Теоретические основы радиолокации
Министерство образования Украины
Национальный авиационный университет

Теоретические основы радиолокации
Выбор и обоснование тактико-технических характеристик РЛС. Разработка структурной
схемы
Выполнил студент Принял:
Группы: 404 Соколов П.М.
Факультета радиолэектроники
Черныш Александр Александрович
Киев 2002
Содержание:
1. Задание: 3
2. Введение 4
3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 6
3.1. Обоснование, выбор и расчет тактических характеристик РЛС 6
3.1.1. Максимальная дальность действия Rmax 6
3.1.2. Минимальная дальность действия РЛС Rmin 6
3.1.3. Разрешающая способность РЛС по дальности ΔDR 7
3.1.4. Разрешающая способность РЛС по азимуту ΔDαa на средней дальности. 7
3.1.5. Период обзора Тобз. 8
3.1.6. Разрешающая способность по углу места. 8
3.1.7. Секторы обзора по азимуту ΔDαaобзВаи по углу места ΔDβbобз. 8
3.1.8. Точность определения координат по дальности Grn. 8
3.1.10. Вероятность правильного обнаружения D: 9
3.1.11. Вероятность ложной тревоги F. 10
3.2. Обоснование, выбор и расчет технических характеристик РЛС 10
3.2.1. Режим работы РЛС. 10
3.2.2. Рабочая длина волны λl. 10
3.2.3. Частота повторения зондирующих импульсов Fn. 10
3.2.4. Длительность зондирующего импульса τtu. 10
3.2.5. Форма и ширина диаграммы направленности. 11
3.2.6. Необходимый диаметр антенны 11
3.2.7. КНД и усиления антенны, эффективная площадь антенны. 11
3.2.8. Скорость вращения антенны Ойа. 12
3.2.9. Количество импульсов в пакете Nu. 12
3.2.10. Чувствительность приемника Pnmin. 12
3.2.11. Оцениваем эффективную отражающую поверхность цели. 13
3.2.12. Влияние затухания αa. 13
3.2.13.Импульсная мощность излучения Pu 15
3.2.14. Средняя мощность излучения Pср передатчика. 15
4. Описание обобщённой структурной схемы РЛС 15
5. Структурная схема метеонавигационных радиолокаторов типа ВлГрозаВ». 17
6. Заключение 20
7. Список использованной литературы: 21
1. Задание:
Необходимо рассчитать тактико-технические характеристики радиолокационной станции, используя нормы и рекомендации ICAO, государственные и международные стандарты, выбрать недостающие технические и тактические характеристики, обосновать их выбор, а также разработать структурную схему РЛС.
Исходные данные:
- Период обзора тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.Тобз=5с
- Сектор обзора в горизонтальной плоскости,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.ΔDαaобзВа=ВаВ±1000;
- Ширина ДНА РЛС в вертикальной плоскости,тАжтАжтАжтАжтАжтАжтАж.тАжтАжтАжΔDβb=350;
- Диаметр пятна ЭЛТ, тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжdn=0,5мм;
- Максимальная дальность действия РЛС,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжRmaxВа=Ва400В·103м;
- Длительность импульса,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж..τtuВа=Ва1,5⋅Ч10-6c;
- Ширина ДНА в горизонтальной плоскости,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.θqВа=Ва3°В°;
- Вероятность правильного обнаружения,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжDВа=Ва0,5;
- Вероятность ложной тревоги,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.FВа=Ва10-9;
- Коэффициент шума,.тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.NшВа=Ва10dB;
- Эффективная отражающая поверхность цели,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.SэфВа=Ва40м2;
- Диаметр экрана ЭЛТ,тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжDэВа=Ва0,25м.
ДНА тАУ диаграмма направленности антенны.
2. Введение
Радиолокация тАУ область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются любые неоднородности электрических параметров среды (диэлектрической и магнитной проницаемостей, проводимости), в которой распространяется первичная волна. Сюда относятся летательные аппараты (самолеты, вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег, град, облака и т. д.), речные и морские суда, наземные объекты (строения, автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и т. п. Особым видом радиолокационных целей являются астрономические объекты.
Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения.
- Радиолокация с пассивным ответом, основанная на том, что излучаемые РЛС колебания тАУ зондирующий сигнал тАУ отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала. Такой вид наблюдения иногда называют также активной радиолокацией с пассивным ответом.
- Радиолокация с активным ответом, именуемая активной радиолокацией с активным ответом, характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специального ответчика тАУ ретранслятора. При этом заметно повышается дальность и контрастность радиолокационного наблюдения.
- Пассивная радиолокация основана на приеме собственного радиоизлучения целей, преимущественно миллиметрового и сантиметрового диапазонов. Если зондирующий сигнал в двух предыдущих случаях может быть использован как опорный, что обеспечивает принципиальную возможность измерения дальность и скорости, то в данном случае такая возможность отсутствует.
Систему РЛС можно рассматривать как радиолокационный канал наподобие радиоканалов связи или телеметрии. Основными составными частями РЛС являются передатчик, приемник, антенное устройство, оконечное устройство.
Большинство РЛС с импульсной модуляцией имеет одну антенну, снабженную специальным антенным переключателем для перехода из режима передачи в режим приема и наоборот.
Передатчик РЛС вырабатывает высокочастотные колебания, которые модулируются по амплитуде, частоте или фазе иногда весьма сложным образом. Эти колебания подаются в антенное устройство и образуют зондирующий сигнал. Наибольшее применение находит зондирующий сигнал в виде последовательности равноотстоящих по времени коротких радиоимпульсов. Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с незатухающими гармоническими колебаниями могут использоваться частотно-модулированные и др.
Излучаемые колебания нельзя считать радиолокационным сигналом, так как они никакой информации о цели не несут. После того, как электромагнитная волна, падающая на цель, вызывает в ее теле вынужденные колебания электрических зарядов, цель, подобно обычной антенне создает свое электромагнитное поле. Это поле в дальней зоне представляет собой вторичную, то есть отраженную волну, создающую в РЛС радиолокационный сигнал, который является носителем информации о цели. Так амплитуда сигнала в определенной степени характеризует размеры и отражающие свойства цели, время запаздывания относительно начала излучения зондирующего сигнала используется для измерения дальности, а частота колебаний благодаря эффекту Доплера несет информацию о радиальной скорости цели. Поляризационные параметры отраженной волны могут также быть использованы для оценки свойств цели. Наконец, направление прихода отраженной волны содержит информацию об угловых координатах цели.
Приемник РЛС необходим для оптимального выделения полезного сигнала из помех (так называемая первичная обработка сигнала). Оконечное (выходное) устройство служит для представления радиолокационной информации в нужной потребителю форме. Если потребителем является человек-оператор, то используется визуальная индикация. Для потребителя в виде вычислительного устройства непрерывного действия оконечным является устройство автоматического сопровождения цели по измеряемому параметру (дальность, угловые координаты, скорость), и полезная информация выдается в виде напряжений или токов, функционально связанных с этими параметрами. Если же оконечным устройством является ЭВМ, то радиолокационная информация преобразовывается в двоичный код. При этом в ЭВМ происходит дальнейшая, так называемая вторичная обработка сигнала.
Важной составной частью радиолокационного канала, как и любого радиоканала, являются радиопомехи. Внутренние шумы вызывают подавление полезного сигнала, а также появление ложного сигнала и вносят ошибки в измерение координаты. Наряду с этим флуктуации скорости распространения радиоволн в атмосфере, а также случайное изменение их траектории вследствие рефракции следует рассматривать как помехи. Такое же действие оказывают пассивные помехи тАУ источники ложных отражений (например, отражения от земной поверхности при наблюдении целей). Другим источником помех являются флуктуации центра масс движущейся цели относительно траектории движения. Источники мешающих радиоизлучений образуют активные помехи (против РЛС военного назначения могут специально создаваться организованные активные помехи, возможны также организованные пассивные помехи).
В условиях большой насыщенности радиосредствами заметное влияние могут оказывать активные взаимные помехи.
Главные этапы радиолокационного наблюдения тАУ это обнаружение, измерение, разрешение и распознавание.
Обнаружением называется процесс принятия решения о наличии целей с допустимой вероятностью ошибочного решения.
Измерение позволяет оценить координаты целей и параметры их движения с допустимыми погрешностями.
Разрешение заключается в выполнении задач обнаружения и измерения координат одной цели при наличии других, близко расположенных по дальности, скорости и т.Вад. Наконец
Распознавание дает возможность установить некоторые характерные признаки цели: точечная она или групповая, движущаяся или групповая и т. д.
Радиолокационная информация, поступающая от РЛС, транслируется по радиоканалу или по кабелю на пункт управления. Процесс слежения РЛС за отдельными целями автоматизирован и осуществляется с помощью ЭВМ.
Навигация самолетов по трассе обеспечивается посредством таких же РЛС, которые применяются в УВД. Они используются как для контроля выдерживания заданной трассы, так и для определения местоположения в процессе полета.
Для выполнения посадки и ее автоматизации наряду с радиомаячными системами широко используются РЛС посадки, обеспечивающие слежение за отклонением самолета от курса и глиссады планирования.
В гражданской авиации используют также ряд бортовых радиолокационных устройств. Сюда, прежде всего, относится ботовая РЛС для обнаружения опасных метеообразований и препятствий. Обычно она же служит для обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам.
3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции
3.1. Обоснование, выбор и расчет тактических характеристик РЛС
3.1.1. Максимальная дальность действия Rmax
Максимальная дальность действия задается тактическими требованиями и зависит от многих технических характеристик РЛС, условий распространения радиоволн и характеристик целей, которые в реальных условиях использования станций подвержены случайным изменениям. Поэтому максимальная дальность действия является вероятностной характеристикой.
Уравнение дальности в свободном пространстве (т. е. без учета влияния земли и поглощения в атмосфере) для точечной цели устанавливает связь между всеми основными параметрами РЛС.
 (1)
(1)
где:
Pu - мощность излучения;
Da - коэффициент направленного действия антенны;
Sa - эффективная площадь антенны;
Sэф - эффективная отражающая поверхность цели;
Pnmin - чувствительность приемника.
Максимальная дальность действия РЛС задана в условии и равна:
Rmax = 450В·103 м.
3.1.2. Минимальная дальность действия РЛС Rmin
Минимальная дальность обнаружения станции зависит от пределов работы антенной системы по углу места. Она различна для разных частот и определяет величину мертвой зоны. В наземных РЛС при малых углах места реальное значение Rmin ограничивается влиянием местных предметов, определяющих углы закрытия, которые, в свою очередь, ограничивают возможность наблюдения низколетящих целей.
Если антенная система не вносит ограничений, то минимальная дальность действия РЛС определяется длительностью импульса τtu и временем восстановления антенного переключателя τtb.
 (2)
(2)
 0,5тИЩ3тИЩ108тИЩ(1,5тИЩ10-6+0,2тИЩ1,7тИЩ10-6) =306 м
0,5тИЩ3тИЩ108тИЩ(1,5тИЩ10-6+0,2тИЩ1,7тИЩ10-6) =306 м
где:
с - скорость распространения электромагнитной волны в вакууме, cВа=Ва3тИЩ108 м⋅Чc-1;
ПДb- время восстановления антенного переключателя, τtbВа=Ва0.2⋅Чτtu.
3.1.3. Разрешающая способность РЛС по дальности ΔDR
Разрешающая способность по дальности - минимальная дальность между двумя целями, имеющими угловые одинаковые координаты, при которой метки от них на экране индикатора видны раздельно.
Потенциальная разрешающая способность по дальности вычисляется по формуле:

 (3)
(3)
Для определения реальной разрешающей способности по дальности необходимо учесть параметры ЭЛТ индикатора:
 (4)
(4)
где:
dn - диаметр пятна, dnВа=Ва0.5мм = 5.0⋅Ч10-4 м;
L - длина развертки.

 0.15⋅м
0.15⋅м
где:
Dэ - диаметр ЭЛТ, DэВа=Ва0.25 м.
Но, т.к. мы имеем секторную развёртку с сектором обзора по азимуту ΔDαaобзВа=Ва±В±100°В°, смещаем центр экрана вниз, что увеличивает коэффициент использования экрана.
Реальная разрешающая способность по дальности будет иметь вид:
 1.755⋅103 м
1.755⋅103 м
3.1.4. Разрешающая способность РЛС по азимуту ΔDαa на средней дальности.
Разрешающая способность по азимуту определяется выражением:
 (5)
(5)
где:
θq - ширина диаграммы направленности по половинной мощности в горизонтальной плоскости;
ΔDαau тАУ разрешающая способность по азимуту индикаторного устройства, зависящая от линейного размера азимутальной развертки и диаметра пятна ЭЛТ.


 3.38⋅0
3.38⋅0
3.1.5. Период обзора Тобз.
Периодом обзора РЛС Тобз называется интервал времени, необходимый для облучения всех точек зоны обзора станции, и определяется выражением:
 (6)
(6)
где:
Numin тАУ минимальное число отраженных от цели импульсов, необходимых для обнаружения цели с заданной вероятностью;
ΔDαaобз тАУ сектор обзора в горизонтальной плоскости, ΔDαaобзВа=Ва200°В°;
Fn тАУ частота повторения зондирующих импульсов;
θq - ширина диаграммы направленности антенны в горизонтальной плоскости.
Частота повторения зондирующих импульсов определяется по формуле:
 (7)
(7)
где:
Кз тАУ коэффициент запаса, учитывающий влияние индикатора, КзВа=Ва1,2.
 277.778⋅Гц
277.778⋅Гц
 5⋅c
5⋅c
3.1.6. Разрешающая способность по углу места.
Разрешающая способность по угловой координате (направлению) численно характеризуется минимальным углом (по азимуту или углу места) между направлениями на две равноудаленные относительно РЛС цели, при котором еще возможно их раздельное наблюдение.
В данном случае не имеет смысла говорить об разрешающей способности по углу места, т.к. мы проектируем обзорную РЛС, антенна которой имеет косекансную диаграмму направленности и не имеет разрешающую способность по углу места.
3.1.7. Секторы обзора по азимуту ΔDαaобзВаи по углу места ΔDβbобз.
Секторы обзора по азимуту и по углу места задаются в техническом задании. В данном случаи
сектор обзора по азимуту равен:тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.ΔDαaобзВа=Ва±В±100°В°;
сектор обзора по углу места равен:тАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАжтАж.тАжтАжΔDβbобзВа=Ва35°В°.
3.1.8. Точность определения координат по дальности Grn.
Точность определения дальности зависит от точности измерения запаздывания отраженного сигнала, ошибок из-за неоптимальности обработки сигнала, от наличия неучтенных запаздываний сигнала в трактах передачи, приема и индикации, от случайных ошибок измерения дальности в индикаторных устройствах.
Ошибки в индикаторных устройствах обуславливаются нестабильностью масштабных меток и ошибками считывания.
Потенциальная точность измерения дальности РЛС вычисляется по формуле:
 (8)
(8)
где:
τtu тАУ длительность импульса;
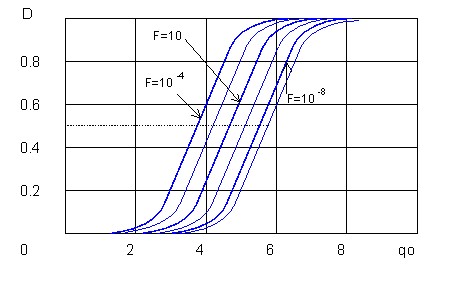
qmin тАУ минимальное отношение сигнал-шум по напряжению, определяемое по характеристикам обнаружения (Рис.1) qmin=5.8
Из-за отсутствия внутриимпульсной модуляции Ксж=1.
 24.805⋅м
24.805⋅м
3.1.9. Точность определения координат по азимуту Gαan.
Систематические ошибки при измерении азимута могут возникнуть при неточном ориентировании антенной системы РЛС и вследствие несоответствия между положением антенны и масштабной электрической шкалой азимута.
Случайные ошибки измерения азимута цели обуславливаются нестабильностью работы системы вращения антенны, нестабильностью схем формирования отметок азимута, а также ошибками считывания.
Потенциальная ошибка измерения азимута определяется выражением:  (9)
(9)
 0.285
0.285
3.1.10. Вероятность правильного обнаружения D:
Вероятность правильного обнаружения тАУ вероятность принятия решения о наличии цели при условии, что цель действительно есть.
Вероятность правильного обнаружения задана в техническом задании и равна DВа=Ва0,5.
3.1.11. Вероятность ложной тревоги F.
Вероятность ложной тревоги тАУ вероятность принятия решения о наличии цели при ее отсутствии.
Вероятность ложной тревоги задана в техническом задании и равна FВа=Ва10-9.
3.2. Обоснование, выбор и расчет технических характеристик РЛС
3.2.1. Режим работы РЛС.
Проектируемая радиолокационная станция работает в импульсном режиме. Сигнал тАУ некогерентные прямоугольные импульсы.
3.2.2. Рабочая длина волны λl.
Диапазон волн, применяемый в радиолокационной технике, лежит в области метровых, дециметровых, сантиметровых и миллиметровых волн. От длины волны РЛС зависят размеры антенной системы при требуемых значениях диаграммы направленности и коэффициента направленного действия антенны. Применение более коротких волн при тех же размерах антенны позволяет улучшить разрешающую способность и точность отсчета угловых координат. При выборе длины волны необходимо учитывать поглощающие и рассеивающие действия гидрометеоров и атмосферы, возможность получения необходимой мощности от передатчика и обеспечения требуемой чувствительности приемника.
В диапазонах сантиметровых и особенно миллиметровых волн интенсивное поглощение электромагнитных колебаний вызывает нежелательное уменьшение дальности действия станции. Кроме того, гидрометеоры в этих диапазонах могут являться источником интенсивного отражения, затрудняющего и полностью исключающего наблюдение целей.
Выбор длины волны должен производиться с учетом особенностей РЛС и влияния длины волны на ее тактические характеристики.
Так, например, РЛС дальнего обнаружения, от которой не требуется очень высокой разрешающей способности и большой точности измерения угловых координат, может работать в диапазоне дециметровых или даже метровых волн.
Наоборот, для РЛС ближнего действия, как правило, важны высокая точность отсчета угловых координат и разрешающая способность. В таких случаях выгодно использовать сантиметровые, а иногда и миллиметровые волны, поскольку при общем небольшом радиусе действия станции затухание электромагнитных волн в атмосфере будет сказываться еще не слишком сильно.
Принимая во внимание все вышесказанное, выберем рабочую длину волны λl=0.03Вам.
3.2.3. Частота повторения зондирующих импульсов Fn.
Для однозначного определения целей на заданных расстояниях максимальная частота повторения Fn зондирующих импульсов должна удовлетворять условию:
 (10)
(10)
где:
Кз=1,2 тАУ коэффициент запаса.
 277.778⋅Гц
277.778⋅Гц
3.2.4. Длительность зондирующего импульса τtu.
Основным соображением по выбору длительности импульса является обеспечение заданной разрешающей способности по дальности. От длительности импульса также зависит минимальная дальность действия Rmin. Уменьшение длительности импульсов приводит к уменьшению эффективной площади от распределенных объектов.
Длительность зондирующего импульса задана в условии и равна: τtuВа=Ва1,7⋅Ч10-6 c.
3.2.5. Форма и ширина диаграммы направленности.
При выборе формы диаграммы направленности необходимо учитывать следующие требования:
- наиболее целесообразное использование мощности излучения (пример косекансной диаграммы направленности);
- обеспечение требуемой разрешающей способности по угловым координатам и точности их определения;
- обзор установленного сектора пространства или участка поверхности в заданное время должен производиться без пропуска в приеме отраженных сигналов.
Таким образом, требования оказываются в достаточной мере противоречивыми. Поэтому часто приходится искать компромиссное решение.
Для удобства обычно рассматривают отдельно диаграмму направленности в горизонтальной плоскости и диаграмму направленности в вертикальной плоскости. При этом обращают внимание на ширину диаграммы направленности θq.
Ширина диаграммы направленности антенны влияет на дальность радиолокационного наблюдения. По мере сужения диаграммы направленности антенны увеличивается ее коэффициент направленного действия и соответственно возрастает максимальная дальность действия РЛС.
Точность измерения угловых координат также зависит от ширины диаграммы направленности в плоскости пеленгования. С ростом ширины диаграммы ошибка увеличивается. При выборе величины θq необходимо учитывать требования в отношении разрешающей способности по направлению ΔDαa. Чем шире диаграмма направленности, тем труднее наблюдать цели, находящиеся на близком расстоянии.
Принятая в РЛС диаграмма направленности зависит от метода обзора пространства и способа измерения координат. В плоскости измерения угловых координат целей диаграмму направленности делают возможно более узкой.
Ширина диаграммы направленности в горизонтальной плоскости равна:
θqВа=Ва3°В°, в вертикальной плоскости косекансквадратная диаграмма направленности φj=35°В°.
θq0,5=θq/1.5=20
3.2.6. Необходимый диаметр антенны
 dА
dА
Принимаем dА=0.76м , и уточняем ширину луча.

 рад
рад
3.2.7. КНД и усиления антенны, эффективная площадь антенны.
КНД - коэффициент направленного действия антенны.

 =5490
=5490

 =5215
=5215

 =0,448 м2
=0,448 м2
GA тАУ коэффициент усиления антенны;
SА тАУ эффективная площадь антенны;
О· тАУ КПД антенны.
3.2.8. Скорость вращения антенны Ойа.
Скорость вращения антенны выбирают с учетом требований в отношении сокращения времени обзора и надежности наблюдения сигналов.
При заданных значениях ширины диаграммы направленности θq, частоты следования импульсов Fn и сектора обзора ΔDαaобз скорость вращения антенны определяется выражением:
 (11)
(11)
 0.417⋅c-1
0.417⋅c-1
 (12)
(12)
 40 град ⋅ c-1
40 град ⋅ c-1
3.2.9. Количество импульсов в пакете Nu.
Количество импульсов в пакете зависит от ширины диаграммы направленности в горизонтальной плоскости θq, скорости вращения антенны ΩW и частоты следования зондирующих импульсов Fn:
 (13)
(13)
 20
20
3.2.10. Чувствительность приемника Pnmin.
Приемное устройство осуществляет обнаружение сигналов. Обнаружение сигналов при оптимальной фильтрации обычно сводится к следующим операциям:
- оптимальная фильтрация каждого импульса пакета;
- амплитудное детектирование;
- синхронное интегрирование видеосигналов;
- испытание суммарного сигнала на порог.
Первые две операции обычно выполняет приемное устройство, а остальные тАУ выходное. Применение оптимальной обработки сигналов приводит к уменьшению пороговой мощности. Под пороговой мощностью радиолокационных сигналов понимают минимальную мощность сигнала на его входе, при которой обеспечивается прием и обнаружение отраженных сигналов с заданными вероятностями правильного обнаружения и ложной тревоги.
Величина пороговой мощности радиолокационных сигналов зависит от заданных значений вероятностей правильного обнаружения D и ложной тревоги F, параметров радиолокационных сигналов, времени наблюдения и вида обработки радиолокационных сигналов.
Пороговая мощность является реальной чувствительностью приемника. Она определяется выражением:
 (14)
(14)
где:
k тАУ постоянная Больцмана, kВа=Ва1.380662⋅Ч10-23J⋅ЧK-1;
Т тАУ абсолютная температура, ТВа=Ва300К;
ΔDf тАУ полоса пропускания приемника;
Nш тАУ коэффициент шума приемника;
mp тАУ коэффициент различимости.
Полоса пропускания приемника определяется по формуле:

где:
а тАУ коэффициент, учитывающий степень искажения сигнала, проходящего через приемник, аВа=Ва1.37
 8.059⋅105 ⋅ Гц
8.059⋅105 ⋅ Гц
Коэффициент шума приемника задан в условии и равен NшВа=Ва10 dB.
Коэффициент различимости определяется из выражения:

 1,297
1,297
Чувствительность приемника равна:

 4,327⋅10-14 ⋅Вт
4,327⋅10-14 ⋅Вт
или в dB/мВТ
 113.6 dB/мВТ
113.6 dB/мВТ
где:
РоВа=Ва10-3Вт тАУ исходный отсчетный уровень.
3.2.11. Оцениваем эффективную отражающую поверхность цели.
Удельная эффективная отражающая поверхность цели:

Рассеивающий объём на максимальной дальности:

 9,266
9,266
Полная эффективная отражающая поверхность цели:

 4,82 105 м2
4,82 105 м2
3.2.12. Влияние затухания αa.
Затухание радиоволн в атмосфере обусловлено поглощением их энергии свободными молекулами кислорода и водяного пара, а также взвешенными частицами тАУ пылинками и каплями воды. Кроме того, происходит рассеяние радиоволн жидкими и твердыми частицами, которые вызывают эффект, аналогичный поглощению энергии.
Влияние постоянного затухания αa на максимальную дальность действия РЛС определяется выражение:
 (16)
(16)
где:
R`max тАУ дальность действия РЛС с учетом затухания;
Rmax тАУ дальность действия РЛС без учета затухания;
αa - коэффициент затухания, зависящий от длины волны и от интенсивности осадков или от водности облаков.
Например, если на трассе идет дождь интенсивностью 15 мм/час, то для длины волны λlВа=Ва3 см коэффициент затухания αaВа=Ва0,03 dB/kм.
Уравнение (16) является трансцендентным. Решить его можно графически. Для облегчения задачи целесообразно путем логарифмирования обеих частей привести уравнение к виду:
 (17)
(17)


Зависимость αa⋅ЧRmaxВа=Ваφj(γg) представлена на рис. 2:
Рис 2.относительное уменьшение дальности за счёт затухания в атмосфере
γgВа=Ва0.477
Откуда определяется дальность действия РЛС с учетом затухания:
 214,65⋅kм
214,65⋅kм
f(0.477)=13
,5
Для того, чтобы РЛС в плохую погоду действовала на расстояние  450⋅kм, необходимо рассчитывать её на расстояние:
450⋅kм, необходимо рассчитывать её на расстояние:

 943,4км
943,4км
3.2.13.Импульсная мощность излучения Pu
В зависимости от назначения станции мощность излучаемых импульсов выбирают от единиц киловатт до тысяч киловатт. Мощность излучения рассчитывают в соответствии с основным уравнением радиолокации, откуда:
 (15)
(15)
где:
Da тАУ коэффициент направленного действия антенны;
Sa тАУ эффективная площадь антенны;
L0 тАУ учитывает потери в системе (L0=5)
Мощность излучения передатчика РЛС равна:

 480 ⋅kВТ
480 ⋅kВТ
3.2.14. Средняя мощность излучения Pср передатчика.

 226 Вт
226 Вт
4. Описание обобщённой структурной схемы РЛС
Структурная схема РЛС с визуальной индикацией цели изображена на рис3.
Рис. 3. Структурная схема импульсной РЛС
Синхр. тАУ синхронизатор; ИМ тАУ импульсный модулятор; СВЧ Ген. тАУ генератор СВЧ; АП тАУ антенный переключатель; ГМИ тАУ генератор масштабных импульсов; ПРМ тАУ приемник; ГР тАУ генератор развертки; ЭЛТ тАУ электронно-лучевая трубка; ССП тАУ сильсинно-следящая передача; МВА тАУ механизм вращения антенны.
Данные по параметрам РЛС можна найти в сводной таблице 1.
Антенна РЛС имеет веерообразную диаграмму направленности, то есть узкую в горизонтальной плоскости (шириной в несколько градусов или долей градуса θq=30), и достаточно широкую (десятки градусов ΔDβbобз=350) в вертикальной плоскости. При вращении такая антенна обеспечивает не только требуемый обзор в вертикальной и горизонтальной плоскостях, но и измерение азимута.
Этот принцип сохраняется как для обзора воздушного пространства (наземная РЛС), так и для обзора земной поверхности (бортовая РЛС). Для визуальной индикации двух координат цели следует использовать двухмерный индикатор кругового обзора (ИКО) с яркостной отметкой цели, в котором обычно применяются ЭЛТ с магнитным управлением. В нашем случае используем секторный индикатор для увеличения коэффициента использования антенны. Импульсные сигналы с выхода приемника подается на управляющий электрод ЭЛТ, и увеличивают яркость экрана во время их появления.
Развертка дальности осуществляется с помощью отклоняющей катушки, создающей магнитное поле, которое равномерно перемещает электронный луч от центра экрана ЭЛТ к его краю. Азимутальная развертка получается с помощью сельсинно-следящей передачи (ССП), которая обеспечивает синфазное с вращением антенны по азимуту вращение радиальной развертки вокруг центра.
Синхронизатор РЛС вырабатывает периодическую последовательность импуль-сов с периодом Tn=3,6 10-3, которые воздействуют одновременно (либо с некоторым постоянным запаздыванием) на модулятор, генератор развертки дальности и генератор масштабных импульсов. Импульсный модулятор вырабатывает модулирующие видеоимпульсы длительностью τtu=1,7 10-6, воздействующие на генератор СВЧ. Последний вырабатывает радиоимпульсы примерно такой же длительности.
Генератор СВЧ формирует периодическую последовательность радиоимпульсов, излучаемую антенной в виде зондирующего сигнала. Отраженный импульс появляется на входе приемника через интервал времени tз. На выходе приемника образуются видеоимпульсы, смешанные с шумом, которые подаются на управляющий электрод ЭЛТ.
Генератор развертки дальности вырабатывает в отклоняющей катушке пилообразно изменяющийся ток. При этом электронный луч совершает равномерное движение вдоль радиуса ЭЛТ, который в свою очередь вращается вместе с антенной. Такая развертка луча на экране ЭЛТ называется радиально-круговой. Она создает на экране изображение (часто именуемое растром) в виде тесно примыкающих друг к другу радиусов.
Генератор масштабных импульсов вырабатывает серию импульсов, которые могут быть периодическими, либо иметь вид пачек, действующих в пределах длительности прямого хода развертки. Такие импульсы можно формировать, например, с помощью генератора ударного возбуждения. Часть применяются масштабные импульсы отрицательной полярности, подаваемые на катод ЭЛТ (это облегчает развязку выходных цепей приемника и генератора масштабных импульсов).
Механизм формирования изображения на экране ЭЛТ описан ниже. При вращении антенны, когда край диаграммы направленности совпадает с направлением на цель, на соответствующем радиусе развертки под действием импульса цели возникает яркая точка. Кроме того, возникает серия ярких эквидистантных точек под действием масштабных импульсов. Вращение антенны по часовой стрелке равносильно перемещению цели в обратном направлении. После полного оборота антенны на экране образуются масштабные кольца (электронная шкала дальности), а цель будет иметь вид небольшой дуги, угловые размеры которой приблизительно равны угловой ширине луча антенны.
Дальность цели отсчитывается с помощью масштабных колец. Азимут же цели βb отсчитывается по положению середины ее отметки относительно какого либо начального направления, например северного направления меридиана.
5. Структурная схема метеонавигационных радиолокаторов типа ВлГрозаВ».
Бортовые радиолокаторы, созданные на элементной базе первого поколения (электронные лампы, объемный монтаж), отличаВнлись большими габаритами и массой, имели малую надежность и состояли из большого количества блоков. Переход к элементной базе второго поколения (полупроводниковые приборы и модули) позволил значительно улучшить характеристики ряда узлов и блоков.
Эволюция РЛС шла, в основном, по пути уменьшения массы, габаритов, количества блоков и повышения надежности, а не увеличения мощности или раскрыва антенны. Ко второму поколению метеонавигационных РЛС относятся радиолокаторы ВлГрозаВ», получившие широкое распространение. При разработке модификаций РЛС ВлГрозаВ» учитывалось развитие элементной базы, поэтому современные модификации РЛС ВлГрозаВ» можно считать переходными к третьему поколению (интегральные микросхемы, микромодули). В настоящее время осуществляется переход к твердотельному исполнению бортовых РЛС и к цифровым методам обработки данных.
Наш метеонавигационная РЛС будет построен на основе локаторов второго поколения типа ВлГрозаВ».
Рассмотрим общую компоновку метеонавигационной РЛС семейства радиолокаторов ВлГрозаВ». С целью обеспечения оптимальных комплектаций радиолокатора для создаваемых и переоборудуемых самолетов основные его блоки выпускаются в различных вариантах. Все варианты и модификации максимально унифицированы, что позволяет удешевить их серийное производство и эксплуатацию, а также обеспечивает возможность использования в других комплектациях.
В любую комплектацию радиолокатора как минимум должны входить четыре блока: антенный (блок 1), основной приемо-передающий (блок 2), стабилизации и управления (блок 7), основной индикаторный (блок 4). Каждый из этих блоков может быть любой модификации.
При комплектации радиолокатора одним индикаторным блоком в состав комплекта обязательно должен быть включен эквивалент дополнительного индикатора (блок 35). При оснащении самолета двумя индикаторами дополнительный индикатор включается вместо указанного эквивалента.
Для повышения надежности РЛС в комплект вводят резервный приемопередатчик (блок 2) любой модификации. В этом случае необходима также коммутационная коробка (блок 17) и волноводный коммутатор (блок 47).
Радиолокатор сопрягается с самолетными гировертикалями, имеющими выходы сигналов крена и тангажа. Для коррекции текущих координат в комплект включают блок коррекции (блок 28), взаимодействующий с навигационным вычислителем.
При невозможности размещения на самолете основного индикатора (блока 4) вместо него может быть установлен дополнительный индикатор (блок 4-Д), имеющий меньшие размеры. В этом случае в комплектацию станции обязательно выводится отдельный пульт управления (блок 10).
Комплектация радиолокатора для данного типа самолета выбирается самолетостроительным предприятием и согласовывается с главным конструктором радиолокатора.
Разработка конструкции волноводного тракта для выбранной комплектации осуществляется разработчиком РЛС. Номинальные дальности действия РЛС обеспечиваются, если длина волноводного тракта не превышает 7 м. При большей длине тракта дальность сокращается примерно на 1,5% на каждый последующий метр длины. Для компенсации этих потерь можно использовать второй приемопередатчик блок 2-У (с предварительным усилителем на туннельном диоде).
После согласования с главным конструктором радиолокатора комплектации РЛС, схемы её сопряжения радиолокатору присваивается условное обозначение, например, ВлГроза 40В» тАФ для самолета Як-40, ВлГроза 154В» тАФ для самолета Ту-154.
Функциональная схема радиолокатора при работе в режимах ВлЗемляВ», ВлМетеоВ», ВлКонтурВ», ВлСносВ» показана на рис. 5 РЛС представляет собой импульсный некогерентный радиолокатор со сканирующей в азимутальной плоскости антенной и индикатором ВлазимуттАФдальностьВ». Схема (рис. 5) содержит все элементы типовой структурной схемы импульсной РЛС, однако они скомпонованы в четырех основных блоках, выделенных пунктиром.
Синхронизация работы передающего канала РЛС осуществляется частотой 400 Гц питающей сети. Модулятор приемопередатчика формирует высоковольтные импульсы, поступающие на магнетрон, который генерирует СВЧ импульсы. Для обеспеченияпрогрева катода магнетрона в модуляторе приемопередатчика осуществляется задержка на 3тАФ5 мин формирования модулирующего импульса по отношению к моменту включения напряжения питания 115В 400Гц. СВЧ импульсы через циркулятор и ферритовый вращатель плоскости поляризации по волноводному тракту передаются на облучатель антенного блока. Циркулятор служит для переключения антенны с приемного на передающий канал, т. е. выполняет функцию антенного переключателя.
Рис. 5. Функциональная схема РЛС семейства ВлГрозаВ»
Ферритовый вращатель плоскости поляризации служит для изменения поляризации СВЧ колебаний. В зависимости от поляризации СВЧ колебаний отражателем антенного блока формируется либо веерная косеканс-квадратная диаграмма направленности (для обзора земли), либо узкий симметричный луч. Отражатель антенного блока сдвоенный и состоит из параболического отражателя и отражателя специальной формы. Параболический отражатель представляет собой симметричный параболоид вращения, изготовленный из полностью металлизированной стеклоткани. При облучении параболического отражателя электромагнитной энергией он формирует диаграмму в виде узкого луча. Профиль отражателя специальной формы в вертикальных сечениях рассчитан для получения веерной диаграммы направленности типа косеканс-квадрат. Этот отражатель изготовлен из стеклоткани, металлизированные нити в которой расположены строго горизонтально с шагом 3 мм. При вертикальной поляризации электромагнитная энергия беспрепятственно проходит сквозь отражатель специальной формы и, отражаясь от параболоида, формирует узкий симметричный луч.
При изменении поляризации облучающих колебаний с вертикальной на горизонтальную (при подаче 27В на ферритовый вращатель плоскости поляризации) отражатель специальной формы, непрозрачный для волн этой поляризации, совместно с параболоидом вращения образует профиль, формирующий веерную диаграмму направленности в вертикальной плоскости.
Отраженные от целей сигналы (СВЧ импульсы), принятые антенным блоком радиолокатора, по волноводному тракту через циркулятор и разрядник защиты приемника поступают на смеситель канала сигнала, куда подается также СВЧ сигнал от гетеродина. После преобразования частоты с выхода смесителя импульсы промежуточной частоты поступают в предварительный усилитель промежуточной частоты (ПУПЧ) и затем в основной усилитель промежуточной частоты (УПЧ).
В ПУПЧ и УПЧ сигналы усиливаются и детектируются. Регулировка усиления приемного канала по выбранному закону осуществляется узлом ВАРУтАУРРУ, который запускается одновременно с излучением СВЧ импульса. Кроме того, узел ВАРУтАФРРУ обеспечивает запирание приемника на время действия мощного импульса магнетрона.
Схема АПЧ служит для поддержания постоянной разности частот магнетрона и гетеродина (промежуточной частоты). На смеситель АПЧ через предельный аттенюатор поступает часть СВЧ энергии магнетронного генератора. После преобразования на выходе смесителя образуются импульсы промежуточной частоты, которые поступают на вход узла АПЧ. Узел АПЧ вырабатывает сигнал, пропорциональный отклонению промежуточной частоты от ее номинального значения. Этот сигнал воздействует на управляющий электрод гетеродина.
С выхода УПЧ видеосигнал подается на вход видеоусилителя. Видеоусилитель при работе РЛС в режиме ВлЗемляВ» имеет ступенчатую, в режиме ВлМетеоВ» тАФ линейную, а в режиме ВлКонтурВ» тАФ линейно-падающую амплитудные характеристики. В видеоусилителе происходит усиление видеосигнала и смешивание его с калибрационными метками дальности, вырабатываемыми синхронизатором. Кроме того, в видеоусилитель из синхронизатора поступает импульс подсвета, обеспечивающий наблюдение сигналов на экране ЭЛТ только во время прямого хода развертки.
В режиме ВлКонтурВ» видеоусилитель преобразует сигналы к виду, удобному для индикации опасных для полетов зон, т. е. осуществляет выделение метеорологической информации.
Усиленный видеосигнал, смешанный с метками, поступает на ЭЛТ.
С помощью ключевой мостовой схемы развертки на экране ЭЛТ создается радиально-секторная развертка в координатах азимуттАФдальность. Модуляция по амплитуде линейно-нарастающих импульсов тока схемы развертки происходит с частотой азимутального сканирования антенны с помощью вращающегося трансформатора (ВТ) развертки канала азимутального привода антенны.
Стабилизированный высоковольтный источник питания обеспечивает питание второго анода ЭЛТ. Питание на остальные электроды ЭЛТ подается из узла питания трубки.
Модулятор приемопередатчика генерирует импульсы бланкирования и старт-импульс, синхронизирующие работу индикаторного и приемного каналов РЛС. Старт-импульс формируется в момент излучения СВЧ импульса в модуляторе и поступает на вход синхронизатора индикаторного блока. Синхронизатор вырабатывает ключевой импульс управления разверткой и импульс подсвета, начало которых совпадает с моментом прихода старт-импульса. Кроме того, синхронизатор формирует калибрационные метки дальности, первая из которых совпадает с моментом излучения, т. е. соответствует нулю дальности. Старт-импульс запускает также узел ВАРУтАФРРУ приемного устройства.
Схема электромеханического управления антенной обеспечивает сканирование антенны по азимуту и совмещение оси диаграммы направленности с плоскостью горизонта (или заданной плоскостью) при крене и тангаже самолета по каналу наклона.
Азимутальное сканирование осуществляется с помощью двигателя азимута и редуктора.
Решающий ВТ служит для получения напряжения, амплитуда которого пропорциональна мгновенному значению требуемого угла наклона луча. Это достигается запиткой обмоток ВТ напряжениями крена и тангажа с самолетной гировертикали через преобразующе-выравнивающие цепи блока стабилизации и управления. Снимаемое с роторной обмотки решающего ВТ напряжение поступает на входные цепи блока стабилизации и управления, где оно сравнивается с напряжением, пропорциональным углу наклона отражателя в данный момент, полученному с ВТ наклона. Суммарное переменное напряжение поступает на вход магнитно-тиристорного усилителя УР-20, откуда подается на обмотку управления двигателя наклона, перемещающего отражатель в плоскости наклона.
ВТ наклона является не только датчиком истинного текущего угла наклона отражателя, но и служит приемником и системе дистанционной передачи ручного наклона, плоскости стабилизации. Сигнал ручного наклона поступает с ВТ механизма ручного наклона ин
дикаторного блока.
6. Заключение
В данной курсовой работе были отработаны навыки самостоятельного решения инженерных задач, производился выбор и расчет тактико-технических характеристик (ТТХ) радиолокационной станции (РЛС), закреплялись вопросы соотношения параметров и принципы построения РЛС, используемых в гражданской авиации (ГА). Также рассматривалось влияние отдельных параметров и мешающих факторов (помех, условий распространения радиоволн) на показатели качества функционирования РЛС.
Сектор обзора в горизонтальной плоскости
|
ΔD
αaобз
|
В±100 0
|
Сектор обзора в вертикальной плоскости
|
ΔDβb обз
|
35 0
|
Диаметр пятна ЭЛТ
|
dn
|
0,5мм
|
Максимальная дальность действия РЛС
|
Rmax
|
450В·103м
|
Длительность импульса
|
τtu
|
1,5⋅Ч10-6c
|
Ширина ДНА в горизонтальной плоскости
|
θq0,5
|
2,74 0
|
Вероятность правильного обнаружения
|
D
|
0,5
|
Вероятность ложной тревоги
|
F
|
10-9
|
Коэффициент шума
|
N
|
10dB
|
| Диаметр экрана ЭЛТ
|
Dэ
|
0,25м
|
Минимальная дальность действия РЛС
|
Rmin
|
306м
|
Разрешающая способность РЛС по дальности
|
ΔDRр
|
1,755км
|
Разрешающая способность РЛС по азимуту на ср. дал.
|
ΔDαaр
|
3,380
|
Частота повторения зондирующих импульсов
|
Fn
|
277.778
|
Периодом обзора РЛС
|
Тобз
|
5 c
|
Потенциальная точность измерения дальности РЛС
|
Grn
|
24.805м
|
Потенциальная ошибка измерения азимута
|
Gαan
|
0.285
|
Скорость вращения антенны
|
Ойa
|
40 град⋅c-1
|
Количество импульсов в пакете
|
Nu
|
20
|
Коэффициент различимости
|
mp
|
1,297
|
Чувствительность приемника равна
|
Pnmin
|
113,6 dB/мВт
|
Импульсная мощность излучения
|
Pu
|
480 ⋅kВт
|
Средняя мощность излучения
|
Рср
|
226Вт
|
Полоса пропускания приемника
|
ΔDf
|
8.059⋅105 Гц
|
Рабочая длинна волны
|
О»
|
3см
|
Коэффициент направленного действия антенны
|
DA
|
5490
|
Коэффициент усиления антенны
|
GA
|
5215
|
| Эффективная площадь антенны
|
SA
|
0.448м2
|
7. Список использованной литературы:
- Финкельштейн М. Н. Основы радиолокации. тАУ М.: Радио и связь, 1973, - 496 с.
- Современная радиолокация (Анализ, расчет и проектирование систем) / Под ред. Ю.ВаБ.ВаКобзарева. тАУ М.: Сов. радио, 1969, - 704 с.
- Соколов П. М. Теоретические основы радиолокации (Методические указания по курсовой работе для студентов тАж).
- Яновский Ф. Й. Бортовые метеонавигационные радиолокаторы. Структура системы и особенности построения передающих устройств. тАУ Киев. 1987, -.78с.
Вместе с этим смотрят:
Терморезисторный эффект. ТерморезисторыТермосорбционный масс-спектрометрТермоэмиссионные преобразователи энергииТехнологические измерения и приборы