Линзовая антенна РЛС и ППФ
Неотъемлемыми составными частями современных радиотехнических средств являются антенные системы и обслуживающие их тракты СВЧ.
К антеннам современных радиосистем предъявляют много требований, среди которых решающее значение имеют два. Первое требование тАУ направленность действия, т.е. распределение электромагнитной мощности в пространстве по определенному закону. Второе требование тАУ излучение или радиоприем должны сопровождаться минимальными потерями электромагнитной мощности на нагрев проводников и диэлектриков антенны, т.е. антенна должна иметь высокий КПД.
Цель данной курсовой работы является систематизирование знаний, полученных при изучении дисциплин ВлАнтенны и устройства СВЧВ» и ВлРаспространение радиоволнВ». Для чего необходимо рассчитать линзовую антенну, исследовать ее, и спроектировать полосовой фильтр.
2 Основная часть
2.1 Обзор по РЛС
Радиолокация (от радио.. и лат. locatio - размещение, расположение), область науки и техники, предметом которой является наблюдение радиотехническими методами (радиолокационное наблюдение) различных объектов (целей) - их обнаружение, распознавание, измерение их координат (определение местоположения) и производных координат и определение др. характеристик. Под радиолокацией понимают также сам процесс радиолокационного наблюдения (локации) объектов. Задачи радиолокации решаются при помощи отдельных радиолокационных станций (РЛС) и сложных радиолокационных систем. Радиолокация - одно из важнейших направлений современной радиоэлектроники.
Для радиолокационного наблюдения используют: эхо-сигналы, образующиеся в результате отражения радиоволн от объекта, облученного РЛС; сигналы РЛС, переизлучаемые ретранслирующим устройством, находящимся на объекте, местоположение которого определяется; собственное радиоизлучение объекта - излучение радиоустройств, находящихся на объекте, или тепловое излучение самого объекта, определяющееся его температурой (пассивная радиолокация). Так, в наземных РЛС обнаружения воздушных целей, ожидаемых на некоторой высоте, для рационального использования мощности, излучаемой антенной, выбирают антенны с такой диаграммой направленности, чтобы во всём рабочем секторе обеспечивалось постоянство принимаемых сигналов независимо от дальности.
В радиолокации измеряют расстояние до объекта, направление прихода сигналов (пеленгация), радиальную и угловую скорости движения объекта и т.д. Радиолокационное наблюдение объектов позволяет также выявлять их многие характерные особенности, например, определять параметры ледового покрова водной поверхности, влагосодержание атмосферы, размеры и конфигурацию объекта и т.п. Данные измерений могут быть дискретными (вырабатываемыми через определённые интервалы времени) или непрерывными.
При помощи радиолокаторов обнаруживаются облака, осадки, области повышенных градиентов температуры и влажности, ионизированные следы молниевых разрядов и др. Из радиолокационных наблюдений получают информацию о пространственном положении, перемещении, структуре, форме и размерах обнаруживаемых объектов, а также их физических свойствах.
Появление и развитие радиолокации
Явление отражения радиоволн наблюдал ещё Г. Герц в 1886 - 89. Влияние корабля, пересекающего трассу радиоволн, на силу сигнала зарегистрировал А. С. Попов в 1897. Впервые идея обнаружения корабля по отражённым от него радиоволнам была четко сформулирована в авторской заявке немецкого инженера К. Хюльсмайера (1904), содержавшей также подробное описание устройства для её реализации.
Интерференцию незатухающих радиоволн, приходящих к приёмнику по двум путям - от передатчика и, после отражения, от движущегося судна, - впервые наблюдали американский инженер А. Тейлор и Л. Юнг в 1922, а интерференцию при отражении радиоволн от самолёта - американский инженер Б. Тревор и П. Картер в 1932.
В СССР работы по радиолокации были развёрнуты с 1933 по инициативе М. М. Лобанова, под руководством Ю. К. Коровина и П. К. Ощепкова. Первые практически использовавшиеся РЛС, действие которых было основано на появлении биений при пересечении самолётом линии передатчик - приёмник, разработаны под руководством Д. С. Стогова в 1938. Импульсный метод Р. разработан в 1937 в Ленинградском физико-техническом институте под руководством Ю. Б. Кобзарева.
Последующее развитие радиолокации, её внедрение в различные виды вооружения и народное хозяйство связаны с освоением диапазона СВЧ, совершенствованием методов радиолокации, внедрением вычислительной техники и использованием достижений смежных наук. Особое значение имела разработка радиолокационных измерительных устройств для зенитной и корабельной артиллерии. Появление и применение противорадиолокационных средств - пассивных и активных помех, защитных покрытий, вызвали необходимость разработки специальных противопомеховых методов и устройств.
Появление (в 50 - 60-х гг.) ракетной и космической техники усложнило и расширило задачи радиолокации. Создание ракет и космических летательных аппаратов (КЛА) потребовало точного измерения траектории и параметров их движения с целью управления ими, прогнозирования траектории точной посадки КЛА на Землю и др. планеты, точной географической привязки количественных результатов научных измерений, данных метеорологической обстановки, фотоснимков и т.п. к координатам КЛА, измерения взаимного положения КЛА. Одно из достижений радиолокации - решение задачи поиска и сближения двух КЛА, включая их автоматическую стыковку.
Важная область применения радиолокации - планетная радиолокация, позволившая путём приёма радиосигналов, отражённых от планет, с большой точностью измерить расстояние до них и тем самым снизить погрешность в определении основной астрономической единицы,уточнить параметры орбит планет, определить период вращения планет и осуществить радиолокационное наблюдение рельефа поверхности планет.
При создании систем противоракетной обороны (ПРО) радиолокация должна решать сложные задачи, связанные с уничтожением ракет противника, в том числе с обнаружением и сопровождением ракет и наведением на них противоракет.
2.2 Назначение и принцип действия линзовых антенн
Линзовой антенной называют совокупность электромагнитной линзы и облучателя. Они относятся к антеннам оптического типа и используются, как правило, в диапазоне сантиметровых и дециметровых волн для создания достаточно узких диаграмм направленности. В некоторых случаях линзовая антенна может использоваться в качестве вспомогательного элемента какой-либо антенны, улучшающего ее характеристики (например, для выравнивания фазы в раскрыве рупорной антенны). Линзовая антенна представляет собой прозрачное для радиоволн ограниченное обычно двумя поверхностями тело, коэффициент преломления которого отличен от коэффициента преломления окружающей среды [1].
Назначение линзы состоит в том, чтобы трансформировать соответствующим образом фронт волны, создаваемый облучателем. Изменяя форму волновой поверхности, линза тем самым формирует некоторую диаграмму направленности.
Принципиально линзовые антенны можно использовать для формирования различных диаграмм направленности. Однако на практике линзовые антенны подобно оптическим линзам применяются, главным образом, для превращения расходящегося пучка лучей в параллельный, то есть для превращения криволинейной (сферической или цилиндрической) волновой поверхности.
Как известно, плоский фронт волны при его достаточной площади обеспечивает острую направленность излучения. С помощью линзовых антенн можно получить диаграмму направленности с углом раствора всего лишь в несколько угловых минут.
Принцип действия линзы основан на том, что линза представляет собой среду, в которой фазовая скорость распространения электромагнитных волн либо больше скорости света ( ), либо меньше ее (
), либо меньше ее ( ). В соответствии с этим линзы разделяются на ускоряющие () и замедляющие ().
). В соответствии с этим линзы разделяются на ускоряющие () и замедляющие ().
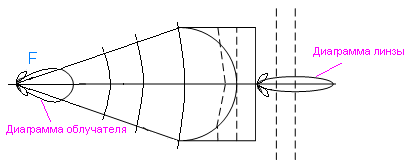
Рисунок 2.1 тАУ Вогнутый профиль ускоряющей линзы
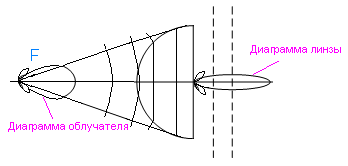
Рисунок 2.2 - Выпуклый профиль замедляющей линзы
В ускоряющих линзах выравнивание фазового фронта волны (пунктирные линии на рисунках 2.1 и 2.2) происходит за счет того, что участки волновой поверхности часть своего пути проходят в линзе с повышенной фазовой скоростью. Эти участки пути различны для разных лучей. Чем сильнее луч отклонен от оси линзы, тем больший участок пути он проходит с повышенной фазовой скоростью внутри линзы. Таким образом, профиль ускоряющей линзы должен быть вогнутым (рисунок 2.1).
В замедляющих линзах, наоборот, выравнивание фазового фронта происходит не за счет убыстрения движения периферийных участков волновой поверхности, а за счет замедления движения середины этой поверхности. Следовательно, профиль замедляющей линзы должен быть выпуклым (рисунок 2.2) [2].
2.3 Выбор размеров линзы
В ряде случаев требуется обеспечить качание главного лепестка диаграммы направленности в широком угле (порядка нескольких десятков градусов). Для этой цели можно перемещать всю линзовую антенну на требуемые углы. Однако этот способ в большинстве случаев непригоден из-за больших размеров и веса антенны. Более желательным является качание диаграммы направленности посредством смещения облучателя при неподвижной линзе.
Смещение облучателя из фокуса в направлении, перпендикулярном оси линзы, вызывает отклонение главного лепестка диаграммы направленности в сторону, противоположную направлению смещения облучателя. Однако в обычных линзах такое отклонение без искажения формы диаграммы направленности возможно только в пределах малого угла (приблизительно равного удвоенной ширине диаграммы направленности линзы). При значительном смещении облучателя диаграмма направленности, отклоняясь на большой угол, вместе с тем искажается. Для того чтобы эти искажения были минимальными, применяются специальные линзы, одной из которых и является цилиндрическая линза Люнеберга.
Цилиндрическая линза, предложенная в 1944 г. Люнебергом, представляет собой вариант неоднородной линзы, позволяющий осуществить неискаженное качание луча на любой угол. Она состоит из двух круглых металлических пластин, образующих основания цилиндра, пространство между которыми заполняется диэлектриком [2].
На рисунке 2.3 представлен эскиз цилиндрической линзы Люнеберга

Рисунок 2.3 тАУ Эскиз цилиндрической линзы Люнеберга
На рисунке 2.4 изображено продольное сечение одного из образцов линзы
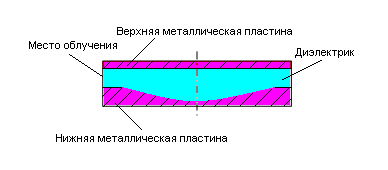
Рисунок 2.4 тАУ Продольное сечение линзы
Из условия получения указанной на проектирование ширины диаграммы направленности в горизонтальной плоскости  вычислим ширину линзы по формуле:
вычислим ширину линзы по формуле:
 ,
,
где  - ширина ДН по уровню 0.5 в плоскости направляющей;
- ширина ДН по уровню 0.5 в плоскости направляющей;
 м - рабочая длина волны.
м - рабочая длина волны.
 м
м
Коэффициент преломления линзы вычислим следующим образом
 ,
,
где  - коэффициент преломления диэлектрика;
- коэффициент преломления диэлектрика;
 - расстояние между пластинами.
- расстояние между пластинами.
Коэффициент преломления определяется материалом, из которого изготовлена линза. Для линз из естественного диэлектрика он обычно равен  [1].
[1].
Таким образом,
 м
м

2.4 Расчет облучателя
Всякая линзовая антенна состоит из двух основных частей: облучателя и собственно линзы. Облучателем может быть любой однонаправленный излучатель. Важно, чтобы большая часть энергии излучения попадала на линзу, а не рассеивалась в других направлениях. Так как облучатель является важнейшим элементом линзовой антенны, в значительной степени определяющим ее параметры, то расчет обычно начинается с выбора облучателя. Основными критериями для его выбора являются рабочая длина волны, требования к диапазонности, тип фидера, величина подводимой мощности.
Облучатели в виде открытого конца волновода или рупора удобно использовать при больших мощностях излучения. Они обладают также хорошими диапазонными свойствами. Однако открытый конец прямоугольного волновода обладает разными диаграммами направленности в плоскостях E и Н. От этого недостатка свободны рупорные облучатели, где имеется возможность почти независимой регулировки диаграмм направленности в плоскостях Е и Н путем подбора размеров раскрыва рупора  и
и  , который представлен на рисунке 2.5 [3].
, который представлен на рисунке 2.5 [3].
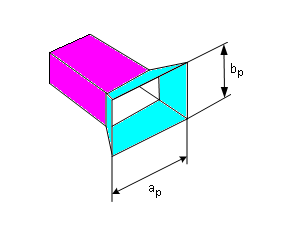
Рисунок 2.5 тАУ Рупорный облучатель
Диаграмму направленности небольшого рупора можно рассчитать при помощи следующих приближенных соотношений:
 (2.1)
(2.1)
где  , тАУ нормированные диаграммы направленности по напряженности поля в плоскостях Е и Н соответственно;
, тАУ нормированные диаграммы направленности по напряженности поля в плоскостях Е и Н соответственно;
 тАУ угол, отсчитываемый от направления максимума диаграммы направленности;
тАУ угол, отсчитываемый от направления максимума диаграммы направленности;
тАУ размер раскрыва рупора в плоскости Н;
тАУ размер раскрыва рупора в плоскости E;
Путем расчета определяются размеры раскрыва рупора и  , при которых на краю раскрыва линзы поле ослабевает примерно на 10 дБ по сравнению с полем в ее центре. Иными словами, напряженность поля на краю раскрыва составляет примерно 0.316 от напряженности поля в центре раскрыва. Таким образом, для большинства облучателей антенна получается оптимальной, когда уровень облучения края линзы на 10 дБ ниже уровня облучения ее центра и диаграмма направленности облучателя должна удовлетворять соотношениию:
, при которых на краю раскрыва линзы поле ослабевает примерно на 10 дБ по сравнению с полем в ее центре. Иными словами, напряженность поля на краю раскрыва составляет примерно 0.316 от напряженности поля в центре раскрыва. Таким образом, для большинства облучателей антенна получается оптимальной, когда уровень облучения края линзы на 10 дБ ниже уровня облучения ее центра и диаграмма направленности облучателя должна удовлетворять соотношениию:
 (2.2)
(2.2)
где  - угол раскрыва.
- угол раскрыва.
После выбора облучателя следует найти соотношение между радиусом линзы и фокусным расстоянием
и фокусным расстоянием  при помощи следующего выражения
при помощи следующего выражения
Для того чтобы определить угол раскрыва  необходимо вначале задаться соотношением
необходимо вначале задаться соотношением  в пределах
в пределах  . Выберем его равным 0.7 и определим угол раскрыва
. Выберем его равным 0.7 и определим угол раскрыва
 ,
,
Далее, пользуясь приближенными соотношениями (2.1) , найдем размеры и , удовлетворяющие соотношению (2.2).

Таким образом,  ,
, 
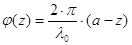
Нормированные диаграммы направленности рупорного облучателя в плоскостях E и H представлены на рисунках 2.6 и 2.7, которые рассчитаны и построены при помощи приближенных соотношений 2.1.3
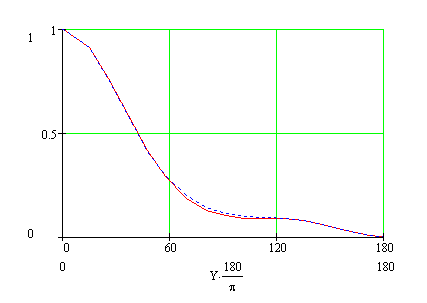
Рисунок 2.6 тАУ Диаграммы направленности облучателя в плоскостях E и H
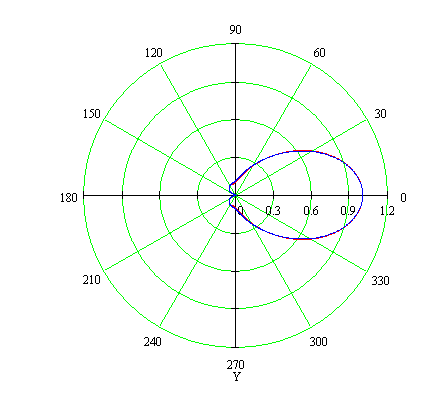
Рисунок 2.7 - Диаграммы направленности облучателя в полярной
системе координат
2.5 Расчет диаграммы направленности и коэффициента усиления
2.5.1 Диаграмма направленности в горизонтальной плоскости
Диаграмма направленности антенны тАУ это зависимость интенсивности электромагнитного поля, излучаемого антенной, или его отдельных компонент от угловых координат в пространстве.
Распределение амплитуд поля для цилиндрической линзы Люнеберга в плоскости пластин можно найти по следующей формуле:
 , (2.3)
, (2.3)
где  - ДН облучателя;
- ДН облучателя;
Зная амплитудное распределение поля для линзы, можно найти выражение диаграммы направленности
На рисунках 2.8 и 2.9 представлена нормированная диаграмма направленности антенны в горизонтальной плоскости в декартовой и полярной системах координат
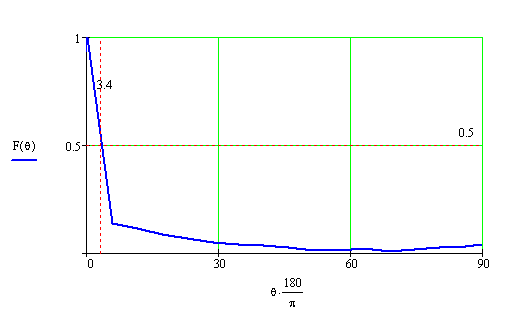
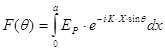
Рисунок 2.8 - Нормированная диаграмма направленности антенны в горизонтальной плоскости в декартовой системе координат
Рисунок 2.9 - Нормированная диаграмма направленности антенны в горизонтальной плоскости в полярной системе координат
2.5.2 Диаграмма направленности в вертикальной плоскости
Для расчета ДН в плоскости, перпендикулярной пластинам, можно воспользоваться формулой:
 ,
,
где  - амплитудное распределение вдоль оси z от центра линзы (
- амплитудное распределение вдоль оси z от центра линзы (  ) до центра раскрыва (
) до центра раскрыва ( ,
,  ). Оно оказывается таким же, как и на половине раскрыва вдоль оси x, и определяется выражением (2.3), где следует положить
). Оно оказывается таким же, как и на половине раскрыва вдоль оси x, и определяется выражением (2.3), где следует положить  . Распределение фазы описывается выражением:
. Распределение фазы описывается выражением:
На рисунках 2.10 и 2.11 представлена нормированная диаграмма направленности антенны в вертикальной плоскости в декартовой и полярной системах координат
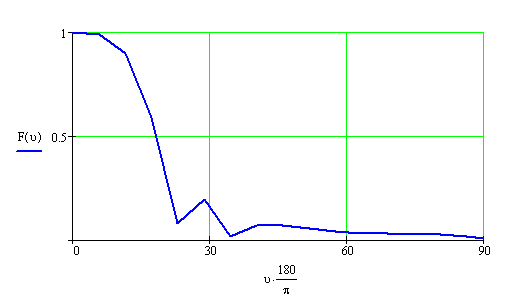
Рисунок 2.10 - Нормированная диаграмма направленности антенны в вертикальной плоскости в декартовой системе координат
Рисунок 2.11 - Нормированная диаграмма направленности антенны в вертикальной плоскости в полярной системе координат
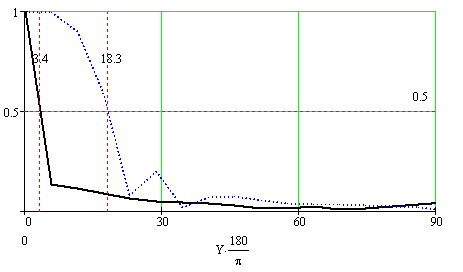
Рисунок 2.12 - Нормированные диаграммы направленности антенны в горизонтальной и вертикальной плоскости в декартовой системе координат
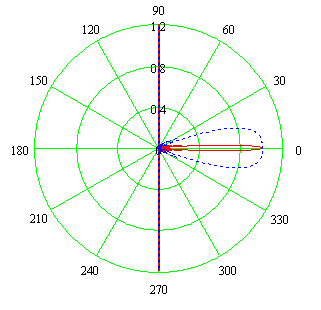
Рисунок 2.13 - Нормированные диаграммы направленности антенны в горизонтальной и вертикальной плоскости в полярной системе координат
2.5.3 Коэффициент направленного действия (КНД)
КНД характеризует способность антенны концентрировать излученное электромагнитное поле в каком-либо определенном направлении. Это понятие было введено в 1929 году А.А.Пистолькорсом. КНД тАУ это число, показывающее, во сколько раз пришлось бы увеличить мощность излучения антенны при переходе от направленной к не направленной при условии сохранения одинаковой напряженности поля в месте приема (при прочих равных условиях):
 ,
,
где  - мощность излучения ненаправленной антенны;
- мощность излучения ненаправленной антенны;
 - мощность излучения направленной антенны;
- мощность излучения направленной антенны;
За ненаправленную антенну принимают антенну, излучающую равномерно во все стороны (так называемый изотропный излучатель).
Окружим антенну сферой достаточно большого радиуса так, чтобы напряженность поля на поверхности этой сферы можно было рассчитывать как для дальней зоны. Поток мощности через элемент  поверхности сферы:
поверхности сферы:
 ,
,
где  - модуль значения напряженности поляна элементе ;
- модуль значения напряженности поляна элементе ;
 - плотность потока мощности в свободном пространстве.
- плотность потока мощности в свободном пространстве.
Мощность излучения для любой антенны может быть определена как поток мощности через всю поверхность S сферы, окружающей антенну, то есть как

Для ненаправленной антенны  независимо от направления и мощность излучения
независимо от направления и мощность излучения
 ,
,
где  - площадь сферы радиусом
- площадь сферы радиусом  .
.
Напряженность поля, создаваемого направленной антенной,
 ,
,
где  - напряженность поля в направлении максимума излучения антенны;
- напряженность поля в направлении максимума излучения антенны;
 - нормированная диаграмма направленности.
- нормированная диаграмма направленности.
