Проектирование и расчёт полосного фильтра
Цепи фильтрации сигналов тАУ важная и неотъемлемая часть многих систем связи и электрических контрольно-измерительных устройств. Они служат для формирования частотных каналов в системах коммутации, разделения и преобразования электрических сигналов.
В большинстве случаев электрический фильтр представляет собой частотно-избирательное устройство. Следовательно, он пропускает сигналы определённых частот и задерживает или ослабляет сигналы других частот. Наиболее общими типами частотно-избирательных фильтров являются фильтры нижних частот (которые пропускают низкие частоты и задерживают высокие частоты), фильтры верхних частот (которые пропускают высокие частоты и задерживают низкие частоты), полосно-пропускающие фильтры (которые пропускают полосу частот и задерживают те частоты, которые расположены выше или ниже этой полосы) и полосно-заграждающие фильтры (которые задерживают полосу частот и пропускают те частоты, которые расположены выше или ниже этой полосы).
На практике невозможно реализовать идеальную амплитудно-частотную характеристику фильтра, поскольку требуется сформировать очень узкую переходную область. Следовательно, основная проблема при конструировании фильтра заключается в приближении реализованной реальной характеристики с заданной степенью точности к идеальной.
1. Анализ технического задания
Фильтры - это частотно-избирательные устройства, которые пропускают или задерживают сигналы, лежащие в определенных полосах частот. До 60-х годов для реализации фильтров применялись, в основном, пассивные элементы, т.е. индуктивности, конденсаторы и резисторы. Основной проблемой при реализации таких фильтров оказывается размер катушек индуктивности (на низких частотах они становятся слишком громоздкими). С разработкой в 60-х годах интегральных операционных усилителей появилось новое направление проектирования активных фильтров на базе ОУ. В активных фильтрах применяются резисторы, конденсаторы и усилители (активные компоненты), но в них нет катушек индуктивности. В дальнейшем активные фильтры почти полностью заменили пассивные. Сейчас пассивные фильтры применяются только на высоких частотах (выше 1 МГц), за пределами частотного диапазона большинства ОУ широкого применения. Но даже во многих высокочастотных устройствах, например в радиопередатчиках и приемниках, традиционные пассивные RLC-фильтры заменяются кварцевыми фильтрами и фильтрами на поверхностных акустических волнах.
Сейчас во многих случаях аналоговые фильтры заменяются цифровыми. Работа цифровых фильтров обеспечивается, в основном, программными средствами, поэтому они оказываются значительно более гибкими в применении по сравнению с аналоговыми. С помощью цифровых фильтров можно реализовать такие передаточные функции, которые очень трудно получить обычными методами. Тем не менее, цифровые фильтры пока не могут заменить аналоговые во всех ситуациях, поэтому сохраняется потребность в наиболее популярных аналоговых фильтрах тАФ активных RС-фильтрах.
Фильтры можно классифицировать по их частотным характеристикам, что в условном виде показано на рис. 1.1. На этом рисунке изображены характеристики фильтра нижних частот (ФНЧ), фильтра верхних частот (ФВЧ), полосового фильтра (ПФ), полосно-подавляющего фильтра (ППФ) и фильтра - "пробки" (режекторного фильтра - РФ). Характеристика фазового фильтра (ФФ) на рисунке не показана, т.к. его коэффициент передачи не изменяется с частотой. Основная функция любого фильтра заключается в том, чтобы ослабить сигналы, лежащие в определенных полосах частот, внести в них различные фазовые сдвиги или ввести временную задержку между входным и выходным сигналами.
С помощью активных RС-фильтров нельзя получить идеальные формы частотных характеристик в виде показанных на рис. 1.1 прямоугольников со строго постоянным коэффициентом передачи в полосе пропускания, бесконечным ослаблением в полосе подавления и бесконечной крутизной спада при переходе от полосы пропускания к полосе подавления. Проектирование активного фильтра всегда представляет собой поиск компромисса между идеальной формой характеристики и сложностью ее реализации. Это называется "проблемой аппроксимации". Во многих случаях требования к качеству фильтрации позволяют обойтись простейшими фильтрами первого или второго порядков. Проектирование фильтра в этом случае сводится к выбору схемы с наиболее подходящей конфигурацией и последующему расчету значений номиналов элементов для конкретных частот.
Однако бывают ситуации, когда требования к фильтрации сигнала могут оказаться гораздо более жесткими, и могут потребоваться схемы фильтров с характеристиками более высоких порядков, чем первый или второй.
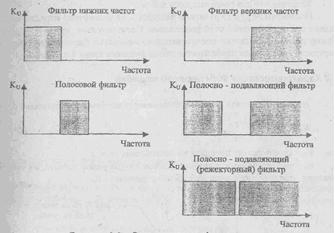
Рисунок 1.1- Основные типы фильтров.
Реальные характеристики фильтров, а именно нижних частот, верхних частот и полосового фильтра, - показаны на рисунке 1.2.
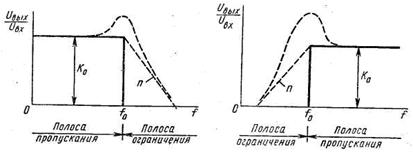
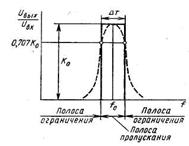
Рисунок 1.2 тАУ АЧХ фильтров.
На этих рисунках сплошными линиями изображены идеальные характеристики фильтров. Пунктирные линии показывают отклонение реальных характеристик от идеальных. Основными параметрами фильтров нижних и верхних частот являются частота среза f0, коэффициент передачи в полосе пропускания Ко, наклон АЧХ в полосе ограничения п и неравномерность АЧХ в полосе пропускания. Для полосовых фильтров по аналогии с избирательными усилителями вводят понятие добротности Q и усиления Ко на частоте f0.
2. Синтез схемы и расчет элементов фильтра
2.1 Исходные данные и требования для проектирования фильтра
| Тип фильтра тАУ ПФ |
Частота среза, f0 | 5000 | Гц |
Коэффициент передачи в полосе пропускания, К0 | 6 | |
| Наклон АЧХ в полосе ограничения, n | 40 | ВадБ/дек |
| Неравномерность АЧХ в полосе пропускания, ΔК | 20 | ВадБ |
| Полоса пропускания, Δf | 250 | Гц |
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы