Налагодження пристроiв релейного захисту та автоматики
Нацiональний унiверситет "Львiвська полiтехнiка"
РЖнститут енергетики та систем керування
Конспект лекцiй з дисциплiни
"НАЛАГОДЖЕННЯ ПРИСТРОРЗВ РЕЛЕЙНОГО ЗАХИСТУ ТА АВТОМАТИКИ"
Пiдготував доцент кафедри
"Електричнi системи та мережi"
Кiдиба В.П.
Львiв тАУ 2010
ЦИФРОВРЖ ПРИСТРОРЗ ЗАХИСТУ ТА АВТОМАТИКИ
1. Загальна характеристика цифрових пристроiв захисту та автоматики
Останнiми роками в енергосистемах Украiни широко впрваджуються пристроi релейного захисту, виконанi на цифрових принципах. За кордоном такi пристроi впроваджуються в експлуатацiю вже на протязi бiльше двох десяткiв рокiв. Тому не дивно, що закордоннi фiрми, якi займаються розробкою цифрових пристроiв релейного захисту та автоматики, мають суттiву перевагу у порiвняннi з вiтчизняними виробниками подiбноi технiки.
Найбiльш вiдомими зарубiжними фiрмами в областi розробок цифрових пристроiв релейного захисту та автоматики i ABB, SIEMENS, ALSTOM, GENERAL ELECTRIC.
В лiтературi досить часто цифровi пристроi ще називать мiкропроцесорними. На наш погляд це не зовсiм вiрно. Мiкропроцесор тАУ це i один з основних елементiв багатьох пристроiв релейного захисту та автоматики. Але i пристроi, якi виконанi на основi мiкроконтролерiв. РД бiльш складнi пристроi релейного захисту, автоматики, обтАШiднанi в спiльну iнформацiйну мережу, для органiзацii якоi використовують комптАЩютери з потужними процесорами. Спiльним для всiх цих технiчних елементiв i використання цифрових принципiв iхнього функцiювання. Тому доцiльно всi цi пристроi називати цифровими пристроями релейного захисту.
У порiвняннi з традицiйними електромеханiчними та напiвпровiдникковими пристроями релейного захисту цифровi пристроi мають ряд суттiвих переваг, що робить iх застосування в енергосистемах на даний час практично безальтернативним. Основними з них i:
Ÿ бiльш висока точнiсть вiдтворення заданих характеристик функцiонування пристрою. В цiлому, апаратна похибка цифрових захистiв може досягати до 2%. Так, один з основних параметрiв вимiрювальних органiв захисту тАУ коефiцiiнт повернення тАУ може мати значення 0,99. Досягненя такого значення коефiцiiнта на напiвпровiдникових та електромеханiчних реле потребуi складних технiчних рiшень. Прикладом такого реле i захист вiд симетричного перевантаження статора генератора, виконаного на спецiальному реле РТВК. Це реле виконано на напiвпровiдникових елементах i дозволяi збiльшити коефiцiiнт порвернення до 0,99. Про те воно i дорогим та громiздким. Висока точнiсть вiдтворення характеристик захистiв дозволяi змiнити деякi параметри узгодження мiж захистами сумiжних елементiв електричноi мережi. Наприклад, можна зменшити ступiнь селективностi для максимальних струмових захистiв сумiжних елементiв мережi, що в свою чергу зменшить час iх спрацювання i, як наслiдок, час лiквiдацii аварii;
В· отримання характеристик будь-якоi складностi. Це особливо i актуальним для дистанцiйних захистiв, вимiрнi органи яких можуть мати якi завгодно характеристики i враховувати будь-якi особливостi режимiв, що можуть виникати в енергосистемi. При цьому змiна форми характеристик не потребуi нiяких додаткових технiчних переробок тАУ вона змiнюiться на алгоритмiчному рiвнi;
В· запамтАШятовування координат режиму пiд час спрацювання цифрового пристрою. Практично всi цифровi захисти запамтАШятовують координати режиму аварiйного та доаварiйного режиму, що даi змогу експлуатацiйному персоналу здiйснювати глибокий аналiз аварiйних ситуацiй, визначати причини аварii i на основi цього при необхiдностi уточнювати та змiнювати характеристики захистiв та автоматики;
В· можливiсть змiнювати конфiгурацiю пристрою. В поцесi розвитку мережi може виникнути необхiднiсть в змiнi характеристик пристроiв захисту тАУ змiнити уставки, ввести або вивести з роботи деякi функцii тощо. Такi змiни не потребують нiяких технiчних витрат, тому що вони здiйснюються на програмному рiвнi;
В· унiверсальнiсть. Ця особливiсть цифрових пристроiв в бiльшiй мiрi стосуiться розробникiв, а не експлуатацiю. Використовуючи унiверсальний процесорний модуль, вiдкоректувавши вхiднi та вихiднi кола, змiнюючи алгоритм функцiювання, можна створювати рiзнi типи захистiв та автоматики;
В· значно меншi габарити та меншi затрати електротехнiчних матерiалiв. Один невеликий за розмiром цифровий пристрiй може замiнити цiлу групу складних реле, виконаних на напiвпрвiдниках або електромеханiчних елементах. Наприклад, напiвпровiдниковий дистанцiйний захист типу ПДЕ вiд мiжфазних к.з. маi девтАШять вимiрних дистанцiйних органiв, кожен з яких виконаний у виглядi окремого модуля. В цифровому ж пристроi характеристики всiх цих вимiрних органiв задаються на програмному рiвнi i реалiзуються вiртуально в процесорi;
В· можливiсть самодiагностики. Алгоритми функцiонування сучасних цифрових пристроiв захисту, особливо складних, обовтАШязково включають функцiю самодiагностики, яка перiодично здiйснюi контроль справностi всiх складових пристрою тАУ вхiдних кiл, вихiдних кiл, цифрових елементiв i при виявленнi несправностей робота пристрою блокуiться з автоматичним повiдомленням про це черговому персоналу. Традицiйнi ж пристроi релейного захисту, особливо електромеханiчнi, такоi можливостi не мають i i багато випадкiв в експлуатацii, коли при виникненнi аварii цi пристроi не спрацьовували i пiсля аналiзу виявлялось, що вони були несправними, про що оперативний персонал i не здогадувався;
В· менше споживання енергii для функцiювання, що суттiво зменшуi потужнiсть джерел енергii оперативного струму;
В· менше навантаження та первиннi вимiрювальнi трансформатори струму та напруги. Потужнiсть споживання сучасних цифрових пристроiв релейного захисту складаi до 0,5 ВА. Це даi змогу пiдтАШiднувати до первинних вимiрювальних трансформаторiв струму та напруги бiльшу кiлькiсть пристроiв релейного захисту та автоматики, забезпечуючи при цьому роботу трансформаторiв струму та напруги в заданому класi точностi;
В· простота в експлуатацii. Пiд час проведення планових профiлактичних робiт немаi необхiдностi перевiряти характеристики окремих складових елементiв, як в традицiйних пристроях релейного захисту, тому що фiзично iх немаi, iхнi харакетристики реалiзованi програмно. Тому перевiряються лише загальнi характеристики функкцiювання. Це суттiво зменшуi номенклатуру робiт i вiдповiдно час перевiрки пристроiв.
2. Структурна схема цифрового пристрою РЗА
Незалежно вiд призначення цифрових пристроiв релейного захисту тАУ струмовi, дистанцiйнi тощо тАУ вони мають схожу структуру, яка наведена на рис. 2.1.

Рис.2.1. Структурна схема цифрового захисту
Основним елементом цифрового захисту i процесор, на якому реалiзований алгоритм роботи конкретного захисту. В залежностi вiд призначення пристрою та фiрми виробника може бути застосований один процесор або декiлька. Так, фiрма АВВ надаi перевагу багатопроцесорним системам, в яких кожен процесор виконуi конкретнi задачi алгоритму i цi процесори працюють паралельно. Це дозволяi забезпечити потрiбну швидкодiю та точнiсть. РЖншi фiрми застосовують однопроцесорнi системи, що вимагаi для забезпечення потрiбних характеристик застосування бiльш потужних процесорiв. Враховуючи важкi умови експлуатацii пристроiв релейного захисту (на багатьох пiдстанцiях цi пристроi працюють в неопалювальних примiщеннях), застосовують спецiальнi процесори так званого iндустрiального виконання, якi можуть працювати при температурi оточуючого середовища вiд мiнус 30 до плюс 50В°С, вiдноснiй вологостi до 80%.
Процесор маi звтАШязок з обтАШiктом захисту через кола вводу тАУ виводу. Вхiдною iнформацiiю i, як правило, аналоговi сигнали тАУ струми, напруги, температура тощо та бiнарнi тАУ положення комутацiйних апаратiв, стан вихiдних реле iнших пристроiв релейного захисту та автоматики тощо. Вихiдними сигналами цифрових захистiв, як i iнших захистiв i традицiйно бiнарнi сигнали. Цi сигнали поступають пiсля спрацювання цифрового захисту в кола управлiння та в кола сигналiзацii.
2.1 Перетворення аналогових сигналiв
Контрольованi напруги та струми i неперервними в часi аналоговими сигналами i можуть приймати на фiксованому вiдрiзку часу будь-якi значення в межах, обумовленими режимом роботи електричноi мережi. Цифровi пристроi захисту працюють не з аналоговими, а з дискретними (цифровими) сигналами, котрi можуть приймати на вiдмiну вiд аналогових сигналiв лише кiнцеву множину значень для конкретних моментiв часу. Процес перетворення аналогових сигналiв в дискретнi називаiться дискретизацii або квантуванням. Пристрiй, який здiйснюi це перетворення називаiться аналогоцифровим перетворювачем (АЦП).
Попередньо аналоговi сигнали, якi контролюються пристроями захисту тАУ це струм вiд трансформатора струму ТА та трансформатора напруги TV пiдводяться до спецiальних вхiдних перетворювачiв (на схемi це TAL та TVL). Цi перетворювачi призначенi для гальванiчноi розвтАШязки пристрою вiд зовнiшнiх кiл (трансформаторiв струму та трансформаторiв напруги), а також для отримання нормованоi напруги на виходi з подальшим ii перетворенням АЦП в цифровi сигнали.
На рис. 2.2 наведенi принциповi схеми вхiдних перетворювачiв струму та напруги, вiдповiдно рис. 2.2а) та рис. 2.2б).
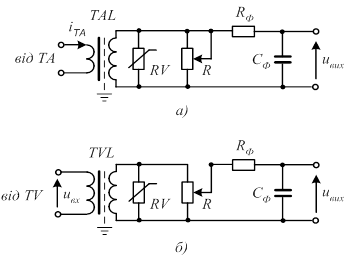
Рис. 2.2. Принциповi схеми вхiдних перетворювачiв струму а) та напруги б).
Сигнали вiд трансформаторiв струму TA та напруги TV подаються на первиннi обмотки промiжних трансформаторiв TAL та TVL. На вторинних обмотках цих трансформаторiв вiдповiдно струм та напруга перетворюються в напруги, пропорцiйнi вiдповiдно величинi струму та напруги. Для того, щоб iмпульснi сигнали, якi можуть виникати у вторинних колах трансформаторiв струму та напруги, не попадали в електронну частину цифрового пристрою та не пошкоджували його, мiж первиинною та вторинною обмотками промiжних трансформаторiв TAL та TVLвстановлюють екран. Для захисту електронних блокiв цифрового пристрою вiд перенапруг паралельно до вторинних обмоток промiжних трансформаторiв TAL та TVLвстановють варистори RV. В деяких схемах для захисту застосовують стабiлiтрони. Для узгодження вторинноi напруги на виходi промiжних трансформаторiв з вхiдними сигналами пристрою АЦП служать змiннi опори R. Для правильноi роботи АЦП необхiдно унеможливити попадання на нього високочастотного спектру сигналу. Тому застосовуiться високочастотний фiльтр, який виконаний на основi опору Rф та iмностi Сф. Слiд вiдмiтити, що пiд час реалiзацiii алгоритму функцiонування захисту додатково здiйснюiться цифрова фiльтрацiя сигналу. Вихiднi сигнали uвих з вхiдних перетворювачiв TAL та TVLпоступають на вхiд АЦП.
Перехiд вiд аналогового неперервного сигналу до дискретного супроводжуiться деякою втратою iнформацii. Це пояснюiться тим, що АЦП здiйснюi перетворення вхiдного аналогового сигналу в дискретний через деякi часовi промiжки  , а мiж ними значення вхiдного сигнал не контролюiться (рис. 4). Чим менший цей часовий промiжок, тим точнiше вiдтворюiться аналоговий сигнал в цифровiй формi. Основними характеристиками АЦП i його розряднiсть та iнтервал дискретизацii сигналу за часом. Дискретизацiя сигналу за часом ще називають частотою виборок, яка повтАЩязана з дискретизацiiю за часом Вавиразом:
, а мiж ними значення вхiдного сигнал не контролюiться (рис. 4). Чим менший цей часовий промiжок, тим точнiше вiдтворюiться аналоговий сигнал в цифровiй формi. Основними характеристиками АЦП i його розряднiсть та iнтервал дискретизацii сигналу за часом. Дискретизацiя сигналу за часом ще називають частотою виборок, яка повтАЩязана з дискретизацiiю за часом Вавиразом:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.1)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.1)
Для перiодичного сигналу з перiодом Т можна визначити за вiдомою частотою кiлькiсть виборок за перiод:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.2)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.2)
Для перiодичного сигналу iснуi взаiмозвтАЩязок мiж верхньою частотою сигналу, який кантуiться та кiлькiстю виборок за перiод. Вченими К. Шенноном та В. Котельниковим ще в 30-х роках було доведено, що для точного вiдтворення первинного перiодичного сигналу з його дискретного представлення необхiдно, щоб частота виборок  Ваповинна хоча б в два рази перевищувати максимальну частоту вхiдного перiодичного сигналу
Ваповинна хоча б в два рази перевищувати максимальну частоту вхiдного перiодичного сигналу  :
:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.3)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.3)
Це вiдповiдаi максимальному числу виборок за перiод
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.4)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2.4)
При заданому максимальному значеннi числа виборок  необхiдно з вхiдного аналогового сигналу виключити всi сигнал з частотою, вищою вiд . В протилежному випадку пiсля зворотнього перетворення сигналу в ньому зтАЩявиться сигнал пониженоi частоти, який спотворить реальний вхiдний сигнал. Тому на входi АЦП застосовують фiльтр вищих гармонiк з смугою пропускання не вище нiж частота . На схемi рис. 2.2 цей фiльтр реалiзований на основi RC елементiв
необхiдно з вхiдного аналогового сигналу виключити всi сигнал з частотою, вищою вiд . В протилежному випадку пiсля зворотнього перетворення сигналу в ньому зтАЩявиться сигнал пониженоi частоти, який спотворить реальний вхiдний сигнал. Тому на входi АЦП застосовують фiльтр вищих гармонiк з смугою пропускання не вище нiж частота . На схемi рис. 2.2 цей фiльтр реалiзований на основi RC елементiв  Вата
Вата  .
.
В сучасних цифрових пристроях РЗА застосовують АЦП з частотою виборок до 2000 Гц, що вiдповiдаi 40 виборкам за перiод промисловоi частоти 50 Гц. Пристроi з такою частотою виборок дозволяють контролювати вхiдний сигнал з частотою до 1000 Гц. Це вiдповiдаi 20 гармонiцi при основнiй частотi 50 Гц.
2.2 Вхiднi бiнарнi сигнали
Для роботи захисту, крiм аналогових сигналiв, необхiдно мати також iнформацiю про бiнарнi сигнали вiд iнших пристроiв релейного захисту та автоматики, положення комутацiйних апаратiв тощо. На практицi цi сигнали ще називають дискретними. Щоб не плутати цi сигнали з дискретними сигналами, якi отримуються пiсля квантування пристроiм АЦП аналогових сигналiв в подальшому будемо iх називати бiнарними. Наприклад, з метою реалiзацii функцii АПВ, ПРВВ; необхiдно мати iнформацiю про стан вимикача, на який дii даний захист, для прискорення дii даного захисту по командi вiд захисту шин необхiдно мати iнформацiю вiд вихiдних кiл захисту шин тощо. На рис. 2.1 бiнарний сигнал вiд зовнiшнього пристрою (умовно показаний у виглядi зовнiшнього реле KL) подаiться на вхiдний перетворювач бiнарних сигналiв TL1.
В сучасних цифрових пристроях бiнарнi сигнали вiд зовнiшнiх пристроiв подаються через оптрони. Оптрон представляi собою електронний ключ у виглядi транзистора VT (рис. 2.3), який керуiться свiтлодiодом VD. Пiд час протiкання струму через свiтлодiод (струм через свiтлодiод починаi протiкати пiсля замикання контакта KL), останнiй подаi сигнал на базу транзистраVT, який спрацьовуi i на його виходi зтАЩявляiться сигнал Uвих, який сигналiзуi про змiну стану бiнарного входу. Час спрацювання такого перетворювача мiзерний i складаi долi мiкросекунди.
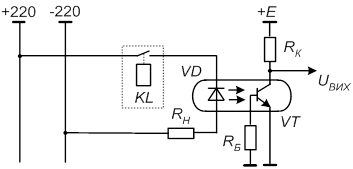
Рис. 2.3. Схема вводу дискретного сигналу
Для органiзацii протiкання струму через свiтлодiод VD пiсля спрацювання зовнiшнього контакта KL використовуiться зовнiшнi джерело оперативного струму, як правило напругою 220 В (зрiдка 110 В). Це i недолiком даноi схеми. Тому що навiть пiсля вимкнення вiд оперативного струму зовнiшнього пристрою, де встановлене реле KL, на контактах цього реле присутня напруга вiд оперативних кiл. Це i небезпечним для обслуговуючого персоналу. Тому для запобiгання ураження електричним струмом обслуговуючого персоналу пiд час проведення планових робiт для iнiцiалiзацii бiнарних входiв на iнших пристроях, якi мають звтАЩязок з даним пристроiм, застосовують джерело оперативного струму з пониженою напругою, наприклад джерело напругою 24 В (рис. 2.4), яке реалiзоване на iнверторному перетворювачi UVZ.

Рис. 2.4. Схема вводу дискретного сигналу на пониженiй напрузi
Але така схема маi два суттiвих недолiки. По перше, вона менш надiйна, нiж схема, наведена на рис. 2.3 за рахунок наявностi iнверторного перетворювача UVZ. Технiчно це досить складний ннапiвпровiдниковий елемент, який попередньо здiйснюi пертворення постiйного струму напругою 220 В в змiнну напругу пiдвищеноi частоти, наприклад, 400 Гц. Пiсля цього здiйснюiться перетворення цiii змiнноi напруги у постiйну напругу 24 В з вiдповiдною стабiлiзацiiю. Технiчна реалiзацiя такого складного перетворення понижуi надiйнiсть функцiювання перетворювача та схеми в цiлому. Як показав досвiд експлуатацii схем з такими перетворювачами, наприклад панелей серii ПДЕ, найбiльш ненадiйним елементом таких схем i блоки живлення, якi реалiзованi на основi саме iнверторних перетворювачiв.
Крiм того, застосування пониженоi напруги в колах, де комутуються контакти реле KL (рис. 2.4), може приводити до незамикання кола контактами реле KL. Це пояснюiться наступним чином. З часом в процесi експуатацii поверхнi цих контактiв окислюються i пiсля iх замикання стум в колi через iзолюючий окислений шар протiкати не буде тАУ схема працювати не буде. У випадку ж застосування напруги 220 В пiсля замикання окислених контактiв окислений шар буде пробиватись пiд дiiю цiii пiдвищеноi напруги i в колi буде протiкати струм, достатнiй для спрацювання схеми контролю бiнарних вхiдних сигналiв (рис. 2.3).
Пiд час реалiзацii схеми вводу бiнарного сигналу на основi оптрона, який споживаi незначний струм (до 5 мА) слiд памтАЩятати, що можливе хибне спрацювання такоi схеми за рахунок паразитних iмностей (рис. 2.5) , яка i мiж кабелями, якi здiйснюють звтАЩязок мiж окремими пристроями.

Рис. 2.5.Хибне спрацювання дискретного входу
Наприклад, реле KL2 зтАЩiднане з iншим пристроiм за допомогою довгого кабеля. Так само довгим кабелем зтАЩiднане реле KL, стан контактiв якого контролюiться оптроном VD(рис. 2.5). Цi кабелi прокладенi поряд в одному каналi. Тому мiж ними i електричний звтАЩязок за рахунок паразитноi iмностi СП (на рис. 5 для простоти показана результуюча iмнiсть мiж двома кабелями, насправдi ця iмнiсть i розподiлена вздовж спiльноi дiлянки мiж ними). Пiд час спрацювання ключа S в перехiдному процесi через паразитну iмнiсть СП в колi оптрона зтАЩявляiться сигнал, який може привести до його спрацювання. Це спрацювання буде хибним, тому що згiдно схеми оптрон VD повинен контролювати стан контакта реле KLа не положення ключа S. Про те, цей сигнал буде тiльки пiд час перехiдного процесу, повтАЩязаного з комутацiiю ключа S. Тому, якщо на виходi схеми поставити елемент затримки часу DTпорядка на 3 мс, можна вiдлагодити дану схему вiд хибноi роботи.
2.3 Перетворення та зберiгання iнформацii в цифровому пристроi РЗА
Цифровi сигнали вiд АЦП поступають в процесор, де вони обробляються за певним алгоритмом, реалiзованим у виглядi програми. Сама програма зберiгаiться в постiйному запамтАШятовуючому пристроi (ПЗП) (ROM тАУ Read Only Memory тАУ лише для читання). Це i перепрограмовуваний постiйний запамтАШятовуючий пристрiй з енергонезалежною памтАШятю, тобто iнформацiя в ньому зберiгаiться навiть тодi, коли пристрiй i вимкненим вiд зовнiшнього живлення.
Для зберiгання результатiв промiжних обчислень використовують оперативний запамтАШятовуючий пристрiй (ОЗП) ( RAM тАУ Random Access Memory тАУ памтАШять з тАЮвипадковимтАЭ доступом). ОЗП маi високу швидкодiю, але не зберiгаi iнформацii пiсля вимкнення зовнiшнього живлення.
Уставки спрацювання захистiв, якi потрiбно змiнювати в процесi експлуатацii, зберiгаються в постiйному перепрограмовуваному запамтАШятовуючому пристроi (ППЗП), який допускаi багатократну змiну уставок. При цьому iнформацiя про уставки зберiгаiться пiсля зникнення зовнiшнього живлення.
На переднiй панелi пристрою розмiщений пульт управлiння (клавiатура), при допомозi якого можна задавати необхiдний режим пристрою та змiнювати уставки спрацювання.
Результати роботи пристрою та уставки вiдображаються на рiдкокристалiчному iндикаторi, який також знаходиться на переднiй панелi пристрою.
Пiсля спрацювання пристрою замикаються вихiднi контакти реле KL1 таKL2.
3.Вибiр параметрiв спрацювання дистанцiйних захистiв фiрми SIEMENS
В сучасних цифрових захистах використовуються в основному характеристики, форма яких представлена на рис. 3.1. Методика розрахунку таких характеристик дещо вiдрiзняiться вiд методики розрахунку уставок для традицiйних дистанцiйних захистiв, виконаних не на цифровому принципi. Для прикладу розглянемо методику розрахунку параметрiв спрацювання дистанцiйного захисту 7SA502 фiрми SIEMENS.
На рис. 3.1 наведенi характеристики вимiрних органiв дистанцiйного захисту 7SA502. На цьому рисунку наведенi форми характеристик першоi, другоi, третьоi ступеней, пусковоi зони та зони хитань. Призначення зони хитань розглянемо нижче.
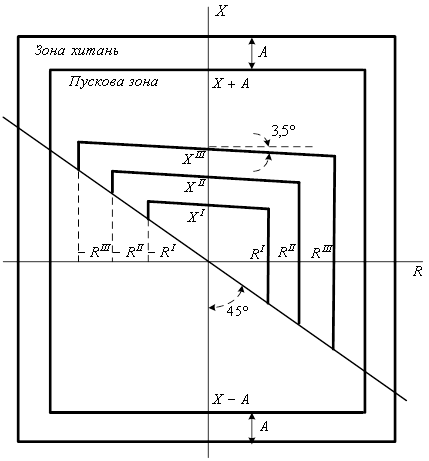
Рис. 3.1. Характеристики вимiрних органiв дистанцiйного захистуфiрми SIEMENS
Розрахунок уставок спрацювання дистанцiйного захисту починаiться з вiдображення на рисунку гальванiчно зтАЩiднаних елементiв електричноi мережi , де буде встановлений дистанцiйний захист. На цьому рисунку наносяться довжини дiлянок лiнiй з iх первинними реактивними опорами ( Х Ом/фазу). Реактивнi опори Х лiнiй i визначальними для визначення зон дii окремих ступеней дистанцiйного захисту. Тому уставки спрацювання вiдображаються саме для реактивних складових опору (рис. 3.2).

Рис. 3.2. Зони дii окремих ступеней дистанцiйного захисту
Розглянемо, як визначаiться уставки спрацювання тАУ реактивний та активний опори спрацювання та час для захисту лiнii без вiдгалужень. Окремо визначаються уставки за реактивним опором, окремо тАУ за активним.
Розрахунок уставок спрацювання за реактивним опором
I тАУа ступiнь
Перша ступiнь вибираiться з умови забезпечення селективностi роботи захисту (неспрацювання пiд час к.з. на сумiжнiй лiнii Л2) i захищаi порядку 85% довжини лiнii Л1. Час ii спрацювання складаi 0,02 тАУ 0.04 с. Значення первинного реактивного опору першоi ступенi визначаiться з виразу:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.1)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.1)
де  ВатАУ реактивна складова опору лiнii Л1.
ВатАУ реактивна складова опору лiнii Л1.
I тАУа ступiнь пiсля АПВ
Перша ступiнь з дiiю пiсля АПВ призначена для захисту лiнii, коли дiя АПВ i неуспiшною i пошкодження слiд вимикати повторно, але з меншою витримкою часу тАУ з часом дii першоi ступенi. З цiiю метою розширюiться зона дii першоi ступенi. Вона охоплюi порядку 120% ii довжини. Значення первинного опору спрацювання цiii ступенi визначаiться з виразу:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.2)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.2)
II тАУа ступiнь
Умовою вибору опору спрацювання II-i ступенi i умова узгодження з роботою I-i ступенi дистанцiйного захисту сумiжного елемента (лiнii Л2) тАУ зона дii II-i ступенi не повинна виходити за межi другоi лiнii, а з врахуванням забезпечення селективностi роботи (щоб вона не спрацьовувала пiд час к.з. в кiнцi лiнii Л2) ‑ за межi роботи I-i ступенi захисту сумiжного елемента (лiнii Л2). Тому вона повинна охоплювати повнiстю лiнiю Л1 та порядку 80% довжини сумiжноi лiнii тАУ лiнii Л2:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.3)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.3)
де  ВатАУ реактивна складова опору лiнii Л2.
ВатАУ реактивна складова опору лiнii Л2.
Час спрацювання другоi ступенi вибираiться на ступiнь селективностi бiльшим часу спрацювання першоi ступенi захисту сумiжного елементу тАУ лiнii Л2:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.4)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.4)
де ВатАУ ступiнь селективностi.
Ступiнь селективностi повинна враховувати час спрацювання вимикача Q2 сумiжного елемента (лiнii Л2), часу повернення вихiдних кiл захисту сумiжного елемента з врахуванням розкиду iхнiх часових характеристик.
Час спрацювання другоi ступенi становить порядку 0,3 тАУ 0,4 сек.
III тАУа ступiнь
Третя ступiнь дистанцiйного захисту виконуi функцiю ближнього резервування тАУ резервуi роботу першоi та другоi ступеней. Крiм того, вона може виконувати функцiю дальнього резервування тАУ резервувати роботу захистiв сумiжного елемента тАУ лiнii Л2. Тому вона повинна повнiстю охоплювати як лiнiю Л1, так i лiнiю Л2. Для забезпечення надiйностi дальнього резервування уставка спрацювання третьоi ступенi вибираiться з умови охоплення дiлянки третьоi лiнii Л3 тАУ порядку 80% довжини лiнii Л3. Виходячи з цих умов уставка спрацювання третьоi ступенi визначаiться з виразу:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.5)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.5)
Час спрацювання третьоi ступенi дистанцiйного захисту вибираiться на ступiнь селективностi бiльшим часу спрацювання третьоi ступенi захисту сумiжноi лiнii тАУ лiнii Л2:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.6)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.6)
Пускова зона призначена для виявлення пошкодження в мережi та запуску алгоритму дистанцiйного захисту. Опiр спрацювання пусковоi зони в спрямуваннi потужностi вiд шин в лiнiю визначаiться як подвоiне значення уставки спрацювання третьоi ступенi:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.7)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.7)
Опiр спрацювання пусковоi зони в напрямку потужностi вiд лiнii до шин визначаiться як половина вiд значення уставки спрацювання пусковоi зони в прямому спрямуваннi:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.8)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.8)
Розрахунок уставок спрацювання за активним опором
Для визначення уставок спрацювання дистанцiйного захисту за активним опором пiд час однофазного к.з. приймаiться максимальне значення напруги електричноi дуги 12 кВ, мiнiмальний струм в мiсцi пошкодження приймаiться 1000 А. Для таких прийнятих параметрiв первинне значення опору дуги складаi
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.9)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.9)
В iмпеданснiй площинi зона дii обмежуiться по осi абсцис уставками, якi вiдповiдають активному опору (рис. 3.1). Цi уставки для кожноi зони спрацювання визначаються наступним чином.
I тАУа ступiнь
Перша ступiнь вибираiться, як i перша ступiнь за реактивною складовою, з умови забезпечення селективностi роботи захисту (неспрацювання пiд час к.з. на сумiжнiй лiнii Л2) i захищати порядку 85% довжини лiнii Л1, але на вiдмiну вiд реактивноi складовоi, вона повинна враховувати опiр дуги:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.10)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.10)
де  ВатАУ активний опiр лiнii, яка захищаiться;
ВатАУ активний опiр лiнii, яка захищаiться;  ВатАУ опiр дуги. У формулi (3.10) враховуiться тiльки половина опору дуги, тому що вiн додаiться до повного опору шлейфа i тому входить в повний опiр кожноi фази лише наполовину.
ВатАУ опiр дуги. У формулi (3.10) враховуiться тiльки половина опору дуги, тому що вiн додаiться до повного опору шлейфа i тому входить в повний опiр кожноi фази лише наполовину.
Другою умовою вибору уставки спрацювання першоi ступенi i вiдлагодження вiд хибного спрацювання пiд час максимального навантаження лiнii:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.11)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.11)
де:  ВатАУ номiнальна напруга лiнii;
ВатАУ номiнальна напруга лiнii;  ВатАУ максимальний струм в лiнii, який визначаiться максимальним навантаженням:
ВатАУ максимальний струм в лiнii, який визначаiться максимальним навантаженням:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.12)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.12)
де:  ВатАУ максимальна потужнiсть, яка передаiться по лiнii.
ВатАУ максимальна потужнiсть, яка передаiться по лiнii.
Коефiцiiнт 0,9 в формулi (3.11) визначаi мiнiмальну напругу лiнii.
З двох умов (3.10) та (3.11) вибираiться менше значення.
II тАУа ступiнь
Умовою вибору опору спрацювання II-i ступенi аналогiчно як i для II ступенi за реактивною складовою i умова узгодження з роботою I-i ступенi дистанцiйного захисту сумiжного елемента (лiнii Л2) тАУ зона дii II-i ступенi не повинна виходити за межi другоi лiнii, а з врахуванням забезпечення селективностi тАУ за межi роботи I-i ступенi захисту сумiжного елемента (лiнii Л2). Тому вона повинна охоплювати повнiстю лiнiю Л1 та порядку 80% довжини сумiжноi лiнii тАУ лiнii Л2 з врахуванням опору дуги:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.13)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.13)
де  ВатАУ активна складова опору лiнii Л2.
ВатАУ активна складова опору лiнii Л2.
Другою умовою вибору уставки спрацювання другоi ступенi i вiдлагодження вiд хибного спрацювання пiд час максимального навантаження лiнii, згiдно (3.11).
З двох умов (3.11) та (3.13) вибираiться менше значення.
III тАУа ступiнь
Уставка спрацювання третьоi ступенi за активною складовою аналогiчно як i за реактивною складовою з врахуванням опору дуги визначаiться з виразу:
 ВаВаВаВаВаВаВаВаВаВаВа (3.14)
ВаВаВаВаВаВаВаВаВаВаВа (3.14)
Другою умовою вибору уставки спрацювання третьоi ступенi за активною складовою опору i вiдлагодження вiд хибного спрацювання пiд час максимального навантаження лiнii, згiдно (3.11).
З двох умов (3.11) та (3.14) вибираiться менше значення.
4. ЦИФРОВРЖ ЗАХИСТИ ТРАНiОРМАТОРРЖВ
4.1 Загальна характеристика цифрових захистiв трансформатора
Сучаснi цифровi захисти трансформаторiв виконують у виглядi багатофункцiональних комплексiв. Тобто один пристрiй може виконувати функцii диференцiйного захисту, захисту вiд надструмiв зовнiшнiх к.з., захисту вiд перевантажень, захисту вiд коротких замикань на землю, виконувати функцii вимiрювання, реiстрацii параметрiв аварiйних режимiв, деякi функцii автоматики, керування тощо. До того ж основнi характеристики цифрових захистiв та автоматики мають суттiво кращi показники, нiж захисти, реалiзованi з використанням електромеханiчних чи напiвпровiдникових елементiв.
Для прикладу розглянемо цифровий пристрiй фiрми ALSTOM R3IPM, призначений для захисту триобмоткового трансформатора (автотрансформатора).
Схема пiдтАЩiднання цього пристрою до вторинних кiл трансформаторiв струму триобмоткового трансформатора наведена на рис. 4.1. На рисунку використано умовнi та позицiйнi позначення, прийнятi згiдно класифiкацii ANSI з РЗА (повна класифiкацiя кодiв ANSI наведена в додатку).
Пристрiй виконуi наступнi функцii:
В· трифазний диференцiйний захист трансформатора;
В· двоступеневий трифазний захист вiд перевантажень;
В· трифазний максимальний струмовий захист вiд надструмiв зовнiшнiх к.з.;
В· захист вiд замикань на землю;
В· резервування вiдмови вимикача;
В· вимiрювання фазних струмiв з усiх сторiн трансформатора;
В· вимiрювання та запамтАЩятовування координат режиму та параметрiв спрацювання захистiв пiд час аварiй у мережi: струмiв замикання на землю, максимальних значень струмiв к.з., значень струмiв у струмових колах диференцiйного захисту;
В· дiагностування резерву вимикачiв тАУ вимiрювання та запамтАЩятовування рiвня зношення полюсiв вимикача ( );
);
В· реiстрування струмiв к.з.;
В· реiстрування логiчних сигналiв захистiв, в тому числi реiстрування спрацювання окремих ступенiв захисту;
В· реiстрування логiчних сигналiв вiд зовнiшнiх пристроiв;
В· керування зовнiшнiми пристроями;
В· пересилання iнформацii на вищi рiвнi керування через комп'ютерну мережу.
Для звтАЩязку iз зовнiшнiми пристроями захист маi 7 входiв (на рис. 8.39 тАЬвхiд1тАЭ ¸ тАЬвхiд7тАЭ), функцii птАЩяти з яких призначають довiльно. Це може бути керування даного пристрою iншими пристроями, блокування його роботи, перемикання груп уставок захистiв тощо.
Пристрiй маi 12 вихiдних реле (на рис. 4.1 Х1 ¸ Х12), функцii 11 iз яких задають довiльно. Це може бути дiя на вихiднi кола вимикання вимикачiв, дiя в кола сигналiзацii, дiя на iншi вихiднi пристроi тощо. Одне вихiдне реле (Х12) використовують для дiагностування справностi пристрою.
На лицевiй панелi пристрою розмiщено 13 свiтлодiодiв, функцii 6 iз них задають довiльно, з допомогою решти контролюють параметри пристрою, наприклад, наявнiсть напруги живлення, увiмкнений стан пристрою, несправнiсть тощо.
Для керування пристроiм на лицевiй панелi розмiщена клавiатура, а для контролю за параметрами спрацювання пристрою (уставками, константами тощо) на переднiй панелi розмiщено дисплей на рiдких кристалах.
Керування пристроiм, його налагодження можна здiйснювати вiд персонального комп'ютера, який пiдтАЩiднують до послiдовного порту на лицевiй панелi пристрою, або через iнтерфейс локальноi мережi.
Схема пiдтАЩiднання та розрахунок параметрiв спрацювання цифрового пристрою маi ряд особливостей.
Вториннi обмотки трансформаторiв струму зi всiх сторiн силового трансформатора зтАЩiднують у зiрку, незважаючи на схеми зтАЩiднання обмоток силового трансформатора. Це даi можливiсть розвантажити тi трансформатори струму, якi для органiзацii традицiйного диференцiйного захисту зтАЩiднувались в трикутник. Корегування фазового зсуву, викликаного рiзними групами зтАЩiднання обмоток трансформатора, а також вiдлагодження диференцiйного захисту вiд хибноi роботи пiд час зовнiшнiх однофазних к.з. реалiзують на цифровому рiвнi алгоритмiчно. Для цього у вихiднiй iнформацii задають характер зтАЩiднань обмоток силового трансформатора, групи зтАЩiднань. У пристроi передбачена можливiсть задавати полярнiсть трансформаторiв струму. Вимiрювання струмiв вiд трансформаторiв струму може здiйснюватись без змiни знаку, або знак може iнвертуватись. Тобто на цифровому рiвнi можна здiйснювати змiну полярностi трансформатора струму, не змiнюючи фiзично його пiдтАЩiднання у вторинних колах трансформаторiв струму.
Уставки спрацювання за струмом окремих захистiв задають у вiдносних одиницях, зведених до номiнальних вторинних струмiв трансформаторiв струму тАУ 5А або 1А.
Для роботи цифрового пристрою необхiдно ввести ряд констант. Вони можуть вводитись з клавiатури, розмiщено на лицевiй панелi або з комп'ютера через спецiальний iнтерфейс (на рис. 8.39 тАЬРЖнтерфейс ПКтАЭ). До цiii iнформацii належать:
В· номiнальна частота системи (50 Гц, 60Гц);
В· номiнальнi струми силового трансформатора для всiх сторiн;
В· номiнальна потужнiсть кожноi сторони силового трансформатора;
В· номiнальнi первиннi та вториннi струми всiх трансформаторiв струму, як фазних, так i трансформатора струму нульовоi послiдовностi;
В· базовi струми для кожноi сторони силового трансформатора, якi визначають як вiдношення номiнального струму силового трансформатора до номiнального первинного струму трансформатора струму вiдповiдноi сторони.
Розрахунок параметрiв спрацювання окремих захистiв, виконаних на цифровому пристроi R3IPT маi ряд особливостей у порiвняннi з розрахунком параметрiв спрацювання захистiв, реалiзованих з використанням електромеханiчноi та напiвпровiдниковоi базi, якi були розглянутi у попереднiх роздiлах. Розглянемо розрахунок параметрiв спрацювання основних захистiв, виконаних iз використанням пристрою R3IPT для триобмоткового трансформатора, який живиться зi сторони високоi напруги. У формулах розрахунку використовуються деякi умовнi позначення, якi прийнятi за кордоном.
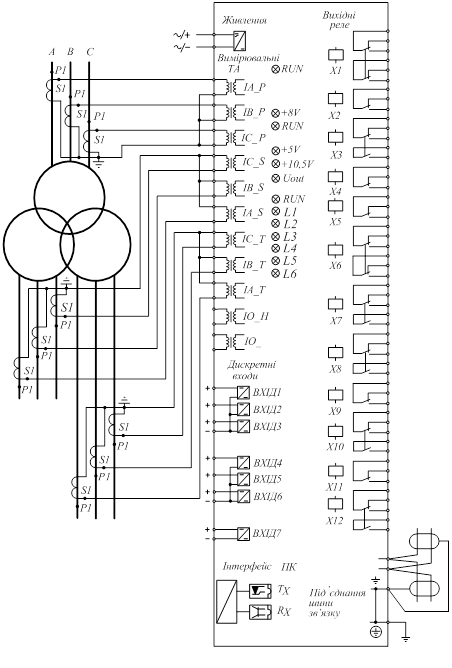
Рис. 4.1. Схема пiдтАЩiднання цифрового пристрою R3IPTЦифровий диференцiйний захист трансформатора
4.2 Диференцiцйний захист трансформатора
Для розрахунку диференцiйного захисту розраховують його характеристику гальмування, наведену на рис. 4.2. Ця характеристика i подiбною до характеристики гальмування реле серii ДЗ
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы