Анализ задачи общего воздействия динамическим магнитным полем на человека и формирование требований на технические средства комплексной магнитотерапии
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ
На тему:
"Анализ задачи общего воздействия динамическим магнитным полем на человека и формирование требований на технические средства комплексной магнитотерапии"
МИНСК, 2008
Воздействию магнитных полей на организм человека посвящено большое число работ и, хотя физика воздействия до сих пор проявлена слабо, имеется значительный ряд исследований по установлению функциональных связей состояния организма человека с параметрами магнитных полей. На повестке дня стоит вопрос формирования динамических магнитных полей, имеющих определенную функциональную направленность, прежде всего для лечения различных заболеваний. Причем формирование магнитных полей в локальной области уже не отвечает многим требованиям медицины. Требуется формирование динамических магнитных полей вокруг всего организма человека вначале как физиотерапевтической процедуры, а в дальнейшем и как фактора среды обитания.
Методологическое, математическое, физиологическое и, наконец, техническое решение этой задачи для формирования магнитных полей явилось бы прецедентом решения аналогичных задач для других видов полей и, в конечном итоге, привело бы к решению глобальной задачи формирования нужной структуры физических полей вокруг человека, наличие которых помогло бы ему справиться с болезнями. Для развития рассматриваемого направления с целью повышения эффективности лечения, расширения класса заболеваний, охватываемых системами магнитотерапии, требуется решение следующих вопросов:
В· разработка единичного универсального излучателя магнитного поля, методики его расчета и оптимизации параметров в соответствии с заданными критериями;
В· разработка способов формирования оптимальной конфигурации поля в целом, соответствующей заданной методике лечения;
В· конструирование эффективных технических средств для создания заданных полей вокруг человека;
В· исследование механизмов воздействия динамических магнитных полей (ДМП) на организм человека и его важнейшие функции;
В· разработка эффективных каналов обратной связи и отыскание их параметров с целью автоматизированного управления характеристиками ДМП в ходе воздействия на основе измерения реакцией пациента.
В настоящем разделе сконцентрировано внимание на формировании динамических магнитных полей вокруг всего человека. Под динамическим магнитным полем будем понимать поле, изменяющееся во времени и в пространстве заданного объема (в данном случае внутри и вокруг человека) и имеющее ячеистую структуру, дискретность которой определяется элементами объекта восприятия (например, органы, сосуды, ткани и т.п.), что позволяет обеспечить достаточную независимость управления векторами магнитного поля в соседних ячейках структуры.
Реализация этой идеи распадается на две задачи. Первая из них связана с техническим решением формирования в заданной локальной области пространства ничтожно малого объема (физическая точка, далее - просто точка) вектора магнитной индукции, локализацией выделенных точек, формированием объемных матриц векторов магнитного поля, локализацией точек с учетом формы тела человека и его органов, обеспечивающей необходимое распределение магнитного поля как внутри тела человека, так и на поверхности. Эта задача обусловливает разработку и создание источников магнитного поля, определение их числа, размеров, пространственного расположения, взаимодействия и конфигурации. Внешним проявлением решения данной задачи является вид объема, в котором размешается человек. Это может быть магнитная комната, магнитный бокс, магнитная камера, магнитная кушетка, магнитный ложемент, магнитный скафандр и др. При этом конструкция объема размещения источников излучения играет не последнюю роль в эффективности воздействия, а тем более в системах, обеспечивающих формирование заданной конфигурации динамического магнитного поля в заданной области пространства.
Вторая задача связана с системой электронного формирования и управления электрическими токами и напряжениями с целью получения заданной динамики (перемещения во времени и пространстве) векторов магнитной индукции в каждой ячейке заданного объема. Рассмотрим эти задачи раздельно.
Формирование метрики векторов магнитного поля
Многомерный вектор динамического магнитного поля D - {Иm, Im} составлен из многомерного вектора пространственного расположения индукторов Иm = {И1, И2,.. Иs} и многомерного вектора токов, протекающих через индукторы, Iт = {I1, I2,.. Iп}, где s - число индукторов, n - число каналов аппарата. В свою очередь последний составлен из векторов канальных токов Ii = {I,Р, Т,t}, где I - интенсивность, Р - полярность, Т - время подключения, t - текущее время.
Таким образом поставленная задача может быть формализована в следующих этапах:
В· синтез пространственного расположения излучателей магнитного поля и формирование параметров одиночного базового излучателя;
В· синтез канала формирования тока, изменяющегося во времени по заданному закону в определенном диапазоне интенсивностей и спектра, отражающему закон изменения магнитного поля во времени;
В· синтез многомерности каналов, имеющей заданную корреляционную зависимость, отражающей заданную функциональную связь между локалиями и формирующей закон изменения поля в пространстве.
Наложим некоторые ограничения на решаемую задачу синтеза с учетом биологических свойств объекта восприятия и технической реализуемости системы.
Изменения магнитного поля во времени и в пространстве должны иметь периодический или квазипериодический характер, хотя и со сложным периодом формирования. Это связано с периодичностью основных биоритмов объекта (пульс, a-ритм, B-ритм) и периодичностью основной среды обитания (день, ночь и т.п.).
Изменения во времени и в пространстве должны учитывать периодичность биоритмов объекта либо с целью синхронизации с ними, либо наоборот, с целью десинхронизации.
Скорость изменения магнитного поля во времени и в пространстве должна быть одного порядка с основными скоростями функционирования организма объекта на макро-уровне (скорость кровотока, распространение ощущений, сокращение мышц и т.п.) и перекрывать их на достаточные значения в обе стороны.
Дискретность структуры динамического поля во времени, в пространстве и по уровню должны быть одного порядка и функционально связаны с обобщенной дискретностью макроэлементов объекта воздействия (органов человека).
Метрика динамического поля в пространстве должна быть согласована с метрикой макроэлементов и процессов в человеке. Рассмотрим задачу формирования динамического процесса во времени в одной точке пространства. Процесс квантования по уровню и дискретизации по времени.
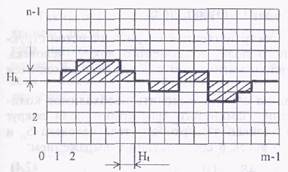
Рисунок 1 тАУ Диаграмма формирования полей, дисентируясь на следующие кратных по уровню и во времени рассуждения.
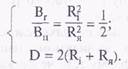
Формирование ячеистой структуры магнитного поля на одной конечности человека длиной L ограничено, кроме всего прочего, способностью в концентрации поля. Так как значение индукции магнитного поля в однородной среде убывает пропорционально квадрату расстояния, то по длине конечности в качестве размера локальной ячейки примем область, на границах которой поле убывает в два раза. Если принять, что магнитная индукция в центре ячейки Вц = Bi, а на границе Вг - Вi/2, можно определить ее размер D, исходя из размера ячейки Rя и размера Ri области формирования однородного поля:
 (1)
(1)
Из последнего соотношения определим размер эффективного действия ячейки:
 (2)
(2)
Тогда размер ячейки составит Техническая реализуемость диктует размеры источника излучения в пределах Dя = 3..5 см. Тогда размер одной элементарной ячейки магнитного поля D = 2,41-Dя, = 2,41(3..5) может быть определен в пределах D = 7..12 см.
Техническая реализуемость диктует размеры источника излучения в пределах Dя = 3..5 см. Тогда размер одной элементарной ячейки магнитного поля D = 2,41-Dя, = 2,41(3..5) может быть определен в пределах D = 7..12 см.
Следовательно, на длине конечности L-1 м должно быть сформировано от 8 до 14 ячеек, а по длине всего тела человека 16..30 ячеек. Таким образом, порядок размерностей ячеек и процессов определился в пределах 8..30, т.е. значения m и n (рис.1) также должны находиться в пределах 8..30. При этом необходимо учесть, что определяющим фактором в расчете размеров явилась физическая реализуемость источников магнитного поля на современном уровне развития техники.
Анализ метрики поля
Выше проанализирована пространственная метрика ячеистой структуры динамического магнитного поля, создаваемого вокруг человека. Причем диаметр Dя одной ячейки магнитного поля должен находиться в пределах 7..12 см.
На следующем этапе анализа следует выяснить необходимое количество ячеек для формирования замкнутого магнитного поля вокруг человека. Обозначим общую площадь поверхности тела человека Sn и рассчитаем необходимое число ячеек в соответствии с выражением:
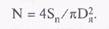 (3)
(3)
Если принять общую площадь поверхности тела человека в среднем равную Sn = 40000 см2 (с запасом на комфортное расположение пациента), то общее число ячеек определится в пределах N = 400..1000.
Обратимся теперь к вопросу формирования конфигурации объема магнитного поля вокруг человека. Очевидно, что пространственная структура макрополя, окружающая все тело пациента в целом, имеет немаловажное значение для достижения высокоэффективного лечения. Можно предложить множество моделей конфигурации ячеистой структуры излучателей:
В· в форме плоскости, на которой располагается человек;
В· в форме двух плоскостей, между которыми располагается человек;
В· в форме цилиндра, внутри которого располагается человек;
В· по форме тела человека и др.
Конфигурации перечислены в порядке усложнения конструкции. Здравый смысл подсказывает, что, по-видимому, наиболее эффективной будет конструкция, учитывающая форму тела человека. Однако реализация ее в виде гибкого эластичного костюма (напоминающего гидрокостюм) вряд ли окажется целесообразной, прежде всего из-за массы конструкции (порядка 100 кг). Поэтому безусловно требуется некоторый жесткий каркас, воспринимающий всю нагрузку. В этом плане сформировались следующие направления конструирования МТА общего воздействия.
В первом из них для всех конечностей, головы и туловища человека формируются цилиндры жесткой конструкции, в которые необходимо поместить пациента для проведения сеанса магнитотерапии, что не так просто для больного человека.
Во втором для каждой конечности, головы и туловища создается некая упруго сгибающаяся в цилиндр плоскость, которая держит свою форму за счет упругих сил. Исходно на эти плоскости ложится пациент, а затем уже на частях его тела формируются цилиндры.
В третьем изготавливаются две жесткие полусферы по форме тела человека (скорлупы), в которых размещены индукторы. В нижнюю укладывается пациент и закрывается верхней.
Второй и третий подходы являются наиболее приемлемыми для конструирования средства, обеспечивающего целесообразную модель конфигурации магнитного поля, учитывающую форму тела человека.
Таким образом, задача, связанная с техническим решением направленного формирования в заданной физической точке пространства вектора магнитной индукции, в конечном итоге наиболее целесообразно решается путем генерации магнитного поля в конфигурации тела человека с помощью конструкции, собираемой из излучающих плоскостей ячеистой структуры с числом ячеек в пределах 400..1000.
Анализ метрики управления
Перейдем к решению второй задачи, связанной с системой электронного формирования и управления электрическими токами и напряжениями с целью получения заданной динамики (перемещения во времени и пространстве) векторов магнитной индукции в каждой ячейке заданного объема.
Прежде всего обратим внимание на то, что излучатели магнитного поля исходно имеют вид плоскостей, из которых формируется затем объем по форме тела человека. Следовательно, управление ячеистой структурой на плоскости в общем виде наиболее целесообразно представить матричной организацией NxM (рис.2). Так как по нашим расчетам число ячеек находится в пределах 400..1000, то в случае использования квадратной матрицы ее размерность в среднем равна 2020. Данная размерность достаточно велика для реализации, хотя и выполнима. Проанализируем возможности ее уменьшения. Прежде всего обратимся к определенной симметричности тела человека и достаточному единообразию функционирования его частей. При этом выделим 6 макрочастей тела человека: 2 ноги, 2 руки, голова и туловище.

Рисунок 2 тАУ Ячеистая структура плоскости, создающее магнитное поле.
Четыре из выделенных частей (ноги и руки действительно обладают единообразием функционирования, чего однако никак нельзя сказать относительно остальных частей. Тогда, принимая во внимание, что суммарная площадь поверхности ног и рук составляет около 2/3 общей площади поверхности тела человека, то независимой становится площадь, равная
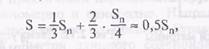 (4)
(4)
или, в нашем случае, независимое управление достаточно организовать в числе ячеек в пределах 200..500, при этом размерность квадратной матрицы снижается в среднем до 16x16. Однако и эта размерность достаточна велика, поэтому для дальнейшего упрощения можно всю площадь разбить на шесть единообразных матриц, работающих параллельно. Тогда независимое управление достаточно организовать в числе ячеек 60..160 и свести к размерности матрицы управления 8x8, что особенно удобно при использовании микропроцессорных средств управления.
Важной подзадачей электронного управления является формирование заданной величины и направления тока в одной ячейке матрицы излучения независимо от других ячеек. Выделим ячейку и управляющие элементы, представленные на рис.3. Вектор индукции магнитного поля В(Т) - {Y,X,Uy) Ux} представляет собой функцию векторов управления ключами Ку (строка матрицы), Кx (столбец матрицы) и векторов напряжений Uy и Ux, Выделим множество, при котором В(I) отлично от нуля. Это множество соответствует следующим условиям: Yi&Xj- - I, Uy ф Ux. При этом вектор индукции магнитного поля пропорционален В(I) = (Uy - Ux) /Qя, где Qя - общее сопротивление индуктора, расположенного в ячейке. Упростим вектор управления с четырех - до трехмерного. Это оказывается возможным, если, например, сделать управляющее напряжение Ux = 0. Но тогда становится необходимой двухполярная реализация вектора Uy. Необходимо отметить, что если векторы управления Y,X задать в булевском представлении, то вектор Uy оказывается в представлениях бесконечнозначной логики. Сведем управление ячейкой исключительно к булевым представлениям. Это оказывается возможным, если применить широтно-импульсную модуляцию (ШИМ) или цифро-аналоговое преобразование (ЦАП) при управлении вектором индукции. Тогда структуру управления ячейкой можно представить в виде, показанном на рис.4, где Z - код управления ЦАП или ШИМ. При этом вектор магнитного поля оказывается пропорционален В(I) - Z(Y&X), что реализовать достаточно просто в цифровой форме, причем наиболее просто реализуется ШИМ. Таким образом, управление ячейками матрицы удалось свести к трехмерному управлению булевыми переменными.
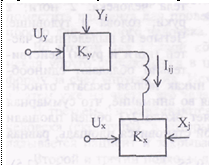
Рисунок 3 тАУ Схема ячейки матрицы излучения.

Рисунок 4 тАУ Схема управления матрицы излучения.
ЛИТЕРАТУРА
1. Системы комплексной электромагнитотерапии: Учебное пособие для вузов/ Под ред А.М. Беркутова, В.И. Жулева, Г.А. Кураева, Е.М. Прошина. тАУ М.: Лаборатория Базовых знаний, 2000г. тАУ 376с.
2. Электронная аппаратура для стимуляции органов и тканей /Под ред Р.И. Утямышева и М. Враны - М.: Энергоатомиздат, 2003.384с.
3. Ливенсон А.Р. Электромедицинская аппаратура.: [Учебн. пособие] - Мн.: Медицина, 2001. - 344с.
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы