Off-line-оптимизация
На этом этапе следует проверить работоспособность созданной системы посредством всех средств fuzzy TECH. Отметим, что можно использовать заранее созданный программный симулятор вашего объекта управления, подобно модели контейнерного крана. Для связи системы управления с моделью используется специально разработанный протокол связи fTlink, в основу которого положена концепция обмена сообщениями Windows. Все необходимые средства для установления 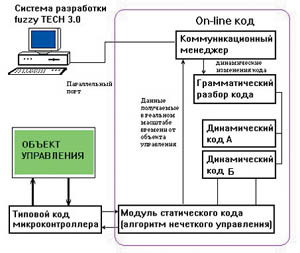 связи с вашей моделью находятся в исходных текстах программ связи, поставляемых с пакетом.
связи с вашей моделью находятся в исходных текстах программ связи, поставляемых с пакетом.
On-line-оптимизация
На этом шаге разрабатываемая система управления и реальный объект управления соединяются физической линией связи (см. рис. 8).
Такой вид отладки позволяет наблюдать поведение системы в реальных условиях и при необходимости вносить изменения в систему управления.
Реализация
На этом этапе необходимо получить окончательный вариант кода для конкретного микроконтроллера и, если нужно, связать его с вашей основной программой. Об оптимальности создаваемого fuzzy TECH кода можно судить по данным табл. ниже.
Основу программного кода, генерируемого пакетом fuzzy TECH, составляет аппаратно-ориентированное на конкретный тип процессора ядро. Поставляемое с пакетом fuzzy TECH MCU-96 программное ядро совместимо с такими контроллерами, как 8096BH, 8096-90, 80196KB/KC/KD, 80196 KR, 80196MC, 80196NT/NQ.
Важное замечание касается структуры генерируемого кода. Он, как правило, состоит из трех основных частей:
§ код библиотечных функций;
§ сегмент базы правил и функций принадлежности;
§ функции нечеткой системы.
Найти объем ОЗУ и ПЗУ, потребный для работы и хранения вашей системы, помогут следующие формулы:
§ для оперативной памяти,
 где
где
Sv - объем необходимой оперативной памяти;
ni - число входных переменных;
no - число выходных переменных;
ti - число термов во входной лингвистической переменной i;
tj - число термов в выходной лингвистической переменной j;
M- константа, равная 1 для 8-битного кода и 2 - для 16-битного;
C - константа, равная 28 байтам для MCU-96 и 7 байт для MCU-51;
§ для постоянной памяти:,
 где
где
Sf - размер базы правил в байтах;
ni - число входных переменных;
no- число выходных переменных;
nr - число правил в базе знаний;
ti - число термов во входной лингвистической переменной i;
tj - число термов в выходной лингвистической переменной j;
Ir - число входных условий для правила r;
Or - число выходных условий для правила r;
M - константа, равная 1 для 8-битного кода и 2 - для 16-битного.
Точный размер сгенерированного fuzzy TECH 3.0 кода указывается по окончании процесса компиляции.
|
Платформа |
20 правил 2 вх. и 1 вых. |
20 FAM-правил 2 вх. И 1 вых. |
80 правил 3 вх. и 1 вых. |
|
MCS-96, 16 бит, 80С196KD, встроенное ПЗУ, 20 Мгц |
0,28 мс 0,84 Кбайт ПЗУ 63 байт ОЗУ |
0,29 мс 0,87 Кбайт ПЗУ 63 байт ОЗУ |
0,43 мс 1.27 Кбайт ПЗУ 69 байт ОЗУ |
|
MCS-51, 8 бит, 80С51, встроенное ПЗУ, 12 МГц |
1,4 мс 0,54 Кбайт ПЗУ 25 байт ОЗУ |
1,5 мс 0,58 Кбайт ПЗУ 25 байт ОЗУ |
4,4 мс 1,0 Кбайт ПЗУ 29 байт ОЗУ |
Литература
1. Zade L. A. The concept of a linguistic variable and its application to approximate reasoning. Part 1, 2, 3 // Information Sciences, n. 8 pp.199-249, pp.301-357; n. 9 pp. 43-80.
2. Прикладные нечеткие системы: Перевод с япон./ К. Асаи, Д. Ватада, С. Иваи и др.; под ред. Т. Тэрано, К. Асаи, М. Сугено. - М.: Мир, 1993.
3. Mamdani E. H. Applications of fuzzy algoriths for simple dynamic plant. Porc. IEE. vol. 121, n. 12, pp. 1585-1588, 1974.
4. Smidth F. L. Computing with a human face. New Scientist, 6 may, 1982.
5. Yagashita O., Itoh O., and Sugeno M. Application of fuzzy reasoning to the water purification process, in Industrial Applications of Fuzzy Control, Sugeno M, Ed. Amsterdam: North-Holand 1985, pp.19-40.
6. Yasunobu S., Miyamoto S., and Ihara H. Fuzzy control for automatic train operation system, in Proc. 4th. IFAC/IFIP/IFORS Int. Congress on Control in Transportation Systems, Baden-Baden, April, 1983.
7. Yasunobu S., and Hasegawa T. Predictive fuzzy control and its applications for automatic container crane operation system, in Proc. 2nd. IFSA Congress, Tokyo, Japan, Julie 1987.
8. F. Fujitec, FLEX-8800 series elevator group control system, Fujitec Co., Ltd., Osaka, Japan, 1988.