Разработка светодиодной матрицы
Микропроцессоры и производные от них тАФ микроконтроллеры тАФ являются широко распространенным и при этом незаметным элементом инфраструктуры современного общества, основанного на электронике и коммуникациях. Исследования, проведенные в 2008 году, показали, что в каждом доме незаметно для нас ВлживетВ» около 100 микроконтроллеров и микропроцессоров.
Каждый год продается около четырех миллиардов подобных изделий, предназначенных для реализации ВлмозговВ» разнообразных ВлумныхВ» устройств, начиная от интеллектуальных таймеров для яйцеварок и заканчивая системами управления самолетом. Подавляющее же большинство продаж приходится на дешевые микроконтроллеры, встраиваемые в специализированные электронные устройства, такие как смарт-карты. Причем если основной задачей микропроцессоров является обеспечение собственно вычислительной мощности, то во втором случае акцент смещается в сторону объединения на одном кристалле центрального процессора, памяти и устройств ввода/вывода. Такая интегрированная вычислительная система называется микроконтроллером.
Светодиодные матрицы широко используются в промышленности. Светодиодные матрицы применяются в светофорах, устройствах бытового освещения и т.д. Высокие эксплуатационные параметры светодиодных матриц - оптическая мощность излучения, коэффициент преобразования электрической энергии в световую, высокая надежность и низкая себестоимость делают эти источники света весьма перспективными.
Тема дипломной работы ВлРазработка светодиодной матрицыВ», которая будет предметом исследования.
Цель дипломной работы тАУ разработать светодиодную матрицу для световых эффектов, которая будет управляться микроконтроллером.
Тема является актуальной, т.к. имеет широкое применение.
РАЗДЕЛ 1 ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАЗРАБОТКИ
1.1 Разработка микропроцессорной системы на основе микроконтроллера
1.1.1 Основные этапы разработки
Технология проектирования контроллеров на базе МК полностью соответствует принципу неразрывного проектирования и отладки аппаратных и программных средств, принятому в микропроцессорной технике. Это означает, что перед разработчиком такого рода МПС стоит задача реализации полного цикла проектирования, начиная от разработки алгоритма функционирования и заканчивая комплексными испытаниями в составе изделия, а, возможно, и сопровождением при производстве. Сложившаяся к настоящему времени методология проектирования контроллеров может быть представлена так, как показано на рис. 1.1.
В техническом задании формулируются требования к контроллеру с точки зрения реализации определенной функции управления. Техническое задание включает в себя набор требований, который определяет, что пользователь хочет от контроллера и что разрабатываемый прибор должен делать.
На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером для пользователя после завершения проектирования, уточняя тем самым, насколько устройство соответствует предъявляемым требованиям. Она включает в себя описания форматов данных, как на входе, так и на выходе, а также внешние условия, управляющие действиями контроллера.
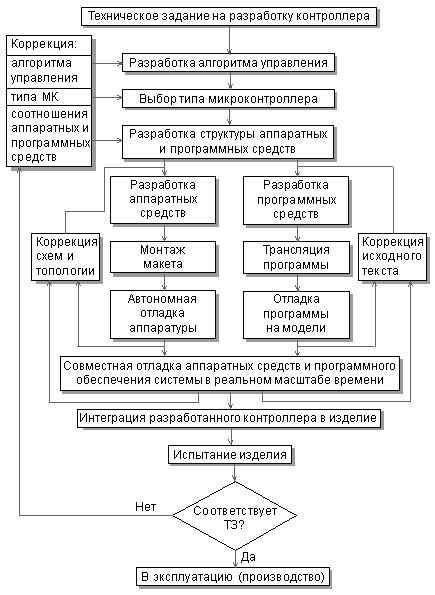
Рисунок 1.1- Основные этапы разработки контроллера
Этап разработки алгоритма управления является наиболее ответственным, поскольку ошибки данного этапа обычно обнаруживаются только при испытаниях законченного изделия и приводят к необходимости дорогостоящей переработки всего устройства.
При этом необходимо исходить из того, что максимальное использование аппаратных средств упрощает разработку и обеспечивает высокое быстродействие контроллера в целом, но сопровождается, как правило, увеличением стоимости и потребляемой мощности. Связано это с тем, что увеличение доли аппаратных средств достигается либо путем выбора более сложного МК, либо путем использования специализированных интерфейсных схем.
При выборе типа МК учитываются следующие основные характеристики:
- разрядность;
- быстродействие;
- набор команд и способов адресации;
- требования к источнику питания и потребляемая мощность в различных режимах;
- объем ПЗУ программ и ОЗУ данных;
- возможности расширения памяти программ и данных;
- возможность перепрограммирования в составе устройства;
- наличие и надежность средств защиты внутренней информации;
- стоимость в различных вариантах исполнения;
- наличие полной документации;
- наличие и доступность эффективных средств программирования и отладки МК;
-количество и доступность каналов поставки, возможность замены изделиями других фирм.
Список этот не является исчерпывающим, поскольку специфика проектируемого устройства может перенести акцент требований на другие параметры МК. Определяющими могут оказаться, например, требования к точности внутреннего компаратора напряжений или наличие большого числа выходных каналов ШИМ.
Номенклатура выпускаемых в настоящее время МК исчисляется тысячами типов изделий различных фирм. Современная стратегия модульного проектирования обеспечивает потребителя разнообразием моделей МК с одним и тем же процессорным ядром. Такое структурное разнообразие открывает перед разработчиком возможность выбора оптимального МК, не имеющего функциональной избыточности, что минимизирует стоимость комплектующих элементов.
Однако для реализации на практике возможности выбора оптимального МК необходима достаточно глубокая проработка алгоритма управления, оценка объема исполняемой программы и числа линий сопряжения с объектом на этапе выбора МК. Допущенные на данном этапе просчеты могут впоследствии привести к необходимости смены модели МК и повторной разводки печатной платы макета контроллера. В таких условиях целесообразно выполнять предварительное моделирование основных элементов прикладной программы с использованием программно-логической модели выбранного МК.
При отсутствии МК, обеспечивающего требуемые по ТЗ характеристики проектируемого контроллера, необходим возврат к этапу разработки алгоритма управления и пересмотр выбранного соотношения между объемом программного обеспечения и аппаратных средств. Отсутствие подходящего МК чаще всего означает, что для реализации необходимого объема вычислений (алгоритмов управления) за отведенное время нужна дополнительная аппаратная поддержка. Отрицательный результат поиска МК с требуемыми характеристиками может быть связан также с необходимостью обслуживания большого числа объектов управления. В этом случае возможно использование внешних схем обрамления МК.
На этапе разработки структуры контроллера окончательно определяется состав имеющихся и подлежащих разработке аппаратных модулей, протоколы обмена между модулями, типы разъемов. Выполняется предварительная проработка конструкции контроллера.
Возможность перераспределения функций между аппаратными и программными средствами на данном этапе существует, но она ограничена характеристиками уже выбранного МК. При этом необходимо иметь в виду, что современные МК выпускаются, как правило, сериями (семействами) контроллеров, совместимых программно и конструктивно, но различающихся по своим возможностям (объем памяти, набор периферийных устройств и т.д.). Это дает возможность выбора структуры контроллера с целью поиска наиболее оптимального варианта реализации.
1.1.2 Разработка и отладка аппаратных средств
После разработки структуры аппаратных и программных средств дальнейшая работа над контроллером может быть распараллелена. Разработка аппаратных средств включает в себя разработку общей принципиальной схемы, разводку топологии плат, монтаж макета и его автономную отладку. Время выполнения этих этапов зависит от имеющегося набора апробированных функционально-топологических модулей, опыта и квалификации разработчика. На этапе ввода принципиальной схемы и разработки топологии используются, как правило, распространенные системы проектирования типа "ACCEL EDA" или "OrCad".
Автономная отладка аппаратуры на основе МК с открытой архитектурой предполагает контроль состояния многоразрядных магистралей адреса и данных с целью проверки правильности обращения к внешним ресурсам памяти и периферийным устройствам. Закрытая архитектура МК предполагает реализацию большинства функций разрабатываемого устройства внутренними средствами микроконтроллера. Поэтому разрабатываемый контроллер будет иметь малое число периферийных ИС, а обмен с ними будет идти преимущественно по последовательным интерфейсам. Здесь на первый план выйдут вопросы согласования по нагрузочной способности параллельных портов МК и отладка алгоритмов обмена по последовательным каналам.
1.1.3 Разработка и отладка программного обеспечения
Содержание этапов разработки программного обеспечения, его трансляции и отладки на моделях существенно зависит от используемых системных средств. В настоящее время ресурсы 8-разрядных МК достаточны для поддержки программирования на языках высокого уровня. Это позволяет использовать все преимущества структурного программирования, разрабатывать программное обеспечение с использованием раздельно транслируемых модулей. Одновременно продолжают широко использоваться языки низкого уровня типа ассемблера, особенно при необходимости обеспечения контролируемых интервалов времени. Задачи предварительной обработки данных часто требуют использования вычислений с плавающей точкой, трансцендентных функций.
В настоящее время самым мощным средством разработки программного обеспечения для МК являются интегрированные среды разработки, имеющие в своем составе менеджер проектов, текстовый редактор и симулятор, а также допускающие подключение компиляторов языков высокого уровня типа Паскаль или Си. При этом необходимо иметь в виду, что архитектура многих 8-разрядных МК вследствие малого количества ресурсов, страничного распределения памяти, неудобной индексной адресации и некоторых других архитектурных ограничений не обеспечивает компилятору возможности генерировать эффективный код. Для обхода этих ограничений разработчики ряда компиляторов вынуждены были перекладывать на пользователя заботу об оптимизации кода программы.
Для проверки и отладки программного обеспечения используются так называемые программные симуляторы, предоставляющие пользователю возможность выполнять разработанную программу на программно-логической модели МК.
Загрузив программу в симулятор, пользователь имеет возможность запускать ее в пошаговом или непрерывном режимах, задавать условные или безусловные точки останова, контролировать и свободно модифицировать содержимое ячеек памяти и регистров симулируемого МК.
1.1.4 Методы и средства совместной отладки аппаратных и программных средств
Этап совместной отладки аппаратных и программных средств в реальном масштабе времени является самым трудоемким и требует использования инструментальных средств отладки. К числу основных инструментальных средств отладки относятся:
- внутрисхемные эмуляторы;
- платы развития (оценочные платы);
- мониторы отладки;
- эмуляторы ПЗУ.
Эмулятор ПЗУ тАУ программно-аппаратное средство, позволяющее замещать ПЗУ на отлаживаемой плате, и подставляющее вместо него ОЗУ, в которое может быть загружена программа с компьютера через один из стандартных каналов связи. Это устройство позволяет пользователю избежать многократных циклов перепрограммирования ПЗУ. Эмулятор ПЗУ нужен только для МК, которые могут обращаться к внешней памяти программ. Это устройство сравнимо по сложности и по стоимости с платами развития и имеет одно большое достоинство: универсальность. Эмулятор ПЗУ может работать с любыми типами МК.
Эмулируемая память доступна для просмотра и модификации, но контроль над внутренними управляющими регистрами МК был до недавнего времени невозможен.
В последнее время появились модели интеллектуальных эмуляторов ПЗУ, которые позволяют "заглядывать" внутрь МК на плате пользователя.
Этап совместной отладки аппаратных и программных средств в реальном масштабе времени завершается, когда аппаратура и программное обеспечение совместно обеспечивают выполнение всех шагов алгоритма работы системы. В конце этапа отлаженная программа заносится с помощью программатора в энергонезависимую память МК, и проверяется работа контроллера без эмулятора.
1.2 Светодиодные матрицы
Еще в 1907 году было впервые отмечено слабое свечение, испускаемое карбидокремниевыми кристаллами вследствие неизвестных тогда электронных превращений. В 1923 году наш соотечественник О.В.Лосев отмечал это явление во время проводимых им радиотехнических исследований с полупроводниковыми детекторами, однако интенсивность наблюдаемых излучений была столь незначительной, что научная общественность до поры до времени всерьез не интересовалась этим феноменом. Только в 1962 году группа инженеров под руководством Генри Холоньяка из General Electric продемонстрировала работу первого светодиода, а спустя шесть лет красные светодиоды появились на рынке.
Светодиод тАУ это полупроводниковый прибор с p-n переходом, который излучает фотоны при прямом смещении. Эффект излучения света называется инжектированной электролюминесценцией и происходит, когда неосновные носители заряда рекобинируют с носителями противоположного типа в запрещенной зоне. Длина волны излучаемого света определяется в основном выбором используемых полупроводниковых материалов.
Не все инжектированные неосновные носители рекомбинируют с излучением кванта света даже в идеальном p-n переходе. Безизлучательная рекомбинация, вызванная дефектами и дислокациями в полупроводнике, может дать увеличение разброса в полезной эмиссии в практически идентичных светодиодах. На практике это означает то, что выпущенная партия светодиодов сортируется и разделяется по группам в зависимости от интенсивности излучения и других параметров. Светодиодные чипы выращиваются подобно кремниевым интегральным микросхемам и разрезаются на кристаллы. Размер кристалла для светодиодов лежит в диапазоне от 0,18 до 1мм (рис. 1.2).
Базовая структура светодиодного индикатора состоит из полупроводникового кристалла, рамки с внешними выводами, на которой размещен кристалл, и герметизирующей эпоксидной смолы, которая окружает и защищает кристалл, а также рассеивает свет (формирует диаграмму направленности) (рис. 1.3). Кристалл приклеивается токопроводящей эпоксидной смолой ко дну рамки ,называемой лункой. Лунка является первичной оптической системой для кристалла и согласует распределение светового потока от его граней, с последующим преломлением линзы из эпоксидной смолы. Верхний контакт кристалла соединен проводом с другим выводом рамки.

Рисунок 1.2 - Типичный кристалл AlInGaP
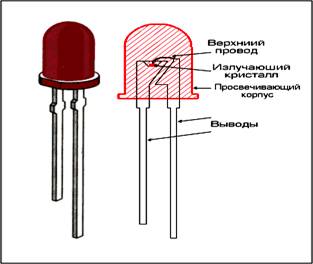
Рисунок 1.3 - Типичный светодиод и его конструкция в разрезе
Механическая конструкция светодиода определяет распределение света и диаграмму направленности излучения в пространстве. Узкая диаграмма направленности (рис. 1.4) обеспечивает большую силу света в осевом направлении, но небольшой угол обзора. Тот же кристалл может быть смонтирован так, чтобы получить широкий угол обзора, но интенсивность в осевом направлении будет ниже пропорционально углу излучения. Сверхяркие светодиоды с углом обзора от 15В° до 30В° по уровню 0,5 применяются для информационных панелей, расположенных прямо перед наблюдателем, а светодиоды с широким углом обзора применяются в индикаторах для широкого обзора или приборных досках.ВаВаВаВаВаВаВа

Рисунок 1.4 - Светодиодный индикатор с узкой диаграммой направленности
Известный 7-сегментный цифровой индикатор в действительности является 8-сегментным индикатором, так как включает в себя десятичную точку. Менее известные ВлзвездочныеВ» алфавитно-цифровые индикаторы таким же образом обозначаются, как 14-сегментные и 16-сегментые индикаторы, вновь не учитывая десятичную точку. Эти индикаторы обеспечивают экономичное решение для отображения 26 букв латинского алфавита в верхнем регистре, а также цифр от 0 до 9. Разница между 14-сегментными и 16-сегментными индикаторами лишь в том, что у 16-сегментного индикатора верхний и нижний сегмент разбиты на два, улучшая внешний вид некоторых букв (Рис. 1.5).
Светодиодная матрица 5х7 является еще более универсальной, позволяя отображать латинский алфавит в верхнем и нижнем регистре, а также множество символов. Различие в качестве отображения показано на рис. 7, где сравниваются символы, отображаемые матрицей 5х7 и 16-сегментным индикатором.
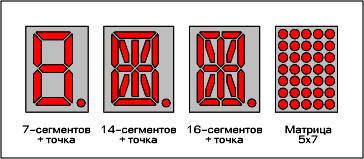
Рисунок 1.5 - Светодиодные 7-ми, 14-ти и 16-сегментные индикаторы и светодиодная матрица 5х7
Светодиодная матрица 5х7 является еще более универсальной, позволяя отображать латинский алфавит в верхнем и нижнем регистре, а также множество символов. Различие в качестве отображения показано на рис. 1.6, где сравниваются символы, отображаемые матрицей 5х7 и 16-сегментным индикатором.
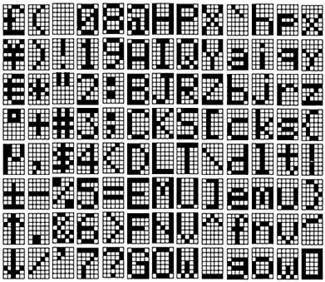
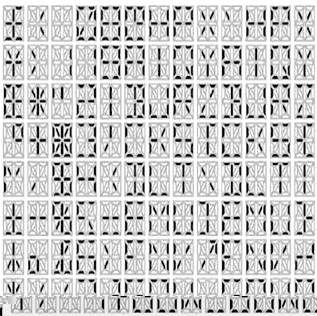
Рисунок 1.6 - Сравнение матрицы 5 x 7 и "звездочного" индикатора
Большинство светодиодных цифровых и буквенно-цифровых индикаторов в действительности являются гибридными, объединяя множество светодиодных индикаторов в одном корпусе. Некоторые очень маленькие цифровые дисплеи являются действительно монолитными (например калькуляторы с очень маленькими цифрами и линзочкой, которые были популярными в 70-х). В любом из двух случаев, контур каждого сегмента формируется рефлектором и световой трубкой, а не самим светодиодным кристаллом. Небольшие дисплеи используют один кристалл на сегмент, в то время как большие дисплеи используют 2 или более кристаллов на сегмент, эффективно излучая свет и обеспечивая приемлемую однородность яркости по всему сегменту.
В процессе производства, кристаллы монтируются либо на рамку, либо на печатную плату и соединяются проводами с внешними выводами. Кристаллы монтируются с применением токопроводящей пасты, так как подложка является одним из двух выводов диода (рис. 1.7). Внутренняя разводка индикаторов обычно объединяет либо катоды, либо аноды кристаллов вместе, уменьшая число внешних выводов. В результате индикаторы подразделяются на индикаторы с общим анодом и индикаторы с общим катодом (рис. 1.8)
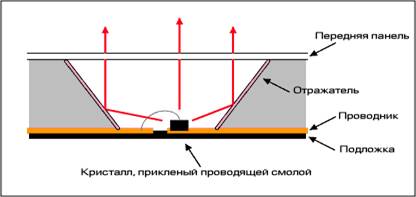
Рисунок 1.7 - Установка кристалла для формирования сегмента
Метод монтажа кристаллов на рамке подобен тому, который используется при производстве интегральных схем. Рамка выполнена из посеребренной стали, обеспечивая хороший теплоотвод и светоотражение. Рефлекторный канал, формирующий световую трубку для каждого сегмента, заполнен эпоксидной смолой, обеспечивая механическую прочность и защиту от окружающей среды.
Более дешевый метод использует печатную подложку вместо рамки. Индикаторы, выполненные по такому методу, используются обычно для производства многоразрядных дисплеев, например для часов. При использовании этого метода, индикатор не заполняется эпоксидной смолой, что уменьшает стоимость, но приводит к деградации, вызванной загрязнением.

Рисунок 1.8 - Светодиодные цифровые индикаторы с общим анодом и с общим катодом
Электрические характеристики светодиодов подобны другим полупроводниковым диодам. Прямое напряжение светодиодов различно для различных структур p-n переходов, используемых для получения излучения разных цветов (рис. 1.9). Прямое напряжение светодиода обратно пропорционально росту температуры окружающей среды. Подобно всем полупроводниковым приборам, номинальные характеристики светодиодов должны быть снижены при высоких рабочих температурах.
Оптические характеристики светодиода также сильно зависят от температуры. Во-первых, световой поток, излучаемый светодиодом, падает при повышении температуры p-n перехода. Это происходит из-за возрастания вероятности безизлучательной рекомбинации дырок и электронов, которая не вносит вклада в излучение света. Кроме того, длина волны излучаемого света также изменяется с температурой, в основном из-за изменения ширины запрещенной зоны.
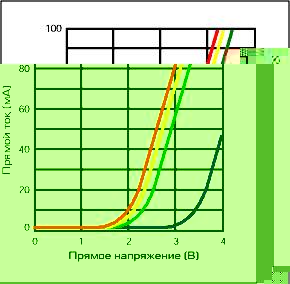
Рис. 1.9 - Изменение прямого напряжения светодиода от тока и излучаемого цвета
Драйверы светодиодных индикаторов тАУ статические и мультиплексные.
Самый простой способ управления светодиодами сегментов индикатора тАУ управлять каждым светодиодом, используя отдельный резистор или управляя прямым током. Эта техника управления называется статической, так как ток, протекающий через светодиод, непрерывен. Статическое управление применяется в основном для небольшого числа светодиодов, например для 2-х 7-сегментных цифр. Высокоэкономичные светодиоды могут управляться током в 2 мА, который может быть взят с выходных портов микроконтроллеров.
Если необходимо управлять множеством сегментов, статическое управление становится неэкономичным тАУ 1 драйвер на 1 светодиод. Мультиплексное или импульсное управление снижает число управляющих соединений, используя стробирование небольшого числа сегментов (обычно одну цифру). Стробирование происходит с большой частотой, так что человеческий глаз воспринимает изображение как непрерывное. Однако при этом методе управления светодиодам требуется больший ток для компенсации рабочего цикла (сохранения яркости).
Преимуществом импульсного управления является то, что человеческий глаз ведет себя, отчасти, как интегрирующий фотометр, а отчасти как пиковый фотометр. В результате человеческий глаз воспринимает быстро пульсирующий свет где-то между пиком и средним значением яркости.
Эффективность светодиода обычно возрастает при увеличении прямого тока, при условии постоянной температуры PN перехода. Но это не всегда так и характеристики светодиода должны быть тщательно изучены (и сравнены) при выборе оптимального пикового тока (рис. 1.10).
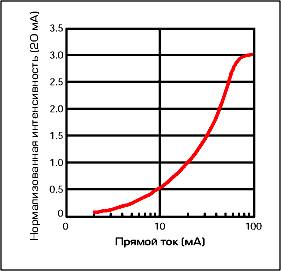
Рисунок 1.10 - Зависимость светового выхода от прямого тока
В стандартном варианте, в режиме мультиплексирования используется отдельный вывод общих катодов для каждой цифры, в то время как все аноды объединены для всех цифр. Число требуемых выводов может быть подсчитано как, 1 тАУ для каждой цифры, плюс 1 - для каждого сегмента цифры. Более экономичная схема использования выводов в режиме мультиплексирования основана на том, что используется только один вывод. Поскольку на вывод светодиода попеременно подается сигнал то от цифры, то от сегмента, то n выходов может использоваться для управления n цифрами и n-1 сегментами. Такой подход задан в светодиодном драйвере Maxim MAX6951 для управления 8-ю цифрами на всего 9-ти ножках.
РАЗДЕЛ 2 РАЗРАБОТКА СВЕТОДИОДНОЙ МАТРИЦЫ
2.1 Постановка задачи
Требуется разработать светодиодную матрицу, которая будет использоваться в праздничные и торжественные дни, на дискотеках, создавая различные световые эффекты.
Разработка устройства будет производиться с учётом следующих требований:
- простота схемы (минимальное количество компонентов);
- устойчивость к изменениям напряжения, долговечность;
- многообразие световых эффектов;
- низкое энергопотребление.
2.2 Разработка структурной схемы устройства и функциональной спецификации
Разработаем структурную схему светодиодной матрицы для создания световых эффектов (Рисунок 2.1).
Функциональная спецификация светодиодной матрицы:
1.Входы:
Электропитание МК (ИП).
2.Выходы:
Управление светодиодной матрицей 5х5 (D1-D25).
3.Функции:
При включении питания МК по заранее запрограммированной программе последний включает набор светодиодов светодиодной матрицы 5х5, создавая различные эффекты.

Рисунок 2.1 тАУ Структурная схема светодиодной матрицы
Структурная схема имеет следующие условные обозначения:
- ИП тАУ источник питания;
- МК тАУ микроконтроллер;
- СМ 5х5 тАУ светодиодная матрица 5х5.
Для проектирования выберем микроконтроллеры серии PIC16F628A. Выбор связан простотой программирования, относительной дешевизной, надежностью, малым током потребления и рядом других признаков о которых будет сказано ниже и в Приложении А.
2.3 Аппаратные средства микроконтроллеров серии PIC16F628А
PIC16F628A - Основные характеристики
Характеристика RISC ядра:
Тактовая частота от DC до 20МГц
Поддержка прерываний 8-уровневый аппаратный стек
Прямая, косвенная и относительная адресация 35 однословных команд
- все команды выполняются за один машинный цикл, кроме команд ветвления и условия с истинным результатом
Особенности микроконтроллеров:
Внешний и внутренний режимы тактового генератора
- Прецизионный внутренний генератор 4МГц, нестабильность +/- 1%
- Энергосберегающий внутренний генератор 37кГц
- Режим внешнего генератора для подключения кварцевого или керамического резонатора
Режим энергосбережения SLEEP
Программируемые подтягивающие резисторы на входах PORTB
Сторожевой таймер WDT с отдельным генератором
Режим низковольтного программирования
Программирование на плате через последовательный порт (ICSP) (с использованием двух выводов)
Защита кода программы
Сброс по снижению напряжения питания BOR
Сброс по включению питания POR
Таймер включения питания PWRT и таймер запуска генератора OST
Широкий диапазон напряжения питания от 2.0В до 5.5В
Промышленный и расширенный температурный диапазон
Высокая выносливость ячеек FLASH/EEPROM
- 100 000 циклов стирания /записи FLASH памяти программ
- 1 000 000 циклов стирания /записи EEPROM памяти данных
- Период хранения данных FLASH/EEPROM памяти > 100 лет
Характеристики пониженного энергопотребления:
Режим энергосбережения:
- 100нА @ 2.0В (тип.)
Режимы работы:
- 12мкА @ 32кГц, 2.0В (тип.)
- 120мкА @ 1МГц, 2.0В (тип.)
Генератор таймера TMR1:
- 1.2мкА, 32кГц, 2.0В (тип.)
Сторожевой таймер:
- 1мкА @ 2.0В (тип.)
Двухскоростной внутренний генератор:
- Выбор скорости старта 4МГц или 37кГц
- Время выхода из SLEEP режима 3мкс @ 3.0В (тип.)
Периферия:
16 каналов ввода/вывода с индивидуальными битами направления
Сильноточные схемы портов сток/исток, допускающих непосредственное подключение светодиодов
Модуль аналоговых компараторов:
- Два аналоговых компаратора
- Внутренний программируемый источник опорного напряжения
- Внутренний или внешний источник опорного напряжения
- Выходы компараторов могут быть подключены на выводы микроконтроллера
TMR0: 8-разрядный таймер/счетчик с программируемым предделителем
TMR1: 16-разрядный таймер/счетчик с внешним генератором
TMR2: 8-разрядный таймер/счетчик с программируемым предделителем и постделителем
CCP модуль:
- разрешение захвата 16 бит
- разрешение сравнения 16 бит
- 10-разрядный ШИМ
Адресуемый USART модуль
Таблица 2.1 тАУ Сравнительная характеристика микроконтроллеров PIC16F