Розрахунок трьохфазного мостового випрямляча
Нацiональний технiчний унiверситет Украiни
"Киiвський полiтехнiчний iнститут"
Курсова робота
з курсу: "Електроннi системи керування та регулювання"
на тему: "Розрахунок трьохфазного мостового випрямляча"
Киiв 2008
Змiст
Вступ
1.Теоретичнi вiдомостi про роботу пристрою
1.1 Силова частина. Трифазна вентильна схема (схема Ларiонова)
1.2 Система керування
2. Розрахунок силовоi частини
3. Розрахунок системи керування
4. Моделювання перехiдного процесу
5. Дослiдження стiйкостi
6. Висновки
7.Лiтература
Додатки
Вступ
Схеми випрямлячiв трифазного живлення застосовуються в основному для живлення споживачiв середньоi й великоi потужностi. Первинна обмотка трансформаторiв таких випрямлячiв складаiться iз трьох фаз i з'iднуiться або в зiрку, або в трикутник. Вториннi обмотки трансформатора (iх може бути трохи) також трифазнi. За допомогою спецiальних схем з'iднання вторинних обмоток i всього випрямляча можна одержати випрямлення напруга iз числом пульсацiй за перiод ![]() , кратним шести. Зi збiльшенням числа пульсацiй у випрямленiй напрузi значно скорочуються габаритнi розмiри електричних фiльтрiв, що згладжують, або взагалi вiдпадаi необхiднiсть у них.
, кратним шести. Зi збiльшенням числа пульсацiй у випрямленiй напрузi значно скорочуються габаритнi розмiри електричних фiльтрiв, що згладжують, або взагалi вiдпадаi необхiднiсть у них.
Випрямлячi трифазного живлення рiвномiрно навантажують мережа трифазного струму й вiдрiзняються високим коефiцiiнтом використання трансформатора.
Схеми випрямлячiв трифазного живлення використовуються для живлення статичних навантажень активного й активно-iндуктивного характеру, статичних навантажень iз проти-ерс., а також динамiчних навантажень у виглядi електродвигунiв постiйного струму. Останнiй вид навантаження варто розглядати як проти-ерс. з iндуктивнiстю.
Проектування схем вентильних перетворювачiв i одним з важливих напрямкiв у силовий перетворювальноi схемотехнiцi.
Основа проектування сучасних силових перетворювачiв - методи розрахунку процесiв у силових ланцюгах з вентилями, якi по своiй математичнiй моделi i зручними для аналiзу й синтезу перетворювальних схем.
1. Теоретичнi вiдомостi про роботу пристрою
1.1 Силова частина
Трифазна вентильна схема (схема Ларiонова).
Вентилi 1,3,5 утворять катодну, а вентилi 2,4,6 - анодну групи (рис.1.1.). З катодноi групи струм пропускаi той вентиль, до анода якого пiдводить бiльша позитивна напруга.
Нумерацiя вентилiв у данiй схемi вiдповiдаi порядку iхнього вступу в роботу за умови дотримання фазировки трансформатора (рис.1.1.).
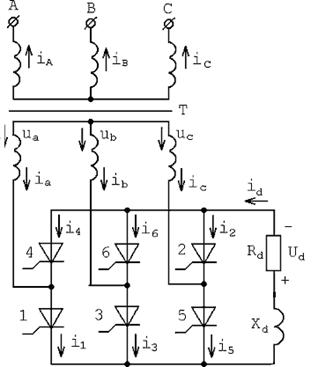
Рис.1.1. Схема Ларiонова
У будь-якому промiжку часу повиннi бути включенi два вентилi тАУ один з катодноi, а iншоi з анодноi групи. Почергова робота рiзних пар вентилiв у схемi приводить до появи на опорi Rd випрямленоi напруги, що складаi iз частин лiнiйних напруг вторинних обмоток трансформатора (вiсь 2 на рис.1.2) [1, 2].
З рис.1.2 (осi 1 i 2) видно, що моменти комутацii збiгаються з моментами проходження через нуль лiнiйних напруг (коли рiвнi двi фазних напруги).
У промiжку ( 0-01) найбiльше позитивне значення маi напруга ua, подаване до анода вентиля 1, а найбiльше негативне значення тАУ напруга ub, що пiдводиться до катода вентиля 6. Отже, у цьому промiжку одночасно включенi вентилi 1 i 6. Через вентиль 1 позитивна напруга ua пiдводить до нижнього затискача, а через вентиль 6 негативна напруга ub пiдводить до верхнього затискача опору Rd. Тому випрямлене напруга ud = ua- ub
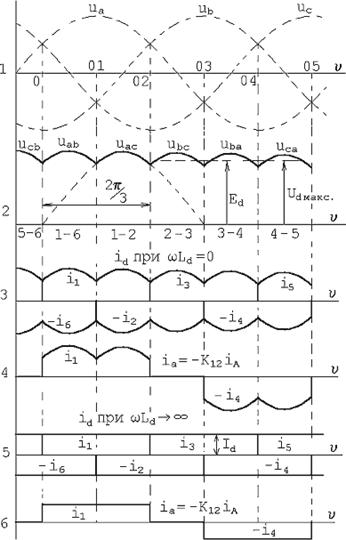
Рис.1.2. Кривi струмiв i напруги при α=0.
У точцi 01 напруга ub= uc , тому з анодноi групи включаiться вентиль 2. Тому що правiше крапки 01 напруга uc маi найбiльше негативне значення, вентиль 6 вимикаiться. У промiжку ( 01-02) одночасно включенi вентилi 1 i 2 i випрямлена напруга:
ud = ua- uc.
Очевидно, що амплiтуда випрямленоi напруги:
![]()
До кожного закритого вентиля прикладене лiнiйна напруга, тому амплiтуда зворотноi напруги
![]()
Число пульсацiй випрямленоi напруги m=6.
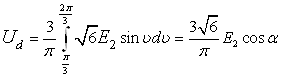
Постiйна складова випрямленоi напруги (середнi значення) обчислюiться для iнтервалу повторюваностi випрямленоi напруги, рiвного ![]() :
:
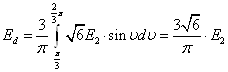 Ва. (1)
Ва. (1)
де Е2 тАУ дiюче значення фазноi напруги вторинних обмоток трансформатора.
Дiюче значення струму вторинноi обмотки (вiсь 6):
![]() Ва. (2)
Ва. (2)
Дiюче значення струму первинноi обмотки:
![]() Ва. (3)
Ва. (3)
Максимальне значення струму вентиля:
![]() Ва. (4)
Ва. (4)
Середнi значення струму вентиля:
![]() Ва. (5)
Ва. (5)
Дiюче значення струму вентиля:
![]() . (6)
. (6)
Нехай кут керування ![]() . У трифазнiй мостовiй схемi на керованих вентилях iмпульси, що вiдмикають, надходять iз затримкою на кут , щодо нулiв лiнiйних напруг або моментiв перетинання синусоiд фазних напруг (рис.1.3).
. У трифазнiй мостовiй схемi на керованих вентилях iмпульси, що вiдмикають, надходять iз затримкою на кут , щодо нулiв лiнiйних напруг або моментiв перетинання синусоiд фазних напруг (рис.1.3).
У результатi затримки моментiв комутацii тиристорiв на кут α середнi значення випрямленоi напруги, утвореного з вiдповiдних частин лiнiйних напруг, знижуiться доти, поки крива миттiвих значень випрямленоi напруги ud залишаiться вище нуля, що вiдповiдаi дiапазону змiни кута керування ![]() , випрямлений струм id буде безперервним поза залежнiстю вiд характеру навантаження. Тому при кутах
, випрямлений струм id буде безперервним поза залежнiстю вiд характеру навантаження. Тому при кутах ![]() Васереднi значення випрямленоi напруги для активного й активно-iндуктивного навантаження буде дорiвнюi
Васереднi значення випрямленоi напруги для активного й активно-iндуктивного навантаження буде дорiвнюi
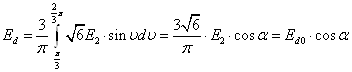 . (7)
. (7)
При кутах ![]() Ваi активному навантаженнi в напрузi ud i струмi id з'являються iнтервали з нульовим значенням (рис.1.4.), тобто наступаi режим роботи з переривчастим випрямлений струмом.
Ваi активному навантаженнi в напрузi ud i струмi id з'являються iнтервали з нульовим значенням (рис.1.4.), тобто наступаi режим роботи з переривчастим випрямлений струмом.
Середнi значення випрямленоi напруги для цього випадку може бути виражене в такий спосiб:
 ,(8)
,(8)
де
![]()
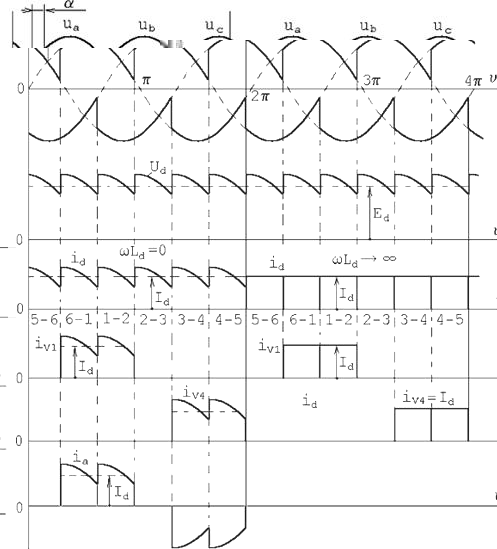
Рис.1.3. Дiаграми струмiв i напруг при кутах ![]() .
.
У режимi з переривчастим струмом id для забезпечення роботи даноi схеми, а також для ii первiсного запуску на вентилi схеми варто подавати здвоiнi iмпульси, що вiдмикають, з ![]() Ваiнтервалом або одиночнi, але iз тривалiстю, бiльшоi,
Ваiнтервалом або одиночнi, але iз тривалiстю, бiльшоi, ![]() нiж . Це пояснюiться тим, що для утворення замкнутого ланцюга протiкання струму id необхiдно забезпечити одночасне включення вентиля анодноi групи й вентиля катодноi групи.
нiж . Це пояснюiться тим, що для утворення замкнутого ланцюга протiкання струму id необхiдно забезпечити одночасне включення вентиля анодноi групи й вентиля катодноi групи.
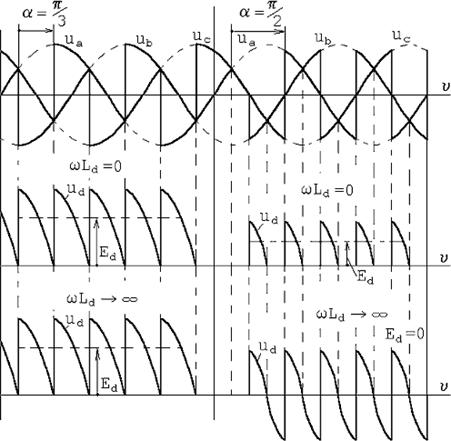
Рис.1.4. Дiаграми напруг при кутах ![]() Ваi
Ваi ![]()
При змiнi кута ![]() Вавiд 0 до
Вавiд 0 до ![]() Варегулювальна характеристика для активного й активно-iндуктивного навантаження описуiться формулою:
Варегулювальна характеристика для активного й активно-iндуктивного навантаження описуiться формулою:
![]()
При активно-iндуктивному навантаженнi й кутах ![]() , якщо
, якщо ![]() Ваабо вiдношення
Ваабо вiдношення ![]() Ватаке, що забезпечуiться режим безперервного струму id, середнi значення випрямленоi напруги також визначаiться по формулi:
Ватаке, що забезпечуiться режим безперервного струму id, середнi значення випрямленоi напруги також визначаiться по формулi:
![]()
При ![]() Васереднi значення
Васереднi значення ![]() Вастаi рiвним нулю, виходить, це вiдповiдаi рiвностi площ позитивноi й негативноi дiлянок кривiй випрямленоi напруги, що свiдчить про вiдсутнiсть у ньому постiйноi складовоi (крива 2 на рис.1.5).
Вастаi рiвним нулю, виходить, це вiдповiдаi рiвностi площ позитивноi й негативноi дiлянок кривiй випрямленоi напруги, що свiдчить про вiдсутнiсть у ньому постiйноi складовоi (крива 2 на рис.1.5).
Починаючи з кута ![]() Вапри активному навантаженнi регулювальна характеристика описуiться формулою (крива 1 на рис.2.5):
Вапри активному навантаженнi регулювальна характеристика описуiться формулою (крива 1 на рис.2.5):
![]()
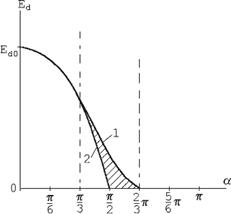
Рис.1.5. Регулювальнi характеристики: 1 - при активному навантаженнi; 2 - при активно-iндуктивному навантаженнi.
Заштрихована область на рис.1.5 вiдповiдаi сiмейству регулювальних характеристик у режимi з переривчастим струмом id при рiзних значеннях ![]() .
.
Приймемо iндуктивнiсть Ld настiльки великий, що струм навантаження id до моменту вiдмикання наступного вентиля не встигаi пройти через нуль. Коли струм через нуль не проходить, вiн наростаi вiд iнтервалу до iнтервалу й установлюiться протягом ряду перiодiв (звичайно трьох, чотирьох).
У трифазнiй мостовiй схемi до навантаження R-L пiдключена напруга:
![]()
де ![]() , а кут природного включення вентилiв при
, а кут природного включення вентилiв при ![]() Вастановить
Вастановить ![]() .
.
Струм через навантаження визначаiться диференцiальним рiвнянням
![]() Ва(9)
Ва(9)
Загальний iнтеграл рiшення рiвняння (9)
 Ва(10)
Ва(10)
де ![]() - кут навантаження;
- кут навантаження; ![]() - постiйна часу ланцюга навантаження;
- постiйна часу ланцюга навантаження; ![]() тАУ постiйна iнтегрування, обумовлене в кожному конкретному випадку з початкових умов.
тАУ постiйна iнтегрування, обумовлене в кожному конкретному випадку з початкових умов.
Для визначення струму в будь-якому iнтервалi часу зручно скористатися рiзницевими рiвняннями.
У загальному випадку до навантаження R-L може бути пiдключена напруга iз противо ЕДС
![]()
де E0 тАУ противо-ерс, наприклад, акумуляторна батарея або якiр двигуна постiйного струму. При впливi противо-едс можна одержати режим переривчастих струмiв, де рiвняння (9) i (10) недiйснi.
1.2 Система керування
Система керування (СУ) випрямляча призначена для формування керуючих iмпульсiв необхiдноi амплiтуди й тривалостi; для твердоi синхронiзацii iх з напiвперiодами фазних напруг; для розподiлу керуючих iмпульсiв по трьох каналах, вiдповiдно до числа фаз випрямляча; для стабiлiзацii вихiдноi напруги шляхом автоматичноi змiни кута керування α при впливi дестабiлiзуючих факторiв.
Принципова схема, шестиканальноi системи керування, у якiй реалiзований метод ШРЖМ-1, наведена на рис.1.6. Схема побудована при використаннi операцiйних пiдсилювачiв загального призначення.
Синусоiдальна напруга фази А, що знiмаiться c додатковоi (синхронiзуючоi) обмотки силового трансформатора TV1,надходить на вхiд синхронiзатора, зiбраного за схемою симетричного двостороннього обмежника напруги на дiодах VD1, VD2.Через нелiнiйнiсть вольтамперных характеристик дiодiв на виходi синхронiзатора формуiться трапецеiдальна напруга з амплiтудою Uогр, рiвноi спаданню напруги на вiдкритому дiодi й тривалiстю фронту ωtф . Прямий струм через дiоди обмежуiться резисторами R1, R2.
З виходу обмежника трапецеiдальний сигнал надходить на вхiд операцiйного пiдсилювача DA1 з метою збiльшення крутостi фронтiв i наданнi напрузi прямокутноi форми з амплiтудою Uп .
Дана напруга призначена керування польовим транзистором VТ1. Для того щоб час вiдкритого стану транзистора було багато менше перiоду СУ включаi RC- ланцюжок, що складаiться з C1i R3.
Пiд час вiдкритого стану транзистора VТ1 вiдбуваiться заряджання конденсатора С2до вихiдноi напруги пiдсилювача зворотного зв'язка (ПЗЗ), зiбраного на мiкросхемi DA4.
Розряджаiться конденсатор постiйним струмом. Джерело струму складаiться з ОУ DA2, резисторiв R4, R5, R6 i транзистора VТ2.
Напруга конденсатора С2 надходить на вхiд, що iнвертуi, компаратора DA3 i рiвняiться з порiвняльним значенням. Доти поки на конденсаторi буде напруга на виходi компаратора буде 0. Дана напруга вiдображаi кут регулювання.
Позитивний iмпульс вихiдноi напруги компаратора через обмежуючий резистор R7 надходить у ланцюг бази транзистора VТ3, що виконуi функцiю вихiдного пiдсилювача потужностi. При вiдмиканнi транзистора в його колекторному ланцюзi протiкаi iмпульс керуючого струму з амплiтудою Iу0, пiд дiiю якого свiтлодiод оптрона випромiнюi свiтловий iмпульс i переводить силовий тиристор фази А у включений стан. Для обмеження амплiтуди керуючого струмi включаiться резистор R9. В iнтервалi часу, коли вихiдна напруга компаратора негативно, транзистор VT3 закритий.
Стабiлiзацiя вихiдноi напруги здiйснюiться ланцюгом зворотного зв'язка, що складаi з вимiрювального елемента, джерела опорного (еталонного) напружена й пiдсилювача зворотного зв'язка. Функцiю вимiрювального елемента в схемi виконуi дiльник напруги R14, R15, R16, пiдключений до вихiдних клем випрямляча. Частина вихiдноi напруги, що знiмаiться з нижнього плеча дiльника, рiвняiться з еталонною напругою опорного стабiлiтрона VD3 .
Необхiдний струм стабiлiзацii встановлюiться резистором R17. Рiзниця мiж вихiдною й еталонною напругою пiдсилюiться пiдсилювачем зворотного зв'язка (мiкросхема DA4) надходить через транзистор VТ1 на конденсатор С2, а також на входи компараторiв каналiв формування iмпульсiв фаз B i С.
Необхiдний коефiцiiнт пiдсилення ПЗЗ установлюiться резисторами R11, R12. При змiнi напруги на навантаженнi пiд дiiю дестабiлiзуючих факторiв, наприклад при його збiльшеннi, напруга на не входi, що iнвертуi, ПЗЗ зростаi. Це приведе до збiльшення напруги на його виходi, внаслiдок чого конденсатор С2 буде довше розряджатися, тобто кут α буде зростати. У результатi вихiдна напруга зменшиться майже до первiсноi. При зменшеннi напруги на навантаженнi (наприклад, внаслiдок зменшення напруги в мережi або збiльшення струму навантаження) напруга на виходi ПЗЗ зростаi й кут керування α зменшуiться.
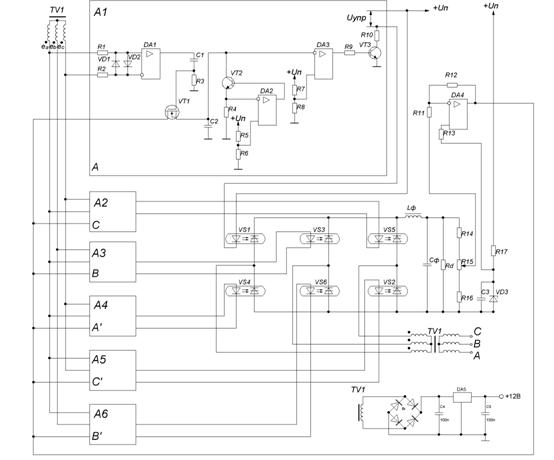
Рис.1.6.
2. Розрахунок силовоi частини
Трифазна схема Ларiонова зображена на рис. 2.1.
Вихiднi данi:
f=50 Гц;
UC =220 B;
δUC = +/-10% B;
UH =36 B;
δUH= +/-1% B;
ΔUH= +/-10% B;
Кп = 2%;
Рн = 2000 Вт;
Рн хв = 200 Вт.
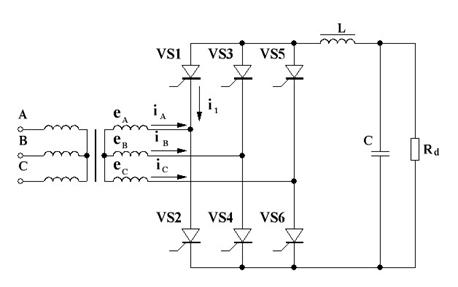
Рис. 2.1.
Розрахунок граничних значень випрямленоi напруги й мережного:
![]() B;
B;
![]() B;
B;
![]() B;
B;
![]() B.
B.
Розрахунок дiапазону регулювання випрямляча:
Дана схема трифазного випрямляча буде працювати в режимi безперервного струму навантаження й позитивного выпрямленного напруги, при цьому кут регулювання змiнюiться в межах ![]() .
.
Регулювальна характеристика описуiться вираженням:
Задаiмося мiнiмальним кутом регулювання ![]() .
.
Визначаiмо ![]() при
при ![]() й
й ![]() :
:
![]() B.
B.
Коефiцiiнти змiни живлячоi напруги (Е1=UC):
![]()
![]() .
.
Номiнальна й максимальна фазна напруга на вториннiй обмотцi:
![]() B;
B;
![]() B;
B;
Максимальний кут регулювання ![]() :
:
 ;
;
 .
.
Дiапазон регулювання ![]() .
.
Розрахунок i пiдбор вентилiв:
Середнiй струм тиристорiв випрямляча:
![]() А;
А;
 А;
А;
Дiюче значення струму тиристорiв:
![]() ВаА;
ВаА;
Зворотна напруга на вентилях випрямляча:
![]() ВаВ.
ВаВ.
Тиристори: ТЕ 132-40-3з параметрами: максимальний середнiй струм ![]() А; струм керування
А; струм керування ![]() мА; максимальний струм керування
мА; максимальний струм керування ![]() А; максимальна зворотна напруга
А; максимальна зворотна напруга ![]() В; максимальне спадання напруги у вiдкритому станi
В; максимальне спадання напруги у вiдкритому станi ![]() В; дiапазон робочоi температури
В; дiапазон робочоi температури ![]() С.
С.
Розрахунок LC- фiльтра.
Для розрахунку фiльтра необхiдно знайти значення коефiцiiнта пульсацiй по першоi гармонiки:
 ;
;
Де mn= 1-1- число пульсацiй, q = 1-1- № гармонiки.
![]() ;
;
Розрахуiмо значення iндуктивностi L:
 ;
;
Добутку LC:
 ; де
; де  ;
;
 ;
;
Розрахунок значення iмностi конденсатора З:
![]() ;
;
Вибираiмо електролiтичний конденсатор фiрми PanasonicECOSIAA394DA.
Розрахунок дроселя L:
Початковi умови:
L= 160 мкГн;
f= 300 Гц;
РЖд=62А;
Сердечник стрiчковий броньового типу. Магнiтопровiд зi сталi З423 з товщиною стрiчки 0,15мм. РЖндукцiя Вm = про,9 Тл.
Розрахунок ведемо за методикою, викладеноi в книзi Мелешина В.И. "Транзисторна перетворювальна технiка". З таблицi для даного типу сердечника й магнiтопроводу записуiмо значення Kj = 366 А/див2 i в = -0,12.
Дiюча напруга на обмотцi:
![]() В;
В;
Добуток ScSo при коефiцiiнтi заповнення вiкна Ки = 0,4:
 см4;
см4;
З довiдника вибираiться сердечник ШЛ 12*25 з параметрами:
а = 12, в = 25, з=12, h = 30 мм, So = 3,6 див2 , ScSo = 10,8 див4 , lc = 10,2 див, активний перетин сердечника ScKc =2,42 див2, ScKcSo = 8,712 див4.
Число виткiв дроселя:
 ;
;
Знаходження повiтряного зазору:
![]() мм.
мм.
Коефiцiiнт витрiщання магнiтного потоку в зазорi:
 ;
;
Уточнення необхiдного числа виткiв:
 ;
;
Визначення щiльнiсть струму:
![]() А/мм2.
А/мм2.
Розрахунок перетину проведення:
![]() мм2.
мм2.
Вибираiмо проведення ПЭТВ перетином 2,217 мм2 i з питомим опором 0,00791.
Розрахунок опору дроселя:
![]() Ом.
Ом.
Розрахунок трансформатора.
Коефiцiiнт трансформацii:
 .
.
Габаритна потужнiсть трансформатора:
![]() ВА.
ВА.
Тип магнiтопроводу: ТЛ25х40.
Активний опiр трансформатора ![]() Вай iндуктивнiсть розсiювання
Вай iндуктивнiсть розсiювання ![]() Ваобмоток трансформатора:
Ваобмоток трансформатора:
 ;
;
 ;
;
де ![]() тАФ щiльнiсть струму в обмотках трансформатора, А/мм2;
тАФ щiльнiсть струму в обмотках трансформатора, А/мм2;
![]() ВатАФ амплiтуда магнiтноi iндукцii, Т.
ВатАФ амплiтуда магнiтноi iндукцii, Т.
Визначаiмо ![]() ,
, ![]() Ва:
Ва: ![]() ВаА/мм2,
ВаА/мм2, ![]() Т.
Т.
Визначаiмо ![]() ,
, ![]() :
:
![]() Ом;
Ом;
![]() Гн.
Гн.
Визначимо ![]() :
:
![]() Ом.
Ом.
Визначимо ![]() :
:
![]() Ом.
Ом.
Максимальне значення струмiв первинноi й вторинноi обмоток трансформатора:
![]() А;
А;
![]() А.
А.
3. Розрахунок системи керування
Напругу Uac обираiмо рiвною 10В. Для того, щоб струм на входi операцiйного пiдсилювача був 10мА обираiмо резистори R1, R2 по 0,5 кОм кожний. Дiоди вибираiмо ВА607, що вiдповiдають схемному рiшенню. Операцiйний пiдсилювач обираiмо МС34063.
Розрахунок RC-ланки:
Час iмпульсу встановлюiмо 10мкс, номiнал резистора ![]() =5кОм, тодi iмнiсть конденсатора обчислюiться:
=5кОм, тодi iмнiсть конденсатора обчислюiться:
![]() нФ.
нФ.
Польовий транзистор VT1 вибираiмо IRML2402.
Конденсатор С2повинен розрядитись за 0,47 мс струмом джерела струму в 0,1 мА визначаiться за формулою:
![]() нФ.
нФ.
Розрахунок резисторiв R4 ,R5 ,R6:
Обираiмо напругу на резисторi R4 рiвною 1 В, ![]() кОмж
кОмж
Обираiмо напругу на резисторi R6 рiвною 1 В, опiр R6 = 1 кОм, тодi R5= 1 1кОм.
Розрахунок резисторiв R7 ,R8:
Резистори R7 ,R8 повиннi забезпечити рiвень компорирування на половини напруги живлення, iх номiнали однаковi, по 10кОм.
Розрахунок пiдсилювача на бiполярному транзисторi VT3:
Бiполярний транзистор VT3 вибираiмо ВС848.
Резистор
![]() Ом;
Ом;
![]() кОм.
кОм.
Розрахунок пiдсилювача сигналу помилки:
Коефiцiiнт пiдсилення обираiмо рiвним 20.
R11= 100 кОм, R12 = 20* R11=2 МОм, R13= R11= 100 кОм
Розрахунок формувача опорноi напруги:
Напруга на R16:
![]() ;
;
Задаiмося ![]() В, R16= 5 кОм, тодi R14= 31 кОм, а R15= 0,1R16= 500 Ом,
В, R16= 5 кОм, тодi R14= 31 кОм, а R15= 0,1R16= 500 Ом,
![]() Ом.
Ом.
Конденсатор С3 обираiмо 0,22 мкФ.
