Методы исследования нелинейных систем
Предмет:
"Теория автоматического управления"
Тема:
"Методы исследования нелинейных систем"
1. Метод дифференциальных уравнений
Дифференциальное уравнение замкнутой нелинейной системы n-го порядка (рис. 1) можно преобразовать к системе n-дифференциальных уравнений первого порядка в виде:
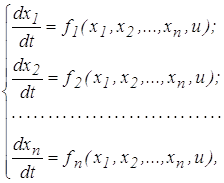

где:  тАУ переменные, характеризующие поведение системы (одна из них может быть регулируемая величина);
тАУ переменные, характеризующие поведение системы (одна из них может быть регулируемая величина);  тАУ нелинейные функции; u тАУ задающее воздействие.
тАУ нелинейные функции; u тАУ задающее воздействие.
Обычно, эти уравнения записываются в конечных разностях:
 ,
,
где  тАУ начальные условия.
тАУ начальные условия.
Если отклонения  не большие, то эту систему можно решать, как систему алгебраических уравнений. Решение можно представить графически.
не большие, то эту систему можно решать, как систему алгебраических уравнений. Решение можно представить графически.
2. Метод фазового пространства
Рассмотрим случай, когда внешнее воздействие равно нулю (U = 0).
Движение системы определяется изменением ее координат - в функции времени. Значения в любой момент времени характеризует состояние (фазу) системы и определяет координаты системы имеющей n тАУ осей и могут быть представлены как координаты некоторой (изображающей) точки М (рис. 2).
в функции времени. Значения в любой момент времени характеризует состояние (фазу) системы и определяет координаты системы имеющей n тАУ осей и могут быть представлены как координаты некоторой (изображающей) точки М (рис. 2).
Фазовым пространством называется пространство координат системы.
С изменением времени t точка М движется по траектории, называемой фазовой траекторией. Если менять начальные условия получим семейство фазовых траекторий, называемых фазовым портретом. Фазовый портрет определяет характер переходного процесса в нелинейной системе. Фазовый портрет имеет особые точки, к которым стремятся или от которых уходят фазовые траектории системы (их может быть несколько).
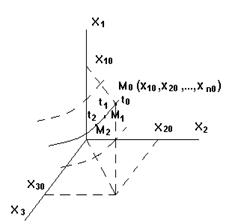
Рис. 2
Фазовый портрет может содержать замкнутые фазовые траектории, которые называются предельными циклами. Предельные циклы характеризуют автоколебания в системе. Фазовые траектории нигде не пересекаются, кроме особых точек, характеризующих равновесные состояния системы. Предельные циклы и состояния равновесия могут быть устойчивыми или не устойчивыми.
Фазовый портрет полностью характеризует нелинейную систему. Характерной особенностью нелинейных систем является наличие различных типов движений, нескольких состояний равновесия, наличие предельных циклов.
Метод фазового пространства является фундаментальным методом исследования нелинейных систем. Исследовать нелинейных систем на фазовой плоскости гораздо проще и удобнее, чем с помощью построения графиков переходных процессов во временной области.
Геометрические построения в пространстве менее наглядны, чем построения на плоскости, когда система имеет второй порядок, при этом применяется метод фазовой плоскости.
Применение метода фазовой плоскости для линейных систем
Проанализируем связь между характером переходного процесса и кривыми фазовых траекторий. Фазовые траектории могут быть получены либо путем интегрирования уравнения фазовой траектории, либо путем решения исходного дифференциального уравнения 2-го порядка.
Пусть задана система (рис. 3).
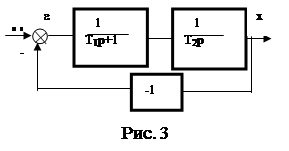
Рассмотрим свободное движение системы. При этом: U(t)=0, e(t)=тАУ x(t)
В общем виде дифференциальное уравнение имеет вид
 где
где  (1)
(1)
Это однородное дифференциальное уравнение 2-го порядка его характеристическое уравнение равно
 . (2)
. (2)
Корни характеристического уравнения определяются из соотношений
 (3)
(3)
Представим дифференциальное уравнение 2-го порядка в виде системы
уравнений 1-го порядка:
 (4)
(4)
где  скорость изменения регулируемой величины.
скорость изменения регулируемой величины.
В рассматриваемой линейной системе переменные x и y представляют собой фазовые координаты. Фазовый портрет строим в пространстве координат x и y, т.е. на фазовой плоскости.
Если исключим время из уравнения (1), то получим уравнение интегральных кривых или фазовых траекторий.
 . (5)
. (5)
Это уравнение с разделяющимися переменными
 . (6)
. (6)
Рассмотрим несколько случаев
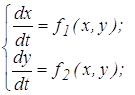
1. Пусть корни характеристического уравнения (3) имеют вид
 (т.е.
(т.е.  ). (7)
). (7)
При этом переходной процесс описывается уравнениями
x = A sin (wt+j), (8)
y = Aw cos (wt+j),
т.е. представляет собой незатухающие колебания с постоянной амплитудой А и начальной фазой тАУ j.
На фазовой плоскости (рис. 4) эти уравнения представляют собой параметрические уравнения эллипса с полуосями А и wA (где A тАУ постоянная интегрирования).
Если обозначить

Уравнение эллипса можно получить решением уравнения фазовых траекторий
 (9)
(9)
Состояние равновесия определяется из условия
 ,
,
при этом x0 = y0 = 0.
Особая точка называется "центр" и соответствует устойчивому равновесию, так как фазовые траектории от нее не удаляются.
2. Пусть корни характеристического уравнения (3) имеют вид
 (10)
(10)
При этом переходной процесс описывается уравнениями:

Из уравнения фазовых траекторий  получим уравнение
получим уравнение

Это уравнение семейства гипербол при изменении A (рис 5).
Рис. 5
Особая точка называется "седло". Уравнения асимптот (сепаратрис) при А = 0 имеют вид: 
3. Пусть корни характеристического уравнения (3) имеют вид
 (11)
(11)
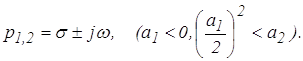
Фазовая траектория имеет вид сворачивающейся спирали (рис. 6), а точка равновесия называется "устойчивый фокус".
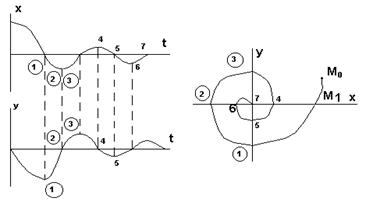
Рис. 6
4. Пусть корни характеристического уравнения (3) имеют вид
 (12)
(12)
Переходный процесс представляет собой расходящиеся колебания, фазовая траектория тАУ разворачивающаяся спираль. Особая точка называется "неустойчивый фокус" (рис. 7).
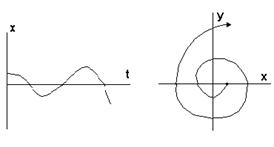
Рис. 7
5. Пусть корни характеристического уравнения (3) имеют вид
 (13)
(13)
Переходный процесс имеет апериодический характер. Особая точка называется "устойчивый узел" (рис. 8).
Рис. 8
6. Пусть корни характеристического уравнения (3) имеют вид
 (14)
(14)
Особая точка называется "неустойчивый узел" (рис. 9).
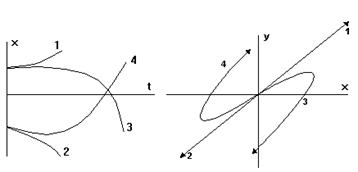
Рис. 9
4. Методы построения фазовых портретов
Для построения фазовых портретов можно использовать различные методы: метод дифференциальных уравнений, метод изоклин, и др.
Метод дифференциальных уравнений. Сущность метода заключается в том, что по дифференциальным уравнениям отдельных участков нелинейного элемента строят соответствующие фазовые портреты на плоскости.
Метод изоклин тАУ это метод линий постоянного наклона.
Пусть даны уравнения нелинейной системы:
 (15)
(15)
где:  тАУ произвольные функции.
тАУ произвольные функции.
Чтобы получить фазовый портрет исключим время:
 . (16)
. (16)
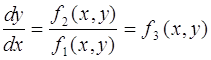
Пусть  , при этом
, при этом  тАУ это уравнение линии в плоскости (x 0 y). Каждому значению константы с соответствует некоторая линия, обладающая следующим свойством: в каждой точке линии
тАУ это уравнение линии в плоскости (x 0 y). Каждому значению константы с соответствует некоторая линия, обладающая следующим свойством: в каждой точке линии  , т.е. если фазовая траектория пересекает изоклину, то она имеет постоянный наклон рис. 10.
, т.е. если фазовая траектория пересекает изоклину, то она имеет постоянный наклон рис. 10.
y
Рис. 10
Если провести достаточное число таких линий с соответствующими наклонами, то можно построить фазовый портрет системы. При этом точность зависит от числа изоклин. Направление движения определяется по правилу: если производная  , x >0, то движение такое, что x возрастает.
, x >0, то движение такое, что x возрастает.
5. Построение фазового портрета нелинейной системы
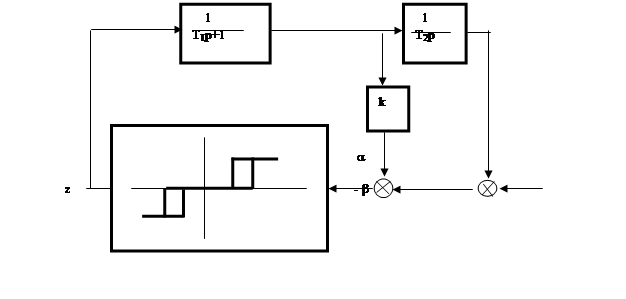
Рассмотрим релейную следящую систему, схема которой приведена на рис. 11.

















 +
+






















 x1 НЭ У Uпит Д ТГ P U0
x1 НЭ У Uпит Д ТГ P U0



 -
-


 x
x

Рис. 11
Если a ¹ b на вход НЭ с релейной характеристикой (рис. 12) подается сигнал  При этом: b тАУ угол поворота задающей оси; a тАУ угол поворота отрабатывающего потенциометра.
При этом: b тАУ угол поворота задающей оси; a тАУ угол поворота отрабатывающего потенциометра.
 z
z
тАУ a2 тАУ a1
0 a1 a2 x1
Рис. 12
Вследствие этого на двигатель подается напряжение В± , двигатель вращается в определенном направлении в соответствии с полярностью подаваемого напряжения до тех пор, пока оно не станет равным нулю.
, двигатель вращается в определенном направлении в соответствии с полярностью подаваемого напряжения до тех пор, пока оно не станет равным нулю.
Для улучшения качества переходного процесса в систему может быть включена отрицательная обратная связь по скорости двигателя с помощью тахогенератора (ТГ).
Запишем уравнения элементов системы. Для двигателя постоянного тока с независимым возбуждением
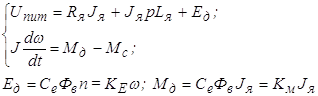 (17)
(17)
Так как поток возбуждения  = const, то
= const, то  . Допустим, момент нагрузки мал, при этом
. Допустим, момент нагрузки мал, при этом  =0.
=0.
Передаточную функцию для якорной цепи K1(p) можно получить из ее дифференциального уравнения
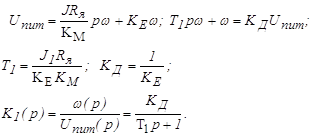 (18)
(18)
Пусть 
Для редуктора и угла поворота вала двигателя
 (19)
(19)
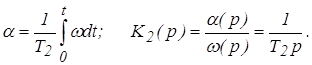
Для тахогенератора
 . (20)
. (20)
На основании функциональной схемы и полученных передаточных функций элементов системы составляем структурную схему рис. 13
Для построения фазового портрета необходимо записать систему дифференциальных уравнений.
Рассмотрим свободное движение системы (b = 0) при этом x = a.
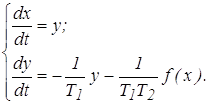
Дифференциальное уравнение нелинейной системы имеет вид
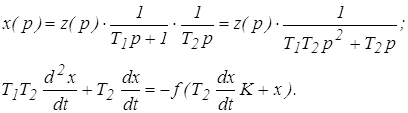 (21)
(21)
Представим уравнение в виде системы уравнений:
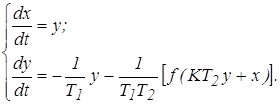 (22)
(22)
Построим фазовый портрет. Для простоты построения фазового портрета делаем некоторые упрощения:
1) Пусть обратная связь по скорости тАУ  отсутствует (К = 0).
отсутствует (К = 0).
2) Характеристика нелинейного элемента однозначна (рис. 14).
При этом:
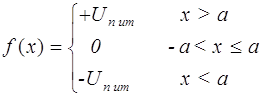 (23)
(23)
С учетом принятых допущений система уравнений упрощается.
 (24)
(24)
Построим характеристику для каждой зоны.
Пусть тАУ a £ x £ a, Вж(x) = 0.
При этом исходная система имеет вид:
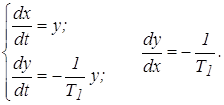 (25)
(25)
Решение этого уравнения имеет вид 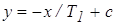 , т.е. наклон фазовых траекторий всюду постоянный (отрицательный).
, т.е. наклон фазовых траекторий всюду постоянный (отрицательный).
Определим равновесное состояние системы из условия:
 (26)
(26)
Это условие выполняется при y = 0, т.е. точка вырождается в прямую линию y = 0 на интервале [тАУ а, а]. Фазовые траектории на участке тАУ а< x < a представляют собой прямые с коэффициентом наклона -1/Т1 при различных значениях начальных условий.
На прямых линиях проставляем стрелки таким образом, чтобы конечное движение стремилось к началу координат.
Пусть х > a,  . При этом исходная система нелинейных уравнений имеет вид
. При этом исходная система нелинейных уравнений имеет вид
 (27)
(27)
где ci - семейство изоклин, которое представляет собой прямые параллельные оси х, т.е.  , где
, где  определяется из выражения для
определяется из выражения для 
 . (28)
. (28)
Таким образом
 . (29)
. (29)
Задаваясь значениями , строим семейство изоклин. Определяем углы пересечения изоклин фазовыми траекториями.
Так как  . Например, если
. Например, если  , то a = 90В°.
, то a = 90В°.
Пусть х < тАУ a,  . Построение выполняем аналогично, так как знак изменился, то будут другие углы пересечений изоклин фазовой траекторией. Фазовый портрет системы приведен на рис. 15.
. Построение выполняем аналогично, так как знак изменился, то будут другие углы пересечений изоклин фазовой траекторией. Фазовый портрет системы приведен на рис. 15.
Рис. 14 Рис. 15
Снимем упрощение К = 0, т.е. рассмотрим влияние отрицательной обратной связи по скорости двигателя на характер фазовой траектории.
При этом уравнения имеют вид:
(30)
Пусть  , при этом переключение будет происходить при условии
, при этом переключение будет происходить при условии  (а не условии х = а), это уравнение линии (рис. 16)
(а не условии х = а), это уравнение линии (рис. 16)
 . (31)
. (31)
При этом количество перерегулирований уменьшается; можно подобрать такой наклон, при котором нет переколебаний.
Рассмотрим фазовый портрет без ограничений. В системе без ограничений фазовый портрет можно представить на трехлистной поверхности с наклонными гранями (рис. 17.) При этом лист 2 соответствует зоне нечувствительности z=0, лист 1 соответствует отрицательным значениям z, а лист 3 положительным. Вследствие гистерезиса имеет место частичное наложение листов.
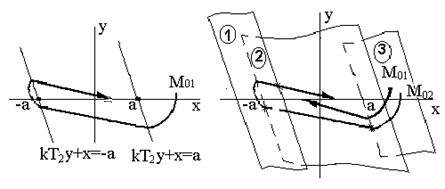
Рис. 16 Рис. 17
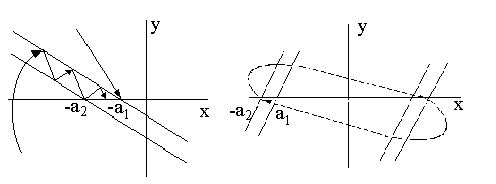
Исследуем систему. Исследуем влияние отрицательной обратной связи по скорости двигателя (т.е. влияние величины тАУ К). Пусть значение К увеличивается, при этом наклон прямых уменьшается, и может получиться, что срез будет более пологим чем наклон характеристики в средней части. Это приводит к частым переключениям. Такой режим называется скользящим. Если зона  очень узкая, то движение как бы соскальзывает к установившемуся режиму (рис. 18а).
очень узкая, то движение как бы соскальзывает к установившемуся режиму (рис. 18а).
Если изменить знак обратной связи с отрицательной связи на положительную связь, то при этом изменится наклон линий переключения, и количество колебаний будет увеличиваться, система будет "раскачиваться". Система работает, как генератор и может появиться либо замкнутый цикл тАУ автоколебания, либо расходящийся переходный процесс (рис. 18б).
а) б)
Рис. 18
Достоинства метода: простота и наглядность для систем 2-го порядка; пригодность для любого типа нелинейных элементов.
Недостатки: метод громоздкий для систем выше 2-го порядка, поэтому при n >2 не применяется.
Рассмотрим несколько примеров построения фазовых портретов нелинейных систем управления
Пример 1. Пусть задана система, состоящая из линейной части и нелинейного элемента (усилитель с ограничением по модулю) (рис. 19). Это кусочно-линейная система, так как на отдельных участках она ведет себя как линейная (в области) тАУ а, +а[). Допустим в области (] тАУ а, +а[) коэффициент усиления большой и система неустойчива а фазовый портрет характеризуется особой точкой "неустойчивый фокус". За пределами области коэффициент усиления мал, допустим, что при этом система устойчива и характеризуется особой точкой тАУ "устойчивый фокус".
При больших отклонениях x > |a| общий коэффициент усиления системы мал, система устойчива, процесс затухает.
При малых отклонениях общий коэффициент усиления системы большой тАУ процесс расходится к замкнутой траектории, которая характеризует наличие устойчивых автоколебаний (рис. 20).
В этой системе три типа движений: автоколебания; сходящиеся колебания; расходящиеся колебания

Пример 2. Пусть задана система с характеристикой нелинейного звена типа "зона нечувствительности" (рис. 21). Необходимо построить фазовый
портрет данной системы, определить наличие предельных циклов и проанализировать их устойчивость.

Рис. 21 Рис. 22
Пусть в области [-b, +b] система устойчива, при этом коэффициент усиления тАУ К мал, переходный процесс затухает, особая точка "устойчивый фокус" вне области К тАУ большой, переходный процесс расходится (рис. 22). Эта система имеет неустойчивый предельный цикл, т.е. автоколебания неустойчивы.
Для более сложных нелинейных элементов может быть несколько предельных циклов.
Пример Для заданной системы (рис. 23) построить примерный фазовый портрет.
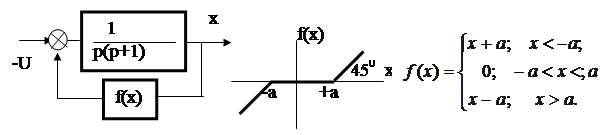
Рис. 23
Решение: Исходную схему можно представить в виде (рис. 24).
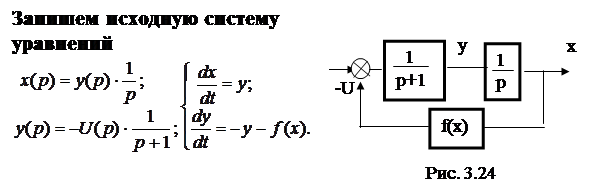
Построим фазовый портрет
1) При тАУ a < x < +a f(x) = 0, а система уравнений имеет вид
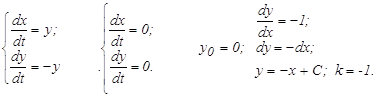
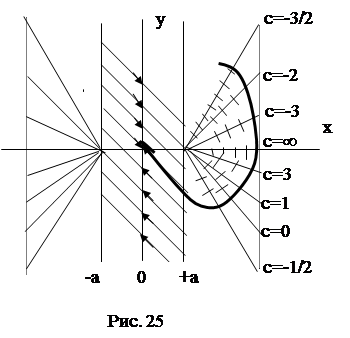
Фазовый портрет в этой области представляет семейство прямых с коэффициентом к = -1, а состояние равновесия устойчиво по Ляпунову и представляет отрезок оси y = 0 на интервале тАУ a 2) При x > +a f(x) = x тАУ a, а система уравнений имеет вид

Для каждого сi определимугловой коэффициент наклона изоклины тАУ к по формуле 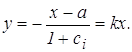 и угол пересечения фазовой траекторией изоклины по формуле a = arctg c, результаты приведены в таблицах 1 и 2.
и угол пересечения фазовой траекторией изоклины по формуле a = arctg c, результаты приведены в таблицах 1 и 2.
Таблица 1
Сi | 0 | 1 | 2 | 3 | -1/2 | -2 | -3 | ¥ |
| k | -1 | -1/2 | -1/3 | -1/4 | -2 | 1 | 1/2 | 0 |
Таблица 2
Ci | 0 | В±1 | В±1 | В±1 | В±1 | В±¥ |
| a | 0 | В±450 | В±630 | В±710 | В±800 | В±900 |
3) При x < тАУ a f(x) = x + a, а система уравнений имеет вид

Левая часть фазового портрета строится аналогично правой.
Пример 4. Для заданной системы (рис. 26) построить примерный фазовый портрет.