Аналiз функцiональних схем, основнi елементи систем автоматичного регулювання пiдсилення
АНАЛРЖЗ ФУНКЦРЖОНАЛЬНИХ СХЕМ, ОСНОВНРЖ ЕЛЕМЕНТИ СИСТЕМ АРП
1. Загальна характеристика та аналiз функцiональних схем системрегулювання пiдсилення
Рiзновиди систем АРП
Автоматичне регулювання пiдсилення призначене для пiдтримки рiвня вихiдного сигналу прийомного пристрою або пiдсилювача поблизу деякого номiнального значення при змiнi рiвня вхiдного сигналу. Автоматичне виконання цiii функцii необхiдно тому, що змiни рiвня вхiдного сигналу можуть вiдбуватися хаотично i досить швидко. Ручне регулювання пiдсилення використовуiться лише для установки рiвня вихiдного сигналу, що повинний пiдтримуватися системою АРП.
РД багато причин, через якi рiвень вхiдного сигналу безупинно змiнюiться [8]:
- змiна вiдстанi мiж джерелом випромiнювання i приймальним пристроiм;
- змiна умов поширення радiохвиль;
- iнтерференцiя радiохвиль, що прийшли в мiсце прийому по рiзних
шляхах;
- перебудова приймача з однiii станцii на iншу;
- змiна взаiмоспрямованостi приймальних i передавальних антен i т.д.
У радiозв'язку напруга сигналу на входi приймача може змiняться в 106 раз i бiльше. Вихiдна напруга приймача при цьому не повинна змiнюватися бiльш нiж у 1,2 ÷ 3 рази. Ця вимога диктуiться як припустимими перекручуваннями iнформацiйноi складовоi сигналу в трактi прийомного пристрою, так i вiдсутнiстю перевантажень його каскадiв, що можуть привести до тривалих утрат чутливостi. При цьому сама система АРП не повинна викликати надмiрних перекручувань огинаючоi сигналу або призводити до появи паразитноi амплiтудноi модуляцii сигналу, тобто система АРП повинна бути стiйкою.
В iдеальному випадку вихiдна напруга приймача (пiдсилювача) повинна залишатися незмiнною пiсля досягнення деякого значення Uвих min, що забезпечуi нормальну роботу кiнцевоi апаратури. Це значить, що коефiцiiнт пiдсилення повинний змiнюватися за законом [9]
![]()
Реальнi системи АРП вiдповiдають цьому спiввiдношенню з великим або меншим наближенням.
Системи АРП можуть бути зворотнiмиi прямими. Зворотнi системи АРП i системами зi зворотним зв'язком тАФ у них точка знiмання напруги для формування регулюючого впливу розташована далi вiд входу приймача, чим точка прикладення регулюючого впливу. РЖнакше кажучи, це системи з регулюванням ВлназадВ». У прямих системах АРП точка знiмання напруги для запуску схеми АРП розташована ближче до входу приймача, чим точка прикладення регулюючого впливу. Цi системи не утворюють кола зворотнього зв'язку i i системами з регулюванням ВлупередВ». Кожна з цих систем маi переваги i недолiки.
Зворотнi системи АРП не можуть дати повноi сталостi вихiдноi напруги, тому що воно i вхiдним для системи АРП i повинне мiстити iнформацiю для вiдповiдноi змiни регулюючого впливу. Крiм того, вони не можуть забезпечити одночасно велику глибину регулювання (Uвих ≈ const) i високу швидкодiю з мiркувань стiйкостi. Однак цi системи захищають вiд перевантажень усi каскади приймача, розташованi далi вiд входу, чим точка прикладення регулюючого впливу, а самi ланцюги АРП i пiд впливом сигналу зi стиснутим динамiчним дiапазоном i також не пiдданi перевантаженням.
Прямi системи АРП принципово можуть забезпечити iдеальне регулювання, тобто Uвих ≈constпри Uвих ≥ Uвих min i як завгодно високу швидкодiю. Однак практично це не досягаiться, тому що ступiнь сталостi вихiдноi напруги обумовлений конкретними даними елементiв ланцюга АРП i ланцюгiв прийомного пристрою, пiдданих технологiчним розкидам, тимчасовим i режимним змiнам. Ланцюг АРП захищаi вiд перевантажень тiльки тi каскади, що розташованi далi точки прикладення регулюючого впливу, i сам i пiд впливом сигналу iз широким динамiчним дiапазоном, тобто пiдданий перевантаженням i повинен мiстити внутрiшнi зворотнi системи АРП. У цьому випадку система АРП практично перетворюiться в окремий канал прийомного пристрою, не менш складний, чим його основний канал.
Усi цi причини призводять до того, що в даний час бiльше поширення одержали зворотнi системи АРП. Очевидно, кращi результати може дати застосування комбiнованоi системи АРП, що включаi в себе ланцюги зворотньоi i прямоi АРП з переважаючим впливом зворотнього ланцюга АРП. Функцiональна схема такоi комбiнованоi системи АРП приведена на рис. 1.
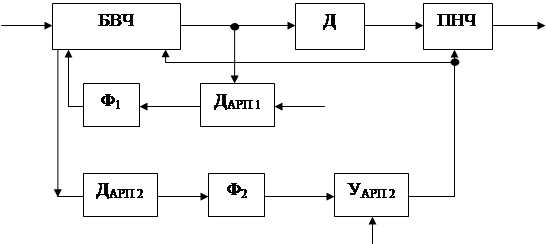
Рис 1. Функцiональна схема комбiнованоi системи АРП
Зворотня система АРП утворюiться детектором АРП ДАРП 1 , фiльтром Ф1 i всiма каскадами основного тракту, розташованими мiж точкою прикладення регулюючоi напруги Uр1 i виходом блоку високоi частоти (БВЧ).
В пряму систему АРП входять детектор Д АРП 2 , фiльтр Ф2 i пiдсилювач постiйноi напруги У АРП 2 . Регулююча напруга Uр2 вводиться в БВЧ i в пiдсилювач низькоi частоти - ПНЧ (останнi не обов'язково i використовуiться рiдко). Фiльтри Ф1, Ф2 додають ланцюгам АРП необхiдну iнерцiйнiсть, обумовлену як розумiннями стiйкостi (АРП1), так i вiдсутностi демодуляцii АМ-сигнала (АРП1, АРП2). Роль фiльтрiв Ф1 i Ф2 можуть грати навантажувальнi ланцюги вiдповiдних детекторiв. Регулюючi напруги Uр1 i Uр2 мiстять складовi, що змiнюються з частотами паразитноi амплiтудноi модуляцii вхiдного сигналу, обумовленоi перерахованими ранiше причинами, але не мiстять складових, що змiнюються з частотою корисноi модуляцii. Цi складовi безперешкодно проходять через основний тракт радiоприймального пристрою, видiляються детектором Д и пiдсилюються пiдсилювачем низькоi частоти, утворюючи вихiдну напругу приймача U вих. НЧ. Звичайно немаi необхiдностi знижувати посилення слабких сигналiвU вх > U вх min, що не створюють перевантажень приймача i не забезпечують номiнальноi вихiдноi напруги навiть при максимальному посиленнi БВЧ i ПНЧ. Для додання ланцюгам АРП граничних властивостей, тобто включення iх тiльки при визначенiй амплiтудi сигналу, ланцюг АРП замикають примусовим зсувом i вiдмикають тiльки пiсля того, як напруга сигналу перевищить напругу запирання. Звичайна напруга запирання (ВлзатримкиВ») подаiться на детектори або пiдсилювачi АРП. На рис. 3.1 це напруги Ез1i Е зПодiбнi системи АРП називаються затриманими. Затримка може бути введена по середньому значенню сигналу або по максимуму. Якщо постiйна часу навантажувального ланцюга, ДАРП1, менше перiоду повторення iмпульсiв (при iмпульсному сигналi) i дiод Д АРП 1 , замкнений напругою затримки Е31, то при Uвих < Е31 система АРП буде розiмкнута. При U вих >Е31 дiод ДАРП 1 вiдкриваiться кожним iмпульсом, що задовольняi цiй умовi, i пiсля фiльтрацii у фiльтрi Ф1 виробляiться регулююча напруга Uр1 , пропорцiйна амплiтудi максимального iмпульсу. Це система АРП по максимуму сигналу, що прагне пiдтримати постiйним максимальне значення вихiдноi напруги.
У системi АРП2 напругою затримки Ез2 закритий пiдсилювач постiйноi напруги У АРП Вiн вiдкриiться тiльки тодi, коли випрямлена i профiльтрована фiльтром Ф2 напруга перевищить Ез Ця напруга пропорцiйна середньому значенню вхiдного сигналу. У такий спосiб створюiться система АРП по середньому значенню, що прагне пiдтримати незмiнним середнi значення вихiдноi напруги. На рис. 3.1 у ланцюзi АРП 1 немаi спецiального пiдсилювача нi в ланцюгах високоi частоти, нi на постiйному струмi. Це не посиленасистема АРП. Система АРП 2 - посилена,тому що мiстить пiдсилювач У АРП 2 посилюючий сигнал у ланцюзi АРП 2 (регулююча напруга). Посиленi системи АРП мають бiльшу глибину регулювання i здатнi забезпечувати менший динамiчний дiапазон вихiдного сигналу.
З принципу дii системи АРП випливаi, що при слабкому сигналi коефiцiiнт пiдсилення приймача максимальний. При цьому на виходi прослуховуються шуми, створенi зовнiшнiми перешкодами i власними флуктуацiйними процесами в каскадах радiоприймального пристрою. У деяких випадках це небажано i тодi використовуiться безшумова система АРП (рис. 2). Автогенератор Г генеруi коливання досить високоi частоти, якi знаходяться поза межами смуги пропускання ПНЧ. Цi коливання детектуються детектором Дг i випрямлена напруга замикаi один з каскадiв ПНЧ. З появою сигналу за умови Uвих> Е3 замикаiться система АРП i починаi виробляти напругу UР, що прикладаiться до електродiв активного приладу генератора Г и зриваi його коливання. При цьому знiмаiться напруга, що замикаi ПНЧ, i сигнал починаi надходити на вихiд.
Вместе с этим смотрят:
IP-телефония. Особенности цифровой офисной связи