Учитывая, что площадь элемента сферической поверхности  , получаем выражение мощности излучения для направленной антенны
, получаем выражение мощности излучения для направленной антенны

Таким образом,  [2]
[2]
Из данного выше определения КНД следует, что напряженность поля ненаправленной антенны равняется напряженности поля в направлении максимума направленной антенны, то есть что  . Следовательно,
. Следовательно,
 ;
;
Определим КНД для каждой плоскости, а потом возьмем среднее геометрическое:
 - в горизонтальной плоскости;
- в горизонтальной плоскости;
 - в вертикальной плоскости;
- в вертикальной плоскости;
 .
.
Коэффициент направленного действия не учитывает потерь подводимой энергии в проводниках антенны, в изоляторах, в окружающих антенну предметах и в земле. В связи с этим вводится параметр, учитывающий эти потери, называемый коэффициентом усиления (КУ) антенны.
КНД и КУ связаны через КПД следующим соотношением:

КПД линзы, учитывающий потери в диэлектрике, определится по формуле:
 ,
,
где  - коэффициент затухания;
- коэффициент затухания;
 - ширина линзы;
- ширина линзы;
 - тангенс угла диэлектрических потерь.
- тангенс угла диэлектрических потерь.

Таким образом, КПД и КУ линзы равны


2.6 Расчет питающего волновода
В технике СВЧ в качестве канализирующих устройств широкое применение находят различные типы волноводов. Наиболее распространенными среди них являются волноводы прямоугольного и круглого сечений. Однако волноводы могут быть использованы не только для канализации электромагнитной энергии, но и для ее излучения.
Основным типом волны в прямоугольном волноводе является волна  , структура которой представлена на рисунке 2.14
, структура которой представлена на рисунке 2.14
Рисунок 2.14 тАУ Структура поля в волноводе при волне типа
Для прямоугольного волновода с волной размеры сечения определяются неравенствами  ;
;  . Обычно берут
. Обычно берут  ;
;  [1]
[1]
 ;
; 
Прямоугольные волноводы с волной типа стандартизированы. Размеры стандартного волновода  мм
мм
Критическая длина волны в прямоугольном волноводе рассчитываются по формуле:
 м;
м;
 м
м
Зондовый переход, схема которого представлена на рисунке 2.15, по существу представляет собой несимметричную антенну (передающую или приемную в зависимости от направления распространения волны).
Рисунок 2.15 тАУ Зондовый переход от коаксиального кабеля
к прямоугольному волноводу
Расчет зонда ведется из условия его согласования с коаксиальной линией и волноводом. Для этого воспользуемся системой уравнений:
 (2.4)
(2.4)
где  ,
,  - размеры волновода;
- размеры волновода;
 ,
,  определяют положение зонда в волноводе;
определяют положение зонда в волноводе;
 - его длина;
- его длина;
 Ом - волновое сопротивление кабеля;
Ом - волновое сопротивление кабеля;
 - волновое сопротивление зонда;
- волновое сопротивление зонда;
 , где
, где  - радиус провода зонда.
- радиус провода зонда.
Обычно диаметр зонда берут  ; высоту зонда принимают
; высоту зонда принимают  , а
, а  . Определению в этом случае подлежит , величину которого можно найти из уравнений (2.4) [1].
. Определению в этом случае подлежит , величину которого можно найти из уравнений (2.4) [1].
 м;
м;
 Ом;
Ом;
 см;
см;
 см;
см;
 см.
см.
2.7 Расчет дальности связи с учетом атмосферы
В радиолокаторах приемная и передающая антенны обычно совмещены. В момент излучения приемник отключен от антенны. В промежутках между излучениями передатчик отключен от антенны, а приемник подсоединен к ней. Происходит прием отраженных сигналов. В этом случае
 (2.5)
(2.5)
Формула (2.5) называется уравнением радиолокации [8].
Уравнение радиолокации устанавливает связь мощности  , поступающей на вход приемника РЛС, с мощностью передатчика , отражающими свойствами объекта
, поступающей на вход приемника РЛС, с мощностью передатчика , отражающими свойствами объекта  и дальностью до него , свойствами реальной трассы распространения радиоволн
и дальностью до него , свойствами реальной трассы распространения радиоволн  , длиной волны
, длиной волны  и параметрами антенной системы
и параметрами антенной системы  .
.
Множитель, учитывающий влияние атмосферы и земной поверхности на распространение радиоволн, связан с множителем ослабления  следующим соотношением:
следующим соотношением:
 ,
,
где 
Принятая мощность с учетом влияния атмосферы
 Вт
Вт
Таким образом,
 км
км
2.8 Расчет ППФ и его АЧХ
Фильтры СВЧ применяют для частотной селекции сигналов, согласования комплексных нагрузок, в цепях задержки и в качестве замедляющих систем.