Дiаграми роботи системи керування (для одного вентиля) зображено на рис. 3.1.
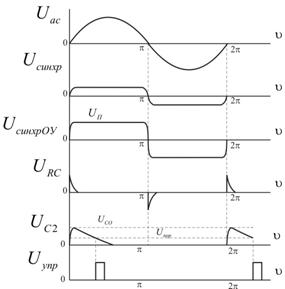
Рис. 3.1.
4. Моделювання перехiдного процесу
Для моделювання процесiв в схемi, ми маiмо скласти диференцiйнi рiвняння, що описують роботу схеми. Перед тим як скласти систему рiвнянь необхiдно зобразити схему замiщення i обумовити спрощення моделей елементiв. Всi ветилi мають однаковi параметри та однаковий опiр у вiдкритому станi, дросель замiнюiться iндуктивнiстю та послiдовно пiдтАЩiднаним опором, напруга на всiх обмотках трансформатора однакова, лише змiщена по фазi, враховуiться опiр обмоток, опiр конденсатора не враховуiмо.
Схема замiщення зображена на рис.4.1.
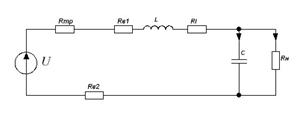
Рис.4.1.
Оскiльки форма напруги перiодична то достатньо дослiдити лише два вiдрiзки часу коли вiдкритими i два вентильних елемента протягом ![]() . Перiодом Т будемо вважати сусiднi моменти природноi комутацii. Кут керування обираiмо номiнальний
. Перiодом Т будемо вважати сусiднi моменти природноi комутацii. Кут керування обираiмо номiнальний ![]() . Для зручностi перейдемо в областi часу, кут
. Для зручностi перейдемо в областi часу, кут ![]() Вазамiнимо на
Вазамiнимо на ![]() с и в радiани
с и в радiани ![]() .
.
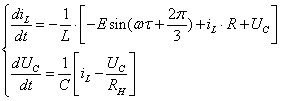
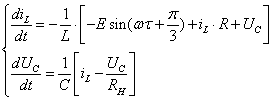
Протягом перiоду Т структура схеми замiщення не мiняiться, змiнюiться лише напруга U.
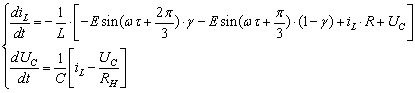
Система диференцiйних рiвнянь маi наступнiй вигляд:
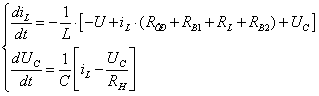 ;
;
В залежностi вiд iнтервалу напруга U буде рiвною:
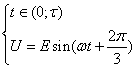 ,
, 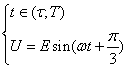 .
.
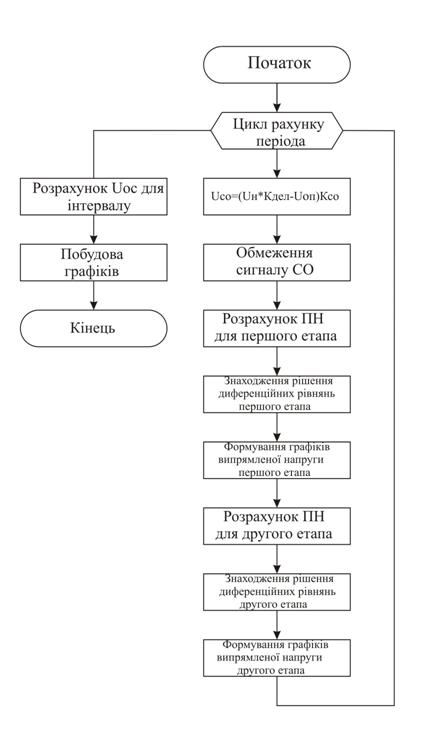
Отриману систему рiвнянь використаiмо при моделюваннi перехiдних процесiв у схемi. Моделювання будемо здiйснювати за допомогою програми MathLab 7.5. Блок-схема програми моделювання перехiдних процесiв у схемi наведено у Додатку №1.
В результатi моделювання були отриманi графiки струму iндуктивностi, напруги на iмностi, випрямленоi напруги та основних напруг системи керування: ГПН та сигналу помилки.
Графiк перехiдного процесу показано на рис. 4.2.
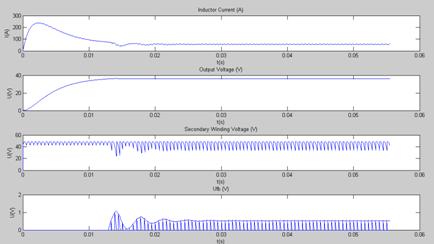
Рис. 4.2.
Бiльш детально графiки в момент пуску та для усталеного режиму показано на рис. 4.3 та 4.4 вiдповiдно.
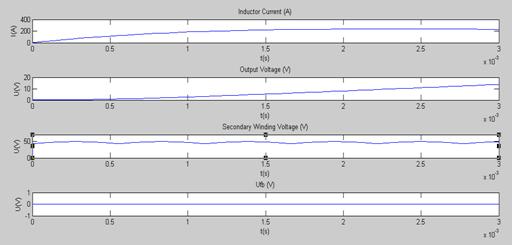
Рис. 4.3.
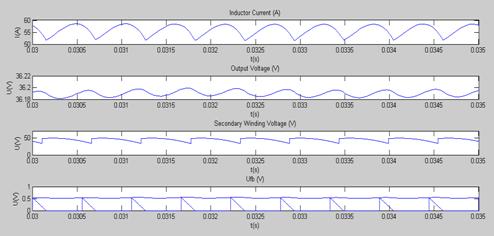
Рис. 4.4.
5. Дослiдження стiйкостi
Дослiдження стiйкостi будь-якоi системи можна розбити на етапи:
1. Складання рiвнянь на окремих iнтервалах роботи;
2. ОбтАЩiднання отриманих рiвнянь;
3. Лiнеаризацiя рiвнянь вiдносно однiii iз змiнних стану;
4. Знаходження розвтАЩязку усталеного режиму;
5. Дослiдження стiйкостi по характеристичному рiвнянню.
Рiвняння для кожного iнтервалу роботи схеми ми знайшли в попередньому пунктi, при дослiдженi перехiдного процесу:
Для зручностi написання систем обтАЩiднаiмо послiдовно пiдключенi опори ![]() ВаОм.
ВаОм.
1.  ;
;
2.  .
.
Систему керування можна описати наступною системою рiвнянь:
 ,
,
де, ![]() Ва- сигнал помилки,
Ва- сигнал помилки, ![]() Ва- вихiдна напруга,
Ва- вихiдна напруга, ![]() Ва- опорна напруга,
Ва- опорна напруга, ![]() Ва- сигнал зворотнього звтАЩязку,
Ва- сигнал зворотнього звтАЩязку, ![]() Ва- коефiцiiнт пiдсилення ,
Ва- коефiцiiнт пiдсилення , ![]() Ва- функцiя, що приймаi значення 1 при високому рiвнi на виходi СК, а 0 тАУ при низькому.
Ва- функцiя, що приймаi значення 1 при високому рiвнi на виходi СК, а 0 тАУ при низькому.
Використаiмо ![]() Вадля того, щоб обтАЩiднати системи рiвнянь для двох iнтервалiв роботи схеми.
Вадля того, щоб обтАЩiднати системи рiвнянь для двох iнтервалiв роботи схеми.
 .
.
Представимо отриману систему рiвнянь у матричнiй формi:
![]() ,
,
де
![]() ,
, 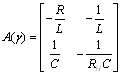 ,
,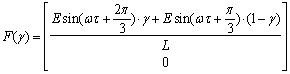 .
.
Лiнеаризуiмо отриману систему в "малому". Знайдем диференцiали по змiнним стану вiд правоi i лiвоi частин системи. Ввiвши позначення ![]() ,
, ![]() , отримаiмо рiвняння
, отримаiмо рiвняння
![]() ,
,
де  ,
, ,
, .
.
Оскiльки матриця ![]() Ване залежить вiд змiнних стану
Ване залежить вiд змiнних стану ![]() та
та ![]() , то
, то ![]() .
.
![]() ,
,![]()
![]() ,
,
де ![]() ВатАУ
ВатАУ ![]() -функцiя Дiрака.
-функцiя Дiрака.
Використаiмо наступну властивiсть ![]() -функцii
-функцii
 ,
, ![]()
![]() ,
,
 ;
;
 .
.
оскiльки ![]() , то можемо записати:
, то можемо записати:
 .
.
Використовуючи властивiсть ![]() -функцii
-функцii ![]() , визначимо значення добутку:
, визначимо значення добутку:
 .
.
Оскiльки
![]()
то  ;
;
![]() ,
,
де матриця S маi вигляд:
 .
.
Визначимо матрицi А1 та А2:
![]() ,
, ![]() ,
, .
.
Знайдемо розвтАЩязок рiвняння на iнтервалi постоянства структури з використанням неперервного перетворення Лапласа на iнтервалi ![]() .
.
![]() ,де
,де ![]() .
.
Застосуiмо неперервне перетворення Лапласа до лiвоi i правоi частини рiвняня:
![]() .
.
Рiшаючи отримане матричне рiвняння отримаiмо:
![]() , де
, де ![]() ВатАУ зворотня матриця;
ВатАУ зворотня матриця;
 ,
,![]() .
.
Для переходу в часову область використаiмо зворотнi перетворення Лапласа, в результатi чого отримаiмо:
![]() ,
,
де ![]() .
.
Знайдемо розвтАЩязок рiвняння на iнтервалi постоянства структури з використанням неперервного перетворення Лапласа на iнтервалi ![]() :
:
![]() ,де
,де ![]() .
.
Застосуiмо неперервне перетворення Лапласа до лiвоi i правоi частини рiвняня:
![]() .
.
Рiшаючи отримане матричне рiвняння отримаiмо:
![]() ,
,
де ![]() ВатАУ зворотня матриця.
ВатАУ зворотня матриця.
Для переходу в часову область використаiмо зворотнi перетворення Лапласа, в результатi чого отримаiмо:
![]() ;
;
де ![]() .
.
Пiдставимо в рiвняння для iнтервалу ![]() Вазначення часу
Вазначення часу ![]() , а в рiвняння для iнтервалу
, а в рiвняння для iнтервалу ![]() ВатАУ значення часу
ВатАУ значення часу ![]() , пiсля чого пiдставимо перше рiвння у друге:
, пiсля чого пiдставимо перше рiвння у друге:
![]() ;
;
 ;
;
 .
.
Отримане рiвняння визначаi стiйкiсть у "малому" початковоi нелiнiйноi системи в околi установившогося режиму ![]() .
.
Застосуiмо дискретне перетворення Лапласа до отриманого рiвняння:
![]() ,
,
де ![]() ВатАУ дискретне зображення Лапласа
ВатАУ дискретне зображення Лапласа ![]() ;
; ![]() ВатАУ початкове значення вектору
ВатАУ початкове значення вектору ![]() :
: ![]() . Перетворивши отримане рiвняння отримаiмо:
. Перетворивши отримане рiвняння отримаiмо:
![]() .
.
В результатi вiдкриття визначника ![]() , знаходимо характеристичний многочлен:
, знаходимо характеристичний многочлен:
![]() ;
;
![]()
![]() .
.
Зробимо замiну змiнних ![]() ;
;
![]() ;
;
![]() ,
,![]() .
.
Коренi даного рiвняння знаходяться в серединi кола одиничного радiуса i тому можна зробити висновок, що дана схема являiться стiйкою.
6. Висновки
У данiй курсовiй роботi був виконаний розрахунок перехiдного процесу, що виникаi при включеннi пристрою, i стiйкостi в "малому" сталому режимi, на прикладi трьохфазного мостового випрямляча iз ШРЖМ першого роду. При виконаннi курсовоi роботи була спроектована принципова схема пристрою. Схему такого випрямляча можна вiднести до схем зi постiйною структурою й аналiзувати неi на iнтервалах роботи, де змiнюiться напруга. Для розрахунку перехiдного процесу були складенi диференцiальнi рiвняння й по них побудованi графiки, елементи силовоi частини при цьому замiнялися iхнiми iдеалiзованими моделями. Також був проведений розрахунок стiйкостi системи, що показав, що дана система i стiйкою.
7. Лiтература
1. Г.С. Найвельт и др. "Источники электропитания радиоэлектронной аппаратуры. Справочник". М.: Радио и связь, 1985
2. Перетворювальна технiка. Частина 1: Пiдручник./ В. С. Руденко, В. Я. Ромашко, В. Г. Морозов. тАУ К.: РЖСДО, 1996.тАУ 262 с.
3. Замкнутые системы преобразования электрической энергии. Под ред. Д-ра техн. наук В.Я. Жуйкова. тАУ Киев, "Техника", 1989.
4. Методические указания к курсовой работе по курсу "Преобразовательная техника" для студентов специальности "Промышленная электроника" всех форм обучения. Сост.: В. С. Руденко, В. Г. Морозов, В. Я. Ромашко. тАУ Киев: КПИ, 1984. тАУ 56с.
Додаток 1.
Додаток 2.
function main;
Rv1=37*10^(-3);
Rv2=Rv1;
Rdr=80*10^(-3);
Rd=0.648;
Ld=160*10^(-6);
C=39*10^(-3);
E=20*sqrt(6);
U0=0;
I0=0;
t=0;
K=-3500;
U_start=0;
Kfb=20;
Pi=3.1415;
L=Pi/7;
s=0;
Z=0;
Y=[0, 0];
t=0;
PhaseShift=2*Pi/3;
Ufb=0;
Uref=5;
D=0;
Dx=0;
Dt=0;
Dtx=0;
Ufb=0;
O=0;
P=0;
w=2*Pi*300;
for f=1:100
s=0;
Z=0;
Dtx=0;
Dx=0;
U_start=(Y(end,2)*5/36-Uref)*Kfb;
if (U_start<0)
U_start=0;
end
Dtx(1)=0;
Dtx(2)=-U_start/K;
if (Dtx(2)>((Pi/3)/w))
Dtx(2)=(Pi/3)/w;
end
Dx(1)=U_start;
Dx(2)=K*Dtx(2)+U_start;
Y0=[Y(end,1),Y(end,2)];
[s,Z]=ode113(@F_first, [0 (Dtx(2)+10^-8)], Y0);
s=s+t(length(t));
Y=[Y;Z];
t=[t;s];
n=0;
Ox=0;
Px=0;
for x=0:0.000001:Dtx(2)+10^-8
n=n+1;
Ox(n)=E*sin(w*x+PhaseShift);
Px(n)=x;
end
Px=Px+P(length(P));
P=[P, Px];
O=[O, Ox];
PhaseShift=PhaseShift-Pi/3;
PhaseShift=PhaseShift+(Dtx(2)+10^-8)*w;
Dtx(3)=(Pi/3)/w;
Dx(3)=0;
s=0;
Z=0;
Y0=[Y(end,1),Y(end,2)];
[s,Z]=ode113(@F_first, [0 (Dtx(3)-Dtx(2))+10^-8], Y0);
s=s+t(length(t));
Y=[Y;Z];
t=[t;s];
n=0;
Ox=0;
Px=0;
for x=0:0.000001:(Dtx(3)-Dtx(2))
n=n+1;
Ox(n)=E*sin(w*x+PhaseShift);
Px(n)=x;
end
Px=Px+P(length(P));
P=[P, Px];
O=[O, Ox];
PhaseShift=PhaseShift+(Dtx(3)-Dtx(2))*w;
Dtx=Dtx+Dt(length(Dt));
D=[D, Dx];
Dt=[Dt, Dtx];
end
for x=1:length(t)
Ufb(x)=(Y(x, 2)*5/36-Uref)*Kfb;
if (Ufb(x)<0)
Ufb(x)=0;
end
end
I=Y;
I(:, 2)=[];
subplot(4,1,1);
plot(t,I);
xlabel('t(s)');
ylabel('I(A)');
title('Inductor Current (A)');
hold on;
I=Y;
I(:, 1)=[];
subplot(4,1,2);
plot(t,I);
title('Output Voltage (V)');
xlabel('t(s)');
ylabel('U(V)');
subplot(4,1,3);
plot(P,O);
xlabel('t(s)');
ylabel('U(V)');
title('Secondary Winding Voltage (V)');
subplot(4,1,4);
plot(t,Ufb);
hold on;
plot(Dt, D);
title('Ufb (V)');
xlabel('t(s)');
ylabel('U(V)');
function G = F_first(t, y)
Ud=E*sin(w*t+PhaseShift);
G=[-1/Ld*(-Ud+y(1)*(Rv1+Rv2+Rdr)+y(2)); 1/C*(y(1)-y(2)/Rd)];
end
end
Вместе с этим смотрят:
IP-телефония. Особенности цифровой офисной связи