Нелинейные САУ
Федеральное агентство по образованию Российской Федерации
Орловский Государственный технический университет
Орловский технологический институт
Орловский политехнический колледж
Реферат
По дисциплине: ВлАвтоматическое управлениеВ»
Тема: ВлНелинейные САУВ»
Студент:
Группа:
Специальность: 220301
Реферат защищен с оценкой:
Руководитель: Гаранжа Т.С.
Орел 2007
Нелинейные системы
Влияние нелинейностей на свойства систем
При рассмотрении условий устойчивости линейной модели было установлено, что устойчивость или неустойчивость линейной модели зависят только от свойств системы и совершенно не зависят от величины начального отклонения, входного сигнала или возмущения. Было показано, что у неустойчивой линейной системы значения отклонений от любых начальных условий неограниченно растут.
Если не рассматривать системы, параметры которых точно соответствуют границе области устойчивости, то оказывается, что в линейной системе возможны лишь два типа движений. Устойчивая линейная система после любого отклонения с течением времени стремится (монотонно или немонотонно) к положению равновесия. Неустойчивая линейная система, наоборот, после любого начального отклонения монотонно или немонотонно уходит от равновесия, и её выходной сигнал неограниченно растёт по абсолютной величине. При параметрах, точно соответствующих границе области устойчивости, возможны незатухающие колебания. Амплитуда этих колебаний зависит от начальных условий. При самом незначительном изменении параметров колебания превращаются в затухающие или неограниченно нарастающие. Никакие иные движения в линейной модели невозможны.
Движения в реальных системах могут быть значительно разнообразнее движений, возможных в линейной модели.
Например, в реальных системах часто наблюдается возникновение незатухающих колебаний. Эти колебания обладают определенной устойчивостью: после возмущения они восстанавливаются с течением времени, то есть восстанавливаются и форма колебаний, и их частота. Форму и частоту этих колебаний можно изменять, меняя параметры системы.
Реальная система отличается от её линейной модели не только возможностью возникновения незатухающих колебаний, но и тем, что в ней (реальной системе) характер движений часто зависит от величины вызвавшего их начального возмущения. В реальной системе может существовать такой порог, что начальные возмущения, не превосходящие этот порог, вызывают движение, сходящееся к положению равновесия, а в результате возмущений, превосходящих указанный порог, в системе устанавливаются устойчивые незатухающие колебания.
В ряде случаев в системах автоматического регулирования возможны не один, а несколько режимов незатухающих колебаний, причем только от величины начального возмущения зависит, какие из этих колебаний установятся в системе. Так, например, нередко можно наблюдать, что после небольших начальных возмущений, не превосходящих определенного порога, в системе устанавливаются высокочастотные незатухающие колебания с амплитудой, меньшей этого порога. Если же начальные возмущения превзойдут этот порог, то в системе устанавливаются низкочастотные незатухающие колебания, имеющие значительно большую амплитуду.
Явления подобного рода могут быть обусловлены только факторами, не учитываемыми при рассмотрении линейной модели. Такими факторами являются нелинейности, которые при использовании линейной модели заменяются линейными зависимостями (в случае линеаризуемых нелинейностей) или вообще выбрасываются из рассмотрения (в случае нелинеаризуемых нелинейностей). Для того чтобы описать указанные движения и, в частности, незатухающие колебания, необходимо учесть наличие нелинейностей. Отметим, что при линеаризации, осуществляемой в системе (а не только в её модели) с использованием функционального блока с обратной нелинейностью, система или её линеаризуемая часть действительно становятся линейными.
Незатухающие колебания в системах автоматического регулирования, о которых выше шла речь, возникают при отсутствии внешних периодических воздействий только за счет внутренних свойств системы регулирования. Их частота целиком определяется свойствами системы и меняется при изменении ее параметров. Это тАФ типичные автоколебания, возникающие благодаря равенству потерь энергии за период колебаний притоку энергии от внешнего источника. Таким внешним источником энергии служит обычно регулируемый объект или имеющиеся в системе усилители сигнала. Только благодаря наличию нелинейностей возможен указанный выше баланс энергии за колебательный цикл, и вычисление условий существования незатухающих колебаний сводится, по существу, к определению условий реализации этого баланса.
