Блок керування для блока первинного центрування зображення
Мiнiстерство освiти i науки Украiни
Вiнницький нацiональний технiчний унiверситет
РЖнститут автоматики, електронiки та комптАЩютерних систем управлiння
Кафедра лазерноi та оптоелектронноi технiки
БЛОК КЕРУВАННЯ ДЛЯ БЛОКА ПЕРВИННОГО ЦЕНТРУВАННЯ ЗОБРАЖЕННЯ
Пояснювальна записка з дисциплiни
"Цифровi пристроi та мiкропроцесори"
до курсового проекта за спецiальнiстю
"Лазерна i оптоелектронна технiка"
08-04.ЦПМП.000.00.000 ПЗ
Вiнниця ВНТУ 2009
Мiнiстерство освiти i науки Украiни
Вiнницький нацiональний технiчний унiверситет
Кафедра лазерноi та оптоелектронноi технiки
ЗАТВЕРДЖУЮ
Зав. каф. ФЕЛТ, д.т.н., проф.
РЖНДИВРЖДУАЛЬНЕ ЗАВДАННЯ
на курсовий проект з дисциплiни "Цифровi пристроi та мiкропроцесори"
Тема: Блок керування для блока первинного центрування зображення
Змiст графiчноi частини:
1. Блок-схема алгоритму розпiзнавання (формат А4)
2. Блок-схема алгоритму блока первиного центрування зображення (формат А4)
3. Синтезована блок тАУ схема алгоритму (формат А4)
4. Схема електрична структурна (формат А4)
5. Функцiональна схема (формат А4)
6. Схема електрична принципова (формат А4)
Змiст пояснювальноi записки:
Вступ, Аналiз та iнженерна iнтерпретацiя технiчного завдання, Розробка структурноi схеми, Розробка схеми_електричноi принциповоi, Розробка програмного забезпечення, Висновки,Лiтература.
ТЕХНРЖЧНЕ ЗАВДАННЯ
На розробку пристрою: Блок керування для блока первинного центрування зображення
1. Область застосування приладу: в пристроях автоматики, а також в цифрових обчислювальних машинах.
2. Основа для розробки тАУ робочий навчальний план дисциплiни "Цифровi пристроi та мiкропроцесори".
3. Мета та призначення розробки: а) мета розробки тАУ отримання практичних навичок розробки приладiв на основi цифрових пристроiв та мiкропроцесорiв; б) призначення розробки тАУ навчальний курсовий проект з дисциплiни ЦПМП.
4. Джерела розробки тАУ iндивiдуальне завдання на курсовий проект
5. Технiчнi вимоги
Вступ
Теоретичнi основи, методи та алгоритми розпiзнавання досить розповсюдженi для вирiшення рiзноманiтних задач автоматизацii виробництва, в тому числi, i в технологiчних роботизованих комплексах.
Цифрова обробка зображень набуваi великого значення в багатьох областях дiяльностi людини в даний час. Дiйсно, зображення як форма найбiльш повного представлення iнформацii не тiльки не можливо замiнити, наприклад, в такому винятковому випадку, як дослiдження поверхнi тiii або iншоi планети, але i в буденному життi. Воно i об'iктом дослiдження або його результатом в космонавтицi, астрономii, бiологii, медицинi, фiзицi, геологii, кримiналiстицi i дефектоскопii.
Зображення можна отримати не лише в дiапазонi частот електромагнiтного випромiнювання, що вiдповiдаi видимому свiтлу, але i в дiапазонi частот акустичному, iнфрачервоному, ультразвуковому, ультрафiолетовому, рентгенiвських i гамма-променiв. Засоби iх формування i реiстрацii вiдрiзняються великою рiзноманiтнiстю (фото- i оптико-електроннi сканери, радiолокацiйнi i лазернi пристроi). З iх допомогою можна, наприклад, отримати на Венерi зображення ii поверхнi або представити у видимiй формi людську мову.
Технiка передачi зображень досягла на даний час високого рiвня. Для передачi зображень використовуiться оптична, дротяна, радiо i iншi види зв'язку. Теоретично i експериментально доведена можливiсть високоякiсноi передачi вiдеоiнформацii на вiдстанi в декiлька десяткiв i навiть сотень мiльйонiв кiлометрiв. Технiчно здiйсненною представляiться в даний час i завдання створення глобальноi системи зв'язку для передачi зображень [1].
Висока ступiнь вiрогiдностi розпiзнання, перш за все, залежить вiд правильноi органiзацii тiсно повтАЩязаних мiж собою систем вiдчуття та iнтелектуалiзацii управлiння.
Отже, при розробцi гнучких робототизованих комплексiв ставлять за мету створення ефективних сенсорних систем та алгоритмiв обробки iнформацii. РЖнформацiю, необхiдну для виконання цього завдання, забезпечуi система вiдчуття тАУ найголовнiша пiдсистема адаптивного робота, джерелом iнформацii для якоi служить система технiчного зору (СТЗ).
У звтАЩязку з тим, що СТЗ забезпечують найбiльш високу iнформативнiсть щодо сприйняття, аналiзу та обробки зображень, область застосування таких систем досить широка: автоматизацiя операцiй збирання, вiзуального контролю, дефектоскопiя деталей, вузлiв тощо [2-4].
1. Аналiз теми i iнтерпретацiя технiчного завдання
Визначальним фактором для виконання функцiй СТЗ у реальному часi i ознаки, за якими виконуiться iдентифiкацiя об'iктiв, що здебiльшого повтАЩязано з необхiднiстю виконання великого обсягу машинних процедур, в тому числi, наявностi в ЕОМ великого обсягу оперативноi та iнших видiв памтАЩятi.
Перспективними в СТЗ для промислових роботiв i рiзнi алгоритми, якi дозволяють створювати еталони на етапi навчання для певних положень обтАЩiкта або особливостей (симетрii) самого обтАЩiкта. В якостi еталонiв можуть бути не лише окремi ознаки, а шаблони зображень, для iдентифiкацii яких виконують накладення зображення на еталон. У загальному виглядi процедура складаiться з об'iднання результатiв аналiзу зображень або iх геометричних особливостей [1-5].
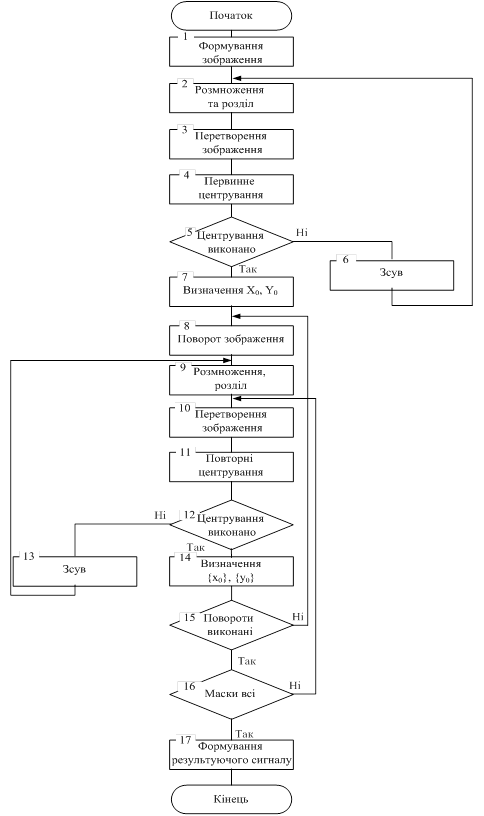
В данiй роботi увага придiлена особливостям розпiзнавання симетричних об'iктiв за моментними ознаками з формуванням еталонiв об'iктiв [6-9]. Сам процес формування результуючих сигналiв класифiкацii вхiдних зображень об'iктiв передбачаi такi етапи розпiзнавання (рис. 1).
Вiдомо, що пiдхiд до вибору математичноi моделi зображення передбачаi спосiб опису зображення, при цьому наскiльки унiверсальним i спосiб опису зображення, настiльки простiшим буде видiлення системи ознак, якi мiстять iнформацiю про зображення [8, 10-13]. Джерелом iнформацii поля зору СТЗ служить свiтловий потiк, який в даному разi описуiться функцiiю яскравостi. Отже, на виходi системи формування зображень утворюiться вiдеосигнал, що вiдповiдаi яскравостi обтАЩiкта, який знаходиться в полi зору. Тому функцiiю такоi "iнтелектуалiзацii" i обтАЩiднання процедур обробки зображень оптичними блоками та формування вiдповiдних сигналiв блоком керування з врахуванням певних особливостей (симетрii) зображень [14,15].
Первинне центрування дозволяi визначити центр тяжiння обтАЩiкта

Рисунок. 1 - Етапи розпiзнавання
Тому, в даному курсовому проектi буде проведена оптимiзацiя пристрою керування для системи розпiзнавання зображень за його геометричними ознаками iз видiленням симетричностi зображень обтАЩiктiв.
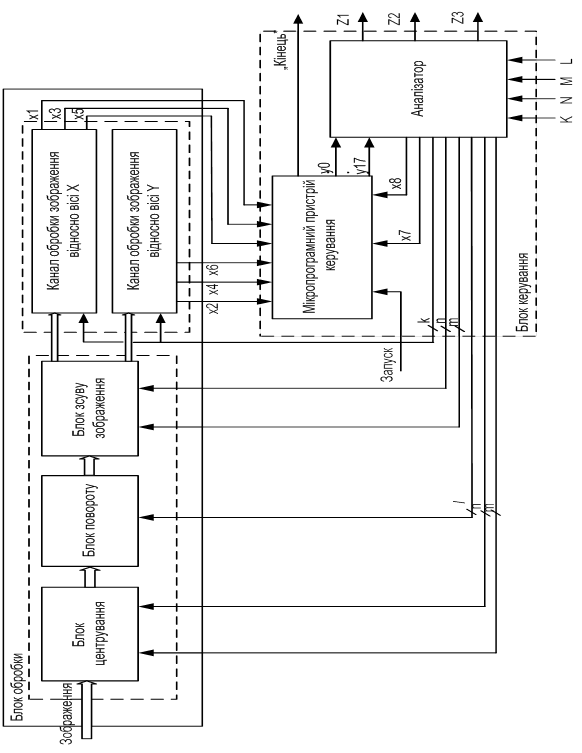
2. Розробка структурноi схеми розпiзнавання зображень
Розроблена структурна схема системи розпiзнавання зображень наведена у Додатку А.
Система, яка реалiзуi формування еталонiв симетричних зображень у пpoцeci розпiзнавання останнiх, складаiться з оптичного блока обробки (БО), який мiстить перший блок зсуву (центрування) з проектувальною оптикою, блок повороту зображення, другий блок зсуву, два канали обробки зображень, кожен з яких мiстить мультиплiкатор свiтлового потоку, формувач сигналiв статичних моментiв, i блока керування.
Робота системи починаiться з подання сигналу "Запуск" на блок керування, в який по вiдповiдним шинам записуються вхiднi величини: N - кiлькiсть стовпцiв; М тАФ кiлькiсть рядкiв зсуву зображення; L - число поворотiв зображень; К - число комплектiв масок. Блок керування на вiдповiдному виходi формуi спочатку адреси у блоках змiни комплектiв тiньових масок, що вiдповiдають визначенню та зрiвноважуванню статичних моментiв першого порядку. Пiсля завершення первинного центрування у двох формувачах для здiйснення повторних центрувань блоком керування будуть сформованi конкретнi адреси комплектiв масок, якi однозначно вiдповiдають визначенню та зрiвноважуванню статичних моментiв бiльш високих порядкiв.
Система дозволяi обробляти бiнарнi й напiвтоновi зображення, для яких градацii яскравостi вхiдного зображення мають центральну симетрiю (якщо розпiзнаiться центральносиметричне зображення) або осьову (зображення з осьовою симетрiiю). Первинне та повторне центрування можуть виконуватися оптичною системою першого блока зсуву з можливiстю керованого зсуву за двома напрямками (двовимiрнi регiстри зсуву) або за допомогою акустооптичних пристроiв (двокоординатний акустооптичний пристрiй вiдхилення). Якщо нociiм iнформацii про зображення i об'iктив або рефлектор, то можна застосовувати акустооптичнi рефлектори або пристроi для керування сигналом зсуву [16].
Оптичнi зв'язки мiж блоками системи (мiж першим блоком зсуву з проекцiювальною оптикою, блоком повороту зображення, другим блоком зсуву, мiж виходами мультиплiкатора, блоком змiни масок i оптичних перетворювачiв) можуть забезпечуватися безпосереднiм оптичним з'iднанням та узгодженням ix входiв або ж за допомогою волоконно-оптичних каналiв зв'язку чи волоконно-оптичних джгутiв [17,18].
Отже, блок керування роздiлений на два функцiонально-самостiйнi пристроi МПК та aналiзатоp, що даi можливiсть кожний з цих пристроiв синтезувати окремо з орiiнтацiiю на перспективну елементну базу - ПЛРЖС.
2.1 Розробка блоку керування
Розроблена схема електрична-функцiональна блоку керування наведена у Додатку Б.
Особливiстю блока керування для даноi системи i можливiсть виконання ним не тiльки функцiй керування, але й попередньоi обробки iнформацiй про вхiдний вiдеосигнал, в результатi чого формуються ознаки симетричностi зображення.
Блок керування складаiться з двох частин: мiкропрограмного пристрою керування МПК та аналiзатора симетричностi об'iктiв. До складу МПК входять такi базовi вузли: програмоване ПЗП ROM, регiстр RG, дешифратори DC, генератор тактових iмпульсiв ГТРЖ, тригер Т i логiчнi елементи. Аналiзатор мiстить шiсть лiчильникiв СТ, дешифратор DC, чотири мiкросхеми ОЗП RAM, два компаратори СОМ, три тригери Т i логiчнi елементи. Роздiлення структури блока керування на два функцюнально-самостiйних пристроi, МПК й аналiзатор, зумовлене не тiльки специфiкою використання у СТЗ, але й необхiднiстю перепрограмування блока керування в процeсi розширення функцiональних можливостей системи розпiзнавання. Структура та методика синтезу МПК загальновiдомi [19,20].
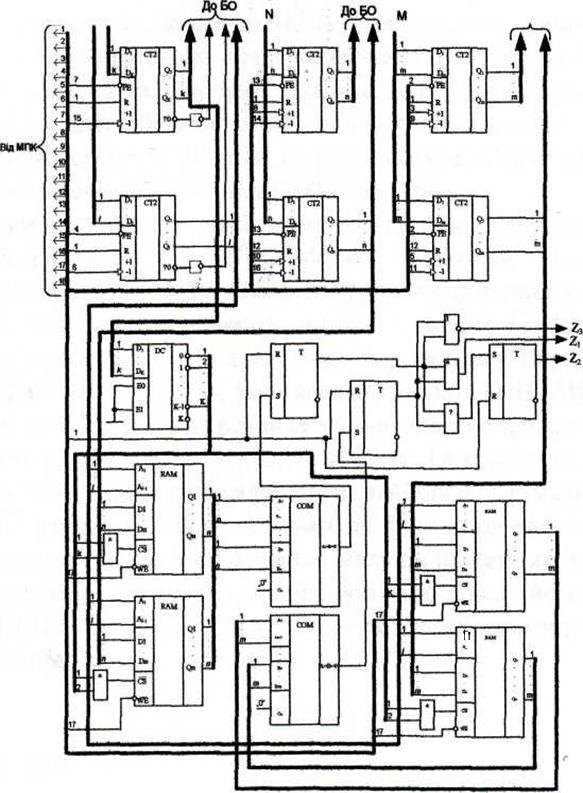
2.2 Розробка схеми електричноi-функцiональноi аналiзатора симетричностi об'iктiв
Розроблена схема електрична-функцiональна аналiзатора симетричностi об'iктiв наведена у Додатку В.
В аналiзаторi симетричностi об'iктiв шiсть лiчильникiв задiянi таким
чином: один з лiчильникiв використовуiться для органiзацii циклу змiни i-гo комплекту тiньових бiнарних масок; другий лiчильник i лiчильником кiлькостi поворотiв, в якому початково записуiться величина L = 90/∆φ, де ∆φ - крок повороту, i який використовуiться для органiзацii циклу повороту зображення; третiй та четвертий лiчильники фiксують координати точки вiдлiку А1 (XI, Y1) зображення вздовж осей X i Y вiдповiдно в процесi первинного центрування вхiдного зображення; останнi два лiчильники фiксують величини ∆xl, ∆х2,.. ∆хk-1, та ∆yl, ∆у2,.. ∆уk-1 зсуву зображення вздовж осей X i Y в1дповiдно в процесi повторних центрувань вхiдного зображення.
Чотири схеми ОЗП RAM використовуються для зберiгання величини зсуву вздовж осей X i Y вiдповiдно до комплекту масок при певних кутах повороту, причому, адреса комплекту масок використовуiться для вибору необхiдноi мiкросхеми ОЗП, а адреса кута повороту i адресою, за якою записуiться певна iнформацiя з вiдповiдних лiчильникiв в ОЗП.
Вихiдними сигналами для аналiзатора i результуючi сигнали Z1,72, Z3:
Ø одиничне значення сигналу Z1 свiдчить про центральну симетрiю зображення;
Ø одиничне значення сигналу Z2 свiдчить про осьову симетрiю зображення;
Ø одиничне значення сигналу Z3 фiксуi несиметричнiсть зображення.
Структура аналiзатора мiстить такi компоненти, як дешифратори,
лiчильники та запам'ятовуючi пристроi. Бiльшiсть ПЛРЖС мiстить бiблiотеки таких макроелементiв, що значно скорочуi час ix програмування. Але основну складнiсть реалiзацii схеми аналiзатора в елементному базисi ПЛРЖС представляють собою елементи ОЗП, тому доцiльно схему аналiзатора подiлити на двi частини: одна з яких складаiться з таких базових елементiв, як дешифратори та лiчильники, а iнша - зi схем компараторiв та ОЗП [24].
3. Розробка алгоритмiчноi частини розпiзнавання зображення
3.1 Розробка загального алгоритму розпiзнавання
Для обробки вхiдного вiдеосигналу з подальшим формуванням еталонiв попередньо здiйснюють первинне та повторнi центрування за моментними ознаками, якi реалiзованi за допомогою способу розпiзнавання симетричних зображень об'iктiв, блок-схема алгоритму якого показана на додатку Д. Процедура, що подаiться в кожнiй операторнiй вершинi даноi блок-схеми, вiдповiдаi макрооперацii, реалiзованiй у системi розпiзнавання [14,15].
У даному курсовому проектi буде розроблятись блок первинного центрування зображення.
Первинне центрування дозволяi визначити центр тяжiння обтАЩiкта.
Введене зображення об'iкта з вхiдною орiiнтацiiю (оператор 1) формуiться у виглядi свiтлового потоку. Свiтловий потiк розмножуiться й роздiляiться на два рiвних потоки (оператор 2) та обробляiться у двох каналах. Для цього кожен з мультиплiкованих свiтлових потокiв пропускають через тiньовi бiнарнi маски, що дозволяi здiйснити просторову модуляцiю зображення (оператор 3). Модуляцiя здiйснюiться за допомогою комплекту тiньових масок, що сприяють виконанню первинного центрування (оператор 4), тобто визначенню зважених сум iнтенсивностей зображення i iхньому порiвнянню (оператор 5). При рiвностi зважених сум iнтенсивностей зображення (оператор 7), фiксуiться певна iнформацiя, що вiдповiдаi тому чи iншому еталону класу симетрii. В протилежному випадку здiйснюiться зсув зображення (оператор 6) з виявленням додаткових ознак для формування певного еталону симетричного зображення.
3.2 Розробка прошивки ПЗП
Закодуiмо умовнi вершини блок тАУ схеми алгоритму блока первинного центрування зображення (Додаток Б).
У додатку В представлено закодовану блок тАУ схему алгоритму блока первинного центрування зображення, де Y- мiкрооперацii керуючих сигналiв, Х- умовнi вершини. Робимо таблицi кодувальних мiкрооперацiй в залежностi вiд iх розташування в пiд полях.
Таблиця 4.1
| Двiйковий код | Y1 | Y2 | Y 3 |
| 0001 | y0 | y1 | y2 |
| 0010 | y3 | y6 | y7 |
| 0011 | y4 | y5 | y8 |
| 0100 | y9 | y17 | y15 |
| 0101 | F |
Складемо прошивку ПЗП. Прошивка ПЗП тАУ це послiдовнiсть мiкрокоманд, яка маi виконуватись починаючи вiд початку до кiнця роботи алгоритму.
Таблиця 4.2
| немаi Х | 0000 |
| X1 | 0001 |
| Х2 | 0010 |
| Х3 | 0011 |
| Х4 | 0100 |
| Х5 | 0101 |
| Х6 | 0110 |
| Х7 | 0111 |
| Х8 | 1000 |
Таблиця 4.3
| Адреса | Y1 | Y2 | Y3 | Х | А0 | А1 |
| 00000 | 0001 | 0000 | 0000 | 0000 | 0001 | 0001 |
| 00001 | 0010 | 0001 | 0001 | 0000 | 0010 | 0010 |
| 00010 | 0000 | 0000 | 0000 | 0001 | 0010 | 0011 |
| 00011 | 0000 | 0000 | 0000 | 0010 | 0011 | 0100 |
| 00100 | 0000 | 0000 | 0000 | 0011 | 1001 | 0101 |
| 00101 | 0000 | 0000 | 0000 | 0100 | 0110 | 1100 |
| 00110 | 0000 | 0000 | 0000 | 0110 | 1000 | 0111 |
| 00111 | 0000 | 0000 | 0010 | 0000 | 0101 | 0101 |
| 01000 | 0000 | 0010 | 0000 | 0000 | 01010 | 0101 |
| 01001 | 0000 | 0000 | 0000 | 0101 | 1011 | 1010 |
| 01010 | 0011 | 0000 | 0000 | 0000 | 0100 | 0100 |
| 01011 | 0000 | 0011 | 0000 | 0000 | 0100 | 0100 |
| 01100 | 0100 | 0000 | 0011 | 0000 | 1101 | 1101 |
| 01101 | 0000 | 0000 | 0000 | 0111 | 10001 | 1110 |
| 01110 | 0000 | 0100 | 0000 | 0000 | 1111 | 1111 |
| 01111 | 0000 | 0000 | 1000 | 0000 | 10000 | 10000 |
| 10000 | 0000 | 0000 | 0000 | 1000 | 1110 | 10001 |
| 10001 | 0101 | 0000 | 0000 | 0000 | 0000 | 0000 |
Висновки
В даному курсовому проектi було розроблено блок керування для блока первинного центрування зображення. Було докладно розглянуто сучасний стан питання у данiй областi технiки, принцип дii як всього пристрою, так i його окремих структурних блокiв. Розглянуто структурну органiзацiю пристрою, проаналiзовано можливу реалiзацiю структурних блокiв.
Особливiстю структурноi органiзацii блока керування для запропонованоi системи розпiзнавання зображень, який виконуi не лише функцiю керування, а також попередню обробку зображень, зумовлюi роздiлення його на два функцiонально-самостiйнi пристроi: мiкропрограм ний пристрiй керування та аналiзатор, якi, в свою чергу, достатньо вдало можна реалiзувати на перспективний елементнiй базi - програмованих логiчних IС (ГОПС).
Також було подано докладний алгоритм роботи розпiзнавання зображення.
Лiтература
1. Анисимов Б.В., Курганов В.Д., Злобин В.К. Распознавание и цифровая обработка изображений. тАУ М.: Высшая школа, 1983. тАУ 295 с.
2. Куафе Ф. Взаимодействие робота с внешней средой: Пер. с франц. - М.: Мир, 1985. тАУ 285 с.
3. Путятин Е.П., Аверин С.И. Обработка изображений в робототехнике. тАУ М.: Машиностроение, 1990. тАУ 318 с.
4. Генкин В.Л., Ерош И.Л., Москалев Э.С. Системы распознавания автоматизированных производств. тАУ Л.: Машиностроение. Ленинградское отделение, 1988. тАУ 246 с.
5. Системы очувствления и адаптивные промышленные роботы / Под общей ред. Е.П. Попова и В.В. Клюева. тАУ М.: Машиностроение, 1985. тАУ 256 с.
6. Буда А.Г. Мартынюк Т.Б., Лищинская Л.Б. Структурный переход от исходных признаков к результативным на этапах предварительной обработки изображений // Науково-технiчна конференцiя "Приладобудування-96". Ч.1. тАУ Винница-Судак, 1996. тАУ С. 127.
7. Буда А.Г., Мартынюк Т. Б. Конструирование моментных признаков на этапах распознавания классов и подклассов изображений // 3-я Украiнська конф. з автоматичного керування "Автоматика-96". тАУ Севастополь: СевГТУ, 1996. тАУ С. 156-157.
8. Буда А.Г. Розробка моделей та дослiдження прикладних методiв обробки геометричних зображень на пiдставi моментних характеристик: Автореферат дис.. канд. тех. наук: 05.13.16 / Вiнниц. полiтехн. iн-т. тАУ Вiнниця, 1993. тАУ 23 с.
9. Буда А.Г., Мартинюк Т.Б., КожемтАЩяко А.В. Створення еталонiв класiв та пiдкласiв зображень на пiдставi моментних ознак // Працi Третьоi Всеукраiнськоi мiжнародноi конференцii "УкрОБРАЗ-96". тАУ Киiв, 1996. тАУ С. 79-81.
10. Buda A., Martyniuk T., Buda S. Methods of representation of the symmetric images in devices of recognition, in Selected Paper from the International Conference on Optoelectronic Information Technologies, Proceeding of SPIE/ Vol. 4425 (2001), pp. 70-75.
11. Буда А.Г., Мартинюк Т.Б., Кормановський С.РЖ., Король О.В. Базис геометричних ознак зображень та особливостi iх застосування // Матерiали МНПК "Сучаснi проблеми геометричного моделювання". тАУ Львiв, 2003. тАУ С. 162-166.
12. Буда А.Г., Мартинюк Т.Б. Ознаковий простiр моментних характеристик при розпiзнаваннi класiв i пiдкласiв симетричних зображень//Вiсник ВПРЖ тАУ 2007. тАУ №1 тАУ С. 61-66.
13. Буда А.Г., Мартинюк Т.Б., Король О.В. Створення множини ознак при аналiзi правильних зображень // Працi Восьмоi Всеукраiнськоi мiжнародноi конференцii "УкрОБРАЗ-2006". тАУ Киiв, 2006. тАУ С.111-113.
14. Патент Украiни №3741, кл. G06К9/58, G06К9/52 Спосiб розпiзнавання симетричностi зображень обтАЩiктiв i пристрiй для його реалiзацii/ В. П. КожемтАЩяко, В.Г. Красиленко, Т.Б. Мартинюк, А.Г. Буда. тАУ №93321261; Заявлено 16.03.93; Опубл. 27.12.94, Бюл. № 6-1. тАУ 35 с.
15. Патент Украiни 52678, кл. G06К9/00, G06К9/58, G06К9/52. Пристрiй для розпiзнавання симетричностi зображень обтАЩiктiв/А.Г. Буда, Т.Б. Мартинюк, А.В. КожемтАЩяко, В.РЖ. Андрущенко. тАУ № 99021033; Заявлено 23.02.99; Опубл. 15.01.2003, Бюл. № 1.тАУ32с.
16. Семенов А.С., Смирнов В.Л., Шмалько А.В. Интегральная оптика для систем передачи и обработки информации. тАУ М.: Радио и связь, 1990. тАУ 224 с.
17. Волоконно-оптические системы передачи информации и кабели : Справочник / И.И. Гроднев и др. тАУ М.: Радио и связь, 1993. тАУ 246 с.
18. КожемтАЩяко В.П., Павлов С.В., Мартинюк Т.Б., Лисенко Г.Л. Волоконно-оптичнi структури комутацii та передачi iнформацii. Навч. посiбник. тАУ Вiнниця: ВДТУ, 2002. тАУ 106 с.
19. Каган В.М. Электронные вычислительные машины и системы: Учеб. пособие для вузов. тАУ М.: Энергоатомиздат, 1991. тАУ 592 с.
20. Апраксин Ю.К. Теория и проектирование ЭВМ. Синтез управляющих автоматов: Учебное пособие. тАУ К.: РЖСДО, 1993. тАУ 80 с.
21. Баранов С.И. Синтез микропрограммных автоматов тАУ Л.: Энергия, 1979.
22. Арсеньев Ю.Н., Журавлев В.М. Проектирование систем логического управления на микропроцессорных средствах: Учебное пособие. тАУ М. : Высшая школа, 1991. - 319 с.
23. Мартынюк Т.Б., Кожемяко А.В., Вербицкий И.А, Фофанова Н.В. Реализация анализатора симметричности зображений в элементном базисе ПЛИС FLEX 10K // Вимiрювальна та обчислювальна технiка в технологiчних процесах: Збiрник наукових праць. тАУ Хмельницький:ТУП, 2001. тАУ Вип. №8 (2001) тАУС.55-58.
24. Буда А.Г., Мартынюк Т.Б., Лысенко Г.Л. Техническая реализация признаков, полученных на основе исследования функциональных характеристик // Оптико-електроннi iнформацiйно-енергетичнi технологii. тАУ 2002. тАУ № 2(4).тАУ С. 71-77.
25. Мартинюк Т.Б., Фофанова Н.В., Шеляков О.Л. Реалiзацiя блока керування на R-автоматi в елементному базисi ПЛРЖС//Вiсник ВПРЖ. тАУ 2002.- №2. тАУ С.51-55.
26. Лисенко Г.Л., Мартинюк Т.Б., Фофанова Н.В. Особливостi реалiзацii в елементному базисi ПЛРЖС мiкропрограмних R- автоматiв // Вiсник ЖРЖТРЖ. Спецвипуск. тАУ 2002. тАУ С. 203-206.
27. Буда А.Г., Мартынюк Т.Б., Буда С.А. Методы представления симметричных изображений в устройстве распознавания // Збiрник тез доповiдей МНТК "Оптоелектроннi iнформацiйнi технологii. Photonics тАУ ODS2000". тАУ Вiнниця: "Унiверсум-Вiнниця", 2000. тАУ С. 37-39.
28. Буда А.Г., Мартынюк Т.Б., Король О.В. Алгоритм сжатия изображения и его классификационные признаки // Збiрник наукових праць "Геометричне та комптАЩютерне моделювання". Вип. 8. Харкiвський державний универсистет харчування та торгiвлi. тАУ Харкiв, 2005. тАУ С. 205-210.
29. Буда А.Г., Мартинюк Т.Б., Лисенко Г.Л., Король О.В., Буда С.А. Математичнi моделi аналiзу контурiв плоских симетричних зображень // Працi ПтАЩятоi Всеукраiнськоi мiжнародноi конференцii "УкрОБРАЗ-2000". тАУ Киiв, 2000. тАУ С.221-222.
30. Буда А.Г., Мартинюк Т.Б. Король О.В. Створення модифiкацii математичноi моделi на пiдставi геометричних моментiв // Материалы Второй украинско-российской научно-практической конференции "Современные проблемы геометрического моделирования". тАУ Харьков, 2007. тАУ С. 205-210.
ДОДАТКИ
Додаток А
Структурна схема системи розпiзнавання
Додаток Б
Мiкропрограмний пристрiй керування

Додаток В
Аналiзатор симетричностi об'iктiв
Додаток Г
Блок-схема алгоритму розпiзнавання
Вместе с этим смотрят:
IP-телефония. Особенности цифровой офисной связи