Разработка пульта проверки входного контроля
1 Постановка задачи
2 Анализ существующего способа проверки АЭ и ПИ
3 Структурная схема проверки АЭ и ПИ с использованиемВа проверочной аппаратуры
4 Функциональная схема проверки АЭ и ПИ
5 Описание электрической принципиальной схемы пульта проверки
6 Описание электрической схемы цифро-аналового преобразователя
7 Расчет параметров в схеме датчика крена
8 Расчет параметров схемы ЦАП
9 Методика проверки
10 Конструкторско-технологическая часть
11 Организационно-экономическая часть
12 Охрана труда и окружающей среды
Заключение
Список используемой литературы
Приложение А
Приложение Б
Приложение В
Приложение Г
В связи с усложнением бортовой аппаратуры противотанковых управляемых ракет, применением в ней сложной цифровой и микропроцессорной схемотехники, возрастают требования к контрольно тАУ проверочной аппаратуре, обеспечивающей качественную проверку параметров аппаратуры электронной (АЭ) и приемника излучения (ПИ) на входном контроле.
Назревшей необходимостью является разработка
новых методов и средств проверки, исключающих выше перечисленные недостатки.
В дипломном проекте проведена разработка пульта проверки входного контроля и методики контроля, позволяющих провести проверку АЭ и ПИ по параметрам, обеспечивающим идентичность проверок как отдельно, так и в составе ракеты.
1 Постановка задачи
Требуется разработать пульт входного контроля аппаратуры электронной АЭ и приемника излучения ПИ изделий 9М133 (далее по тексту пульт проверки), отвечающий следующим требованиям:
- должна осуществляться проверка сквозного динамического коэффициента АЭ и ПИ на частотах вращения ракеты;
- в качествеВа имитатора вращения использовать имеющийся датчик крена гирокоординатора;
- должна осуществляться проверка цифровых выходов АЭ по каналам Y и Z;
- при проверках максимально использовать имеющиеся контрольно-измерительные средства и приспособления, применяемые для проверок изделия 9М133;
- время проверки ПИ и АЭ не более 1 минуты.
2 Анализ существующего способа проверки АЭ и ПИ
В настоящее время для контроля АЭ ПБА3.031.082 и ПИ ПБА2.029.001 используется достаточно сложная по устройству аппаратура, а ТУ на проверку включает множество пунктов от осмотра внешнего вида до контроля отдельных параметров.
Однако, при установке их в изделие возможны случаи, когда АЭ(ПИ) не удовлетворяют требованию, предъявляемому к изделию, которые возникают из-за различия методик проверок АЭ(ПИ) и АЭ(ПИ) в составе изделия.
Для устранения указанного недостатка возникла необходимость применения методики проверки АЭ и ПИ на входном контроле, идентичной методике проверки бортовой аппаратуры управления изделия 9М133.
Работоспособность бортовой аппаратуры управления в составе изделия 9М133 определяется поВа сквозному динамическому коэффициенту. Данный коэффициент характеризует совместную работу АЭ и ПИ в составе ракеты по отработке электромагнитом рулевого привода управляющих сигналов с выхода АЭ в зависимости от сигнала, поступающего на вход ПИ от контрольно-проверочной аппаратуры изделия 9М133.Ва
3 Структурная схема проверки АЭ и ПИ с использованиемВа проверочной аппаратуры
Во время преддипломной практики были изучены состав и электрические соединения составных частей изделия 9М133, а также контрольно-проверочная аппаратура, применяемая для проверки изделия, и с учетом этого была разработана структурная схема соединений для проверки АЭ и ПИ с использованием проверочной аппаратуры. Данная схема представлена в графической части и на рисунке 1. И включает в себя:
- проверочную аппаратуру;
- приемник излучения;
- аппаратуру электронную;
- отсек рулевого привода;
- источники питания.
Проверочная аппаратура предназначена для коммутации сигналов ПИ, АЭ, ОРП, источников питания и задания контрольных сигналов, подаваемых на вход ПИ, обработки сигналов сВа выхода АЭ и выдачи результатов проверки тАУ ВлгоденВ» или ВлотказВ».
Отсек рулевого привода являются составной частью изделия и служит реальной нагрузкой для АЭ.
Данная схема отображает общий подход к проверке АЭ и ПИ на входном контроле как в составе изделия.
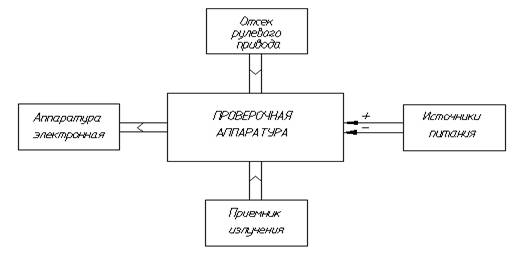 Рисунок 1.1 тАУ Структурная схема проверки.
Рисунок 1.1 тАУ Структурная схема проверки.
4 Функциональная схема проверки АЭ и ПИ
В соответствии с техническим заданием была разработана функциональная схема соединений для проведения проверок для изделияВа 9М133 с использованием имеющихся средства контроля и измерения 15С01.