Фильтры являются обычно пассивными взаимными устройствами и характеризуются частотной зависимостью вносимого в тракт затухания. Полоса частот с малым затуханием называется полосой пропускания, а полоса частот с большим затуханием тАУ полосой заграждения. По взаимному расположению полосы пропускания и заграждения принято выделять следующие типы фильтров: фильтр нижних частот (ФНЧ), пропускающие сигналы ниже заданной граничной частоты и подавляющие сигналы с частотами выше граничной; фильтры верхних частот (ФВЧ), пропускающие сигналы на частотах выше заданной и подавляющие сигналы других частот; полосно-пропускающие (полосовые) фильтры (ППФ), пропускающие сигналы в пределах заданной полосы частот и подавляющие сигналы вне этой полосы, полосно-заграждающие (режекторные) фильтры (ПЗФ), подавляющие сигналы в пределах заданной полосы частот и пропускающие сигналы вне этой полосы.
Частотная характеристика каждого фильтра имеет переходную область между полосой пропускания и полосой заграждения, то есть между частотами и
и  . В этой области затухание меняется от максимального значения до минимального. Обычно стараются уменьшить эту область, что приводит к усложнению фильтра, увеличению числа его звеньев. При проектировании фильтров, как правило, задаются следующие характеристики: полоса пропускания, полоса заграждения, средняя частота, затухание в полосе пропускания, затухание в полосе заграждения, крутизна изменения затухания в переходной области, уровень согласования по входу и по выходу, характеристики линии передачи, в которую включается фильтр, тип линии передачи. Иногда оговариваются фазовые характеристики фильтра [6].
. В этой области затухание меняется от максимального значения до минимального. Обычно стараются уменьшить эту область, что приводит к усложнению фильтра, увеличению числа его звеньев. При проектировании фильтров, как правило, задаются следующие характеристики: полоса пропускания, полоса заграждения, средняя частота, затухание в полосе пропускания, затухание в полосе заграждения, крутизна изменения затухания в переходной области, уровень согласования по входу и по выходу, характеристики линии передачи, в которую включается фильтр, тип линии передачи. Иногда оговариваются фазовые характеристики фильтра [6].
В данной курсовой работе необходимо рассчитать ППФ, используя следующие данные:  МГц,
МГц,  дБ,
дБ,  МГц,
МГц,  дБ.
дБ.
2.8.1 Расчет низкочастотного фильтра прототипа
В настоящее время наиболее распространенной методикой расчета фильтров СВЧ является методика, согласно которой вначале рассчитывается низкочастотный фильтр-прототип. Нахождение параметров схемы фильтра-прототипа по заданной частотной характеристике фильтра является задачей параметрического синтеза. Для общности результатов все величины нормируются. Сопротивления нагрузки и генератора принимаются равными единице. Наряду с нормировкой по сопротивлению проводится нормировка по частоте, например граничная частота полосы пропускания фильтра принимается равной единице. Таким образом, расчет фильтра СВЧ сводится к синтезу схемы низкочастотного прототипа и замене элементов с сосредоточенными параметрами их эквивалентами с распределенными параметрами.
Для аппроксимации частотных характеристик применяется ряд функций, удовлетворяющих условиям физической реализуемости фильтров. Наиболее распространенными являются максимально плоская и равноволновая аппроксимации, использующие полиномы Баттерворта и Чебышева соответственно.
Рассчитаем фильтр с максимально плоской характеристикой затухания. Она монотонно возрастает при повышении частоты:
 ,
,
где  - число звеньев фильтра прототипа;
- число звеньев фильтра прототипа;
 - нормированная частота;
- нормированная частота;
 - коэффициент пульсаций;
- коэффициент пульсаций;
- граничная частота полосы пропускания;
 - затухание на частоте
- затухание на частоте
Максимально плоская характеристика затухания фильтра тАУ прототипа нижних частот представлена на рисунке 2.16
Рисунок 2.16 - Максимально плоская характеристика затухания фильтра тАУ прототипа нижних частот
Число звеньев фильтра прототипа может быть найдено из требований к АЧХ фильтра. Так, для фильтра с максимально плоской АЧХ число звеньев определяется следующим образом:
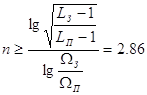 ,
,
Возьмем  , тогда схема фильтра-прототипа нижних частот будет выглядеть следующим образом
, тогда схема фильтра-прототипа нижних частот будет выглядеть следующим образом
Схема фильтра-прототипа нижних частот представлена на рисунке 2.17
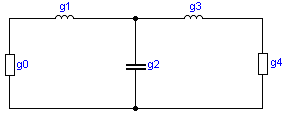
Рисунок 2.18 - Схема фильтра-прототипа нижних частот
Параметры фильтра с максимально плоской характеристикой можно рассчитать по следующей формуле:
 ,
,
где  - коэффициент пульсаций;
- коэффициент пульсаций;
Таким образом,
g0=1, g1=0.914, g2=1.829, g3=0.914, g4=1.
Денормировки параметров фильтра производится с помощью соотношений:
 ,
,  ,
, 
Здесь обозначения со штрихами относятся к нормированным параметрам фильтра-прототипа, без штрихов - к денормированным:  ,
,  ,
,  ,
,  ,
,  .
.
Так как будущий фильтр будем ставить в коаксиальный тракт передачи, то  Ом, тогда
Ом, тогда



2.8.2 Расчет ППФ
Для проектирования ППФ воспользуемся фильтром-прототипом нижних частот и реактансным преобразованием частоты:
где  - центральная частота ППФ;
- центральная частота ППФ;
 ;
;
 - полоса пропускания ППФ [6].
- полоса пропускания ППФ [6].
Любая индуктивность  в фильтре-прототипе с единичной граничной частотой
в фильтре-прототипе с единичной граничной частотой  после выполнения частотного преобразования трансформируются в последовательный контур с параметрами:
после выполнения частотного преобразования трансформируются в последовательный контур с параметрами:

Одновременно любая емкость  в фильтре-прототипе превращается в параллельный колебательный контур с параметрами:
в фильтре-прототипе превращается в параллельный колебательный контур с параметрами:


Эквивалентная схема ППФ представлена на рисунке 2.19
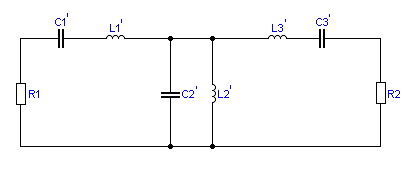
Рисунок 2.19 - Эквивалентная схема ППФ
Таким образом,





2.8.3 Реализация ППФ
По способу реализации ППФ можно разделить на следующие типы: на одиночной МПЛ с зазорами; на параллельных связанных полуволновых резонаторах; на встречных стержнях; с параллельными и последовательными четвертьволновыми шлейфами длиной  , где - длина волны в линии, соответствующая средней частоте полосы пропускания ППФ; с двойными шлейфами и четвертьволновыми соединительными линиями; на диэлектрических резонаторах.
, где - длина волны в линии, соответствующая средней частоте полосы пропускания ППФ; с двойными шлейфами и четвертьволновыми соединительными линиями; на диэлектрических резонаторах.
Выполним ППФ на микрополосковых линиях (МПЛ).
Отрезки микрополосковых линий выполняются в виде тонких слоев металла, нанесенных на листы диэлектрика (подложки). Наиболее распространены экранированные несимметричные МПЛ. МПЛ используются во всем диапазоне СВЧ. По сравнению с полыми волноводами МПЛ обладают рядом недостатков тАУ имеют более высокие погонные потери и сравнительно низкую передаваемую мощность. Кроме того, открытые МПЛ излучают энергию в пространство, из-за чего могут возникать нежелательные электромагнитные связи.
Но МПЛ обладают и важными достоинствами. Они имеют малые габариты и массу, дешевы в изготовлении, технологичны и удобны для массового производства методами интегральной технологии, что позволяет реализовать на пластине из металлизированного с одной стороны диэлектрика целые узлы и функциональные модули в микрополосковом исполнении [6].
Реализация последовательных колебательных контуров в МПЛ очень затруднена. Вместе с тем последовательное включение можно заменить параллельным с помощью преобразований:
 ,
, 




После замены схема ППФ представлена на рисунке 2.20
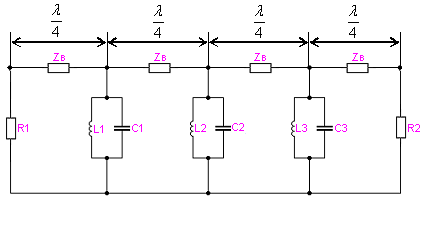
Рисунок 2.20 - Схема ППФ после замены последовательного включения параллельным
Для практических расчетов волнового сопротивления МПЛ часто используют выражение, полученное в квазистатическом приближении:
 (2.1)
(2.1)
Точность определения  по этой формуле составляет 1% при
по этой формуле составляет 1% при  и 3% при
и 3% при 
Длину волны на низких частотах рассчитаем при помощи формулы, полученной в квазистатическом приближении:

где - длина волны в свободном пространстве;
 - эффективная диэлектрическая проницаемость линии.
- эффективная диэлектрическая проницаемость линии.
Эффективная
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы