Анализ режимов автоматического управления
1. Исследование режимов системы автоматического управления
1.1 Определение передаточной функции замкнутой системы
1.2 Построение логарифмической амплитудной частотной характеристики
1.3 Построение логарифмической фазовой частотной характеристики
1.4 Временные характеристики САУ
1.5 Исследование устойчивости САУ
2. Синтез системы "объект-регулятор"
2.1 Расчет оптимальных параметров регуляторов
2.2 Выбор оптимального регулятора на основе экспериментальных исследований
Заключение
ВведениеАвтоматика - это область науки и техники, охватывающая теорию и принципы построения систем управления, действующих без непосредственного участия человека.
Первые автоматические устройства промышленного назначения были разработаны в связи с появлением паровых машин. Во второй половине 19 века появились автоматические устройства, основанные на использовании электрической энергии. Первоначально работы по созданию автоматических систем в механике, электротехнике, теплотехнике и других научных отраслях велись независимо друг от друга.
Для современной техники характерны значительное усложнение задач управления и рост объемов обрабатываемой информации, определяющие принципиальный качественный скачок автоматизации - широкое применение средств вычислительной техники.
Постоянное развитие науки и техники и интенсивное внедрение научно-технических достижений в производство обеспечивают непрерывное пополнение арсенала технических средств автоматики, вытесняя устаревшие элементы новыми, более современными конструкциями.
Основной задачей данной работы является ознакомление с основными методами построения систем автоматического управления и систем автоматического управления средствами, необходимыми для их реализации.
1. Исследование режимов системы автоматического управления
1.1 Определение передаточной функции замкнутой системы
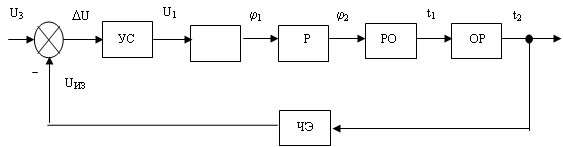 |
Рисунок 1. Функциональная схема системы регулирования температуры
ОР - объект регулирования;
РО - регулирующий орган;
Р - редуктор;
ДВ - двигатель;
УС - усилитель;
ЧЭ - чувствительный элемент;
UИЗ - измеренное напряжение;
DU - отклонение напряжения;
j1 - угол поворота вала двигателя;
j2 - угол поворота вала редуктора;
t1 - температура на входе объекта;
t2 - температура на выходе объекта;
UЗ - задающее напряжение;
U1 - входное напряжение регулирования двигателя.
1. Уравнение регулируемого объекта (1 + T1p) t2 = k1t1
где T1 - постоянная времени ОР; k1 - коэффициент передачи.
автоматическое управление регулятор режим
2. Уравнение регулирующего органа t1 = k2j2,где k2 - коэффициент передачи;
3. Уравнение двигателя вместе с редуктором (1 + T2p) ∙j2 = k3U1
где T2 - постоянная времени двигателя; k3 - коэффициент передачи;
4. Уравнение усилителя U1 = k4 ∙DU
где k4 - коэффициент передачи;
5. Уравнение чувствительного элемента Uиз = k5 ∙t2.
Передаточные функции:
1. Усилитель ![]() Ва(1.1)
Ва(1.1)
2. Двигатель и редуктор ![]() Ва(1.2)
Ва(1.2)
3. Регулирующий орган ![]() Ва(1.3)
Ва(1.3)
4. Объект регулирования ![]() Ва(1.4)
Ва(1.4)
5. Чувствительный элемент ![]() Ва(1.5)
Ва(1.5)

![]()
Определим тип исследуемого звена:
![]() Ва(апериодическое звено второго порядка)
Ва(апериодическое звено второго порядка)
Рассмотрим построение ЛАЧХ в случае апериодического звена второго порядка. Это звено не относится к числу элементарных звеньев, его можно представить как последовательное соединение двух апериодических звеньев первого порядка.
Для этого необходимо найти корни характеристического уравнения передаточной функции звена Т3, Т4.
![]() Ва(1.6)
Ва(1.6)
![]()
Тогда передаточная функция апериодического звена второго порядка запишется следующим образом:
![]() Ва(1.7)
Ва(1.7)
![]()
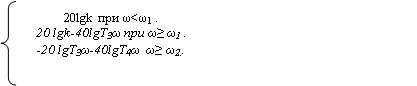 Уравнение асимптотической ЛАЧХ для апериодического звена второго порядка имеет вид
Уравнение асимптотической ЛАЧХ для апериодического звена второго порядка имеет вид
L (ω) ≈
Первая асимптота начинается в точке 20lgk и продолжается до точки сопрягающей частоты ω1=1/ T3 - начало второй асимптоты, которая откладывается с наклоном - 20дБ/дек. Третья асимптота начинается в точке сопрягающей частотыω2=1/ T3и имеет наклон уже - 40дБ/дек. В результате получим характеристику, изображенную на рис.2.
Вместе с этим смотрят:
Архитектуры реализации корпоративных информационных систем
Базы данных и их сравнительные характеристики
Гастроэнтеростимулятор ГЭС-35-01 "Эндотон-01Б"
Импульсный блок питания на базе БП ПК
Логические элементы и цифровые микросхемы