового преобразователя (АЦП);
- подача полученного кода в микроконтроллер (МК), где полученная информация обрабатывается и передается дальше.
Сегодня некоторые зарубежные фирмы выпускают АЦП, выполняющие описанную выше цепочку преобразований. Например, фирма Analog Devices производит аналого-цифровые преобразователи AD7710, AD7711 и AD7713 со встроенными операционным усилителем (с программируемым коэффициентом усиления), источниками тока и последовательным интерфейсом. Эти микросхемы адаптированы для применения в измерительных системах (где датчиками могут служить термометр сопротивления, термопара или тензорезистивный мост), и датчики подключаются непосредственно к АЦП при минимуме дополнительных компонентов. Применять такие АЦП в небольших приборах дорого (цена специализированных АЦП превышает стоимость всех остальных компонентов, вместе взятых), а использование обычных АЦП значительно увеличивает число компонентов в схеме (и отрицательно сказывается на стоимости, габаритах и надежности прибора).
Еще один путь решения поставленной задачиВа- преобразование сопротивления непосредственно в код. Имеется множество различных схем, реализующих такое преобразование. Принцип их действия основан на измерении (электронно-счетным методом) временного интервала, равного постоянной времени цепи разряда конденсатора через измеряемое сопротивление.
Рассмотрим одну из схем со средними характеристиками точности измерения. Упрощенная структурная схема такого измерителя сопротивления представлена на рис. 1, а временные диаграммы его работы на рис. 2.
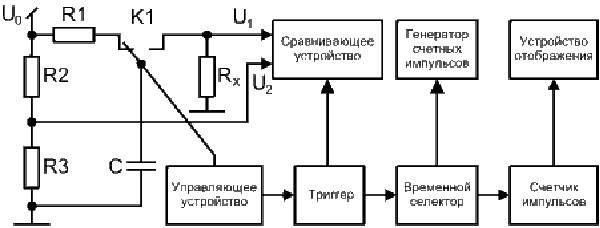 Рис. 1. Структурная схема измерителя сопротивления
Рис. 1. Структурная схема измерителя сопротивления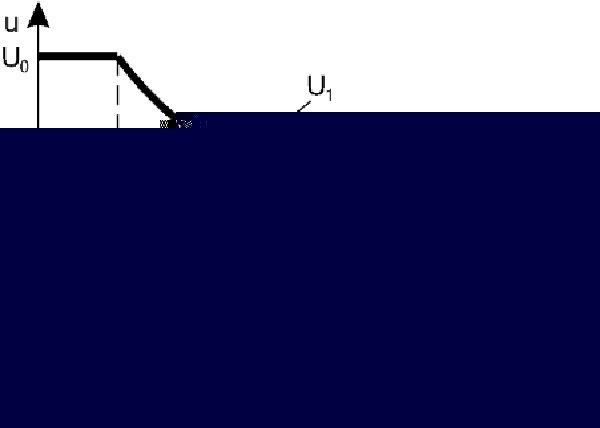 Рис. 2. Временные диаграммы измерителя сопротивления
Рис. 2. Временные диаграммы измерителя сопротивления
Перед началом измерения сопротивления RX образцовый конденсатор C контактами реле К1 подключается к источнику U0 и полностью заряжается до этого напряжения. Затем управляющее устройство переключает контакты реле К1, и конденсатор С начинает разряжаться через резистор RX. Одновременно с началом разряда (момент t0) управляющее устройство выдает импульс, которым триггер переводится в состояние 1.
При этом открывается временной селектор, и на вход электронного счетчика начинают поступать импульсы от генератора счетных импульсов.
В момент t1 напряжение U1 на конденсаторе станет равным напряжению U2, сравнивающее устройство выдаст импульс, который вернет триггер в состояние 0, и счет импульсов прекратится. За время Оґt = t1Ва- t0 счетчик подсчитывает m импульсов, следовавших с периодом TK. Так как Оґt = RX x C = m x TK (при U1 = U2), то измеряемое сопротивление будет вычисляться по формуле:
RX = m x TK/C = kR x m.
Основные недостатки такого прибора: большое количество компонентов и зависимость точности измерения от стабильности значения образцовой емкости.
Появление на рынке электронных компонентов недорогих микроконтроллеров (МК) со встроенным аналоговым компаратором позволило решить поставленную задачу, минимизировав описанную схему измерения.
После анализа существующих микроконтроллеров (имеющих аналоговый компаратор) была выбрана серия AVR, к которой относятся AT89C2313 и AT89C8515. Микросхемы данной серии имеют следующие особенности:
- достаточно высокую производительность (как показали расчеты, МК типа AT89C1051, AT89C2051 и PIC16CE625 для предложенной схемы измерения не подходят из-за низкой производительности, а высокая частота МК типа SX18AC не позволяет увеличить разрядность схемы измерения, т.к. на высокой частоте проявляется влияние аналоговых параметров схемы);
- асинхронный последовательный порт UART (в SX18AC и PIC16CE625 его нет);
- сторожевой таймер, что особенно важно для автономных приборов;
- электрически стираемая перезаписываемая память данных EEPROM для хранения калибровочной характеристики и различных коэффициентов (отсутствует в SX18AC);
- широкая номенклатура микроконтроллеров, совмещающих на одном кристалле различные виды периферийных устройств и имеющих встроенный аналоговый компаратор.
Схема цифрового измерителя температуры (рис. 3) разработана на основе описанной выше схемы измерения (рис. 1) с применением МК серии AVR. Отличие от оригинала в том, что параллельно цепи разряда конденсатора через измеряемое сопротивление RX добавлена цепь разряда на образцовое сопротивление RО. Сравнение происходит в каждом такте измерения. Это позволяет исключить влияние других параметров схемы (например, стабильности характеристик конденсатора) на точность измерения. Применение в схеме электронных ключей с низким сопротивлением в открытом состоянии (например, полевых транзисторов) позволило уменьшить нижний порог измерения сопротивления почти до нуля.
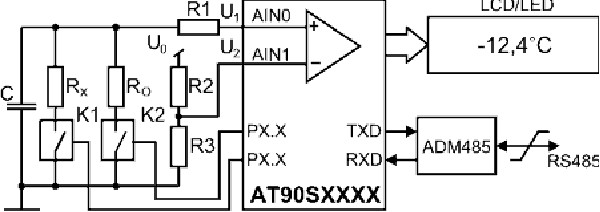
Рис. 3. Структурная схема измерителя температуры на МК типа AT90SXXXX
Для сравнения со схемой измерения на рис. 1 рассмотрим принцип работы полученной схемы цифрового измерителя температуры (рис. 3), временная диаграмма для которого совпадает с диаграммой, приведенной на рис. 2. Перед началом измерения ключевые элементы К1 и К2 находятся в разомкнутом состоянии. Под управлением программы МК (в дальнейшем МК) происходит заряд конденсатора C через резистор R1. Когда напряжение достигает уровня UО, МК включает К2, и начинается разряд конденсатора C через образцовый резистор RО.
Одновременно с началом разряда МК начинает отсчет интервала времени Оґt = t1Ва- t0 (рис. 2). В момент времени t2 напряжение U1 на конденсаторе C сравнивается с напряжением U2, и МК заканчивает отсчет времени. Этот процесс повторяется с измеряемым резистором RX. После того, как получены два значения интервалов времени (DtO для образцового резистора RO и DtX для измеряемого резистора RX), величина измеряемого резистора RX МК вычисляется по следующей формуле:
RX = R0 x ОґtX/ ОґtO
где RXВа- измеряемое сопротивление;ROВа- образцовое сопротивление;ОґtXВа- интервал времени для измеряемого резистора RX;ОґtOВа- интервал времени для образцового резистора RO.
РАЗРАБОТКА СХЕМЫ
1.1 РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ
Согласно заданию схема должна содержать следующие блоки:
- Стабилизатор напряжения (необходим для преобразования напряжения 10-30В, в 5В )
- Микроконтроллер (служит для управления всеми блоками данной схемы)
- Датчик температуры
- Источник тока (необходим для измерения температуры, так как на термометр сопротивления необходимо подавать постоянный ток)
- Источник опорного напряжения (для создания опорного напряжения в АЦП)
- Последовательный интерфейс для связи с ПК (необходим для передачи полученных данных в персональный компьютер)
- Дисплей (предназначен для отображения измеряемых данных)
- Клавиатуру ( по нажатию какой либо кнопки мы можем измерять температуру или просмотреть уже измеренную)
- Супервизор напряжения (вырабатывает общий сигнал сброса)
На рис.4. представлена структурная схема данного устройства.
Рис. 4.
1.2 РАЗРАБОТКА ФУНКЦИАНАЛЬНОЙ СХЕМЫ
Разработку функциональной схемы начнем с последовательного описания каждого блока схемы.
1) Стабилизатор напряжения. На вход данной микросхемы подается напряжение 10-30В с выхода получаем постоянное напряжение 5В. Напряжение 5в необходимо для питания микросхем.
- Микроконтроллер. На данную микросхему также подается земля и питание. Сигнал сброса и на его входы также поступают сигналы от различных устройств таких как датчик температуры, последовательный интерфейс обмена, клавиатура, устройство отображения и др. т.е данная микросхема управляет всеми остальными.
- Датчик температуры. Представлен в виде термометра сопротивления и через должен него протекает постоянный ток, чтобы с выводов снимать изменяющееся напряжение. Напряжение будет изменяться в зависимости от температуры.
- Источник тока. С выхода данной микросхемы снимаем постоянный ток, на вход подается земля и питание.
- Источник опорного напряжения. На вход земля и питание, с выхода получаем постоянное напряжение 2,5В. Опорное напряжение для встроенного АЦП.
- Последовательный интерфейс. Он управляется от микроконтроллера, т.е. на его входы кроме питания и земли, подаются сигналы (RE,R0,DE,DO) по которым происходит считывание или запись данных в компьютер по последовательному порту.
- Клавиатура. С выхода идет код в микроконтроллер, который там обрабатывается и по нему выполняется какая либо операция, на вход подается земля.
- Дисплей. Предназначен для вывода измерений. Выводом данных на экран управляет микроконтроллер, поэтому на входы данного блока также поступают сигналы управления и сами данные с микроконтроллера. На вход также подается земля и питание.
- Супервизор напряжения. На выходе данного блока формируется общий сигнал сброса, на вход подаются земля и питание.
Разрисовка структурной схемы представлена на рис.5.
Рис.5.
1.3 РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ СХЕМЫ
Согласно заданию требуется разработать цифровой медицинский термометр на базе контролера AVR. Я взял микроконтроллер, потому что он имеет достаточное число выводов, напряжение питания от 2,7 до 6 В, есть программируемый полный дуплексный UART (так как мне необходимо организовать последовательную связь с компьютером). Еще в нем имеется сторожевой таймер, внутренняя память и в данном микроконтроллере имеется возможность применить языки высокого уровня для его программирования. Все остальные характеристики приведены в приложении 1.
Супервизор напряжения: я выбрал микросхему mcp100 так как она обладает следующими характеристиками:
- напряжение питания до 5В,
- высокий и низкий уровень сигнала Reset,
- время сигнала Reset 350 мС, потребляемый ток 45мкА,
- температурный диапазон от тАУ40до +85 гр.С
По характеристикам эта схема подходит для моего устройства.
В задании оговорено, что нужно для связи с компьютером использовать интерфейс RS485. Мною была выбрана микросхема МАХ481, у нее напряжение питания тоже 5 В.
Я использовал датчик температуры 100П
Мне необходим жидко кристаллический индикатор со следующими характеристиками
- напряжение питания 5В
- двух строчечный
- со встроенным контроллером, русским алфавитом и наиболее дешевый
Данными свойствами обладает модуль PG1602.
В задании сказано, что диапазон измеряемой температуры от 25 С0 до + 50 С0
и учитывая точность измерения 0,1, действие различных шумов получаем 500 отчетов. Таким образом встроенное 10 разрядное АЦП микроконтроллера AТmega103. В качестве источника опорного напряжения для встроенного АЦП была взята микросхема AD680.
Так как нам необходимо обеспечить 500 отчетов, то через термометр сопротивления должен протекать постоянный ток 20 мА. Следовательно, нам нужен источник постоянного тока. В данной работе источник постоянного тока выполнен по стандартной схеме с использование микросхемы AD680 и постоянного резистора R1= 70 Ом. Расчет резистора был произведен по закону Ома.
Для обеспечения питания микросхем используем стабилизатор напряжения DA37805. На данную микросхему подаем напряжение в диапазоне 10-30В, а с выхода получаем 5В. Здесь диод VD1(КЦ105) используется для того, чтобы не перепутать + и -. Электролитические конденсаторы C2,C4 (К56-100 мкФ) используется для отсечения низкочастотной помехи, а для отсечения высокочастотной помехи параллельно ставим конденсаторы С1,С3 (КМ4-0,1 мкФ). Для питания встроенного АЦП воспользуемся стандартной схемой подключения выводов где R2=100ОМ и С7=10нФ.
РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
2.1 РАЗРАБОТКА СТРУКТУРЫ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
На рис.6 представлена структура программного обеспечения
USR,RxC=1
|
Возврат и сброс флага
|
|
Flagdan=1 и flagpr=1
|
|
Сброс флагов, если пустой буфер
|
|
Рис.6.
В блоке инициализация делаем следующие действия. Для контроллера настройка портов, программирование таймеров, настройка UART, устанавливаем стек и т. д. Для АЦП устанавливаем частоту опроса, режим 16 бит, для ЖКИ устанавливаем разрядность шины данных=8,количество строк =2, шрифт 5х7 точек, направление сдвига курсор в право, запрещаем сдвиг дисплея вместе со сдвигом курсора и т.д.
В блоке тАЬВыдача на дисплей начального приглашениятАЭ выдаем на дисплей следующее сообщение ВлКнопка1-режим ввода, кнопка2 тАУ режим вывода, кнопки 3 - 7 тАУ номера ячеек памяти, кнопка 8 - очистка памятиВ».
Блок опроса флагов: происходит постоянный опрос флагов, если какой-либо флаг установлен, то переходим на соответствующую подпрограмму обработки, которая после окончания своей работы возвращается в то место, откуда была вызвана и сбрасывает соответствующий флаг.
Программа опроса клавиатуры: постоянно опрашивает клавиатуру, и записывает ее состояние в заданный регистр1, как только в этом регистре1 появляется указанное число, она устанавливает Flagklav=1.
Подпрограмма обработки сканкода активизируется, когда Flagklav=1. Сначала проверяем, если действительно в регистре1 число (т.е. устраняем дребезг контактов), анализируем содержание регистра1 и в зависимости от того какое число там записано переходим на ту или иную подпрограмму обработки. В конце подпрограммы сбрасываем Flagklav.
Подпрограмма выдачи на дисплей результата измерения активизируется когда установлен флаг Flagvyvod=1. В зависимости от содержания регистра1, выводим данные из той или иной ячейки памяти.
Подпрограмма записи данных активизируется когда установлен флаг Flagszap=1, и в зависимости от содержания регистра1, записываем данные в ту или иную ячейку памяти.
Подпрограмма приема данных активизируется когда установлен флаг USR,RxC, его устанавливает компьютор приславший данные, выполняем прием даных и конце подпрограммы сбрасываем флаг USR,RxC.
Подпрограмма выдачи данных на компьютер начинает выполнятся когда Flagdan=1 и flagpr=1, далее выполняется выдача данных на компьютер и сброс флагов происходит в том случае, если буфер с данными пуст.
2.2 РАЗРАБОТКА АЛГОРИТМА ОДНОГО ИЗ СОСТАВНЫХ ЧАСТЕЙ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Алгоритм инициализации ЖКИ представлен на рис.7.
Рис.7.
Программа инициализации ЖКИ составленная по данному алгоритму и написанная на языке Ассемблер будет выглядеть так:
initlcd:
rcall del
ldi r25,30h
rcall icom
rcall del
ldi r25,30h
rcall icom
rcall del
ldi r25,30h
rcall icom
ldi r25,38h ; устанавливаем разрядность шины данных=8,
количество строк =2, шрифт 5х7 точек
rcall icom
ldi r25,08h ; включить дисплей, зажечь курсор
rcall icom
ldi r25,01h ; очистить дисплей и установить курсор в нулевую позицию
rcall icom
ldi r25,06h; устанавливаем направление сдвига курсор в право, запретить
сдвиг дисплея вместе со сдвигом курсора
rcall icom
ret
del:
ldi r17,150 ;задержка ~15 ms при кварце 4 МГц
l: ldi r18,200 ;
l1: dec r18 ;
brne l1 ;
dec r17 ;
brne l ;
ret
icom:
in r0,portA
sbi r0,2 ; установит RS в 1
out portA,r0
in r0,portA
сbi r0,1 ; установит W/R в 0
out portA,r0
in r0,portA
sbi r0,0 ; установит Е в 1
out portC,r0
out portB,r25 ;записать в ЖКИ команду из регистра r25
in r0,portA
cbi r0,0 ;сбросить Е в 0
out portA,r0
in r0,portA
sbi r0,1 ; установит W/R в 1
out portA,r0
ret
2.3 НАПИСАНИЕ ПРОГРАММЫ
Текст программы составленный по структурной схеме на рис.6 приведен ниже
.include "Atmega103.inc"
.def flag=r1
.def flagszap =0
.def flagklav =1
.def flagsbr =2
.def flagvyvod =3
.def flagdan =4
.def flagpr =5
.def tmp=r20
.cseg
.org 0H
rjmp main
main:
rcall init ; инициализация контроллера
rcall initlcd ; инициализация ЖКИ
rcall priglashenie ;программа выдачи начального приглашения
m1:
in r30,PinC ; программа опроса клавиатуры и флагов
ldi r31,FEh
cp r30,r31 ;если равно, то переходим на подпрограмму ввода
rcall vvod
ldi r31,FDh
cp r30,r31 ;если равно, то переходим на подпрограмму вывода
rcall vyvod
ldi r31,7Fh
cp r30,r31 ;если равно, то переходим на подпрограмму сброса
rcall sbros
sbrc USR,RxC ; проверяем если бит USR,RxC=1, то переходим на
подпрограмму приема данных от компьютера, если не
равен то пропускаем следующую команду
rcall priem ; подпрограмма приема данных, после своего окончания
работы она скидывает флаг USR,RxC
sbrs flagdan ; проверяем если 0, то переход на m2, если нет, то
пропускаем следующую команду
rjmp m2
sbrs flagpr
rjmp m2
rcall outdan ; подпрограмма выдачи данных на компьютер, после
выполнения выдачи данных сбрасывает флаг данных и
приемника
m2:
rjmp m1
init:
ldi r31,ramend ; указываем стек
out SPL,r31
ldi r31,ffh ; порт B настроить на вывод
out ddrb,r31
ldi r31, 00h ; Port С to ввод
out DDRС, r31
ldi r31,FFh ; подключаем резисторы
out PortС, r31
ldi tmp,00011101 ; инициализация UART
out UCR,tmp ;ldi tmp,25 ;9600 бит/сек при fclk=4МГц
out UBBR,tmp ;
;инициализация встроенного АЦП
set ADCSR.ADEN ;разрешаем работу АЦП
set ADCSR.ADFR ;устанавливаем режим циклического преобразования
ldi ADPS,05H ;устанавливаем тактовую частоту 125 KHz при
;внешнем кварце 4MHz
ret
icom:
in r0,portA
sbi r0,2 ; установит RS в 1
out portA,r0
in r0,portA
сbi r0,1 ; установит W/R в 0
out portA,r0
in r0,portA
sbi r0,0 ; установит Е в 1
out portC,r0
out portB,r25 ;записать в ЖКИ команду из регистра r25
in r0,portA
cbi r0,0 ;сбросить Е в 0
out portA,r0
in r0,portA
sbi r0,1 ; установит W/R в 1
out portA,r0
ret
initlcd:
rcall del
ldi r25,30h
rcall icom ; осуществляем запись команды в регистр ЖКИ
rcall del
ldi r25,30h
rcall icom ; осуществляем запись команды в регистр ЖКИ
rcall del
ldi r25,30h
rcall icom
ldi r25,38h ; устанавливаем разрядность шины данных=8,
количество строк =2, шрифт 5х7 точек
rcall icom ; осуществляем запись команды в регистр ЖКИ
ldi r25,08h ; включить дисплей, зажечь курсор
rcall icom
ldi r25,01h ; очистить дисплей и установить курсор в нулевую позицию
rcall icom
ldi r25,06h ;устанавливаем направление сдвига курсор в право,
запретить сдвиг дисплея вместе со сдвигом курсора
rcall icom
ret
del:
ldi r17,150 ;задержка ~15 ms при кварце 4 МГц
l: ldi r18,200 ;
l1: dec r18 ;
brne l1 ;
dec r17 ;
brne l ;
ret
vvod:
rcall del ;делаем задержку
ldi r31,FEh ;проверяем есть ли действительно в регистре r30
указанные числа(таким образом устраняем дребезг
контактов)
cp r30,r31 ;если равно, то выполняем следующую программу
in r29,PinC ; программа опроса клавиатуры и флагов
ldi r31,FBh
cp r29,r31 ;если равно, то в r28 записываем адрес ячейки памяти
ldi r28,0060h
ldi r31,F7h
cp r29,r31
ldi r28,0070h
ldi r31,EFh
cp r29,r31
ldi r28,0080h
ldi r31,DFh
cp r29,r31
ldi r28,0090h
ldi r31,BFh
cp r29,r31
ldi r28,00A0h
rcall zapis
ret
vyvod:
rcall del ;делаем задержку
ldi r31,FDh ;проверяем есть ли действительно в регистре r30
указанные числа(таким образом устраняем дребезг
контактов)
cp r30,r31 ;если равно, то выполняем следующую программу
in r29,PinC ;программа опроса клавиатуры и флагов
ldi r31,FBh
cp r29,r31 ; если равно, то в r28 записываем адрес ячейки
ldi r28,0060h
ldi r31,F7h
cp r29,r31
ldi r28,0060h
ldi r31,ЕFh
cp r29,r31
ldi r28,0060h
ldi r31,DFh
cp r29,r31
ldi r28,0060h
ldi r31,BFh
cp r29,r31
ldi r28,0060h
RCALL VYVOD1
ret
zapis:
nop ;задержка
nop
nop
nop
MOV EEARH,00H ;старший байт адреса ячейки
MOV EEARL,R28 ;младший байт адреса ячейки
nop ;задержка
nop
nop
nop
MOV EEDR, ADCL ;ввод данных с регистра данных АЦП
SET EERC,2 ;разрешение записи
SET EERC,1 ;запись
RET
VYVOD1:
MOV R27,#00H
MOV EEARH,00H
MOV EEARL,R28
SET EERC,0 ;разрешение чтения
MOV R27,EEDR
Rcall VYVODZKI ;переход к процедуре вывода данных на ЖКИ
RET
ЗАКЛЮЧЕНИЕ
В данной курсовой работе был разработан цифровой медицинский термометр с памятью на 5 измерений. Здесь использовался датчик температуры 10П. Данная схема имеет возможность подключения и других датчиков температуры. Устройство построено на контроллере AVR (Atmega103).
В работе были учтены все требования. В частности нам нужно было измерять температуру с точностью 0,1, в связи с этим использовался внутренний аналого-цифровой преобразователь (10-ти разрядный).
СПИСОК ЛИТЕРАТУРЫ
- Геращенко О.А., Гордов А.Н., Лах В.И. и др. Температурные измерения: Справочник. Киев: Изд. "Наукова думка", 1984. 496 С.
- Бокуняев А.А., Борисов Н.М., Варламов Р.Г. и др. Справочная книга радиолюбителя-конструктора. Под ред. Чистякова Н.И. М.: Радио и связь, 1990. 624 С: ил.
- Современные микроконтроллеры: Архитектура, средства проектирования, примеры применения, ресурсы сети Интернет. "Телесистемы". Под. ред. Коршуна И.В.; Составление пер. с англ. и литературная обработка Горбунова Б.Б. М: Изд. "Аким", 1998. 272 С: ил.
- Лаптев В.В. Цифровой измеритель. Свидетельство на полезную модель №13698 от 09.11.1999 г.
- I-7013, I-7033. User manual. Copyright 1999. ICP DAS.
- ADAM-4013. User manual. Copyright 1994. Advantech.
- Все необходимое для автоматизации на базе PC: Каталог. Прософт. 1998 г.
ПРИЛОЖЕНИЕ 1
В данном приложении приведено описание микроконтроллера ATmega103
8-ми разрядный КМОП микроконтроллер с загружаемой Flash ПЗУ
- AVR RISC архитектура тАУ архитектура высокой производительности и малого потребления
- 120 команд, большинство которых выполняются за один машинный цикл
- 4 Кбайта Flash ПЗУ программ, с возможностью внутрисистемного программирования и загрузки через SPI последовательный канал, 1000 циклов стирания/запись
- 256 байт ЭСППЗУ данных, с возможностью внутри системной загрузки через SPI последовательный канал, 100000 циклов стирания/запись
- 4 Кбайта встроенного RAM
- 32*8 регистра общего назначения
- 32 программируемых линий ввода/вывода
- 16 тАУ разрядный и 32 тАУ разрядный формат команд
- Диапазон напряжений питания от 4 до 6 В
- Полностью статический прибор работает при тактовой частоте от 0 до 6 МГц
- Производительность до 6 MIPS при частоте 8МГц
- 8 тАУ разрядный и 16 тАУ разрядный таймеры/счетчики с общим прескалером
- Сдвоенный ШИМ с 8,9 или 10 разрядным разрешением
- Программируцемые последовательные UART и SPI интерфейсы
- Два внешних и десять внутренних источников сигнала прерывания
- Программируемый сторожевой таймер с собственным встроенным генератором
- Встроенный аналоговый компаратор
- Режимы энергоснабжения: Idle, Power Save и Power Down
- Блокировка режима программирования
- Программная установка тактовой частоты
- Встроенная система реального времени с отдельным генератором
КМОП микроконтроллер ATmega103 реализован по AVR RISC архитектуре (Гарвардская архитектура с разделенной памятью и разделенными шинами для памяти программ и данных) и совместим по исходным кодам и тактированию с 8-разрядными микроконтроллерами семейства AVR (AT90SXXX). Выполняя команды за один тактовый цикл, прибор обеспечивает производительность, приближающуюся к 1 МГц. AVR ядро объединяет мощную систему команд с 32 8 разрядными регистрами общего назначения и конвейерного обращения к памяти программ. Шесть из 32 регистров могут использоваться как три 16 тАУ разрядных регистра указателя при косвенной адресации пространства памяти. Выполнение относительных переходов и команд вызова реализуются с прямой адресацией всех 2К адресного пространства. Адреса периферийных функций содержатся в пространстве памяти ввода/вывода. Архитектура эффективно поддерживает как языки высокого уровня, так и программы на языках ассемблера.
Микроконтроллер ATmega103 содержит: 4Кбайта загружаемого ПЗУ(2К*16), 256 байтов СОЗУ и 256 байтов ЭСППЗУ, с возможностью наращивания памяти данных до 64К за счет внешних ИС СОЗУ, 32 линии ввода/вывода общего назначения, 8-ми разрядный таймер/счетчик и 16 разрядный таймер/счетчик с режимом захвата и сравнения, систему внутренних и внешних прерываний, программируемый последовательный UART, программируемый сторожевой таймер с внутренним генератором, последовательный порт с интерфейсом SPI для внутри системной загрузки и для связи с внешними устройствами. Программно управляются два режима энергоснабжения. В пассивном режиме ЦПУ останавливается, но СОЗУ, таймеры/счетчики, порт SPI, сторожевой таймер и система прерываний остаются активными. В стоповом режиме останавливается тактовый генератор и, следовательно останавливаются все функции, пока не поступит сигнал внешнего прерывания или аппаратного сброса, но сохраняется содержимое регистров.
Встроенная загружаемая Flash память обеспечивает внутрисистемное программирование с использование интерфейса SPI или с использование стандартных программаторов энергонезависимой памяти.
Потребление прибора в активном режиме составляет 3,5 мА и в пассивном режиме 1мА. В стоповом режиме, при работающем сторожевом таймере, микроконтроллер потребляет 50 мкА.
Объединение на одном кристалле усовершенствованного 8-ми разрядного RISC ЦПУ с загружаемой Flash ПЗУ позволило фирме создать мощный микроконтроллер, обеспечивающий высокую гибкость и экономичность в использовании прибора в качестве встраиваемого контроллера.
Вместе с этим смотрят:
Разработка микропроцессорного устройства цифрового фильтраРазработка печатного узла портативного частотомераРазработка схемы радиоприемникаРазработка схемы электронного эквалайзера