Данная функциональная схема представлена в графической части.
Проверочная аппаратура представлена в виде двух составных частей тАУ КПА 15С01 и пульта проверки.
В КПА входит модуль измерения, предназначенный для формирования тестовых сигналов, подаваемых на излучатель, сигналов ФД1, ФД2.
ВаМодуль управления служит для контроля выхода на режим бортовой батареи (контроль +12В),Ва контроль сигналов управления Вых1, Вых2, поступающих с АЭ. ОЗУ КПА запоминает определенные параметры сигналов и сравнивает с заложенными в ее ПЗУ эталонными значениями.
Модуль согласования КПА тАУ дляВа осуществления передачи выходных сигналов с КПА ФД1, ФД2, а также литеры L1 и инвертирования L4, питания В±12В на пульт проверки, сигналов Вых1,Вых2, контроль +12В на КПА.
Излучатель тАУ для формирования лазерного излучения. Посредством него на приемник передаются командыВа изменения координат с проверочной аппаратуры.
Набор светофильтров предназначен для изменения уровня мощности излучателя на входе приемника излучения.
Пульт проверки осуществляет коммутацию электрических сигналов, поступающих с АЭ, ПИ, ОРП и КПА.
Для запиткиВа КПА требуется четыре источника В±12В, один В±5В и один источник В±50В для питания излучателя.
Для проверки АЭ и ПИ используются поочередно два ОРП.
Вольтметр предназначен дляВа контроля напряжения с выхода АЭ.ВаВаВа Аппаратура электронная и приемник излученияВа является составной частью
Вабортовой аппаратуры управления ракеты. Бортовая аппаратура управления предназначена для приема модулированного излучения лазера, преобразования его в электрический сигналы, формирования сигнала, определяющего координаты относительно оси луча, преобразования координат из неподвижной системы координат в систему, связанную с ракетой, преобразования электрических сигналов управления в механические перемещения рулей.
Помимо аппаратуры электронной и приемника излучения в состав аппаратуры управления ракеты входят следующие составные части: гирокоординатор (ГК), бортовая батарея (ББ) и отсек рулевого привода (ОРП).
АЭ предназначена для преобразования кодовой последовательности информационных импульсов, поступающих с ПИ. АЭ формирует релейный сигнал, скважность которого в каждую четверть оборота ракеты по крену определяет величину команд управления по тангажу и курсу, усиливает его по мощности и выдает два противофазных сигнала на управление одноканальным двухпозиционным рулевым приводом ракеты. В соответствии с величиной угловой скорости вращения ракеты по крену и временем с момента старта ракеты, АЭ программно изменяет величину команд, подаваемых на рулевой привод. Кроме того, АЭ осуществляет изменение начальной фазировки сигналов управления в зависимости от положения ракетыВа на пусковой установке. В случае прерывания информационного сигнала, АЭ запоминает последние координаты ракеты до момента появления информационного сигнала, прием при отсутствии сигнала на время более 1,5 секунды обе координаты обнуляются.
ВаПреобразование команд управления в отклонения рулей по курсу и тангажу происходит в бортовой аппаратуре ракеты следующим образом.
После входа ракеты в луч, расположенный на борту ракеты ПИ вырабатывает электрический сигнал U (см. рис. 4.1) пропорциональный отклонению h изделия от оси луча. В формирователе команд АЭ U корректируется, суммируется с независимыми от отклонения h программными командами и с помощью опорного сигнала Uг, вырабатываемого ГК соответственно крену ракеты g, преобразуется в одноканальный сигнал V, управляющий работой двухпозиционного релейного рулевого привода РП. Отклонение руля на угол d вызывает перемещение ракеты Р к оси луча.ВаВа
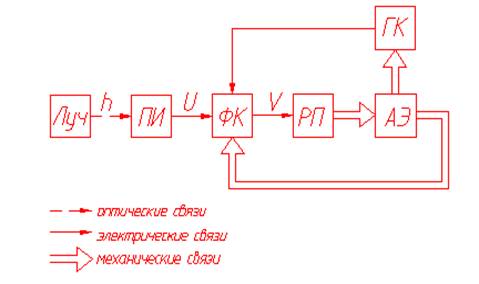
Рисунок 4.1 тАУ Формирование команд управления и преобразование их в отклонение ракеты по курсу и тангажу
Для контроля параметров бортовой аппаратуры изделия в контрольно-проверочной аппаратуре заложен следующий способ.
Формируют электрический сигнал, имитирующий отклонение изделия относительно точки прицеливания по определенному закону, преобразовывают его в электромагнитное излучение и подают на вход приемного тракта изделия.
Одновременно с заданием сигнала, поступающего на вход приемного тракта, формируют сигнал, имитирующий вращение изделия по углу крена на траектории, и подают его на датчик крена изделия.
Сравнивают текущие величины команд управления на рулевом приводе с расчетными значениями команд, соответствующим сигналу, имитирующего отклонения изделия относительно точки прицеливания по определенному закону, и по результатам сравнения производят оценку работы бортовой аппаратуры изделия.
В изделии для создания опорныхВа сигналов, по которым в АЭ происходит преобразование команд управления из измерительной системы координат в систему, связанную с вращающей по крену ракетой предназначен гирокоординаторВа (ГК), представляющий собой трехстепенной свободный гироскоп с пружинным разгоном ротора и оптронным датчиком крена. В проверочной аппаратуре имитация вращения датчика крена осуществляется с помощью генератора и ключевого устройства.
Сигналы ФД1,ФД2 (см. ВлЭпюры сигналовВ» и рисунок 4.2) имеют форму меандр. При этом сигнал ФД1 опережает ФД2 на 90В°.
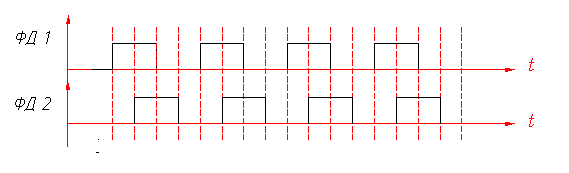
Рисунок 4.2 тАУ Сигналы ФД1, ФД2
Сигнал ИКООР. представляет собой посылки координатных импульсов (см. граф. часть ВлЭпюры сигналовВ» и рис.4.3). Данный сигнал от КПА поступает на излучатель, сигнал с выхода излучателя поступает на приемник излучения.
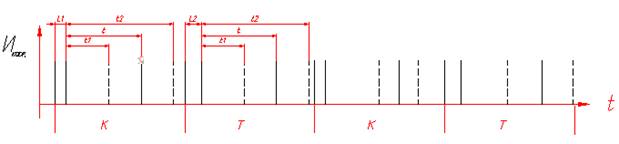
Рисунок 4.3 тАУ Координатные импульсы
Информация о координатах Y, Z (об отклонениях по курсу и тангажу) заключена в длительности интервалов от t1 до t2. А различие Y, Z по литерным интервалам L1, L2 тАУ длительностям между импульсами в паре. Определение координат производится по среднему значению длительностей первого и последнего в посылке интервалов времени между парными импульсами, соответствующими началу и концу посылки. Концом посылки является пара, после которой отсутствует сигнал данной литеры в течении времени более (0.125 тАУ 0.5) мс.
Команда К тАУ закон изменения длительностей координатных интервалов t, t1, t2, с учетом изменения частот fФД в интервале от 2,9 до 17,4 Гц (см. ВлЭпюры сигналовВ» и рисунок 4.4).
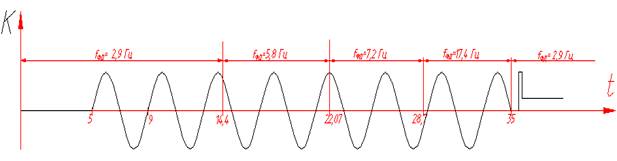
Рисунок 4.4 тАУ Закон изменения координат
Переключение частот применяется в связи с изменением частоты вращения ракеты в процессе полета по зависимости 2,9 Гц тАУ 5,8 Гц тАУ 7,2 Гц тАУ 17,4 Гц тАУ 2,9 Гц.
Таким образом, на АЭ поступает информация о координатах Y, Z, опорный сигнал об изменении положения ракеты по крену тАУ ФД1, ФД2, и, кроме того, при формировании команд управления Вых1, Вых2 должна учитываться компенсация веса по координатам Z. Компенсация веса необходима для уравновешивания силы тяжести, при чем, в начале полета она должна быть большой величины, с увеличением скорости ракеты она уменьшается, когда же скорость ракеты падает, компенсация веса снова увеличивается.
Сигналы управления с отработкой компенсации веса и без учета изменения координат показаны на рисунке 4.5 и в графической части ВлЭпюры сигналовВ».
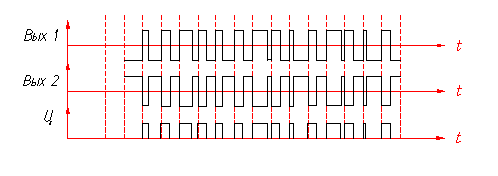
Рисунок 4.5 тАУ Сигналы управления Вых 1, Вых 2 и их параметры, которые запоминает КПА
Данные сигналы являются двухполярными и противофазными, и, как видно из рисунка 4.5, ОЗУ КПА запоминает положительную полуволну одного из сигналов и затем микропроцессор сравнивает ее величину с заложенными в ПЗУ величинами.Ва
Кроме того, АЭ должна отрабатывать такие сигналы, как установка литеры 1(L1) и литерыВа 2 (L2), а также L4 (инвертирование/ неинвертирование).
Установка литеры 1 и литеры 2 предназначена для приема изделием информационного сигнала от своей ПУ при одновременной работе двух ПУ по двум целям (перекрестная стрельба). В этом случае на первой ПУ при работе с L1 производят закоротку входа АЭ по цепи L1, а при работе с L2 на второй ПУВа вход по цепи L1 находится в обрыве.
Команда установки L4 (закоротка входа АЭ по цепи L4) производится только при работе с боевой машины в случае крепления изделия на установке с разворотом продольной оси на 180В°. в этом случае АЭ формирует сигналы Вых 1, Вых 2 со сдвигом фазы на 180В° для компенсации разворота изделия.
ВаСигнал Влконтроль +12ВВ» обеспечивает проверку выхода бортовой батареи на режим. За время не менее 0,4 с напряжение батареи должно достигнуть значения не менее 10,9В, т.к. это наименьшее напряжение, при котором может работать АЭ.Ва
5 Описание электрической принципиальной схемы пульта проверки
Электрическая схема пульта проверки приведена в графической части ПП. 000.Э3.
Разъемы Х1, Х2 относятся к АЭ и ПИ соответственно, А1 тАУ цифро-аналоговыйВа преобразователь, А2 тАУ датчик крена, Х3 тАУ разъем, соединяющий пульт проверки с КПА, Х6, Х7 относятся к двум отсекам рулевых приводов.
Конденсаторы С1тАжС4 предназначены для фильтрации источника питания.
Стабилизатор напряжения DA1, реализованный на микросхеме К142ЕН8А, стабилизирует напряжение с В±12В до В±9В, необходимого для работы датчика крена.
Тумблер SA1 предназначен для подачи питания. Причем после завершения проверки и выключения SA1 автоматически происходит соединение с ОРП2, а ОРП1,который был подключен во время проверки отключается. Следующая проверка будет проводиться с ОРП2. Переключение отсеков рулевых приводов обеспечивается переключением реле К1тАжК3. Конденсаторы С8тАжС10 за время проверки (с момента включения SA1) заряжаются и в момент выключения SA1 разряжаются на К1тАжК3 соответственно, реле переключаются.
Тумблер SA2 предназначен для возможности замера напряжения открытого и закрытого ключа, а также тока утечки ключа датчика оборотов. Вольтметр подключается к зажимам ХS5, ХS6.
При нажатии переключателя SA3 (6 раз) и соответственно заряда конденсатора С11Ва имитируется отсчет 6 оборотов ракеты. После шестого нажатия должен загореться светодиод Вл-12В МРВ». Отсчет шести оборотов ракеты необходимо обеспечивать, для того, чтобы сигнал на заряд конденсаторов ПИМов с датчика оборотов пошел после достижения ракетой расстояния порядка 100м от места пуска.
Зажимы ХS1, XS2 предназначены для снятия сигналов Y, ZВа с аналоговых выходов ЦАП.
6 Описание электрической схемы цифро-аналового преобразователя
Цифро-аналоговый преобразователь реализован на двух микросхемах типа К572ПА1А, и вне ОУ на микросхеме 1401УД2А.
Микросхема умножающего ЦАП типа К572ПА1 является универсальным структурным звеном для построения микроэлектронных ЦАП, АЦП и управляемых кодом делителей тока. Благодаря малой потребляемой мощности, достаточно высокому быстродействию, возможности реализации полного двух- и четырехквадратного умножения, небольшим габаритам ЦАП К572ПА1 находит широкое применение в различной аппаратуре. Все ее элементы выполнены в одном кристалле. Данная микросхема предназначена для преобразования 10-разрядного прямого параллельного двоичного кода на цифровых входах в ток на аналоговом выходе, который пропорционален значениям кода и (или) опорного напряжения.
В состав ИiАП К572ПА1 входят прецизионная поликремневаяВаВаВаВаВаВаВа резисторная матрица (РМ) типа R тАУ 2R, усилители-инверторы (УИ) для управления токовыми ключами, токовые двухпозиционные ключи.
Двоичный закон распределения токов в ветвях РМ соблюдается при условии равенства потенциалов выходов 1 и 2 микросхемы. Это обеспечивается подключением выхода 1 к инвертирующему входу ОУ, охваченного отрицательной обратной связью. Неинвертирующий вход ОУ соединяется с выходом 2 и с шиной аналоговой земли. При этом осуществляется преобразование тока на выходе 1 в пропорциональное ему напряжение на выходе ОУ. Резистор Rо.с определяет значение коэффициента преобразования и напряжения в конечной точке шкалы.
Для достижения стабильности основных параметров преобразования при воздействии внешних факторов резистор обратной связи Rо.с = R размещен на кристале микросхемы. При использовании источника опорного напряжения (ИОН) UИОН = 10,24 В с внутренним резистором Rо.с значение Uвых ОУ = 10,24 В, а шаг квантования, т. е. расчетное приращение выходного напряжения при изменении входного кода на единицу младшего разряда, h = 10 мВ. Номинальное значение выходного тока составляет 1 мА, а фактическое может изменяться в пределах от 0,5 до 2 мА.
Значения основных параметров ИС зависят в первую очередь от точности соблюдения отношения Rо.с / R = 1 и R / 2R = 0,5 для всех звеньев РМ.
Преобразователь К572ПА1 допускает работу при напряжении питания в диапазоне от 5 до 17 В и изменении опорного напряжения в пределах В±17 В.
Использование внешнего ОУ предполагает правильный его выбор, исходя из точностных и скоростных свойств преобразователя. Для сохранения точности ЦАП следует использовать ИС ОУ с напряжением смещения не более 5 мВ (т.е. 0,5 МР). Желательно также, чтобы время установления ОУ не превышало 2 тАУ 5 мкс.ВаВа
В качестве внешнего ОУ, на основании использования двух микросхем ЦАП, была выбрана микросхема серии К1401 представляющая собой сборку, состоящую из четырех ОУ. Микросхема К1401УД2А имеет напряжение питания от 3 до В±16,5 В; Iвых = 2тАж10 мА, Uвых = 2,5тАж12,5 В.
Схема электрическая принципиальная цифро-аналогового преобразователя представлена в графической части ПП.020 Э3.
Напряжение питания данной схемы В±12 В (Е1 = +12 В, Е2 = - 12 В). ОпорноеВа напряжение UR = тАУ 2 В микросхем ЦАП, которое получается делением напряжения источника питания Е1 = - 12 В делителем, реализованном на R1,R2 и VD1,.
Электрические сигналы с аппаратуры электронной А1 (Y0 тАУ Y4; Z0 тАУ Z4) в виде двоичного кода поступают на цифровые входы микросхем ЦАП DD1, DD2, при чем младшие разряды (МР) микросхем ЦАП соединены с общим проводом. Двоичный код с выходов А1 Y5, Z5 поступает на инверсные входы ОУ DA1.3, DA1.4, выполняющих роль инверторов и используемых в данной схеме для уменьшения количества микросхем, выходные сигналы с данных ОУ поступают на цифровые входы 4 (СР) DD1, DD2.
Выходы 1 (J1) DD1, DD2 соединены с инверсными входами ОУ DA1.1, DA1.2 выходы 2 (J2) DD1, DD2 тАУ с не инверсными входами ОУ DA1.1, DA1.2. Включение резисторов R3, R4, с питанием 5 В обеспечивает смещение напряжений на выходах DA1.1, DA1.2 от (2, 0) до (-1, +1). Конденсаторы C1, C2, включенные в выходные цепи DA1.1, DA1.2, образуют фильтр. Выходные сигналы DA1.1, DA1.2 (Y, Z) являются аналоговыми.
7 Расчет параметров в схеме датчика крена
Для работы данного датчика необходим стабилизатор напряжения, стабилизирующий напряжение на уровне +9В. Данный стабилизатор реализован на микросхеме К142ЕН8А. Электрическая схема соединений стабилизатора и датчика крена приведена на рисунке 7.1. Входное напряжение +12В подается на вывод 17 стабилизатора напряжения DA1, с вывода 2 DA1 снимается напряжение + 9В, которое является входным для датчика крена, реализованном на светодиодах VD5,VD6 и фотодиодах VD4,VD3. При чем в цепь VD1,VD2 включено нагрузочное сопротивление RН, нагрузкой VD3,VD4 являются резисторы RФД1 и RФД2 соответственно, которые находятся в аппаратуре электронной. Конденсаторы С5тАжС7 включены в цепь DA1 для защиты стабилизатора от самовозбуждения при перепадах входного напряжения.Ва
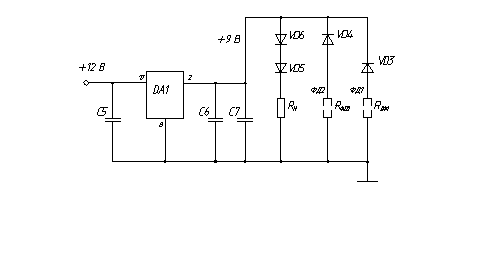
Рисунок 7.1 тАУ Датчик крена. Схема электрическая
Так как необходимо обеспечить ток через резисторы RФД1 и RФД2 IRфд1 = IRфд2 = 50мкА, для поддержания фронтов и спадов выходных импульсовВа токов светодиодов, (а соответственно и характеристик ФД1 и ФД2), принимаем ток через резистор RНВа IRн = 50мА.
Рассчитаем сопротивление RН, при условии, что падение напряжения на светодиодах VD1,VD2 UVD1= UVD2 = 1,8 В.
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа URн = Uвх тАУ (UVD5+ UVD6),Ва ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.1)
RН = ![]() , ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.2)
, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.2)
где URн тАУ падение напряжения на резисторе RН,В;
ВаВаВаВаВаВа Uвх тАУ входное напряжение датчика крена, равное + 9В;
ВаВаВаВаВаВа UVD5,UVD6 тАУ прямое падение напряжения на светодиодах VD5,VD6, равное 1,8В;
ВаВаВаВаВаВаВа IRн тАУ ток, протекающий через резистор Rн, равный 50мА.
URн = 9 тАУ (1,8+ 1,8) = 5,4В
RН = ![]() Ва= 108 Ом.
Ва= 108 Ом.
Рассчитаем мощность резистора
RН по следующей формуле:
Р =Ва
IRн* URн,Ва ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.3)
Р = 50*10-3*5,4 = 0,27 Вт.
Следовательно, выбираем резистор
RН типа С2-33Н-0,5-110 Ом В± 5%-А-Д-В. Согласно схеме ПП.000 Э3 RН = R9.
Рассчитаем сопротивления
RФД1 и RФД2.
RФД1 = RФД2 =![]() , ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.4)
, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.4)
IR = IRфд1 = IRфд2, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (7.5)
где IR1 тАУ ток, равный токам через резисторы RФД1,RФД2, равный 50 мкА.
RФД1 = RФД2 =![]() Ва= 180
Ва= 180
8 Расчет параметров схемы ЦАП
Рассчитаем делитель напряжения, обеспечивающий опорное напряжение ЦАП UR = тАУ 2 В, реализованный на стабилитроне VD1 и резисторах R1,R2.
Электрическая схема делителя представлена на рисунке 8.1.
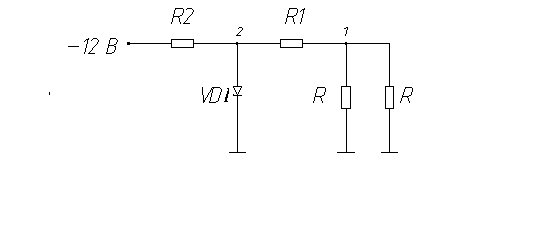
Рисунок 8.1 тАУ Делитель напряжения. Схема электрическая
В соответствии с рисунком 8.1 в т. 1 UR = тАУ 2 В. Известно, что резистор РМ R = 10,24 кОм, и по закону Кирхгофа имеем:
IR1 = IR + IR, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.1)
где IR1 тАУ ток, протекающий через резистор R1, мА;
ВаВаВаВаВаВа IR тАУ ток,Ва протекающий через резистор R резисторной матрицы ЦАП, мА.
Ток IRрассчитаем по формуле (8.2):
IR =![]() , ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.2)
, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.2)
где UR тАУ напряжение на резисторе R РМ, В;
ВаВаВаВаВаВа R тАУ резистор РМ, кОм.
IR= ![]() В» 0,2 мА.
В» 0,2 мА.
В соответствии с формулой (8.1) определимВа IR1.
IR1 = 2*0,2 = 0,4 мА.
Так как необходимо понизить напряжение с Е1 = тАУ 12 В до UR = тАУ 2, в качестве опорного элементаВа выбираем стабилитрон 2С170А с напряжением стабилизацииВа UVD= 7 В. Для дальнейших расчетов необходимо знать ток Iст стабилитрона, при котором нормируется напряжение стабилизации, для 2С170А Iст = 10 мА. Тогда по закону Кирхгофа в т.2 имеем:
IR2 = IR1 + Iст.,Ва ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.3)
где IR2 тАУ ток, протекающий через резистор R2,мА;
ВаВаВаВаВа Iст. - ток стабилитрона 2С170А, при котором нормируется напряжение стабилизации UVD= 7 В, мА.
IR2 = 0,4 + 10 = 10,4 мА.
Тогда можем рассчитать сопротивление R2:
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВа R2 = ![]() ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.4)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.4)
ВаВаВа R2 =![]() В» 510 Ом
В» 510 Ом
Далее рассчитаем сопротивление R1:
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВаВа R1 = ![]() , ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.5)
, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.5)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВа ВаВаВаU2 = Е1 - UVD, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.6)
где U2 тАУ падение напряжения на резисторе R1, равное 5В.
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа R1 = ![]() В»12,4 кОм.
В»12,4 кОм.
Рассчитаем мощность R1, R2 по формуле (8.7):
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа РR1(R2) = U2*IR1(R2), ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВа(8.7)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа PR1 = 5*0,004 = 0,02 Вт
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаPR2 = 5*10,4*10 = 0,052 Вт
Из стандартного ряда сопротивлений выбираем сопротивления R1 С2-29-0,125-12,4кОм В± 1% -А-В, R2 С2-33Н-0,125-510 ОМ В± 5% -А-Д-В.
ВаДля того, чтобы на выходах DA1.1, DA1.2 сместить напряжение на 1 В, в схему включены резисторы R3, R4. Расчет их номиналов поясняет схема, приведенная на рисунке 8.2.
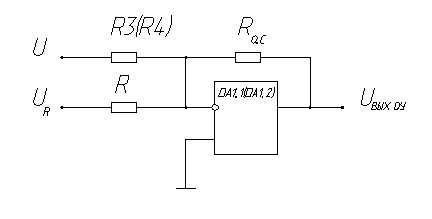
Рисунок 8.2
Так как напряжение на выходах DA1.1, DA1.2 необходимо сместить на 1В, то ток, протекающий через резистор R3(R4), определим из выражения (8.8):
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВа IR3(R4) = ![]() , ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.8)
, ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.8)
где IR3(R4) тАУ ток, протекающий через резистор R3(R4), мА.
Зная, что IR = 0,2 мА, получим из выражения (8.8) ток IR3(R4):
IR3(R4) =![]() Ва= 0,1 мА.
Ва= 0,1 мА.
Определим значение R3(R4) из выражения (8.9):
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВа R3(R4) =![]() ,ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.9)
,ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (8.9)
где U тАУ напряжение питания резисторов R3(R4), в соответствии с рисунком 8.2, равное 5 В.
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа R3(R4)Ва =![]() Ва= 50 кОм.
Ва= 50 кОм.
Рассчитаем мощность R3(R4) по формуле (8.10):
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВа РR3(R4) =ВаВа IR3(R4)* U,ВаВа ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВа(8.10)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаРR3(R4) = 0,1*10-3*5 = 0,005 Вт
ВыбираемВа R3(R4) = 50,5 кОм (С2-29-0,125-50,5 кОм).ВаВаВаВаВаВаВаВа
9 Методика проверки
9.1 Общие указания
9.1.1 Сборочные единицы приемник и аппаратура электронная должны иметь:
- целостность упаковки и наличие (сохранность) пломб ОТК и ПЗ;
- сопроводительную документацию, удостоверяющую их соответствие техническим условиям и конструкторской документации;
- клеймо ОТК 1 и представителя заказчика (свидетельство о приемке).
9.1.2 Проверкам, приведенным в настоящем разделе, подвергаются все поставляемые сборочные единицы.
Ва9.1.3 Все проверки проводятся в нормальных климатических условиях, которые характеризуются следующими значениями:
- температура воздуха от 15 до 35 В°С;
- относительная влажность воздуха от 45 до 80%;
- атмосферное давление от 645 до 795 мм рт. ст.
Ва9.1.4 Соблюдать меры защиты от статического электричества согласно инструкциям, действующим на предприятии и разработанным на основе ОСТ 92-1615-74.
9.1.5 Электрические проверки должны проводиться на аттестованных рабочих местах лицами, прошедшими аттестацию и изучившими правила эксплуатации используемых приборов, правила техники безопасности при работе с электрооборудованием.
9.1.6 По методике п.9.4 проверяются одновременно приемник и аппаратура электронная. Допускается в случае необходимости заменять одну из сборок технологической. В случае проведения входного контроля только приемников, проверки по п.п.9.4.9.- 9.4.13 (проверка работы блокировки) не проводить.
9.1.7 Допускается проведение проверок по п. 9.4 без перерывов на остывание пневмораспределителей отсеков рулевых приводов (ОРП). Через каждые 200 проверок следует проверять ОРП.
9.1.8 На импульсных источниках питания (типа Б5-46,Б5-48) выставить максимальный токВа стабилизации.
9.1.9 При проверках по п. 9.4 входы вольтметра должны быть отключены от заземления.
9.1.10Ва Контрольно-измерительная аппаратура должна быть проверена, а нестандартное оборудование тАУ аттестовано.
9.1.11 Перечень контрольно-измерительной аппаратуры, используемой при проверках электрических параметров, приведен в таблице 9.1.
Таблица 9.1
| Наименование | Класс точности, погрешность | Количество |
Источник питания типа 13РР-30-30 (ИП1-ИП4) Источник питания типа Б5-46(ИП5) Источник питания типа Б5-48(ИП6) Вольтметр электронный типа В7-16А | 4% 0,5% 0,5% В±(0,05+0,05Uк/Uх)% | 2 1 1 1 |
Примечание Указанная контрольно-измерительная аппаратура может быть заменена другой, обеспечивающей заданную точность и пределы измерений. | ||
9.1.12 Перечень нестандартного оборудования приведен в таблице 9.2.
Таблица 9.2
| Наименование | Количество |
Комплект контрольно-проверочной аппаратуры Пульт контроля Технологический отсек рулевого привода (ОРП) Контактное устройство (КУ) Кабель для подключения КУ (кабель №5) Технологический приемник Технологическая аппаратура электронная | 1 1 2 1 1 1 1 |
9.1.13 Сборочные единицы, прошедшие все проверки и соответствующие даннымВа требованиям, маркируются.
9.2 Подготовка рабочего места для проведения электрических проверок
9.2.1 Собрать рабочее место согласно функциональной схеме, приведенной в графической части.
9.2.2 Установить тумблер SA1 на пульте проверки в положение ВКЛ.
9.1.3 Установить на источниках питания ИП1 тАУ ИП4 напряжение от 11 до 13 В; на ИП5 тАУ от 5 до 5.5 В; на ИП6 тАУ от 49.5 до 50.5 В.
9.2.4 Включить источники питания.
9.2.5 Подготовить к работе пульт проверки КПА.
а) установить на входном зрачке приемника, мощность излучения (P0) в пределах (0.6-1.1)*10-6 Вт, приВа этомВа измерительВа мощности должен быть без объектива.
б) включить вольтметр, подготовить его к работе согласно техническому описанию на него.
в) установить технологическую аппаратуру электронную в контактное устройство (КУ) согласно методике установки аппаратуры электронной. Аппаратура с технологическим разъемом подключается к кабелю №5 без контактного устройства.
г) на пульте КПА нажать кнопку ВлЗАПУСКВ» и регулировкой выходного напряжения ИП1 и ИП2 установить между гнездами Вл0 В-ОСВ» и Вл-12 В-ОСВ» напряжение минус (12В±0.5) В, а между гнездами Вл0 В-ОСВ» и Вл+12В-ОСВ» напряжение (12В±0.5) В, нажать кнопку ВлСБРОСВ».
д) отсоединить технологическую сборку.
9.3 Методы проверок
9.3.1 Проверка комплектности сборочной единицы (приемника).
а) проверить целостность упаковки, наличие и сохранность пломб ОТК и ПЗ.
б) в комплект поставки должны входить:
- приемник;
- паспорт;
- упаковка.
в) проверить правильность оформления паспорта приемника.
9.3.2 Проверка внешнего вида маркировки и клеймения сборочной единицы (приемника).
а) извлечь приемник излучения (ПИ) из упаковки.
б) проверить наличие клейм ОТЗ и ПЗ на приемнике.
в) проверить маркировку; она должна содержать наименование ПИ, заводской номерВа и дату изготовления.
9.3.3Ва Проверка комплектности сборочной единицы (аппаратуры электронной).
а) проверить целостность упаковки, наличие и сохранность пломб ОТК и ПЗ.
б) в комплект поставки должны входить:
- аппаратура электронная;
- паспорт;
- упаковка.
Ва в) проверить правильность оформления паспорта аппаратуры.
9.3.4 Проверка внешнего вида, маркировки и клеймения сборочной единицы (аппаратуры электронной).
а) извлечь аппаратуру электронную (АЭ) из упаковки.
б) проверить наличие клейм ОТК и ПЗ на аппаратуре.
в) проверить маркировку; она должна содержать наименование АЭ, заводской номер и дату изготовления; место и способ нанесения должны соответствовать сборочному чертежу.
г) проверить внешний вид на соответствие сборочному чертежу.
9.4 Проверка электрических параметров приемника и аппаратуры электронной.
Проверки проводятся на подготовленном рабочем месте.
9.4.1 Подключить проверяемую АЭ к контактному устройству по методике установки аппаратуры электронной в контактное устройство.
МетодикаВа установки аппаратуры электронной в контактное устройство
- установить контактное устройство (КУ) на ровную горизонтальную поверхность;
- вывинтить 2 винта, удерживающих прижимную планку на КУ;
- снять прижимную планку;
- разместить аппаратуру электронную (АЭ) над отверстием в металлическом основании КУ, совместив выводы АЭ с контактными площадками КУ (первый вывод с первой контактной площадкой);
- установить прижимную планку с винтами над контактными площадками;
- прижать планку рукой и завинтить винты, не допуская перекоса планки;
9.4.2 Подключить проверяемый приемникВа к разъему ПИ пульта.
9.4.3 Установить тумблер SA1 на пультеВа в положение ВКЛ.
9.4.4 Установить тумблер SA2 на пульте в положение Вл1В».
9.4.5 Нажать кнопку ВлЗАПУСКВ» пульта КПА.
9.4.6 По окончании работы программы на пульте КПА должен гореть индикатор ВлНОРМАВ».
9.4.7 На пультеВа КПА нажать кнопку ВлСБРОСВ».
9.4.8 Установить тумблер SA1 на пульте в положение ВлВЫКЛВ».
Действия, совершаемые по п.п.9.4.9 -9.4.12, необходимо завершить в течение 35 с после нажатия кнопки ВлЗАПУСКВ» на пульте, т.к. питание на проверяемые сборки подается на 35 с; в случае необходимости повторного включения питания нажать кнопки ВлСБРОСВ» и ВлЗАПУСКВ».
9.4.9 На пульте КПА нажать кнопку ВлЗАПУСКВ» тАУ показания вольтметра должныВа быть от минус 0.01 до 0.01 В.
9.4.10 Нажать 6 раз кнопку SA3 на пульте, контролируя показания вольтметра после каждого нажатия тАУ они должны быть от минус 0.01 до 0.01 В до шестого нажатия, а после шестого должен загореться светодиод Вл-12 В МРВ».
9.4.11 Установить тумблер SA2 на пульте в положение Вл2В» - показания вольтметра должны быть от 0.3 до 1.1 В.
9.4.12Нажать еще 10 раз кнопку SA3 на пульте, контролируя показания вольтметра после каждого нажатия тАУ они должны быть от 0.3 до 1.1 В.
9.4.13 На пульте нажать кнопку ВлСБРОСВ».
9.4.14 Отсоединить приемник и АЭ.
Примечание тАУ По окончании каждой проверки по п. 9.4 автоматически происходит переключение между двумя, подключенными к пульту отсеками рулевого привода (ОРП).
9.5 Контрольно-проверочная аппаратура
Контрольно-проверочная аппаратура (КПА) предназначена для контроля специзделия 9М133 для работы при следующих условиях эксплуатации:
- температура окружающего воздуха от плюс 10 до плюс 35 В°С;
- относительная влажность воздуха при температуре плюс 25 В°С должн
Вместе с этим смотрят:
IP-телефония. Особенности цифровой офисной связи