Исследование всех движений, возможных в нелинейных системах, тАФ задача очень сложная. До сих пор не разработаны аналитические методы решения задач такого рода в сколько-нибудь общих случаях. Наибольшие трудности возникают при определении порогов для начальных возмущений, разграничивающих области с различными типами переходных процессов. Внутри каждой из таких областей процессы сходятся к одинаковым (или однотипным) установившимся состояниям (например, к равновесиям или к незатухающим колебаниям). Аналитические методы позволяют решать частВнные нелинейные задачи двух типов.
Во-первых, это определение условий, при которых после любого возмущения система движется к положению равновесия, то есть условия, при которых нелинейная система ведет себя с практической точки зрения подобно устойчивой линейной системе.
Во-вторых, это нахождение (чаще всего приближенно) возможных в системе периодических режимов вне зависимости от их устойчивости и, тем более, без точного определения границ устойчивости этих периодических режимов.
Сколько-нибудь более полное аналитическое исследование нелинейных систем удается проводить лишь в частных случаях, например в некоторых системах, описываемых дифференциальными уравнениями второго или третьего порядка или в системах, дифференциальные уравнения которых содержат специальным образом входящие малые параметры. Поэтому за последние десятилетия интенсивно развивается иной подход, основанный на компьютерном моделировании нелинейных систем. Современные продвинутые методы решения сложных систем нелинейных дифференциальных уравнений позволяют путём многократных прогонов задач получать достаточно полные картины поведения нелинейных систем при саВнмых разных возмущениях и вариациях параметров систем. На первый план выдвинулась задача не получения точных решений аналитическим путём, а построения моделей, адекватно описывающих поведение системы. И тут очень важными являются предварительные качественные оценки поведения системы, получаемые из аналитических построений. Одним из наиболее эффективных и наглядных методов качественного исследования поведения систем является построение их фазовых портретов.
Фазовые портреты нелинейных систем
Совершенно так же, как и в линейной системе, процесс регулирования, описываемый уравнениями, содержащими нелинейности, может быть представлен на фазовой плоскости или в фазовом пространстве.
Рассмотрим и здесь в качестве основного примера случай, когда движения описываются двумя дифференциальными уравнениями первого порядка:

гдеf1(x1, х2) и f2(х1,х2) тАФ заданные, в общем случае нелинейные функции указанных аргументов.
Дифференциальное уравнение фазовых траекторий получается, если вместо производных по времени ввести производную dx1/dx2.
Получаем:

К фазовой траектории может быть проведена только одна касательная, и, следовательно, фазовые траектории не пересекаются во всех тех точках фазовой плоскости, где не обращаются одновременно в нуль f1(х1, x2) и f2(х1, х2). Особые точки системы находятся из условия dx1/dx2 = 0/0, то есть определяются как общие корни двух уравнений:

В предыдущем случае при рассмотрении линейной системы было:
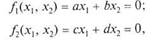
и уравнения имели только одно общее решение: х1 = х2 =0. В плоскости х1, х2 этм условия в случае линейной системы определяют две прямые линии, пересекающиеся в начале координат (рис.1, а). Если же функции f1(х1, x2) и f2(х1, х2) нелинейны, то кривые, соответствующие уравнениям, могут пересекаться и вне начала координат. Система имеет в этом случае, кроме реВншения х1, =х2 = 0, и другие решения. В этом случае, кроме регулируемого режима, соответствующего началу координат, в системе возможны и иные положения равновесия (рис.1, б), и характер движения в системе зависит от величины отклонения от начала координат, вызванного возмущением.
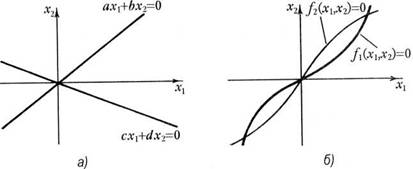
Рис.1 Графики, соответствующие уравнениям для линейной (а) и нелинейной (б) систем
В рассматриваемом нелинейном случае особые точки могут быть лишь тех же типов, что и в линейной системе (фокусы, узлы и седла). Чтобы в нелинейном случае определить тип особой точки, надо составить соответствующее этой особой точке уравнение линейного приближения, разложив в окрестности этой точки в ряды правые части уравнений и сохранив затем в этих рядах только линейные члены. Эта операция эквивалентна ВллокальнойВ» линеаризации системы вблизи особой точки.
На рис.2, а в качестве примера показан фазовый портрет системы для случая, когда кривые f1(х1, x2) = 0 и f2(х1, х2) = 0 пересекаются в двух точках. Кроме начала координат, где находится особая точка тАФ аттрактор тАФ устойчивый фокус, они пересекаются ещё в одной точке тАФ неустойчивом узле, где располагается седло. Жирной линией показана траектория, проходящая через седло и выделяющая область притяжения устойчивого равновесного режима, то есть аттрактора типа Влустойчивый фокусВ», расположенного в начале координат (эта область заштрихована на рисунке).
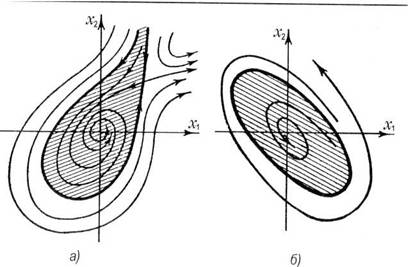
Рис.2. Фазовые портреты нелинейных систем: а тАФ с устойчивым фокусом и седлом, б тАФ с устойчивым фокусом и предельным циклом. В обоих случаях имеются заштрихованные области устойчивости
До тех пор, пока изображающая точка на фазовой плоскости рис. 2, а находится внутри заштрихованной области, с течением времени фазовые траектории системы будут стремиться к началу координат, и по отношению к таким начальным состояниям система является устойчивой. Если же в результате возмущения изображающая точка окажется вне заштрихованной области, то исходящая из этой точки фазовая траектория уходит в бесконечность, и по отношению к такому возмущению система неустойчива. Заштрихованную область притяжения особой точки, расположенной в начале координат, поэтому можно назвать областью устойчивости системы. Фазовый портрет, показанный на рис. 2, а, так же, как и фазовый портрет линейной системы, не содержит замкнутых фазовых траекторий. Между тем в нелинейных системах, как в том случае, когда имеется одна особая точка, так и в случае нескольких особых точек, могут содержаться замкнутые траектории.
На рис.2, б показан пример системы, имеющей только одну особую точку в начале координат (устойчивый фокус) и одну замкнутую траекторию, охватывающую начало координат. Фазовые траектории не могут пересекаться где-либо вне особой точки, и поэтому замкнутая траектория (ее называют предельным циклом) отделяет область притяжения особой точки тАФ заштрихованную область устойчивости системы от ВлвнешнейВ» части фазовой плоскости, где система неустойчива. Внутри предельного цикла фазовые траектории ВлсматываютсяВ» с него и ВлнаматываютсяВ» на начало координат. Снаружи фазовые траектории ВлразматываютсяВ» с предельного цикла, и по любой фазовой траектории изображающая точка уходит в бесконечность. Сам предельный цикл соответствует незатухающим колебаниям, но в данном случае они неустойчивы, поэтому такой предельный цикл называется неустойчивым предельным циклом. Достаточно сколь угодно малого возмущения, чтобы изображающая точка, сойдя с предельного цикла, более уже не возвращалась на него, а перемещалась бы по соответствующей траектории к началу координат или в бесконечность. Незатухающие колебания в такой системе реально не наблюдаются, а роль предельного цикла состоит лишь в ограничении области действия аттрактора.
Другой пример системы, имеющей одну особую точку (Влнеустойчивый фокусВ») и один охватывающий ее предельный цикл, показан на рис.3, а.
Здесь положение равновесия неустойчиво, но Влобласть отталкиванияВ» или неустойчивости системы ограничена предельным циклом (эта область заштрихована на рис.3, а). При начальном положении изображающей точки внутри заштрихованной области система будет двигаться по траектории, соответствующей колебаниям с нарастающей амплитудой, и постепенно в системе установятся незатухающие колебания, соответствующие предельному циклу. Наоборот, при начальном положении вне заштрихованной области, колебания затухают до тех пор, пока точка не попадёт на предельВнный цикл, и установятся колебания, соответствующие предельному циклу. Он в этом случае не только разделяет две области фазового портрета, но и определяет устойчивые незатухающие колебания в системе {устойчивый предельный цикл). В данном случае предельный цикл является аттрактором.
На рис.3, б показан фазовый портрет системы, содержащий два предельных цикла, охватывающих единственную особую точку тАФ устойчивый фокус. Эта система имеет два аттрактора.
Область притяжения первого аттрактора тАФ фокуса в начале координат, соответствующего регулируемому равновесию, ограничена внутренним неустойчивым предельным циклом.
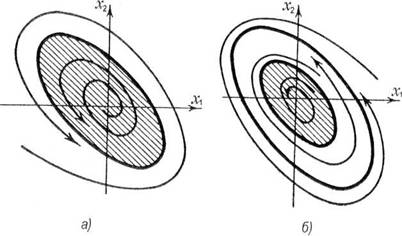
Рис. 3 Фазовые портреты нелинейных систем с предельными циклами: а тАФ в системе один аттрактор тАФ устойчивый предельный цикл, его область притяжения тАФ вся фазовая плоскость, б тАФ система с двумя предельными циклами (устойчивым и неустойчивым) и одним устойчивым фокусом
Если возмущения не выводят систему за пределы области, охватываемой внутренним предельным циклом, положение равновесия восстанавливается и система сохраняет устойчивость. Если же система окажется вне внутреннего предельного цикла, она попадает в область притяжения второго аттрактора тАФ внешнего устойчивого предельного цикла, и в системе с течением времени устанавливаются незатухающие колебания, соответствующие внешнему циклу.
На рис.4, а показан аналогичный фазовый портрет для случая, когда положение регулируемого равновесия неустойчиво, и в начале координат располагается неустойчивый фокус. Если начальное состояние этой системы лежит в любой точке фазовой плоскости, лежащей внутри внешнего предельного цикла, то в системе устанавливаются незатухающие колебания, соответствующие единственному аттрактору тАФ внутреннему предельному циклу. Если же начальное состояние окажется вне внешнего предельного цикла, то в системе возникают колебания, амплитуда которых неограниченно растет.
Система может иметь предельные циклы и тогда, когда фазовый портрет содержит более одной особой точки. Пример такого рода показан на рис.4, б. Здесь регулируемое равновесие неустойчиво(в начале координат тАФ неустойчивый фокус), предельному циклу соответствуют устойчивые незатухающие колебания, которые устанавливаются с течением времени, если начальная точка лежит внутри области, выделенной фазовой траекторией, проходящей через вторую особую точку тАФ седло. Эта траектория выделена на рис.4., б жирной линией.

Рис.4. Фазовые портреты нелинейных систем, не имеющих устойчивых особых точек: а тАФ система с двумя предельными циклами, из которых только внутренний устойчив, б тАФ система с устойчивым предельным циклом и седлом
Если фазовый портрет системы содержит более одной особой точки или если он содержит замкнутые траектории (предельные циклы), то область устойчивости не может охватывать всей фазовой плоскости подобно тому, как это имеет место в линейной системе. В этом случае область устойчивости всегда ограничена предельным циклом или фазовой траекторией, проходящей через особую точку.
Разумеется, фазовый портрет нелинейной системы может и не содержать дополнительных особых точек или замкнутых траекторий. В этом случае область влияния начала координат фазового пространства может охватывать всю фазовую плоскость и, так же, как в линейной системе, устойчивость не зависит от величины начального положения изображающей точки и величины возмущений.
До сих пор рассматривалась система, для описания которой достаточно двух уравнений первого порядка
В большинстве случаев при решении практических задач теории автоматического регулирования приходится иметь дело с уравнениями более высоких порядков.
Если порядок уравнения системы п больше, чем второй, то вместо двумерного фазового пространства тАФ плоскости рассматривают -мерное пространство, то есть такое пространство, в котором для задания точки надо задать п чисел тАФ координат.
Если система дифференциальных уравнений имеет периодическое решение, то этому решению в фазовом пространстве соответствует замкнутая кривая. На плоскости замкнутые кривые являлись границами областей. В пространстве же ограничивать определенные области могут только поверхности, а не кривые. Поэтому замкнутая траектория по-прежнему соответствует периодическому решению рассматриваемой системы дифференциальных уравнений, но не служит границей области.
Существуют два принципиальных различия между фазовой плоскостью и фазовым пространством.
1.ВаВаВаВаВа На фазовой плоскости предельный цикл является не только образом колебательного движения, но и границей области устойчивости для другого предельного цикла или особой точки.
Иногда границей служат и сепаратрисные кривые, но это имеет место в сравнительно редких случаях (главным образом при наличии нескольких особых точек, когда сепаратрисами служат траектории, проходящие через седла тАФ см. рис.2, а и рис.4, б).
В фазовом же пространстве никакая кривая (в том числе и предельный цикл) не может быть границей области.
Области ограничиваются сепаратрисными поверхностями, целиком состоящими из фазовых траекторий.
В результате для фазовой плоскости нахождение особых точек и предельных циклов часто решает задачу и об областях устойчивости Влв большомВ». В фазовом же пространстве нужно для этого найти и сепаратрисные поверхности тАФ задача чрезвычайно сложная.
2.ВаВаВаВаВа В системах второго порядка колебания могут быть только пеВнриодическими на одной определённой частоте.
При более высоких порядках могут сосуществовать колебания разных частот, например:

Если частоты w и W не связаны целочисленным соотношением к w = тW(где к и т тАФ целые числа), то сумма этих двух колебаний есть тоже колебание, но непериодическое.
Такое колебание в фазовом пространстве образует уже не замкнутую траекторию, а траекторию, полностью заполняющую некоторую замкнутую поверхность (например, тор тАФ см. рис.5).
Рис.5. Тороидальная поверхность, образуемая колебаниями в системе третьего порядка
Устойчивость нелинейных систем Влв маломВ», Влв большомВ» и Влв целомВ». Системы, эквивалентные устойчивым линейным. Абсолютная устойчивость
Задача расчёта нелинейной САУ может считаться полностью качественно решенной, если определены фазовые портреты, возможные в этой системе, и если в ее пространстве параметров определены бифуркационные границы. Количественное решение задачи требует, кроме того, определения формы и расположения предельных циклов и сепаратрис (или сепаратрисных поверхностей) для каждой точки пространства параметров.
Аналитически столь полно решить нелинейную задачу удается лишь в отдельных частных случаях и, как правило, при существенной идеализации задачи.
С геометрической точки зрения, первая задача состоит в выделении нелинейных систем, у которых фазовое пространство имеет наиболее простую топологическую структуру: единственная особая точка (устойчивый фокус или узел) расположена в начале координат, иных особых траекторий нет, и область устойчивости (притяжения) особой точки охватывает все пространство. Именно такую топологическую структуру имеет фазовое пространство устойчивой линейной системы. В этом смысле задача сводится к отысканию условий, при выполнении которых нелинейная система топологически эквивалентна (условно мы будем говорить просто ВлэквивалентнаВ») устойчивой линейной системе.
Вторая задача связана с определением периодических решений систем дифференциальных уравнений. Знание возможных периодических решений играет разную роль для систем, имеющих второй порядок, и для систем, имеющих более высокий порядок. В любом случае знание периодических решений важно само по себе: если периодическое решение устойчиво, то оно определяет незатухающие колебания, возможные в системе. Но для систем второго порядка знание периодических решений (то есть предельных циклов) и возможных равновесий (особых точек) позволяет часто восстановить фазовый портрет системы, а условия появления периодических решений позволяют восстановить ее бифуркационные границы. Иначе обстоит дело для систем, порядок которых выше двух. У таких систем знание особых точек и предельных циклов недостаточно для восстановления фазового портрета тАФ решающую роль играют сепаратрисные поверхности.
Когда говорят об устойчивости линейных систем, имеют в виду просто сходимость к положению равновесия процесса, вызванного произвольным начальным отклонением или возмущением. Используя геометрический образ фазового пространства, можно уточнить теперь понятие устойчивости нелинейной системы.
Равновесие называется устойчивым Влв маломВ», если ему соответствует в фазовом пространстве системы устойчивая особая точка, то есть можно указать в фазовом пространстве область, из любой точки которой фазовые траектории ведут к точке равновесия.
Таким образом, утверждение, что регулируемый режим устойчив Влв маломВ», означает лишь наличие точки тАФ аттрактора, но не определяет как-либо границ её области притяжения. Пусть фазовый портрет системы построен и выделена область притяжения особой точки (область устойчивости). Назовем ее областью А.
Укажем теперь на фазовой плоскости область, в пределах которой могут оказаться значения координат х1, х2рассматриваемой системы автоматического регулирования в соответствии с условиями ее технической эксплуатации, то есть область рабочих диапазонов х1и х2 . Назовем ее областью В.
Если все точки области В принадлежат области А, то регулируемый режим называется устойчивым Влв большомВ».
На рис.6 показан пример фазового портрета, в котором область устойчивости ограничена неустойчивым предельным циклом. Две области значений х1, х2при любых физически возможных возмущениях системы заданы в виде прямоугольников. В случае рис.6, а система устойчива Влв большомВ», а в случае рис.6, б она устойчива Влв маломВ», но не устойчива Влв большомВ», так как при некоторых значениях х1, и х2, возможных в системе, регулируемый режим не восстанавливается.
Если область притяжения особой точки (область устойчивости) не ограничена и охватывает все фазовое пространство, то есть система устойчива после любых начальных отклонений, то она называется устойчивой Влв целомВ». Если линейная система устойчива, то она всегда устойчива Влв целомВ». Нелинейные системы, имеющие единственное положение равновесия, устойчивое Влв целомВ», составляют класс нелинейных систем, в смысле топологической структуры фазового пространства эквивалентных линейным.
Разработано множество аналитических методов исследования нелинейных систем. Однако как было отмечено выше, все они включают в большинстве случаев существенные упрощающие предположения. Между тем, использование современных быстродействующих компьютеров позволяет за сравнительно короткое время строить реальные фазовые портреты систем без упрощающих предположений. При этом путём прямых компьютерных экспериментов удаётся в большинстве случаев выявить бифуркационные границы и установить комбинации параметров системы, обеспечивающие её устойчивость в целом.
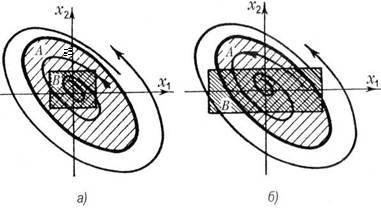
Рис.6. Области устойчивости системы в фазовой плоскости: а тАФ Влв большомВ» и б тАФ Влв маломВ»
Контрольные вопросы
1. Что такое неустойчивая система?
2. В чем особенность фазовых портретов нелинейных систем?
3. Что называется предельным циклом нелинейной системы?
4. Устойчивый и неустойчивый предельный цикл?
5. Роль неустойчивого предельного цикла как границы устойчивости?
6. Может ли линейная система быть устойчивой в малом и неустойчива в большом?
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы