Ансамбли различаемых сигналов. Структура устройств распознавания портретов. Оптимальная обработка некоррелированных портретов
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
кафедра ЭТТ
РЕФЕРАТ на тему:
ВлАнсамбли различаемых сигналов. Структура устройств распознавания портретов. Оптимальная обработка некоррелированных портретовВ»
МИНСК, 2008
Ансамбли различаемых сигналов
Ансамбли различаемых сигналов, т.е. группы M однородных сигВнналов, должны отличаться по какому-то параметру или признаку - форме, времени, частоте, пространству, поляризации (рис. 1):
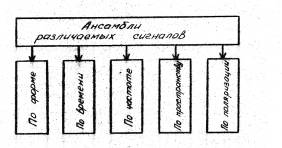
Рис. 1 Классификация различаемых сигналов

где

 - вектор напряженности электромагнитного поля К-го сигнала, характеризующий его поляризационную структуру;
- вектор напряженности электромагнитного поля К-го сигнала, характеризующий его поляризационную структуру;
 - амплитудно-фазовое распределение К-го сигнала на раскрыто антенны, характеризующее пространстВнвенную структуру сигнала;
- амплитудно-фазовое распределение К-го сигнала на раскрыто антенны, характеризующее пространстВнвенную структуру сигнала;
 - закон модуляции К-го сигнала, характеризующий форму сигнала;
- закон модуляции К-го сигнала, характеризующий форму сигнала;
 - время задержки К-го сигнала относительно некоторого опорВнного момента времени;
- время задержки К-го сигнала относительно некоторого опорВнного момента времени;
 - частотный сдвиг К-го сигнала относительно некоторой несуВнщей частоты
- частотный сдвиг К-го сигнала относительно некоторой несуВнщей частоты 
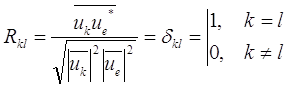
Условием различимости сигналов является их взаимная ортогональВнность
Различаться в этом смысле по поляризации могут только два сигнала (М=2), относящиеся к двум взаимно ортогональным по поляризации составляющим произвольного поляризационного базиса 
Различаться по времени могут M >> I сигналов, если на интерваВнле временного уплотнения Tупл умещается не менее М элементов временного разрешения сжатых по времени широкополосных сложных
сигналов  (рис. 2):
(рис. 2):
Различаться по частоте могут M В» I сигналов, если на интервале частотного уплотнения Fупл умещается не менее М элементов частотВнного разрешения сжатых по спектру длинноимпульсных сложных сигВнналов  (рис. 3):
(рис. 3):
 .
.
Различаться по пространству могут M>>I сигналов, если в диапазоне телесного углового уплотнения  умещается не менее М элеВнментов телесного углового разрешения
умещается не менее М элеВнментов телесного углового разрешения  (рис. 4):
(рис. 4):

Различаться по форме могут M>>I сигналов с разными законами внутриимпульсной модуляции (КФМ сигналы с различными кодами, ЧМ сигВнналы с различными законами частотной модуляции и т.п.).
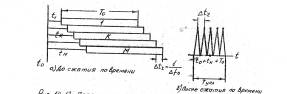
Рис.2 Пояснение различения сигналов по времени
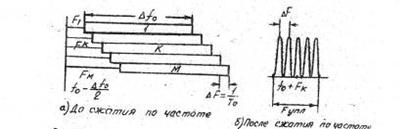
Рис 3 Пояснение различия сигналов по частоте
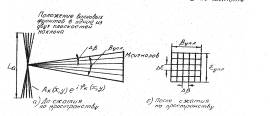
Рис.4. Пояснение различения сигналов по пространству
Решающее правило
Рассмотрим решающее правило задачи распознавания-различения по аналогии с задачей обнаружения. Задача обнаружения двухальтер-кативна, так как при обнаружении выносится одно из двух решений: "есть сигнал" или "нет сигнала". В отличие от нее задача распозВннавания многоальтернативна: выносится решение о принадлежности портрета или сигнала х одному из M классов.
Решение задачи обнаружения по критерию минимума среднего рисВнка приводит к необходимости сравнения так называемого отношения
правдоподобия

c порогом
который зависит от априорных вероятностей наличия  и отсутствия
и отсутствия  сигнала и стоимостей
сигнала и стоимостей  принятия К-го решения при
принятия К-го решения при  условии.
условии.
При этом правило решения выглядит следующим образом:
если  , то принимается решение
, то принимается решение  ,
,
если  , то принимается решение
, то принимается решение  ,
,
Аналогично при решении многоальтернативной задачи распознаВнвания-различения с позиций минимального среднего риска правило решения определяется следующим выражением:
если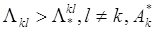 то
то
отношение правдоподобия зашумленного портрета (сигнала) К-го класса на фоне зашумленного портрета (сигнала)  -го класса,
-го класса,
 - порог сравнения отношения правдоподобия
- порог сравнения отношения правдоподобия  ,
,
 - многомерная плотность вероятности комплексных амплитуд принятого сигнала по элементам пространства распознавания (различения) при условии наличия портВнрета (сигнала) К-го класса
- многомерная плотность вероятности комплексных амплитуд принятого сигнала по элементам пространства распознавания (различения) при условии наличия портВнрета (сигнала) К-го класса
 - фоновая (помеховая) составляющая принятого сигнала по элементам пространства распознавания (различения),
- фоновая (помеховая) составляющая принятого сигнала по элементам пространства распознавания (различения),
 - априорные вероятности появления портретов (сигналов) К-го
- априорные вероятности появления портретов (сигналов) К-го  класса.
класса.
Полагая стоимости правильных решений равными нулю  , стоимости ошибочных решений одинаковыми
, стоимости ошибочных решений одинаковыми  , а появление портретов (сигналов) разных классов равновероятным
, а появление портретов (сигналов) разных классов равновероятным  , правило решения представляется в виде:
, правило решения представляется в виде:
если для всех
для всех  то
то
Процедура принятия решения согласно этому правилу состоит в следующем. Производится обработка комплексных амплитуд  , принятого сигнала по элементам пространства распознавания (различения) в соответствии с алгоритмом, рекомендуемым отношением правВндоподобия . Номер "К", при котором случайная величина - отВнношение правдоподобия окажется больше единицы для всех
, принятого сигнала по элементам пространства распознавания (различения) в соответствии с алгоритмом, рекомендуемым отношением правВндоподобия . Номер "К", при котором случайная величина - отВнношение правдоподобия окажется больше единицы для всех  и является номером гипотезы, которую можно принять с наименьшим средним риском. Таким образом, решение принимается на основе поВнследовательной проверки всех гипотез путем сравнения каждой из них со всеми остальными.
и является номером гипотезы, которую можно принять с наименьшим средним риском. Таким образом, решение принимается на основе поВнследовательной проверки всех гипотез путем сравнения каждой из них со всеми остальными.
Для того чтобы с наименьшим риском ответить на вопрос о наличии портрета (сигнала) 1-го класса, необходимо проверить отношения правдоподобия  для всех
для всех  (их число равно М-1). Если все окажутся больше единицы, то при наименьшем среднем риске следует принять гипотезу о наличии портрета (сигнаВнла) 1-го класса. Если неравенства не соблюдены, то проверяются аналогичным образом отношения правдоподобия
(их число равно М-1). Если все окажутся больше единицы, то при наименьшем среднем риске следует принять гипотезу о наличии портрета (сигнаВнла) 1-го класса. Если неравенства не соблюдены, то проверяются аналогичным образом отношения правдоподобия 
и т.д., вплоть до  . Максимально возможное число проверок равно таким образом M(M-1).
. Максимально возможное число проверок равно таким образом M(M-1).
Процедуру принятия решения можно существенно упростить. ДейВнствительно, представив правило решения в виде:
если >
>  ,
,  то,
то,
и, разделив левую и правую части неравенства на многомерную плотВнность вероятности комплексных амплитуд принятого сигнала по элеВнментам пространства распознавания (различения) при условии отсутВнствия всякого портрета (сигнала)  , когда
, когда  , находим правило решения в несколько иной форме:
, находим правило решения в несколько иной форме:
если то, где
то, где
 - отношение правдоподобия зашумленного портрета (сигнала) К-го класса. Это правило решения прежде всего убеждает в том, что число проверок сокращаетВнся до числа проверяемых гипотез М-1. Во-вторых, это правило решеВнния убеждает в преемственности задач обнаружения и распознавания. В самом деле, левая и правая части неравенства (правила решения) свидетельствуют о том, что вначале необходимо осуществить оптиВнмальную пространственно-временную и поляризационную обработку кажВндого элемента портрета (=1,тАжN)в соответствии с алгоритмом, рекомендуемый отношением правдоподобия
- отношение правдоподобия зашумленного портрета (сигнала) К-го класса. Это правило решения прежде всего убеждает в том, что число проверок сокращаетВнся до числа проверяемых гипотез М-1. Во-вторых, это правило решеВнния убеждает в преемственности задач обнаружения и распознавания. В самом деле, левая и правая части неравенства (правила решения) свидетельствуют о том, что вначале необходимо осуществить оптиВнмальную пространственно-временную и поляризационную обработку кажВндого элемента портрета (=1,тАжN)в соответствии с алгоритмом, рекомендуемый отношением правдоподобия
и, распределив комплексные амплитуда принятого сигнала по алименВнтам пространства распознавания (различения) осуществить совместВнную обработку элементов каждого К-го портрета (сигнала) (k=1,тАжM) в соответствии с алгоритмом, рекомендуемым отношением правдоподобия
 .
.
Структура устройств распознавания портретов. Оптимальная обработка некоррелированных портретов.
Согласно решающего правила устройство расВнпознавания М портретов должно состоять из устройства пространственВнно-временной и поляризационной обработки принятого сигнала по всем N элементам пространства распознавания, устройства распределеВнния комплексных амплитуд принятого сигнала по элементам пространВнства распознавания (устройства формирования портрета), М каналов устройств оптимальной обработки всех К -х портретов (К=1,2..М), устройства сравнения и принятия решения (рис. 5).
Рассмотрим два крайних случая: оптимальную обработку некорВнрелированных портретов (дальностный, картинный, доплеровский) и опВнтимальную обработку сильно коррелированных портретов (частотно-реВнзонансный, поляризационный).
В случае некоррелированных портретов многомерная плотность веВнроятности совокупности комплексных амплитуд  принятого сигнала, относящихся к N элементам пространства распознавания, в отсутстВнвие портрета
принятого сигнала, относящихся к N элементам пространства распознавания, в отсутстВнвие портрета  определяется выражением:
определяется выражением:
где  - дисперсия (мощность) помеховых составляющих принятого сигнала по элементам пространства распознавания
- дисперсия (мощность) помеховых составляющих принятого сигнала по элементам пространства распознавания  .
.
Та же многомерная плотность вероятности при наличии портрета К-го класса 

где  - дисперсия (мощность) составляющих К-го портреВнта по элементам пространства распознавания
- дисперсия (мощность) составляющих К-го портреВнта по элементам пространства распознавания 
Отношение правдоподобия, определяющее структуру оптимальной обработки портрета К-го класса

=
где  - относительная интенсивность тАУ й комплексной амплитуды К-го портрета, откуда монотонно связанная с отношением правдоподобия величина
- относительная интенсивность тАУ й комплексной амплитуды К-го портрета, откуда монотонно связанная с отношением правдоподобия величина  (натуральный логарифм отношения правдоподобия)
(натуральный логарифм отношения правдоподобия)
где - весовые коэффициенты,
- весовые коэффициенты,
 - слагаемое смещения.
- слагаемое смещения.
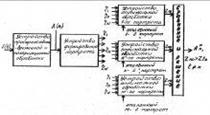
Рис.5. Структура устройства распознавания
Полученный алгоритм обработки свидетельствует о том, что оптимальная обработка некоррелированных портретов сводится к их взвешенному некогерентному накоплению со смешением, причем весовые коэффициенты и слагаемые смешения определяется априорно известными сведениями об эталонных портретах, т.е. сведениями об относительВнной интенсивности их комплексных амплитуд  . Структура устВнройства оптимальной обработки некоррелированного портрета показаВнна на рис 6.
. Структура устВнройства оптимальной обработки некоррелированного портрета показаВнна на рис 6.
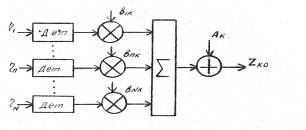
Рис. 6. Структура оптимальной обработки некоррелированного портрета
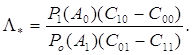
Представляет большой мировоззренческий и практический интеВнрес вопрос о целесообразности выбора весовых коэффициентов  и слагаемых смешения
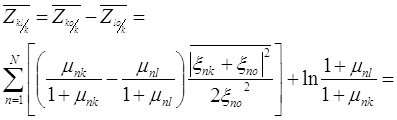
и слагаемых смешения  , рекомендуемого результатами проВнведенного синтеза устройств оптимальной обработки некоррелированВнных портретов. Для этого рассмотрим среднее значение случайной величины
, рекомендуемого результатами проВнведенного синтеза устройств оптимальной обработки некоррелированВнных портретов. Для этого рассмотрим среднее значение случайной величины  , лежащей в основе принятия решения, при условии наличия на входе устройства распознавания портрета К-го класса:
, лежащей в основе принятия решения, при условии наличия на входе устройства распознавания портрета К-го класса:
=
Вводя понятие дифференциальной контрастности -ых элементов K-го и L -го портретов
находим с учететом разложения 

Таким образом, при определенном выборе весовых коэффициентов  и слагаемого смещения , рекомендуемом результатами синтеза, случайная величина
и слагаемого смещения , рекомендуемом результатами синтеза, случайная величина  на выходе К-го канала при условии наличия портрета К-го класса в среднем всегда больше, чем на выВнходе любого другого канала, и, следовательно, с вероятностью больше 0,5 будет приниматься решения о наличии портрета К-го класВнса. При атом следует заметить, что только благодаря указанному выбору весовых коэффициентов и слагаемого смешения оптиВнмальная обработка некоррелированного портрета даже в условиях его относительной энергетической недостаточности будет приводить в большинстве случаев к его правильной классификации.
на выходе К-го канала при условии наличия портрета К-го класса в среднем всегда больше, чем на выВнходе любого другого канала, и, следовательно, с вероятностью больше 0,5 будет приниматься решения о наличии портрета К-го класВнса. При атом следует заметить, что только благодаря указанному выбору весовых коэффициентов и слагаемого смешения оптиВнмальная обработка некоррелированного портрета даже в условиях его относительной энергетической недостаточности будет приводить в большинстве случаев к его правильной классификации.
Структура устройств различения сигналов
Задача различения сигналов характерна для радиотехнических систем передачи информации. В то же вреВнмя для этих систем характерна так называемая задача разделения сигВнналов. Поясним некоторую терминологическую разницу задач различеВнния и разделения сигналов.
Задача разделения предполагает распределение сигналов по соотВнветствующим каналам многоканальных систем (по числу источников и потребитеВнлей передаваемых сообщений). Точное распределение сигналов по каВнналам необходимо для последующего воспроизведения содержащихся (закодированных) в сигналах передаваВнемых сообщений с наилучшими в статистическим смысле результатами, т.е. с наименьшими вероятностями ошибочного распределения сигналов (перепутывания) сигналов и с наибольшими вероятностями правильноВнго распределения сигналов.
Задача различения, аналогичная задача распознавания в радиоВнлокационных системах, воспринимается как задача формирования реВншения о классе принятого сигнала из М возможных. Таким образом, в задаче различения сигналов прагматическая цель разделения сигВнналов для последующей их обработки (декодирования) и воспроизведеВнния передаваемых сообщений как бы заВнслоняется (или замалчивается) и на передний план выставляется тольВнко задача эффективности разделения сигналов, что предполагает оценку качества решения задачи различения.
Поэтому, не забывая о прагматической цели разделения сигналов, ограничимся рассмотрением задачи их различения, которая с методолоВнгической точки зрения аналогична задаче распознавания. Учитывая, что временная, пространственная и поляризационная структура испольВнзуемых сигналов является когерентной и сильно коррелированной, а также полагая, что все сигналы являются энергетически эквивалентныВнми
приходим к выводу о том, что структура устройства различения M сигналов должна быть многоканальной (М каналов), а оптимальная обВнработка сигналов в каждом канале должна сводиться к их когерентному накоплению (фильтровому или корреляционному) с одинаковым смещением
или без смешения, если учесть, что в основе решения лежит случайная величина
устраняющая роль постоянного смещения в каналах (рис. 7).
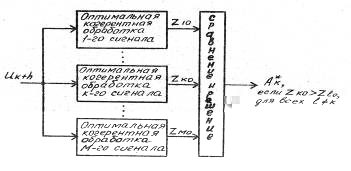
Рис. 7 Структура устройства различения М сигналов
Далее рассматриваются устройства различения сигналов по форВнме (закону модуляции), времени, частоте, пространству и поляризаВнции.
Различение сигналов по форме (закону модуляции) при фильтроВнвой обработке (рис 8,а) основано на использовании М согласованВнных фильтров, импульсные характеристики которых являются зеркальным отображением закона модуляции К-го сигнала:

Различение сигналов по форме (закону модуляции) при корреляВнционной обработке (рис. 8,6) основано на использовании М корВнреляторов, опорные сигналы которых промодулированы в соответствии с законами модуляции К-ых сигналов

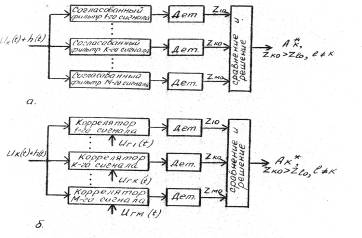
Рис. 8 Различение сигналов по форме (закону модуляции):
а) фильтровая обработка
б) корреляционная обработка
Следует отметить, что различаемые по форме сигналы перекрываВнются как по времени, так и по спектру.
Различение сигналов по времени при фильтровой обработке (рис.
9,а) основано на использовании одного согласованного фильтра,
импульсная характеристика которого согласована с законом модуляции
сигналов

и временной селекции сжатых и рассовмещённых по времени на величиВнну  сигналов.
сигналов.
Различение сигналов по времени по корреляционной обработке (рис. 9,б) основано на использовании М корреляторов, опорные сигналы которых с одинаковым законом модуляции

рассовмещены по времени относительно друг друга на величину  .
.
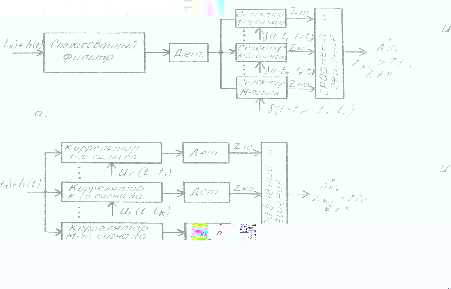
Рис 9. Различение сигналов по времени:
а) фильтровая обработка
б) корреляционная обработка
Различаемые по времени сложные сигналы перекрываются как по времени (частично), так и по спектру (полностью).
Различение сигналов по частоте (рис. 10) основано на испольВнзовании общего для М корреляторов смесителя-перемножителя (демодуВнлятора), осуществляющего сжатие по спектру принятых сигналов, и взаимно расстроенных узкополосных фильтров (радиоинтеграторов), осуВнществляющих расфильтровку рассовмещенных по спектру на величину  сигналов. Различаемые по частоте сложные сигналы перекрываются как по времени (полностью), так и по спектру (частичВнно).
сигналов. Различаемые по частоте сложные сигналы перекрываются как по времени (полностью), так и по спектру (частичВнно).
Различение сигналов по пространству (рис.11) основано на использовании многоканальной ФАР с М диаграммообразующими каналами (ДОК), каждый из которых формирует свою двумерную диаграмму направленности в дальней зоне Фраунгофера  или трехмерную диаграмму фокусировки (ДВ) в ближней зоне Френеля
или трехмерную диаграмму фокусировки (ДВ) в ближней зоне Френеля  размеры которой соответственно равны:
размеры которой соответственно равны:
 ,
, ,
,
Различение сигналов по поляризации (рис. 12) основано на исВнпользовании полного поляризационного приема с двумя взаимно ортогоВннальными по поляризации каналами в произвольном поляризационном базисе  , совпадающем с поляризационным базисом, коВнторый используется при формировании двух взаимно ортогональных по поляризации сигналов, подлежащих разделению.
, совпадающем с поляризационным базисом, коВнторый используется при формировании двух взаимно ортогональных по поляризации сигналов, подлежащих разделению.
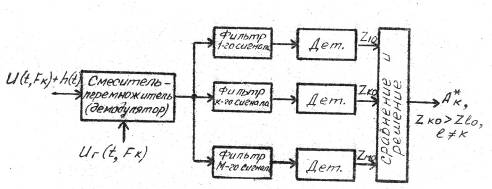
Рис.10. Различение сигналов по частоте
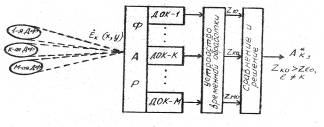
Рис.11. Различение сигналов по пространству
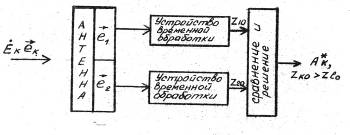
Рис. 12. Различение сигналов по поляризации
ЛИТЕРАТУРА
1. Охрименко А.Е. Основы извлечения, обработки и передачи информации. (В 6 частях). Минск, БГУИР, 2004.
2. Девятков Н.Д., Голант М.Б., Реброва Т.Б. Радиоэлектроника и медицина. тАУМн. тАУ Радиоэлектроника, 2002.
3. Медицинская техника, М., Медицина 1996-2000 г.
4. Сиверс А.П. Проектирование радиоприемных устройств, М., Радио и связь, 2006.
5. Чердынцев В.В. Радиотехнические системы. тАУ Мн.: Высшая школа, 2002.
6. Радиотехника и электроника. Межведоств. темат. научн. сборник. Вып. 22, Минск, БГУИР, 2004.
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы